Министерство образования РФ
Тульский Институт Экономики и Информатики
Кафедра информационных технологий
Контрольная работа
По дисциплине «Теория систем и системный анализ»
По теме «Моделирование линейных систем»
Выполнил: студентка 1-го курса
Специальности ПИвЭ05
Андрианова К.Г.
Проверил:
Токарев В.Л.
Тула 2006
Введение
Целью системного анализа является моделирование системы.
Существуют два способа моделирование системы:
-аналитический;
-имитационный.
Аналитический способ применяется тогда, когда закономерности процессов, протекающих в системе, известны.
Имитационный способ применяется тогда, когда такие закономерности не известны, но в процессе функционирования системы, может быть накоплена выборка данных, содержащих информацию о поведении системы.
В контрольной работе решается задача построения имитационной модели статической линейной системы, имеющей три входа и один выход. Предполагается, что на систему действуют случайные возмущения, результатом которых являются случайные составляющие с нормальным разделением.
Построение математической модели системы
В контрольной работе решается задача построения имитационной модели статической решеткой системы, имеющей 3 входа и 1 выход.
Предполагается, что на систему действует случайное вращение, результатом которого является случайное составление с нормальным распределением.
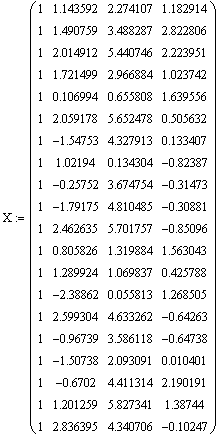
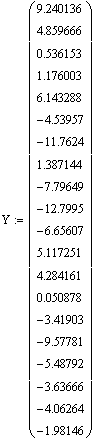
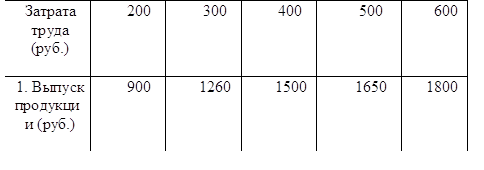
Формирование матриц Х и Y по исходным данным (обучающая выборка – первые 20 строк матрицы):
Найдем вектор исходных параметров:
1) Транспонируем матрицу Х.

2)
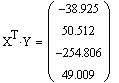
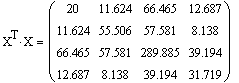
3)

Получаем вектор исходных параметров:
![]()

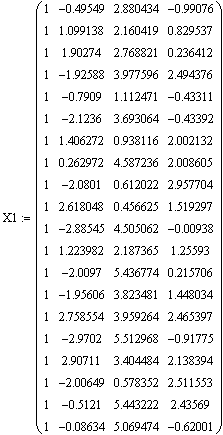
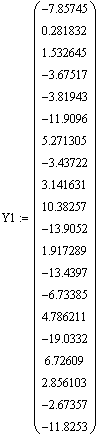
Сформируем матрицы X1 и Y1, полученные из контрольной выборки (следующие 20 чисел):
Для оценки случайности значений временного ряда ошибки необходимо сформировать матрицу Е по контрольной выборке.
Для того, чтобы сформировать матрицу Е нужно:
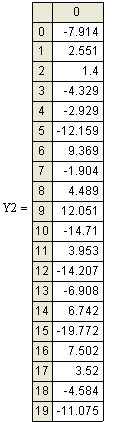
- найти скалярную величину У2(матрицу Х1 умножить на вектор случайных параметров Р) ![]()
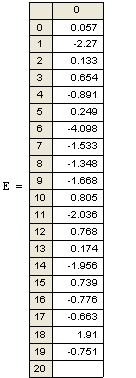
- найдем саму матрицу по формуле: ![]()
Получим:
Сравним значения в матрице Е (значение сравнивается с предыдущим):
![]()
Длина серий получилась равно двум (![]() ).
).
Число серий получилось равное двенадцати(![]() ).
).
По формуле должно быть: n > n1 и τ <τ1
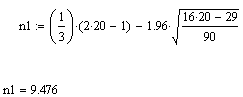
Найдем n1 по формуле:
Найдем τ1 по формуле:
![]()
Получаем: 15 > 9.476 и 2 < 7.593
Следовательно: n > n1 и τ <τ1 – верно.
Гипотеза об адекватности не отвергается.
Для оценки взаимной зависимости значений ременного ряда, необходимо найти d. Чтобы его найти нужно выполнить следующие действия:
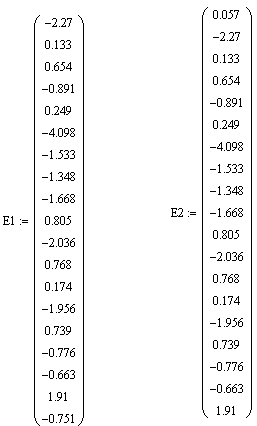
- сформировать матрицы Е1 и Е2
Для того, чтобы получить матрицу Е1 нужно скопировать значения из матрицы Е с 1 по 19; для получения матрицы Е2 мы скопируем значения из матрицы Е, начиная с 0 и заканчивая 18 значением, при этом получим:
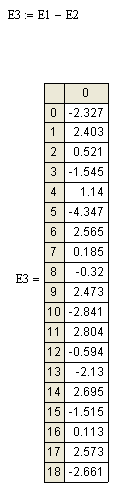
Затем по формуле найдем матрицу Е3:
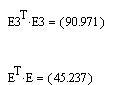
Теперь транспонируем Е3, получим:
![]()
Транспонируем матрицу Е, получим:
![]()
Затем по формулам находим d:

d=0..2, этом говорит о том, что имеется отрицательная взаимозависимость между ошибками. Гипотеза об адекватности модели не отвергается.
Проверка распределения случайной величины Е на нормальность заключается в оценке двух статистик: асимметрии и эксцесса.
Для того, чтобы найти асимметрию необходимо знать S, она является среднеквадратичной. Среднеквадратичная вычисляется по формуле:
![]()
Из этой формулы нам известно Е4.Для того, чтобы найти выполним следующие действия:
![]()
![]()
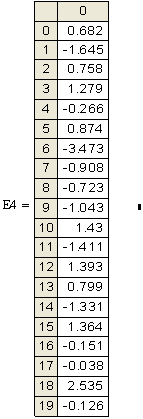
Теперь транспонируем полученную матрицу Е4, получим:
![]()
Теперь мы можем найти S:
![]()
![]()
Мы нашли S, теперь можем найти асимметрию (А), подставив Е4 в формулу:
![]()
Далее находим эксцесс по формуле, подставляя S. Эксцесс обозначим буквой В.
Получим:
![]()
Чем ближе эксцесс к 0, то считается это нормально.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Если выполняется следующее условие ![]()
![]()
То гипотеза об адекватности не отвергается. Следовательно, гипотеза, об адекватности модели отвергается.
Заключение
В контрольной работе решалась задача построения имитационной модели статической системы, имеющей 3 входа и 1 выход.
Предполагалось, что на систему действует случайное возмещение, результатом которого является случайное составление с нормальным распределением.
В контрольной работе производилась проверка адекватности модели системы. Проверка состояла из трёх этапов:
1. Оценки случайности значений временного ряда ошибки (здесь были выполнены оба неравенства n > n1 и τ <τ1 – это означает, что гипотеза об адекватности не отвергается).
2. Оценка взаимной зависимости значений временного ряда (d=0..2(2.011) - -это означает, что имеется отрицательная взаимозависимость между ошибками).
3. Проверка распределения случайной величины на нормальность (условие, при котором гипотеза об адекватности не отвергается, не выполняется).
Похожие работы
... ресурсу про x1=10, х2=25. 7. Функции спроса и предложения на товар имеют вид: d(p) = - 0,3p + 60 и S(p) = 9,7p+10, соответственно. Зав. кафедрой -------------------------------------------------- Экзаменационный билет по предмету МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЭКОНОМИЧЕСКИХ СИСТЕМ Билет № 2 1. В чем состоит связь целевых функций прямой и двойственной задач и что это значит ...
... и 25 ед. полезности. Товары приобретаются по ценам 50 у.е. и 70 у.е., бюджет потребителя составляет 2000 у.е. Сформулировать задачу потребителя. Зав. кафедрой -------------------------------------------------- Экзаменационный билет по предмету МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЭКОНОМИЧЕСКИХ СИСТЕМ Билет № 11 Рассматривается задача составления плана производства как Задача линейного ...
... ед. и 25 ед. полезности. Товары приобретаются по ценам 50 у.е. и 70 у.е., бюджет потребителя составляет 2000 у.е. Сформулировать задачу потребителя. Зав. кафедрой -------------------------------------------------- Экзаменационный билет по предмету МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЭКОНОМИЧЕСКИХ СИСТЕМ Билет № 11 1) Рассматривается задача составления плана производства как Задача ...
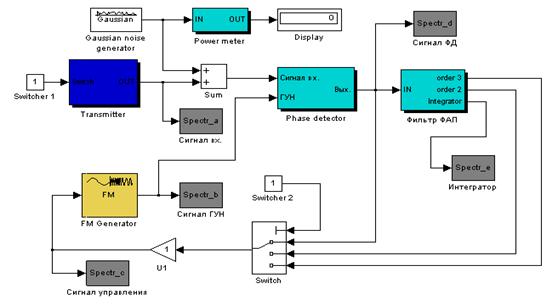
... = arcsin (Δfн/ SуE). Для систем ФАП большего порядка полосы удержания и захвата не равны друг другу. Элементы теории систем фазового регулирования. Система фазовой автоподстройки частоты Система фазовой автоподстройки частоты состоит из трех основных элементов: перемножителя, инвариантного во времени линейного фильтра и управляемого генератора, рис. П.2.1. Представим входной сигнал ...
0 комментариев