МОУ «Средняя общеобразовательная школа №45»
Курсовая работа
Звуковой локатор.
Проверила: Стародубцева Е. А.
Выполнил: ученик 11 «б» класса
Ковалёв Дмитрий Васильевич
Кемерово.
2008 г.
Содержание
Введение
Кто они, летучие мыши
История открытия эхолокации
Использование локации в технике
Эхолокатор
Человеку есть чему поучиться у летучей мыши
Принцип действия модели звукового локатора
Усилитель сигнала
Усилитель мощности
Звуковой генератор и детектор
Частотомер
Сборка звукового локатора
Литература
Введение
Под словом «локация» понимается определение местоположения предметов, измерение их координат и параметров движения. В живой природе используются разнообразные формы и способы локации. Человек и большинство животных определяют местоположение окружающих предметов благодаря органам чувств, в основном зрению и слуху. Эти системы в функциональном отношении у некоторых животных доведены до высочайшего совершенства. Достаточно вспомнить о необычайной остроте зрения у дневных хищных птиц или точности звуковой пеленгации добычи совами.
Для обнаружения объектов окружающей среды некоторые животные используют и другие виды информации. Глубоководные кальмары, например, помимо обычных органов зрения, наделены особыми рецепторными приборами, способными улавливать инфракрасные лучи, а своеобразные органы — «термолокаторы» гремучих змей служат для поисков добычи (они воспринимают тепловое излучение живых существ и реагируют на разность температур в тысячную долю градуса).
Приведенные примеры, несмотря на их разнообразие, представляют собой различные варианты так называемой пассивной локации, когда исследуемые животные обнаруживают какие-либо объекты только путем приема той энергии, которую непосредственно излучают или переизлучают сами. Сравнительно недавно казалось, что возможности живой природы ограничиваются лишь средствами пассивной локации, т. е. более или менее чувствительными органами дистантного обнаружения.
В самом начале XX в. человечество создало принципиально новый, активный способ локации; при котором невидимую прежде цель облучают потоком электромагнитной или ультразвуковой энергии и обнаруживают с помощью той же энергии, но уже отраженной от цели. Радио- и гидролокационные станции (приборы активной локации) пришли на смену различного рода «слухачам» (приборам пассивного обнаружения) и в настоящее время получили широкое распространение при решении народно-хозяйственных, военных и космических проблем.
Области применения в технике радио- и акустической локации различны, ибо различны степень ослабления применяемых видов колебаний при распространении в неоднородных средах и скорость распространения электромагнитных и звуковых волн. Известно, что радиоволны в водной среде очень быстро затухают, тогда как звуковые волны распространяются на большие расстояния, и, наоборот, в воздухе звуковые колебания ослабляются во много раз сильнее, чем электромагнитные. Для обнаружения объекта в атмосфере и за ее пределами применяют радиолокаторы, так как скорость распространения радиоволн 300000 км/с, а скорость распространения звука в воздухе — лишь 340 м/с. Акустическая локация воздушных и особенно космических целей часто невозможна, ибо их собственная скорость может во много раз превосходить скорость звука. Акустическая локация или гидролокация стала основным средством обнаружения подводных объектов (скорость распространения звука в воде — 1550 м/с).
Принципы радиолокации, несомненно, подсказали биологам путь к решению одной из старых загадок природы, которая на протяжении длительною времени не поддавалась научному объяснению. Эту загадку поставили перед учеными обыкновенные летучие мыши. Что же это за животные и почему, они будоражили ученый мир на протяжении 150 лет? Попробуем в этом разобраться.
Кто они, летучие мыши
С давних пор совершенно необоснованно летучие мыши (см. приложения, рисунки 2, 3, 4) пользуются дурной славой. «Вопрос о летучих мышах есть вопрос другого света, вопрос, который пахнет ересью... Все покрыто тайной, обманом и мраком в этих двусмысленных существах, представляющих собой высшую степень противоестественности, мерзости и фантастичности. Летучая мышь - это химера, чудовищное невозможное существо, символ грез, кошмаров, призраков больного воображения. Всеобщая неправильность и чудовищность, замеченная в организме летучей мыши, безобразные аномалии в устройстве чувств, допускающие гадкому животному слышать носом и видеть ушами, все это как будто нарочно приноровлено к тому, чтобы летучая мышь была символом душевного расстройства и безумия». Так описывал летучих мышей французский натуралист А. Туссенель в 70-х годах прошлого столетия, выражая тем самым широко распространенное мнение об этих ночных безобидных животных. И даже в наше время, когда летучая мышь полностью «реабилитирована» и раскрыта ее тайна ориентации в темноте, все же для многих встреча с ней оставляет неприятное ощущение, и летучие мыши продолжают подвергаться бессмысленному гонению и даже уничтожению.
История открытия эхолокации
Хоть и велик человек, но не бесконечна его жизнь. Перед ним необъятная ширь пространства и необозримая глубь времени. Обо всем хочется узнать. Но вот беда — слишком быстро бегут годы.
Много ли человек может пройти, измерить своими маленькими шагами? И много ли он может сделать за те считанные дни, которые живет на земле? Но он не один, и в этом его сила.
Ладзаро Спалланцани (см. приложения, рисунок 1.) спешил. Ему уже было за шестьдесят. Годы давали о себе знать. Несколько лет выдающийся итальянский натуралист, профессор университета в Павии, занимался летучими мышами. Эти небольшие животные охотятся почти исключительно ночью, часто настигая добычу сверху или в лесных зарослях. Ясно, что визуальное обнаружение насекомых в таких условиях невозможно. Но тогда как же «видят» летучие мыши, как они находят дорогу в темноте? Вот вопрос, который мучил ученого.
Шел 1793 год. Только что кончилось время «высоких» и отвлеченных умозрительных рассуждений, наука приступала к экспериментальной проверке всего того, что окружало человека.
Ранним летним утром на колокольню собора города Павии поднялся старый человек. Это был Спалланцани. Сумрак только что начинал рассеиваться, и летучие мыши, возвращаясь из ночных полетов, прятались по разным закоулкам под сводами старой башни. Ученый ловил летучих мышей и сажал в мешок. Потом, нагруженный тяжелой ношей, он спустился с колокольни и пошел домой.
Дома Спалланцани выпустил пойманных зверьков в большом зале. Он решил вплотную заняться секретом ночных полетов летучих мышей. Только эксперимент мог дать ответ на этот вопрос. От потолка к полу были натянуты тонкие нити, они опутали всю комнату. Выпуская мышь из мешка, экспериментатор заклеивал ей глаза воском. И вот по старому залу заметались крылатые тени.
Но ни одна слепая летучая мышь не задела за нитку! Ни одна! Словно глаза им были и не нужны, чтобы видеть.
Не удовлетворившись опытами, в которых летучие мыши продолжали спокойно порхать с заклеенными глазами, Спалланцани решил продолжить начатый эксперимент, изменив несколько условия. Он выпустил на волю несколько зверьков, лишенных зрения, и через четыре дня снова отправился на колокольню собора.
В этот раз ученый снова наловил целый мешок летучих мышей. Среди них были и слепые мыши. В их желудках было полно комаров. Поймать в темноте насекомое—задача более сложная, чем пролететь между двумя натянутыми нитями. Значит, чтобы охотиться, этим зверькам совсем не нужны глаза. Спалланцани решил, что летучие мыши наделены каким-то особым, неведомым нам шестым чувством, которое и помогает им ориентироваться в полете.
Еще на целом ряде опытов ученый убедился, что мыши великолепно обходятся без зрения, но зато всякое повреждение слуха для них губительно.
В чем дело? Не могут же они видеть ушами?
Так зародилось сомнение. Чтобы все это объяснить, нужны были новые эксперименты. Для этого были изготовлены крошечные медные трубочки, полые внутри, которые вставлялись в уши летучих мышей. Но они по-прежнему спокойно летали, свободно и уверенно лавируя между десятками тонких нитей, натянутых в комнате. Зато стоило заткнуть трубочки пробками, как мыши бессильно падали, натыкаясь на все подряд.
Но как слух заменял им зрение? На этот вопрос никто не мог ответить. Мыши летали беззвучно, а стены и натянутые нити звуков не издавали, поэтому отличную ориентацию мышей вовсе нельзя было объяснить обостренным чувством слуха. Тогда как же видели летучие мыши? Этого Спалланцани так и не узнал. Его открытия в те годы были отвергнуты, высмеяны, а потом и забыты. Осталось только название «спалланцаниева проблема».
В середине прошлого столетия решением этой проблемы ученые заинтересовались одновременно в разных странах.
Любопытно, что первый, кто ею занялся, был не зоолог, а инженер — американский изобретатель Хайрем Максим. В годы гражданской войны его фамилией называли станковый пулемет, который он изобрел. Установленный на тачанке «максимка» был грозным оружием против белогвардейцев.
Плодовитый изобретатель, пытавшийся, между прочим, в свое время построить самолет с паровым двигателем, заинтересовался навигационным методом летучих мышей. Он предположил, что мыши издают звуки, неслышимые для человеческого уха, и ориентируются по возвратившемуся эху. На основании собственной биологической гипотезы Максим предложил новый прибор — эхолокатор, который должен был предотвращать в тумане столкновения судов с айсбергами.
Верная в принципе догадка была все же неточна. Ее автор считал, что первичным сигналом у мышей является звук от взмахов их крыльев. Поэтому он рекомендовал оборудовать суда источником звука очень низкой частоты, порядка 15 Гц. Приемник низкочастотных сигналов предполагалось установить в носовой части корабля. Слабое эхо, по замыслу изобретателя, должно было приводить в действие маленький колокольчик, а сильное — большой гонг, чтобы команда могла судить о серьезности опасности.
Новая идея навигации не привела ни к каким практическим результатам. Ошибка Максима была в том, что он неправильно определил частоту звукового сигнала, на который работал его прибор. Летучие мыши действительно пользуются в полете звуком, но не низких, а очень высоких частот— ультразвуком.
Другой ученый, голландец Свен Дийграаф, заметил, что летучая мышь прежде, чем пуститься в полет, раскрывает рот. Очевидно, предположил ученый, она издает неслышимые для человека звуки и «ощупывает» ими окрестности. В полете летучие мыши тоже то и дело раскрывают рот, даже когда не охотятся за насекомыми.
Дийграаф рассуждал так: поскольку стены и предметы, встречающиеся летучей мыши в полете, не издают никаких звуков, значит, кричат сами мыши. Эхо их собственного голоса, отраженное от окружающих предметов, извещает зверьков о препятствии на пути.
Это наблюдение навело ученого на мысль проделать следующий опыт. Он надел на голову зверька бумажный колпак. Спереди, точно забрало рыцарского шлема, в колпаке открывалась и закрывалась маленькая дверка. С закрытой дверкой на колпаке мышь совсем не могла лететь и то и дело натыкалась на предметы. Стоило лишь в бумажном колпаке поднять забрало, как зверек преображался, его полет вновь становился точным и уверенным.
Результаты своих наблюдений Дийграаф опубликовал в 1940 году, а в 1946 году советский ученый Е. Я. Пумпер сделал очень интересное предположение, которое хорошо объясняет физическую природу эхолокации. Он считал, что летучие мыши каждый новый звук издают сразу же после того, как услышат эхо предыдущего сигнала. Таким образом, ультразвуковые импульсы рефлекторно следуют друг за другом, а раздражителем, вызывающим их, служит эхо, воспринимаемое ухом.
Значит, чем ближе летучая мышь подлетает к препятствию, тем быстрее возвращается эхо и, следовательно, тем чаще издает зверек новые крики. Наконец, при непосредственном приближении к препятствию ультразвуковые импульсы начинают следовать друг за другом с исключительной быстротой. Это сигнал опасности. Летучая мышь инстинктивно изменяет курс полета, уклоняясь от направления, откуда отраженные звуки приходят слишком быстро.
Дальнейшие опыты показали, что летучая мышь перед стартом издает в секунду лишь 5—10 импульсов. В полете учащает их до 30. При приближении к препятствию ультразвуковые сигналы следуют еще чаще: 50 — 60 раз в секунду. Некоторые мыши во время охоты на ночных насекомых, настигая добычу, издают даже 250 «криков» в секунду.
Но не все звуки, используемые летучими мышами для навигации, совершенно не слышны.
Может быть, кому-нибудь из вас случалось теплым вечером наблюдать за полетом мышей и слышать издаваемые ими звуки. Они настолько слабы, что их легко принять за шорох листьев. Очевидно, поэтому-то их Спалланцани и не заметил.
Длительность слабо слышимой части импульсного сигнала весьма мала. Этот звук напоминает тиканье ручных часов. Однако, в отличие от часов, частота тиканья, издаваемого летучей мышью, может заметно изменяться.
Когда летучая мышь летит прямо на удаленное от нее препятствие, то она издает от пяти до двадцати гиканий в секунду. В тех случаях, когда перед ней возникает более сложная навигационная задача, например когда ей нужно избежать столкновения с живым предметом или с палкой, поднятой над головой, можно услышать, что тиканье внезапно учащается, пока не перейдет в слабое жужжание. То же самое происходит перед посадкой летучей мыши. Звуки тиканья при этом настолько слабы, что услышать их можно только в полной тишине и проявив значительное терпение.
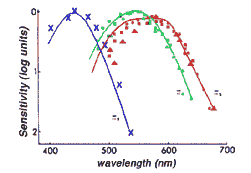
Объяснить тайну летучих мышей помогло появление новой электронной аппаратуры. В одной из лабораторий физического факультета Гарвардского университета в США Г.Пирс начал проводить исследования по изучению свойств ультразвуков, т. е. звуков, лежащих выше слухового порога человека. Под его руководством в 1937 г. был создан прибор — звуковой детектор, позволяющий улавливать звуки широкого диапазона частот. Именно этот прибор зарегистрировал неслышимые звуки летучих мышей, когда в 1938 г. студент-биолог упомянутого выше университета Дональд Гриффин принес в лабораторию Пирса полную клетку летучих мышей. Вспоминая об этом, Гриффин писал: «Как только я поднес летучих мышей к аппарату Пирса, сразу же обнаружилось, что они издают множество звуков, но почти все эти звуки попадают в диапазон частот, лежащих выше порога слышимости человека».
Пирс и Гриффин провели частотный анализ звуков, излучаемых летучими мышами в полете, и установили, что частоты этих звуков лежат в диапазоне 30000— 70000 Гц при наибольшей интенсивности в области 45000—50000 Гц. Далее они обнаружили, что животные издают звук не непрерывно, а в виде дискретных импульсов, длительность которых составляет 1/100 – 1/200 с.
Однако установление факта излучения ультразвука летучими мышами, несмотря на всю его важность, еще не объясняло способность животных беспрепятственно летать в полной темноте. Требовалось в условиях точного эксперимента доказать, что летучие мыши действительно используют ультразвук в целях ориентировки в пространстве и что они способны воспринимать эхо от этих звуков, отраженных от встречаемых на пути препятствий. Используя барьеры вертикально натянутых проволок, Гриффин и Галамбос получили количественную оценку способностей летучих мышей преодолевать препятствия при частичном или полном выключении зрения, слуха и при закрывании рта.
Эксперименты Гриффина и Галамбоса вновь подтвердили, что летучие мыши отлично ориентируются и без участия зрительной рецепции, но полное (двустороннее) или частичное (одностороннее) выключение слухового аппарата влечет за собой резкое ухудшение их способностей своевременно обнаруживать и избегать препятствия. Однако в этих опытах авторы пошли дальше своих предшественников. Они показали, что закрывание рта летучей мыши, лишающее ее возможности издавать эти высокочастотные звуки, оказывается столь же эффективным, как и плотное затыкание ее ушей.
Первоначально летучих мышей считали единственными представителями животного мира, использующими эхолокацию в целях ориентировки в пространстве.
Но уже 50-е годы принесли новые неожиданные открытия. В 1953г. звуковая локация была обнаружена у ночных птиц гуахаро, гнездящихся в глубоких пещерах Венесуэлы, а несколько позднее — у стрижей-саланганов, у одного из родов группы крыланов и ластоногих (см. приложения, рисунки 5, 6, 7), некоторых насекомых и грызунов. Но наибольшую сенсацию вызвали сообщения о наличии эхолокации у обитателей водной среды — китообразных (см. приложения, рисунки 8, 9). Честь этого открытия признается за пионером в изучении поведения и биологии дельфинов в неволе, куратором океанариума в Сан-Августино А. Мак-Брайдом.
Использование локации в технике
В туманные декабрьские дни 1943 года из портов Англии вышел большой караван грузовых кораблей. Корабли везли военные грузы в один из северных морских портов нашей Родины. У берегов вражеская воздушная разведка обнаружила караван. Немцы выслали наперерез англичанам «карманный» линкор «Шарнхорст».
Военные корабли, охранявшие караван, с помощью специальной радиоаппаратуры нащупали немецкий линкор и встретили врага огнем. Во мраке полярной ночи стрельба корректировалась по наблюдениям на экранах радиолокационных станций.
«Шарнхорст» попытался уйти от обстрела. Несколько раз ему это удавалось. Но радиолуч, способный пройти сквозь тьму и туман, вновь и вновь нащупывал немецкий линкор.
Бой в черноте полярной ночи длился около десяти часов. «Шарнхорст» пошел ко дну...
В том же 1943 году английская эскадра при помощи радио обнаружила в просторах Атлантического океана немецкий линкор «Бисмарк». Из низко нависших туч лил дождь. В этом морском сражении обе стороны применили радиолокационную аппаратуру.
Бой продолжался три дня. «Бисмарк» пошел ко дну от попадания трех торпед, после того как был предварительно поврежден огнем артиллерии. Однако немецкий линкор своим огнем пустил ко дну самый большой в то время в Англии крейсер «Худ».
По утверждению специалистов, гибель «Худа» последовала из-за консервативности командования английского крейсера.
Дистанцию до «Бисмарка» на «Худе» определили по показаниям оптического дальномера и показаниям радиолокационной станции. Когда между ними оказалось расхождение, то командование предпочло довериться оптике. Залп с «Худа» лег с недолетом: дистанцию правильно определила радиолокационная станция и неверно оптический дальномер. Внести поправку уже не удалось. Ответные снаряды с «Бисмарка» пробили броневой пояс крейсера и по чистой случайности попали в артиллерийский погреб. Последовал взрыв, и «Худ» быстро затонул.
Радиолокация была самой большой тайной в годы второй мировой войны. Не только гражданское население воюющих стран, но и не посвященные в эту тайну военные могли только удивляться необычному искусству операторов радиолокационных станций обнаруживать вражеские корабли и самолеты в темноте и в тумане.
И только после войны в печати стали появляться сведения об их устройстве и принципе действия. Оказалось, что действуют они точно так же, как и летучие мыши. Разница только в том, что мыши расстояние до препятствия определяют по запаздыванию звукового эха, а радиолокационные станции - по эху радиоволн.
Вы стоите у скалы и, громко крикнув, слышите эхо своего голоса. Зная скорость звука и измерив по часам время от начала крика до прихода эха, легко определить расстояние до скалы. Подобно этому радиолокатор излучает мощный электромагнитный сигнал, а затем принимает его слабое отражение. Правда, скорость распространения радиоволн не 340 м/с, как у звука, а 300 000 000 м/с. Почти в миллион раз больше! Поэтому и время прохождения сигнала до препятствия и обратно измеряется не в секундах, как в первом примере, а в микросекундах.
Антенна большинства радиолокационных станций имеет форму вогнутого прожекторного зеркала. Для уменьшения веса ее делают не из сплошных металлических листов, а решетчатой или из сетки. Такая антенна посылает радиоволны не во все стороны, как радиовещательная станция, а узким лучом, подобно прожекторного зеркала.
Направление радиолуча можно изменять по желанию: поворачивая антенну вверх или вниз, вправо или влево.
Если электромагнитный сигнал не встретит на своем пути препятствия, то он уйдет в космическое пространство и там исчезнет. Если же встретится какой-либо предмет - корабль, самолет, скала или айсберг, радиолуч отразится от него и пойдет обратно. Далее отраженный сигнал улавливается специальным приемником.
Следовательно, направление на цель с помощью радиолокатора определяется довольно легко. Цель, например корабль или самолет, находится там, откуда вернулось эхо.
Указателем направления служит зеркало антенны. Оно «смотрит» точно на цель. Если цель движется, то оператор станции, поворачивая антенну или изменяя ее наклон, может неотступно следить за нею, как следят за самолетом прожектористы, когда его удается «поймать» лучом прожектора.
Радиолокатор, как и летучая мышь, посылает свои сигналы отдельными, отрывистыми импульсами. Импульсный сигнал должен быть очень мощным, чтобы вообще можно было уловить его слабое эхо.
Длительность каждого импульса составляет несколько миллионных долей секунды. Передатчик обязан прерывать работу, чтобы приемник в паузах мог улавливать эхо, вернувшееся от цели. Здесь заложен такой принцип: «рот» молчит, когда «уши» слушают. Кроме того, когда передатчик излучает радиоимпульс, приемник должен быть закрыт для приема сигнала. В противном случае он «оглохнет» и перестанет работать.
Ученых давно интересовал такой вопрос: как летучие мыши ухитряются расслышать сравнительно негромкое эхо в том оглушительном ультразвуковом сигнале, который сами же излучают? Как им удается не оглохнуть?
Поиском ответа на этот вопрос занялся доктор О. Хенсон — анатом Уэльского университета. Ему удалось доказать правоту своего предположения, высказанного лет сорок назад. Оказалось, что у летучих мышей есть мышцы, закрывающие уши в момент излучения разведывательных ультразвуковых криков. Точно такое же устройство имеется в радиолокаторе. Когда его передатчик излучает импульс огромной мощности, приемник надежно заперт электронным устройством.
В первых радиолокаторах «рот» и «уши» — передающая и приемная антенны — помещались вдали друг от друга. Но так как передатчик и приемник все равно не могут работать одновременно, то такое разделение оказалось бесполезным. Теперь одна и та же антенна поочередно обслуживает то передатчик, то приемник.
Время, которое потратит радиосигнал на путешествие до цели и обратно, измеряет прибор, который называется индикатором радиолокационного изображения. Внешне он похож на обычный школьный осциллограф. По его экрану то и дело слева направо пробегает зеленый «зайчик», оставляя в виде следа светящуюся прямую линию.
В момент посылки станцией радиосигнала световой луч получает боковой толчок. От этого толчка светящаяся линия на экране подскакивает, образуя зигзаг. Такой же толчок получит луч в момент возвращения радиоэха. Светящаяся линия опять подскочит, образуя новый зигзаг. Расстояние между двумя зигзагами на линии, прочерченной электронным лучом, дает возможность определить расстояние до вражеского корабля или самолета. При этом никаких сложных вычислений делать не приходится. На экран заранее накладывается шкала с километровыми отметками.
Теперь грузовой или пассажирский пароход идет в туманной мгле или ночью так же уверенно, как и в ясный солнечный день. Радиолокатор заранее предупреждает капитана о приближении встречного судна или айсберга, в тумане пересекающего путь кораблю. Штурман больше не сетует на облака, скрывающие от него солнце и звезды, мешающие ориентироваться. Он так же уверенно чувствует себя при отсутствии видимости, как и летучая мышь ночью.
Для кибернетики и летучая мышь, и радиолокационная станция — это машины. А объединяет их тот обратный сигнал, который в том и в другом случае несет информацию о расстоянии до препятствия.
Эхолокатор
Всем удобен эхолокатор «Редут-0001», но вот беда — слишком мал радиус действия. Уметь определять препятствия на расстоянии до одного метра часто оказывается недостаточным.
Хорошо установить звуковой локатор на катер и отправиться с товарищами в длительное путешествие. Никакой туман не страшен, и можно уверенно плыть в темноте. Но для этого нужно, чтобы прибор определял дистанцию до препятствия на расстоянии 4—5 м так же уверенно, как и на одном метре.
На рисунке (см. приложения) в самом верху приведена временная диаграмма импульсных посылок летучей мыши. Там же дана формула, связывающая частоту посылок с расстоянием до препятствия.
В справедливости формулы можно убедиться, сравнивая экспериментальные данные, полученные американским ученым Дональдом Гриффином, с расчетными. Зоолог был далек от рассмотрения летучей мыши как машины с обратной связью и потому допустил неточность. Отсутствие кибернетического подхода при рассмотрении механизма работы живого локатора не дало ему возможности усмотреть имеющуюся закономерность. А то, что такая связь существует, видно из таблицы. Для расстояний 1,5 и 4 м экспериментальные и расчетные данные почти сходятся (см. приложения, таблица 1).
Человеку есть чему поучиться у летучей мышиПещеры служат убежищем иногда для нескольких тысяч и даже миллионов летучих мышей. Известно, что в Бракенской пещере, расположенной на юге США, обитает свыше 20 миллионов летучих мышей.
Каждый вечер это огромное количество зверьков покидает свое убежище, чтобы снова вернуться в него утром. При этом мыши, как правило, не сталкиваются и не мешают друг другу. Можно только удивляться совершенству их приемного аппарата, как при такой сложной звуковой какофонии каждая мышь безошибочно выделяет и принимает эхо именно принадлежащего ей сигнала.
Сейчас, когда в эфире работает столько радиостанций, порой мешающих друг другу, отличные «мышиные» принципы селекции собственных звуков привлекают внимание радиофизиков и инженеров.
Принцип действия модели звукового локатора
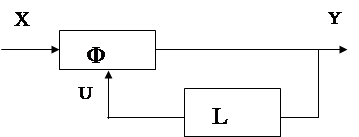
Создавая модель звукового локатора, мы также воспользовались решениями, используемыми летучей мышью. Блок-схема аппаратуры, данная на рисунке (см. приложения, рисунок 10), поможет разобраться в ее работе.
Всего в аппаратуре четыре «черных ящика», плюс громкоговоритель, микрофон и частотомер со стрелочным прибором. Назначение усилителей не требует пояснений — они усиливают сигнал. Звуковой генератор — это прибор, вырабатывающий сигнал определенной частоты. В разбираемой схеме частота равна 5000 Гц. Детектор выделяет из звукового импульса его огибающую. Частотомер измеряет частоту сигнала. По показаниям стрелочного прибора можно определять расстояние до препятствия, поскольку оно однозначно связано с частотой генерации.
Работает схема так. Сразу же после включения аппаратуры начинает действовать звуковой генератор. Но мощность его выходного сигнала, к сожалению, невелика.
Поэтому между звуковым генератором и громкоговорителем поставлен усилитель мощности. В результате громкоговоритель будет издавать довольно громкий звук с частотою 5000 Гц.
По прошествии некоторого времени эхо от посланного сигнала попадет на микрофон. Далее оно усилится усилителем сигнала и поступит на детектор. Как только на выходе детектора появится сигнал огибающей, он тут же заставит замолчать звуковой генератор. Так специально устроена схема. Пока на выходе детектора имеется какое-то напряжение, звуковой генератор не работает. Значит, работал генератор ровно столько, сколько времени потребовалось, чтобы сигнал от громкоговорителя дошел до микрофона. Столько же времени после этого громкоговоритель будет молчать.
Рассмотренный цикл, состоящий из звукового импульса и паузы, будет повторяться через каждые Т с. В результате схема будет генерировать звуковые посылки с частотой :
 Остается измерить частоту генерации и перевести ее в расстояние до препятствия. Эту задачу решает частотомер. Расстояние до препятствия равно:
Остается измерить частоту генерации и перевести ее в расстояние до препятствия. Эту задачу решает частотомер. Расстояние до препятствия равно:
где с — скорость звука в метрах за секунду, f — частота генерации в герцах.
Вот так работает мой звуковой локатор. Примерно так же работает и локатор летучей мыши.
Как и большинство кибернетических конструкций, описываемых в книге, модель звукового локатора разбита на самостоятельные платы. Всего плат три: плата усилителя сигнала, плата усилителя мощности и плата звукового генератора совместно с детектором. Начинать нужно с их изготовления и наладки. Тогда сборка всей аппаратуры не займет у вас много времени и локатор непременно сразу же заработает. При такой последовательности в работе вы не только глубже поймете функционирование каждого «черного ящика», но и сможете внести усовершенствования в блок-схему. Схема частотомера настолько проста, что монтируется она вся на небольшой панельке, укрепленной сзади стрелочного прибора.
Усилитель сигнала
Электрическая схема дана на рисунке 11 (см. приложения). Это трехкаскадный усилитель с коэффициентом усиления около 1000. Он одинаково хорошо усиливает переменное напряжение звуковой частоты в пределах от 100 Гц до 10 кГц. В радиоэлектронике в таком случае говорят, что усилитель имеет линейную частотную характеристику в пределах от 100 Гц до 10 кГц.
Схема усилителя интересна для нас еще тем, что она имеет четыре отрицательных обратных связи. На три каскада — четыре обратных связи! Не слишком ли много?
Поскольку все обратные связи отрицательные, то от усилителя можно ожидать стабильной работы. Как бы ни менялись внешние условия, включая температуру и питающее напряжение или параметры отдельных деталей, его основные характеристики будут оставаться неизменными. Это прежде всего относится к коэффициенту усиления.
Отрицательная обратная связь всячески старается свести к нулю любое первоначальное возбуждение схемы и тем самым стабилизирует ее работу. Другое дело положительная обратная связь. Достаточно незначительного отклонения от состояния равновесия, как оно будет все возрастать и возрастать, пока система не придет в другое, новое для нее состояние.
Чтобы пояснить стабилизирующее действие отрицательной обратной связи и дестабилизирующее действие положительной обратной связи, на рисунке 12 (см. приложения) приведены два примера из механики. Левый рисунок эквивалентен устойчивой системе, охваченной отрицательной обратной связью. Если по каким-либо причинам шарик отклонится от состояния равновесия, то после нескольких покачиваний он обязательно все же снова его займет. Что касается правого рисунка, то без пояснения понятно, что в этом случае положение шарика крайне неустойчиво. Он обязательно скатится вправо или влево. Этот случай эквивалентен поведению схемы с положительной обратной связью.
К примерам с шариками мы еще не раз вернемся. Более наглядно, пожалуй, и не расскажешь, что такое устойчивая система и как ведет себя неустойчивая система.
Под рисунками с шариком даны четыре электрические схемы. Три из них — различные усилители с отрицательной обратной связью. Четвертая схема представляет генератор звуковых частот. Эта схема охвачена положительной обратной связью.
Рассмотрение начнем со схемы «а». Это обычный однокаскадный усилитель с обратной связью в цепи эмиттера. Один такой каскад обеспечивает усиление сигнала в 50 — 100 раз.
Для чего понадобилось усложнять схему и включать резистор Rэ, а параллельно ему еще конденсатор Сэ?
Больше всего неприятностей при работе транзистора доставляет зависимость обратного тока коллектора Iк.о. от температуры. При повышении температуры обратный ток транзистора увеличивается примерно в два раза на каждые 10°С. Если, например, при температуре 20°С ток 1К.0 составляет 5 мкА, то при повышении температуры до 50° С он возрастет примерно до 40 мкА. Само по себе такое изменение тока коллектора (всего на 35 мкА) в большинстве случаев было бы не страшно. Но имеется одно «но», которое портит все дело. При включении транзистора в схему «а» в цепи коллектора, помимо тока, равного 10-Д будет протекать так называемый сквозной ток I’к.о.:
I’к.о.= Iк.о·(b+1),где b — коэффициент усиления транзистора, а Iб — ток базы, определяемый резистором R6.
Из формулы следует, что увеличение тока Iк.о на величину DIк.о =35 мкА будет соответствовать, например при b = 49, увеличению тока коллектора на величину:
DI’к.о.» Iк.о·(b+1)=35(49+1)=1,75мА.
Обратный ток коллектора возрос на 35 мкА, а общий ток — на 1,75 мА. С таким током уже нельзя не считаться.
Возрастание тока коллектора нежелательно по двум причинам. Во-первых, оно приведет к увеличению падения напряжения на резисторе Rэ-Напряжение между коллектором и эмиттером транзистора при этом резко уменьшится и может упасть почти до нуля. Во-вторых, увеличение тока коллектора влечет за собой изменение параметров транзистора и в первую очередь коэффициента усиления b.
Обе разобранные причины и заставили нас прибегнуть к усложнению схемы, чтобы повысить стабильность рабочего коллекторного тока при изменении температуры. Вот как теперь она работает.
Увеличение сквозного тока коллектора DI’к.о (см. приложения, рисунок 12 «а») при повышении температуры приведет к увеличению падения напряжения на резисторе Кэ. Вследствие этого напряжение между точками 1 и 2 уменьшится, что приведет к уменьшению тока Iб в резисторе Rб , а также и в базе транзистора. Составляющая тока коллектора IK= Iбb при этом уменьшится. Зная, что полный ток коллектора Iк состоит из двух составляющих
Iк=I’к.о.+Iб·bможно сделать такой вывод: температурные изменения первого слагаемого (I’к.о) приведут к обратным по знаку изменениям второго слагаемого (Iб·b). При правильном выборе параметров схемы оба слагаемых в некоторой мере компенсируют друг друга так, что коллекторный ток транзистора при этом остается неизменным.
Усилитель — это, пожалуй, самый простой «черный ящик». К тому же он чаще других встречается в кибернетических конструкциях.
Нигде обратная связь так широко не используется, как в радиоэлектронике.
Каждый из двух каскадов схемы «б» (см. приложения, рисунок 12) работает точно так же, как схема «а». Их работа стабилизируется отрицательной обратной связью за счет резисторов Rэ1 и Rэ2- Но этого оказалось недостаточно. За счет резистора Ro.c оба каскада охвачены еще третьей обратной связью. Разберем, как она работает.
Допустим, по каким-либо причинам, включая повышение температуры, несколько возрос коллекторный ток транзистора T1.Тут же уменьшится напряжение между коллектором первого транзистора и общим проводом, и как следствие упадет ток базы второго транзистора. При этом коллекторный ток Т2 также уменьшится, что повлечет уменьшение падения напряжения на резисторе Rэ2. Поскольку ток базы транзистора T1 в основном определяется этим напряжением, то он также уменьшится.
Кольцо обратной связи замкнулось, в результате чего коллекторный ток первого транзистора восстановит свое прежнее значение. В схеме «б» мы имеем дело с отрицательной обратной связью. Устойчивость работы схемы обеспечена.
За счет отрицательной обратной связи, охватывающей оба каскада Ro.c, схема «б» стабильно работает при изменении окружающей температуры от -10°С до +40°С. Общий коэффициент усиления равен 1000. По той же причине входное сопротивление усилителя повысилось с 500—1000 Ом до 1,5—2,0 кОм.
Кольцо обратной связи замкнулось, в результате чего коллекторный ток первого транзистора восстановит свое прежнее значение. В схеме «б» мы имеем дело с отрицательной обратной связью. Устойчивость работы схемы обеспечена.
За счет отрицательной обратной связи, охватывающей оба каскада Ro.c, схема «б» стабильно работает при изменении окружающей температуры от — 10°С до +40°С. Общий коэффициент усиления равен 1000. По той же причине входное сопротивление усилителя повысилось с 500—1000 Ом до 1,5—2,0 кОм.
Режим работы второго транзистора выбирается из условия, чтобы напряжение между коллектором Т2 и общим проводом было равно половине питающего напряжения. Это достигается подбором величины резистора Rэ1 в пределах 500—1000 Ом. Величина коллекторного напряжения первого транзистора не критична и может меняться в зависимости от b транзистора от 2 до 4 В.
Усилитель одинаково хорошо усиливает сигнал с частотами от 100 Гц до 10 кГц.
Очень интересна в работе схема «в» (см. приложения, рисунок 12). В литературе она называется эмиттерным повторителем. На эмиттерном резисторе Rэ полностью повторяется входной сигнал с коэффициентом передачи, несколько меньшим единицы.
Тут же возникает вопрос: для чего нужна такая схема, если она не усиливает сигнала?
Эмиттерный повторитель — это каскад, имеющий большое входное сопротивление (несколько сотен килоом) и очень малое выходное сопротивление, равное 5—20 Ом. Это, собственно, не усилитель, а трансформатор сопротивлений. Ставится он там, где нужно в схеме иметь низкоомный выход и высокоомный вход.
Входное сопротивление эмиттерного повторителя примерно равно Rвх»Rэ·b. Сопротивление Rэ рекомендуется брать в пределах 1—4,7 кОм, a b = 20—50. При этом Rвх будет лежать в пределах 20—250 кОм.
Ни в одной другой схеме нет такой отрицательной обратной связи, как в эмиттерном повторителе. Здесь она равна 100%. Это значит, что весь сигнал с выхода схемы полностью прикладывается к ее входу. Схема работает очень стабильно. Разберите схему обратной связи самостоятельно. Необходимый опыт у вас теперь есть.
Рассмотрев работу всех трех схем, «а», «б» и «в» (см. приложения, рисунок 12), можно сделать следующий вывод: отрицательная обратная связь всегда повышает устойчивость работы аппаратуры. Этого никогда не следует забывать, и надо стараться как можно чаще ею пользоваться.
Рассказывая об использовании обратной связи в радиоэлектронных схемах, следует напомнить о генераторах синусоидальных колебаний. Без них теперь не обходится ни радиопередатчик, ни радиоприемник. Схема, показанная на рисунке 3, г, есть генератор звуковых частот. Ее подробный разбор будет дан при описании платы «детектор — звуковой генератор».
Изготовление платы «усилитель сигнала» (см. приложения, рисунок 11) начинается с основания. Вырезается оно из куска гетинакса или текстолита толщиной 2,0—2,5 мм. Размеры берутся из рисунка 13 (см. приложения). Монтажными стойками служат кусочки медной проволоки (гвоздики) толщиной 1 мм, вставленные в отверстия платы, залитые на рисунке черной краской.
Данные деталей берутся из электрической схемы. Резистор R5 пока не ставить. Сделать это при налаживании схемы.
Транзисторы T1 —T3 перед установкой в схему проверяются на тестере. Коэффициент усиления должен находиться в пределах 50—100. Подойдут не только транзисторы, указанные на схеме, но и П13 —П16.
Налаживание платы сводится к подбору резистора R5. Временно ставится вместо него переменный резистор 1,5—2,2 кОм. Нужно подобрать величину так, чтобы вольтметр постоянного тока, подключенный параллельно R8, показывал 4,5 В. Далее переменный резистор заменяется постоянным. Его величина должна быть равна сопротивлению переменного резистора, замеренному на омметре.
Для окончательной проверки работы схемы на вход усилителя (точки 2—3) от любого звукового генератора подаётся сигнал в 1 мВ с частотой 1000 Гц.
Движок переменного резистора R3 поставьте в крайнее верхнее положение. На выходе (точки 6—7) вольтметр переменного тока должен показать не менее 1 В.
Разделив показания прибора на 1 мВ, вы получите величину коэффициента усиления усилителя. Как уже говорилось, он не должен быть меньше 1000. В крайнем нижнем положении движка резистора R3 вольтметр покажет отсутствие сигнала.
Усилитель мощности
Не всегда от усилителя требуется, чтобы он усиливал сигнал по напряжению. Иногда как раз все наоборот, на вход подается сигнал, больший по амплитуде, чем снимается с выхода.
Значит, такой усилитель вовсе не усиливает? Нет, усиливает. Только усиливает он сигнал не по напряжению, а по мощности. На вход его поступает сигнал незначительной мощности, ну, скажем, в несколько микроватт (мкВт), а с выхода снимаются сотни милливатт (мВт), а то и целые ватты (Вт).
Выходная мощность нашего усилителя (см. приложения, рисунок 14) составляет 0,2—0,25 Вт. Питается схема от любого источника постоянного тока напряжением 9—12 В. Одним из вариантов питания являются две последовательно соединенные батареи от карманного фонаря типа 3336Л.
Усилитель потребляет ток 30—35 мА в режиме максимальной мощности. Выход усилителя рассчитан на работу с электродинамическим громкоговорителем, имеющим сопротивление звуковой катушки 6—10 Ом. Нам подойдут малогабаритные громкоговорители типа 0,1 ГД, 0,15ГД, 0,2ГД и 0,25ГД. Входное сопротивление усилителя составляет 2 кОм. Чувствительность, соответствующая номинальной мощности, равна 0,2—0,3 В.
Схема (см. приложения, рисунок 14) имеет один каскад предварительного усиления напряжения на транзисторе Т1 и выходной двухтактный каскад, работающий в режиме класса В на транзисторах Т2 и Т3.
Выбранная схема выходного каскада делает усилитель очень экономичным по питанию. Транзисторы Т2 и Т3 работают при токе покоя коллектора в несколько миллиампер. Когда на схему не подается никакого сигнала, ток коллектора Т2 и Т3 равен 1—2 мА.
Пожалуй, самыми ответственными деталями усилителя являются трансформаторы Тр1 и Тр2. При их изготовлении нужно быть особенно внимательными. Лучше всего купить их в магазине. Междукаскадный трансформатор и выходной трансформатор — от карманных приемников «Гауя», «Селга», «Сокол», «Альпинист», «Атмосфера» или «Юпитер». Можно использовать и другие типы трансформаторов от малогабаритных приемников, лишь бы их намоточные данные были близки к приводимым ниже.
Самодельный междукаскадный трансформатор Тр1 выполнен на сердечнике из пермаллоевых пластин Ш-6 или Ш-8, толщина набора —6 мм. Первичная обмотка содержит 2000 витков провода ПЭ 0,1. Вторичная обмотка состоит из двух секций по 500 витков провода ПЭ 0,1 в каждой.
Выходной трансформатор Тр2 собирается на таком же сердечнике, что и междукаскадный. Первичная обмотка содержит две секции по 400 витков провода ПЭ 0,14. Вторичная обмотка имеет 100 витков провода ПЭ 0,35. Когда трансформаторы полностью собраны, проверьте их обмотки на обрыв.
Данные остальных деталей усилителя мощности приведены на рисунке 9. Транзисторы Т1—Т3 перед тем, как впаивать в схему, обязательно проверьте на тестере. Нам подойдут транзисторы с коэффициентом усиления от 30 до 60. Обратите обязательно внимание на начальный ток коллектора Iк.н. Отберите те транзисторы, у которых Iк.н. не превышает 5 мкА.
Вся электрическая схема, включая два трансформатора, монтируется на гетинаксовой или текстолитовой плате размером 120X80 мм, толщиной 2,0—2,5 мм.
По рисунку 6, а на плате произведите разметку отверстий. Те из них, что залиты краской, просверлите сверлом диаметром 1 мм. Затем во все миллиметровые отверстия вставьте кусочки медного провода (гвоздики) диаметром 1 мм и длиной 10 мм.
Расположение деталей на плате и сам монтаж сделайте строго по рисунку 15, б (см. приложения). Особенно внимательны будьте при распайке выводных концов трансформаторов. Напутаете в их подключении, усилитель работать не будет. Отыскать такую ошибку бывает трудно даже опытному инженеру, в распоряжении которого имеется вся необходимая измерительная аппаратура.
Наладка схемы сводится в первую очередь к проверке монтажа. Необходимо тщательно проверить распайку выводов транзисторов. При этом желательно убедиться в правильности номинальных значений резисторов. Кто из вас не имеет еще достаточного опыта, именно в этом чаще всего допускает ошибки. Если ошибочно впаяна деталь с другим номиналом, отыскать неисправность бывает очень трудно.
Необходимо в этой схеме замерить мощность сигнала, подаваемого на громкоговоритель. Она и является выходной мощностью нашего усилителя.
Подайте на вход платы (см. приложения, точки 2 —3, рисунок 15) от звукового генератора переменное напряжение 0,2 В, частотой 1000 Гц. К точкам 6—7 подключите громкоговоритель нужного типа. Перемещая движок резистора R1 вверх, добейтесь максимальной громкости сигнала. Усилитель работает!
![]() Любым вольтметром переменного тока измерьте напряжение сигнала, подаваемого на громкоговоритель (точки 6—7). Подсчет выходной мощности производится по формуле:
Любым вольтметром переменного тока измерьте напряжение сигнала, подаваемого на громкоговоритель (точки 6—7). Подсчет выходной мощности производится по формуле:
где U — напряжение по прибору в вольтах, R — сопротивление звуковой катушки громкоговорителя в омах.
Предположим, что прибор покажет напряжение 1,5 В, а сопротивление звуковой катушки равно 10 Ом. Тогда мощность сигнала, подаваемого на
громкоговоритель, равна:
![]()
В этом случае из громкоговорителя должен раздаваться довольно громкий чистый звук.
Если полученная мощность окажется меньше 0,2 Вт, то следует подобрать величину резистора R6. Эту операцию удобно проводить с помощью переменного резистора несколько большего номинала, нежели рекомендуемый. Последовательно с переменным резистором обязательно включите постоянный резистор в 2 — 3 кОм. Он предохранит транзисторы от случайной перегрузки большим током, который может возникнуть при выдвижении движка в сторону минимального значения.
Одновременно контролируется коллекторный ток обоих транзисторов. В режиме покоя, то есть при отсутствии входного сигнала, он не должен быть больше 1—2 мА. Миллиамперметр с током полного отклонения в 5 мА включается между средней точкой трансформатора Тр2 и проводом питания.
Как ни проста схема усилителя мощности, но и в ней не удается обойтись без обратной связи. Я уже говорил, в схемах радиоэлектроники они вас будут преследовать всюду, и к этому будьте всегда готовы. В рассматриваемой плате имеется одна отрицательная обратная связь за счет эмиттерного резистора R 4. Работа похожей схемы нами уже разбиралась. Такая связь не только стабилизирует работу первого каскада по температуре, но и увеличивает входное сопротивление до 4—5 кОм.
Звуковой генератор и детектор
Полная электрическая схема дана на рисунке 16 (см. приложения).
С первого взгляда любая схема кажется сложной и запутанной. Но этого не следует бояться, сложна она только вначале.
С чего начинать разбор электрической схемы неизвестного электронного устройства?
Вначале все устройство постарайтесь представить в виде «черного ящика» и уясните, для чего он нужен, для решения каких задач предназначен. Заодно уточните сигналы, которые подаются на «ящик» и которые с него снимаются.
Как бы ни было сложно устройство, разобраться в нем поможет описание блок-схемы машины.
Назначение блок-схемы — разбить машину на блоки (устройства) и рассмотреть, как они взаимодействуют друг с другом.
А что значит на языке кибернетики «взаимодействуют друг с другом»? Это значит, какими сигналами обмениваются между собою отдельные устройства, какие сигналы подаются на их входы и какие снимаются с выходов.
В нашем случае «черный ящик» — это плата звукового генератора и детектора. Разбирая блок-схему модели звукового локатора, вы должны были уяснить себе ее назначение. На вход платы (см. приложения, рисунок 16, точки 2—3) подается сигнал эха, который перед этим усиливается платой усилителя сигналов. Входной сигнал имеет вид прерывистых звуковых импульсов с частотой заполнения около 5000 Гц.
Далее нам известно, что в плате имеется схема генератора звуковых колебаний, которая генерирует только тогда, когда сигнал на входе отсутствует. При возвращении эха генератор тут же прекращает работать на время, пока сигнал не исчезнет. Сигнал звукового генератора, работающего все время вот в таком прерывистом режиме, и является выходным сигналом платы.
Больше о работе разбираемой платы вам пока ничего не известно. Но, оказывается, и того, что известно, вполне достаточно, чтобы самостоятельно составить электрическую схему внутренностей «черного ящика». Вариантов здесь будет, конечно, много. Каждый из вас захочет внести какие-либо «усовершенствования».
Разбирать работу незнакомой схемы советую всегда слева направо по направлению прохождения сигнала. Вы уже могли заметить, что вход схемы всегда чертится на рисунке слева, а выход — справа.
Как правило, если не все, то большинство каскадов вам всегда будет знакомо. Тогда остается разобраться во взаимодействии их друг с другом. Например, в плате рисунка 16 (см. приложения) первые два каскада вам должны быть известны.
Каскад на транзисторе T1—это электрический фильтр. Работает он так же, как и электронное реле, с той лишь разницей, что реагирует только на сигнал со строго определенной частотой. Когда сигнал на вход каскада не подается или подается с частотой, не равной частоте настройки фильтра, транзистор заперт.
Как вы думаете, почему в плате используется селективное электронное реле? То есть такое реле, которое реагирует на сигнал с определенной ча стотой, равной резонансной частоте контура L1C1.
С выхода первого каскада (см. приложения, рисунок 16) сигнал через резистор R4 поступает на эмиттерный повторитель, собранный на транзисторе Т2. Напряжение на его выходе полностью повторяет сигнал на входе.
Нагрузкой эмиттерного повторителя служит каскад на транзисторе Т3. Это и есть генератор звуковых частот. Когда транзистор T1 заперт, все напряжение питания платы через резисторы R 3 и R 4 прикладывается к базе транзистора Т2 и далее на схему генератора. В результате генератор генерирует звуковые колебания. Когда транзистор T1 открыт — генератор не работает, напряжение на него не подается.
Генератор, генерировать... Как часто мы произносим эти слова. А что такое генератор?
Если обратиться к «Словарю радиолюбителя» С. Э. Хайкина (1966), то там сказано так: «Генератор — это прибор, генерирующий (создающий) электрические напряжения или токи». Кибернетику трудно согласиться с таким определением. На любое незнакомое устройство он смотрит как на «черный ящик» и старается прежде всего исследовать его входной и выходной сигналы.
Физика это положение тоже подтверждает. Из нее вы знаете, что перпетуум мобиле невозможен!
Чтобы генератор генерировал, на него нужно подавать питающее напряжение. Это и будет в конкретном случае входным сигналом разбираемого «черного ящика». Выходным сигналом является генерируемое переменное напряжение звуковой частоты. Если входной сигнал отсутствует, то есть если на схему генератора не подается питающего напряжения, то, естественно, выходной сигнал будет равен нулю.
Внутренности генератора могут быть самыми разными. Но во всех случаях в схеме должен быть усилитель с коэффициентом усиления больше единицы, охваченный положительной обратной связью.
Разберем, как действует положительная обратная связь в схеме рисунка 16 (см. приложения).
Усилитель в схеме найти нетрудно. Он собран на транзисторе Т3. Его нагрузкой является колебательный контур L2, C3, С4. Подобный усилитель в радиотехнике называется резонансным усилителем. Ему не безразлично, какой сигнал усиливать. Если частота входного сигнала близка к резонансной частоте контура, коэффициент усиления резко возрастает. Для всех остальных частот он может быть даже меньше единицы. Вот почему рассматриваемую схему еще называют селективным усилителем.
Цепь положительной обратной связи — это провод, идущий от конденсаторов С3—С4 к резистору R7. Поскольку используется селективный усилитель, то схема будет генерировать сигнал только с частотой, равной резонансной частоте контура L2, C3, С4. Это потому, что положительная обратная связь работает только на этой частоте. Перестройку частоты проще всего производить, изменяя индуктивность катушки сердечником подстройки.
В схеме генератора можно использовать и обычный усилитель, где нагрузкой является резистор. Но в этом случае условия генерации соблюдаются одновременно для большого числа гармонических сигналов с различными частотами. Получится обычный мультивибратор, с работой которого вы уже знакомы по второй главе.
На этом разбор схемы звукового генератора и детектора закончим.
Чертеж и монтажная схема даны на рисунке 8.
Катушки L1 и L2 намотайте, используя ферритовый броневой сердечник типа СБ-14 или ОБ-12. Число витков — 200—250, провод — ПЭ 0,1.
Налаживание платы лучше начинать с генератора. Подайте на него от двух последовательно включенных батареек 3336Л необходимое напряжение и подбором резистора R5 добейтесь, чтобы схема генерировала. Подключите к точкам 6—7 высокоомные головные телефоны, и вы услышите довольно громкий писклявый тон. Генератор работает. Измерьте частоту выходного сигнала. Если она значительно отличается от 5000 Гц, то попробуйте сердечником катушки L2 перестроить индуктивность. Когда и это не помогает, изменяйте число витков катушки.
Вторым настраивается селективное реле на транзисторе T1. Резонансная частота должна равняться частоте сигнала генератора. В противном случае придется подстраивать контур L1C1.
Для окончательной проверки платы восстановите схему и включите питание. В телефонах, подключенных на выход (точки 6—7), вы услышите звук. Соедините коллектор транзистора Т1 с общим проводом питания, звук должен пропасть. Напряжение питания в этом случае на генератор не подается. Вот почему он замолчал.
Тот же результат вы получите, если точку 2 соедините с точкой 1. Транзистор T1 откроется, и, как результат, напряжение на его коллекторе упадет до нуля.
Испытания схемы подтвердят вам не только исправную работу всех трех каскадов, но и правильное их совместное функционирование. Ни одну плату, а тем более такую сложную, как эта, нельзя ставить в устройство без предварительной проверки.
Частотомер
Это прибор, на вход которого подается электрический сигнал неизвестной частоты напряжением 1—5 В. Частота определяется непосредственно по стрелочному прибору, шкала которого размечена в герцах. И что самое ценное, в описываемом частотомере никакой предварительной градуировки не требуется. Все достигается расчетным путем с вполне достаточной для нас точностью.
При использовании частотомера в модели звукового локатора шкалу удобнее разметить прямо в метрах до препятствия. Как перевести метры в герцы и наоборот, я уже писал в начале раздела.
Схема частотомера приведена на рисунке 18 (см. приложения). Принцип измерения основан на заряде и разряде конденсатора С2. Проследим с самого начала, как все получается. Во-первых, это поможет понять работу прибора, а во-вторых, нам нужно вывести формулу, которая бы связала показания миллиамперметра с измеряемой частотой сигнала.
Измеряемый сигнал через конденсатор С1 и ограничительный резистор R2 поступает на базу транзистора T1. Посмотрите повнимательнее на схему: то, что нарисовано слева, — это самый обычный каскад усиления напряжения. Единственное, что может вас смутить, так это несколько необычная его нагрузка, состоящая из двух диодов Д1 и Д2 и стрелочного прибора.
Рабочая точка транзистора выбирается строго на середине линейного участка, что достигается соответствующим подбором резистора R1. В результате на выходе каскада на резисторе К3 имеем ограниченное с двух сторон переменное напряжение неизвестной частоты. Но это только тогда, когда величина входного сигнала превышает 1 В. Вот почему каждый раз перед определением частоты неизвестного сигнала требуется измерить его напряжение.
Когда транзистор T1 заперт, все напряжение источника питания прикладывается к конденсатору С2, последовательно включенному с диодом Д1 и миллиамперметром. Диод Д2 в этот момент заперт, так как включен в обратном направлении. Конденсатор С2 будет заряжаться. Его зарядный ток, проходя по рамке прибора, вызовет отклонение стрелки, пропорциональное среднему значению проходящего тока.
В тот момент, когда транзистор ti открыт, конденсатор С2 разряжается через диод Д2 и проходное сопротивление коллектор—эмиттер транзистора.
Постоянные времени цепей заряда и разряда выбраны таким образом, что при каждом цикле заряд — разряд конденсатор успевает зарядиться до напряжения источника питания и разрядиться до нуля. Поэтому можно считать, что полный заряд конденсатора равен:
![]()
где Q—заряд конденсатора, а Eб—напряжение источника. Об этой формуле вы можете прочитать в учебнике по физике для 10-го класса.
Весь ток электрического заряда протекает через миллиамперметр за время одного периода измеряемого сигнала — Тизм. Отсюда среднее значение тока, то есть ток, который показывает прибор, равен:
|
|
где fизм— частота в герцах. Остальные обозначения вам уже известны. Чтобы получить окончательное выражение формулы. Q мы заменили на
![]()
Теперь решим полученное выражение относительно fизм и получим искомую формулу, связывающую частоту сигнала с показаниями миллиамперметра:
![]()
где С2 — емкость в микрофарадах, Iпр — показания стрелочного прибора в миллиамперах, Еб—напряжение источника питания в вольтах, Еб = 9 В.
Емкость конденсатора и напряжение питания постоянны. Следовательно, ток, проходящий через прибор, зависит только от измеряемой частоты сигнала. При конденсаторе С2 = 1,1 мкФ расчетная формула принимает вид:
![]()
Например, прибор показывает ток, равный 0,5 мА. В этом случае измеряемая частота равна 50 Гц.
В схеме частотомера используется миллиамперметр с током полного отклонения в 1 мА, что будет соответствовать частоте 100 Гц.
При С2 =0,11 мкФ расчетная формула принимает вид:
![]()
что соответствует 1000 Гц при полном отклонении стрелки прибора.
Изготовление частотомера начинайте с подбора необходимых радиодеталей согласно электрической схеме (см. приложения, рисунок 18).
В качестве миллиамперметра подойдет любой стрелочный прибор постоянного тока с чувствительностью 1 мА на всю шкалу.
Необходимую величину емкости С2 проще всего получить из двух параллельно включенных конденсаторов.
Транзистор T1 может быть любого .типа из МП39—МП42. Лишь бы он был исправен и имел коэффициент усиления 50—100. Перед тем, как его впаивать в схему, не забудьте проверить на тестере.
Величина резистора R1, подбирается в зависимости от b транзистора из условия работы каскада строго на середине линейной характеристики.
При проверке диодов Д1 и Д2 на омметре обратите внимание на величину прямого сопротивления. Отберите те, у которых наименьшее прямое сопротивление. Схема настолько проста, что предварительно собирать ее на макетном шасси нет необходимости. Один из вариантов расположения деталей на плате, а также общий вид прибора показаны на рисунке 9.
После того, как прибор смонтирован и подобрана величина резистора R1 еще раз проверьте полярность подключения диодов. Шкалу стрелочного прибора разметьте в герцах или метрах.
Сборка звукового локатора
Полная схема звукового локатора дана на рисунке 19 (см. приложения). Она включает три платы: плату усилителя сигналов, плату усилителя мощности и плату звукового генератора с детектором. С работой и изготовлением всех трех плат вы познакомились. Как работает частотомер, тоже знаете. Микрофон и громкоговоритель можно использовать от эхолокатора «Редут-0001». Не забудьте, что громкоговоритель подключается без выходного трансформатора, прямо к точкам а-а (рис. 5).
Из физики вы знаете, как подсчитать длину волны звуковых колебаний, зная их частоту и скорость звука. Формула такая:
![]()
где l — длина волны звука в воздухе в сантиметрах, с — скорость звука в воздухе в сантиметрах за секунду, f — частота звуковых колебаний в герцах. В нашем локаторе частота звуковых колебаний выбрана равной 5000 Гц. Отсюда длина волны звуковых колебаний в воздухе равна 6,8 см.
Рупор будет тогда излучать и принимать звук узким пучком, когда его размеры больше длины волны. Рупор от локатора «Редут-0001» этому условию полностью не удовлетворяет. Лучше сделать другой рупор, большего размера, а капсюль оставить от ДЭМШ-1. Одно плохо: сразу же увеличатся габариты аппаратуры в целом.
Конструктивно локатор может быть выполнен в двух вариантах (см. приложения, рисунок 20). Один из них рассчитан на установку аппаратуры на катер или автомобиль, второй — чтобы держать в руках. Оба варианта питаются от комплекта батарей из двух 3336Л.
Проверку работы локатора начинайте на предметах, имеющих большую поверхность отражения, таких, как забор или стена дома. Убедившись, что все работает, переходите к обнаружению стволов деревьев и густых кустарников. При некотором опыте вы и их будете уверенно «видеть» на расстоянии до 5 м.
Используя звуковой локатор для измерения скорости звука, частоту импульсных посылок придется определять с большей точностью. Описанный частотомер для этих целей уже не подойдет. Он слишком груб. Здесь подойдет метод измерения частоты с помощью осциллографа и звукового генератора по фигуре Лиссажу.
Установите жестко локатор на расстоянии пяти метров от глухой стены здания и измерьте частоту звуковых импульсов в герцах. Скорость звука при этом определяется по формуле:
с – 4l •f (м/с),
где l - расстояние от рупора до стены в метрах.
Чем точнее измерите расстояние до препятствия и частоту импульсов, гсм точнее получите результат. Эксперимент можно усложнить и попытаться определить зависимость скорости звука от температуры и влажности воздуха.
Хотя звуковой локатор я и назвали моделью, но работает он отлично, как настоящий!
Литература
1. Э.Ш.Айрапетьянц, А.И.Константинов, «Эхолокация в природе», Ленинград, издательство «Наука» ленинградское отделение, 1974г.
2. В.Г.Борисов, “Юный радиолюбитель”, Москва, издательство «Радио и связь», 1972г.
3. А.И.Константинов, «Эхолокация животных», Москва, издательство «Знание», 1982г.
4. Ю.М.Отряшенков, “Юный кибернетик”, Москва, издательство «Радио и связь», 1978г.
5. Р. Сворень «Электроника шаг за шагом», Москва, издательство «Детская литература», 1986г.
6. С.Э.Хайкин, “Словарь радиолюбителя”, издательство «Радио и связь», 1966г.
7. «Большая энциклопедия животного мира», / Е.Л.Богатырева, Т.В.Воронина, М.В.Комогорцева и др., Москва, издательство «Росмэн», 2001г.
Похожие работы
... , очевидно, від якихось хижих, близьких до предків собак звірів (а можливо, і від комахоїдних!), усі зв'язки із сушею в них давно загублені, а пристосування до життя в морях, деяких озерах і ріках виражені краще, ніж у всіх водяних ссавців. Тіло схоже на риб'яче, але з горизонтальними лопатами хвостових плавців. Передні кінцівки еволюція перетворила в ласти, задні зникли зовсім, збереглися лише ...

... по отношению к системе имитационного моделирования цепочка – человек с приобщением вспомогательных средств и методов программного обеспечения [11]. При этом исследователь-проектировщик выполняет функцию преобразования информации, которая состоит в интерпретации результатов и принятия решений относительно управления экспериментами и обобщением информации к базе знаний интеллектуального робота. ...
... их зелёными. Так вас научили. Никакие рассуждения и эксперименты не могут доказать, что вы воспринимаете зелёный и красный цвет не так как все. Также и вы не можете установить, что другие люди видят розу в ином цвете. Вы считаете, что все люди в принципе устроены одинаково, и они воспринимают цвет розы таким же "красным", каким её видите вы. Из этого мысленного эксперимента кроме всего прочего ...


... сигналов, передающихся от одного живого организма другому (от родителей - потомкам) или от одних клеток, тканей, органов другим в процессе развития особи; 6. в математике, кибернетике – количественная мера устранения энтропии (неопределенности), мера организации системы; 7. в философии – свойство материальных объектов и процессов сохранять и порождать определенное состояние, которое в ...
0 комментариев