БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра ЭТТ
РЕФЕРАТ
На тему:
«Общие требования предъявляемые к стимуляторам мышц человека в многоканальная электростимуляция опорно-двигательного аппарата»
МИНСК, 2008
В случае биоуправляемой стимуляции опыт использования электрических сигналов для управления движением показывает, что выбор вида и параметров стимуляции должен базироваться на ряде показателей, которые могут быть объединены в три группы: 1) физиологические, характеризующие субъективное восприятие сигналов и влияние их на процессы в организме; 2) функциональные, характеризующие качество выполнения движения (сила сокращения, точность и объем движения); 3) технические (минимальное потребление энергии, возможность регулирования управляющего сигнала и т. д.). Сравнение различных видов стимулирующих сигналов с точки зрения их использования в системах управления движениями возможно только на основании предварительного выбора оптимальных параметров внутри одного вида по трем перечисленным выше показателям. С этой целью проанализированы различные параметры синусоидального стимулирующего сигнала и прямоугольных импульсов (одно- и двухполярные) и охарактеризованы их достоинства и недостатки при биоэлектрическом управлении движениями человека. В ходе исследования амплитудных и частотных характеристик некоторых электрических и механических параметров активности нервно-мышечных групп предплечья была изучена эффективность синусоидальных стимулирующих сигналов в диапазоне частот 100 Гц — 10 кГц (рис. 1).
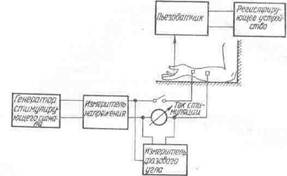
Рисунок 1 – Блок-схема снятия амплитудных и частотных характеристик сокращений мышц предплечья.
Результаты исследований показали, что независимо от частоты стимула амплитудные характеристики мышечного напряжения (момент) в большим диапазоне усилий сохраняют приблизительно линейный характер (рис. 2). В околопороговой области наблюдается значительная нелинейность. Такая зависимость соответствует общеизвестным физиологическим данным, полученным на изолированных мышцах.
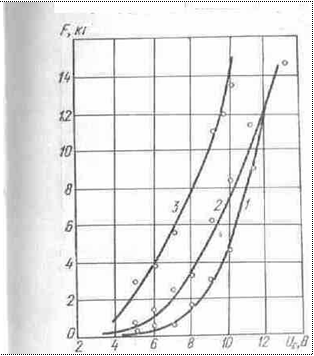
Рисунок 2 – Зависимость силы сокращения мышц предплечья от интенсивности стимуляции при частоте:1 — 500 Гц; 2 — 200 Гц: 3 — 5000 Гц
Характерную область «насыщения» при сверхмаксимальных раздражениях, когда дальнейшее увеличение интенсивности раздражения не приводит к увеличению ответной реакции, у большинства испытуемых получить не удалось из-за возникновения сильных болевых ощущений. Лишь у некоторых испытуемых в области 2—5 кГц можно было достигнуть насыщения, которое наступало при увеличении силы раздражения более чем в три раза относительно пороговой.
Аналогичные соотношения между стимулом и реакцией наблюдались при прямой внутримышечной стимуляции, когда при увеличении амплитуды раздражающего импульса разряд ЭМГ увеличивался и достигал максимума при величине стимула, превышающей пороговую втрое. Дальнейшее увеличение амплитуды стимула приводило к уменьшению амплитуды разряда .
Отношение силы раздражения, вызывающего болевую реакцию, к пороговой (у) на данной частоте (пределы комфортной зоны) характеризует диапазон интенсивностей, в котором можно изменить сигнал управления. Это отношение максимально в области 2—5 кГц к составляет 2,5—3. При увеличении и уменьшении частоты стимуляции пределы комфортной зоны сужаются. Чем больше у, тем точнее можно дозировать движение. Поэтому там, где требуется получить более высокую точность движения, предпочтение отдается области 2—5 кГц.
Межэлектродное сопротивление (сопротивление стимулируемых нервно-мышечных групп с учетом сопротивления прохождению стимулирующего сигнала через кожу и жировую прослойку) в диапазоне частот 500 Гц — 10 кГц не претерпевает существенных изменений в зависимости от интенсивности стимула (2 и 3 на рис. 3). Наоборот, в диапазоне 100—200 Гц с ростом амплитуды стимула межэлектродное сопротивление уменьшается. На низких частотах 100—500 Гц изменяется и характер сопротивления. С ростом стимула возрастает его активный компонент, на что указывает уменьшение угла сдвига фаз между током и напряжением стимуляции. В области 2—10 кГц наблюдается относительная независимость фазовых сдвигов от интенсивности стимула.
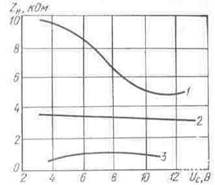
Рисунок 3 – Изменение межэлектродного сопротивления в зависимости от интенсивности стимуляции при частоте: 1 — 200 Гц; 2 — 500 Гц; 3 — 5000 Гц.
Исследование частотных характеристик мышц предплечья показало, что для различных испытуемых область частот, при которых пороговые напряжения минимальны, и при неизменной интенсивности стимула достигается наибольший момент в лучезапястном суставе, занимает диапазон 2—5 кГц (рис. 4 – 5).
Максимальное мышечное напряжение (момент) наблюдается при частотах, совпадающих с максимумом фазовых сдвигов (рис. 6). Указанная закономерность сохраняется в широком диапазоне интенсивностей стимула. Как правило, при длительной стимуляции оптимальная частота снижается, а максимум мышечного напряжения становится слабо выраженным. Поэтому наиболее простым способом определения оптимальной частоты стимула для данного индивидуума является измерение (разовых сдвигов. В ряде случаев фазовые сдвиги между током и напряжением стимуляции достигают максимальных значении в области 4—5 кГц и далее при увеличении частоты остаются постоянными. В таких случаях оптимальная частота, на которой мышечное напряжение максимально, совпадает с минимальной частотой, на которой указанные фазовые сдвиги достигают максимума.
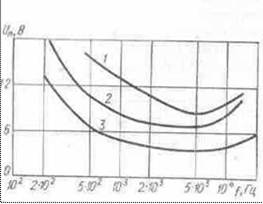
Рисунок 4 – Частотные характеристики порога раздражения для различных испытуемых
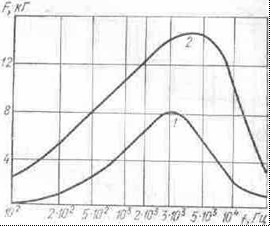
Рисунок 5 – Частотные характеристики сокращения, в условиях постоянства интенсивности стимула:1 — сверхпороговой; 2 — максимальной.
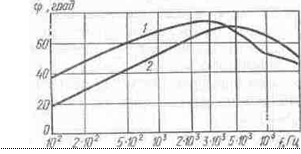
Рисунок 6 – Зависимость фазовых сдвигов от частоты в условиях постоянства интенсивности стимуляции: 1 — сверхпороговой; 2 — максимальной
С точки зрения энергетических затрат при стимуляции можно указать на две оптимальные области: 200 Гц и 2—5 кГц, при этом область 200 Гц энергетически более выгодна. Данная область более приемлема для воспроизведения медленно меняющихся усилий при биоэлектроуправлении. Так, на низких частотах мышечное напряжение при неизменном уровне стимула уменьшается значительно медленнее (до половинного значения за 30 и более секунд), чем при стимуляции повышенными частотами (2 кГц и выше). В последнем случае мышечное напряжение спадает за 5 и менее секунд. Нарастание мышечного напряжения при стимуляции в области высоких частот наступает почти мгновенно с подачей сигнала. При построении биоэлектрических систем управления следует учитывать эти особенности. Оптимальная система биоэлектроуправления должна иметь перестраиваемую частоту стимула в соответствии со скоростью движения в данный момент времени. Частота стимула должна быть пропорциональна производной программного (или управляющего) сигнала, изменяясь в пределах от 200 Гц до 5—7 кГц при изменении производной от нуля (поддержание постоянного усилия или суставного угла) до некоторого максимального значения, определяемого максимальной скоростью движения.
Выбор вида управляющего сигнала находится в прямой зависимости от способа передачи анергии тканям — с помощью поверхностных или имплантируемых электродов. Несмотря на определенные трудности использования имплантируемых электродов, связанные главным образом с необходимостью хирургического вмешательства, опасностью инфекции, реакцией на инородное тело со стороны организма и т. д., в ряде случаев их использование может оказаться весьма полезным. Достаточно сказать, что поверхностные электроды могут быть применены лишь для 60% мышц конечностей человека.
Возможность фиксировать положение электродов, незначительная энергия, требуемая для возбуждения и сокращения мышечных групп, снижение субъективных ощущений при стимуляции — вот лишь неполный перечень преимуществ имплантируемых электродов перед поверхностными. При использовании имплантируемых электродов в системах управления мышечной активностью целесообразно в качестве стимулирующего применять биполярный сигнал, так как он в отличие от униполярного той же мощности не вызывает поляризации и повреждения ткани под электродами во время длительного непрерывного действия.
Учитывая опыт использования синусоидальных и прямоугольных униполярных импульсных стимулирующих сигналов в устройствах биоэлектрического управления, нами был разработан и испытан двухполярный импульсатор со следующими параметрами знакопеременных импульсов: длительность 0,05—1,0 мс; частота повторения 80—500 Гц.
Исследования проведены для управления активностью сгибателей кисти и пальцев на здоровых испытуемых. Методика исследования не отличалась от таковой при использовании синусоидального стимулирующего сигнала. Результаты показали, что оптимальная длительность знакопеременных импульсов составляет 0,1—0,3 мс. При увеличении и уменьшении длительности максимальное мышечное напряжение в пределах комфортной зоны падает, а мощность сигнала, соответствующая максимальному усилию, возрастает. Частоту повторения знакопеременных импульсов следует выбирать в пределах 80—200 Гц. Дальнейшее увеличение частоты повторения приводило к возрастанию болезненности ощущений. Сравнение двухполярного импульсного сигнала с синусоидальным выявило определенные преимущества первого по показателю средней потребляемой мощности (в 2—3 раза).
Результаты исследования больных с центральными параличами и парезами различной этиологии до лечения», в процессе (через 8, 10 сеансов) и после восстановительного курса лечения по методу ПМБЭУ показали, что амплитудные и частотные электрические я механические характеристики нервно-мышечных групп при патологии двигательной функции центрального происхождения в общем подчиняются тем же закономерностям, которые имеют место у здоровых людей.
Большом разброс самих величин электрических и механически параметров не позволил выявить их отличий в норме и при патологии двигательной функции центрального происхождения. Поэтому для управления мышечной активностью при патологии двигательной функции центрального происхождения, как и для управления мышечной активностью здоровых людей, по физиологическим и функциональным показателям наиболее приемлемыми частотами синусоидального стимулирующего сигнала является область 2— 5 кГц, а прямоугольных импульсов — 80—200 Гц при длительности 0,1—0,5 мс.
Индивидуально для каждого больного изменение электрических и механических характеристик пораженных нервно-мышечных групп в процессе лечения подчиняется определенным закономерностям, которые отражают процесс восстановления двигательной функции. Так, у большинства больных с центральными гемипарезами, у которых в результате восстановительного лечения имело место клинически наблюдаемое улучшение двигательной функции в лучезапястном суставе, при исследовании после окончания курса лечения наблюдалось снижение мощности стимула, вызывающего возбуждение и сокращение мышечных групп, и возрастание мышечного напряжения в пределах комфортной зоны. Все случаи наблюдавшихся изменений энергетических затрат на возбуждение и сокращение могут быть разделены на две группы: апериодические изменения мощности стимула в процессе восстановительного лечения и колебательные изменения. Последняя особенность свидетельствует о том, что количество сеансов в курсе лечения нужно, по-видимому, определять индивидуально для каждого больного в зависимости от течения восстановительного процесса и реакции нервной системы на используемый метод лечения. Динамика изменения энергетических затрат, необходимых для возбуждения и сокращения нервно-мышечных групп при двигательных расстройствах, может служить дополнительным критерием при оценке эффективности восстановительного лечения.
Подводя итоги анализа эффективности различных видов и параметров стимулирующего сигнала при управлении движениями е помощью поверхностных электродов, можно сделать вывод, что, исходя из функциональных, физиологических и технических показателей, наиболее приемлемыми в качестве стимулов являются прямоугольные импульсные сигналы, униполярные и биполярные, длительностью 0,1—0,5 мс и частотой повторения 80—200 Гц, а также синусоидальные сигналы в диапазоне частот 2—5 кГц.
Рекомендуемые для биоэлектроуправления движениями параметры прямоугольных импульсов примерно соответствуют по длительности хронаксии большинства мышц человека в норме и при некоторых видах патологии двигательной функции, а по частоте — порогу суммации одиночных сокращений в тетанус. Рекомендуемые частоты синусоидальных сигналов (2—5 кГц), безусловно, выходят за рамки лабильности, однако они обладают меньшей (по сравнению с низкочастотными синусоидальными сигналами) болезненностью при стимуляции и обеспечивают лучшие функциональные показатели. Именно на частотах 2—5 кГц пределы комфортной зоны и связанная с ними точность дозирования сигнала управления максимальны. Немалую роль в таком благоприятном воздействии синусоидальных сигналов повышенных частот, по-видимому, играет то, что на этих частотах создаются наилучшие условия для прохождения электрического тока через живую ткань. Приведенные выше результаты исследований по измерению сопротивления прохождения тока при стимуляции мышц поверхностными электродами дают основание считать, что на низких частотах большая часть энергии стимула выделяется в виде тепла, приводя к раздражению болевых рецепторов. При увеличении и уменьшении частоты стимула по сравнению с областью 2—5 кГц превалирование активной составляющей сопротивления (см. рис. 3.49 по частотным зависимостям фазового угла) приводит к увеличению порога возбудимости мышц, поскольку непосредственно на возбуждение приходится меньшая доля энергии стимула.
Рассмотрим принцип построения различных типов электростимуляторов мышц человека. Простейший одкоканальный электростимулятор (рис. 7) должен состоять из задающего генератора, устройства позволяющего изменять параметры сигнала задающего генератора амплитуду, частоту, длительность), усилителя мощности, разделительного устройства.
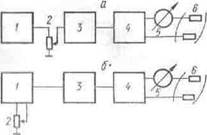
Рисунок 7 – Блок-схема электрических стимуляторов.
Задающий генератор 1 предназначен для формирования стимулирующего сигнала определенной формы и частоты. С помощью регулируемого элемента 2 (в данном случае это -может быть переменное сопротивление) сигнал с задающего генератора изменяется по амплитуде (рис. 7, а). Если же уровень воздействия регулируется изменением длительности импульсов или частоты их повторения, то блок-схема такого стимулятора имеет вид, представленный на рис. 7, б.
Усилитель мощности 3 (рис. 7 а, б) предназначен для обеспечения необходимой мощности сигнала, поступающего на выход стимулятора. Усиленный сигнал стимуляции с выхода усилителя мощности через блок разделения 4 подается на стимулирующие электроды 6. Блок разделения 4 осуществляет гальваническую развязку стимулирующих электродов и пациента от поражения электрическим током сети в случае короткого замыкания цепи питания на корпус стимулятора. В качестве блока разделения чаще всего используется трансформатор. При отсутствии гальванической развязки должна быть предусмотрена защита, которая автоматически отключала бы стимулирующие электроды от выхода стимулятора в случае пробоя сетевой обмотки силового трансформатора на корпус стимулятора.
Следует помнить, что приборы, предназначенные для использования в медицинской практике, должны удовлетворять требованиям ГОСТ на электробезопасность, согласно которым изоляция между стимулирующими электродами и корпусом стимулятора должна выдерживать напряжение 4 кВ. Использование в усилителе выходного трансформатора дает возможность обеспечить выполнение этого требования. Одновременно наличие выходного трансформатора обеспечивает разрыв гальванической связи стимулирующих электродов с источником питания, что очень существенно, так как пропитанные физиологическим раствором чехлы электродов обеспечивают надежный контакт с кожей и при случайном прикосновении к корпусу прибора или заземленным частям оборудования ток может достигнуть значений, опасных для организма.
Сигнал с выхода стимулятора поступает на стимулирующие электроды через индикатор 5, который обычно измеряет среднее значение тока стимуляции. Индикация тока стимуляции в большинстве случаев производится с помощью стрелочного измерительного прибора. Многие перечисленные функции стимулятора могут реализоваться устройством, технически выполненным в едином узле.
Так, например, в одном узле могут быть выполнены задающий генератор, усилитель мощности, а также гальваническая развязка (рис. 8).
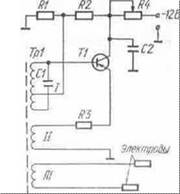
Рисунок 8 – Принципиальная электрическая схема простейшего электростимулятора мышц человека.
Функции задающего генератора, усилителя мощности и схемы разделения может выполнять достаточно простая схема автогенератора (см. рис. 8). В этом случае амплитуда стимуляции регулируется путем изменения напряжения питания по постоянному току транзистора с помощью сопротивления К.4. Гальваническая развязка выхода генератора и стимулирующих электродов осуществляется с помощью трансформатора Тр1. Этот же трансформатор используется для создания положительной обратной связи (обмотка //), необходимой для нормальной работы схемы генератора. Элементы 1,2,3 создают необходимый режим питания схемы по переменному и постоянному току.
Представленная схема может быть использована для стимуляции отдельных мелких мышц. Максимальная выходная мощность зависит от типа применяемого транзистора Т1 и величины напряжения источника питания. К недостаткам данной схемы следует отнести малую выходную мощность, некоторую зависимость частоты стимулирующего сигнала от изменения величины нагрузки, а также наличие потерь мощности источника питания на регулировочном элементе. Для устранения перечисленных недостатков стимулирующие электроды нужно подключать через дополнительный усилитель мощности (рис. 9), благодаря чему устраняется влияние изменения величины нагрузки на параметры автогенератора. В этом случае налицо четкое разграничение функций задающего генератора, собранного на транзисторе Т1, регулирующего элемента выходной мощности (КЗ), усилителя мощности (Т2, ТЗ}. Выходной трансформатор Тр2 выполняет роль гальванической развязки.
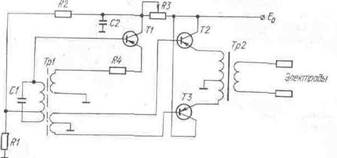
Рисунок 9 – Принципиальная электрическая схема простейшего электростимулятора с усилителем мощности.
Одноканальные стимуляторы позволяют стимулировать одну нервно-мышечную группу. Для одновременной стимуляции нескольких нервно-мышечных групп необходимо применять многоканальные стимуляторы (рис. 9). В целях упрощения блок-схемы такого стимулятора задающий генератор выполняют общим для всех каналов стимуляции. В остальном каждый канал многоканального стимулятора должен состоять из таких же функциональных узлов, как л одноканальный стимулятор, приведенный на рис. 7, а, б.
Развитие электростимуляторов привело к переходу к программным электростимуляторам. Последние позволяют стимулировать группы мышц по заранее установленной программе, возбуждая заданные мышцы в определенной временной последовательности. Необходимым элементом программных стимуляторов является задатчик программ, на выходе которого вне зависимости от конкретного схемного решения должны появляться импульсы, определяющие длительность активной фазы сокращения стимулируемой нервно-мышечной группы, а частота повторения должна равняться частоте сокращения стимулируемой мышцы.
Блок-схема простейшего задатчика программ электростимулятора представлена на рис. 10. Он состоит из ждущих мультивибраторов М1, М2, МЗ, М4 и переключателей. Каждый из выходов мультимцпраторов с помощью переключателей П2, ПЗ, П4, П5 подключаемых к запускающему входу того или иного ждущего мультивибратора зависимости от очередности включения. Переключатель П1 выбирает номер канала, с которого должна начинаться программа управления. Переключатели П6,П7,П8,П9 задают длительность активной фазы сокращения. Представленная на рис. 10 схема является простейшей. В ней не предусмотрена возможность регулировки передних и задних фронтов импульсов активной фазы. Многоканальный программный электростимулятор позволяет создавать модель пространственно-временных соотношений работы нервно-мышечных групп, участвующих в реализации определенных двигательных актов живого организма.
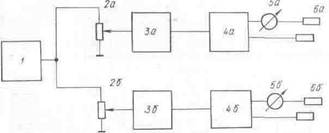
Рисунок 10 – Блок-схема двухканального электростимулятора.
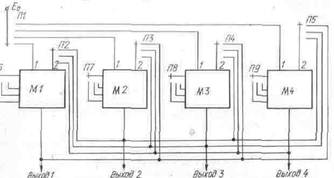
Рисунок 11 – Структурная схема простейшего задатчика программ электростимуляции.
В организме пространственно-временные соотношения работы отдельных нервно-мышечных групп при движении конечности выражаются функционалом, зависящим от многих функций с многими переменными. Поэтому искусственно синтезировать пространственно-временные соотношения участия различных нервно-мышечных групп в выполнении движения можно лишь весьма приблизительно. В этом отношении биоунравляемые электростимуляторы пропорционального типа, к которым относится и устройство «Миотон», обладают явными преимуществами по сравнению с электростимуляторами, в которых программа управления синтезируется искусственно в задатчике программ. В устройстве «Миотон» программой управления являются но существу те реальные пространственно-временные соотношения биоэлектрических активностей «донорных» мышц, которые участвуют в выполнении движения. Поэтому неотъемлемыми элементами блок-схемы брюуправляемых электростимуляторов является датчик / электрической активности «донорных» мышц и блок 2 выделения из этой активности информации о характеристиках сокращения донорных мышц (рис. 12). Датчик электрической активности «донорных» мышц может быть выполнен в виде электродов, подсоединенных к управляющим мышцам и подключенных к усилителю биопотенциалов, или в виде запоминающего устройства, например, магнитного регистратора биоэлектрической активности «донорных» мышц. Далее программный сигнал с помощью модулятора 3 управляет одним или несколькими параметрами стимулирующего сигнала, поступающего с генератора 4. Последний, как и в случае беспрограммных стимуляторов, поступает последовательно на предварительный усилитель 5, усилитель 6 мощности и стимулирующие электроды 7.
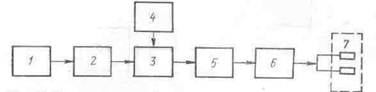
Рисунок 12 – Блок-схема одноканального биоэлектростимулятора.
ЛИТЕРАТУРА
1. Системы комплексной электромагнитотерапии: Учебное пособие для вузов/ Под ред А.М. Беркутова, В.И.Жулева, Г.А. Кураева, Е.М. Прошина. – М.: Лаборатория Базовых знаний, 2000г. – 376с.
2. Электронная аппаратура для стимуляции органов и тканей /Под ред Р.И.Утямышева и М.Враны - М.: Энергоатомиздат, 2003.384с..
3. Ливенсон А.Р. Электромедицинская аппаратура. :[Учебн. пособие] - Мн.: Медицина, 2001. - 344с.
4. Катона З. Электроника в медицине: Пер. с венг. / Под ред. Н.К.Розмахина - Мн.: Медицина 2002. - 140с.
0 комментариев