Самоходное горное оборудование на пневмоколесном ходу
Самоходное горное оборудование (СГО) на пневмоколесном ходу – важнейший сегмент оборудования, применяемого во многих отраслях современной горно-добывающей промышленности. Появившись сравнительно недавно, всего несколько десятилетий назад, он в значительной степени изменил технологию работ, сделав ее более производительной, безопасной, экономически эффективной. На примере погрузочно-доставочных машин (ПДМ), подземных самосвалов, специального транспорта особенно ярко проявляется влияние технического прогресса на горное машиностроение.
Самоходное горное оборудование на пневмоколесном ходу сегодня настолько привычно, что уже трудно поверить в то, что его история насчитывает всего лишь около полувека.
“Переход с традиционной технологии ведения горных работ со скреперной доставкой горной массы на технологию с самоходным оборудованием проходил непросто, так как техника эта для горняков была незнакомой, квалифицированных кадров не было, находилось место и неверию, и сомнениям.
За рубежом на подземных работах самоходное горное оборудование (СГО) на пневмоколесном ходу (погрузочно-доставочные машины (ПДМ), подземные самосвалы, буровые установки, вспомогательные машины) используется с 50-х годов XX столетия. В нашу страну эти машины пришли с опозданием примерно на десять лет. Первопроходцами были Джезказганский ГОК и Ачисайский полиметаллический комбинат, которые и стали полигонами, настоящей всесоюзной школой освоения самоходного оборудования. На территории Российской Федерации СГО впервые начало применяться (примерно с 1965 года) на подземных рудниках Норильского горно-металлургического комбината (ныне ОАО «ГМК «Норильский Никель»). Вначале это были погрузочно-транспортные машины с ковшом и кузовом, оснащенные пневмоприводом («Т4Ж», «Каво 510», «МПДН» и др.), затем появились самоходные буровые установки («СБУ-2М», «СБУ-2К», «Бумер-121», «Бумер-131» и др.), вспомогательные машины для доставки грузов («Флекситрак», «Джой-Скаут»). Со временем дизельный привод практически полностью вытеснил пневматический. Сегодня, спустя тридцать лет, на рудниках Норильска сосредоточен один из крупнейших (если не самый крупный) в России парков подземной самоходной горной техники, включающий современные мощные гидрофицированные ПДМ, автосамосвалы, буровые установки, специализированные вспомогательные машины.
Какое место занимает СГО среди других видов подземного транспорта. Можно ли говорить о его технологической конкуренции с локомотивной или конвейерной откаткой, и если да, то кто выигрывает, в ретроспективе нескольких последних десятилетий?
При оценке эффективности применения того или иного вида транспорта следует исходить из вида полезного ископаемого (уголь или руда), а также способа добычи. Нельзя сказать, какой из этих видов лучше в принципе, можно лишь говорить о том, какой лучше подходит для конкретной шахты с конкретным способом добычи и откатки ископаемых. В угольных шахтах, как правило, используется транспорт на рельсовом ходу, а в шахтах, где добывают руду, все большее распространение получает пневмоколесный.
Если говорить о доставке горной массы в процессе очистных работ на горизонтах подсечки или из проходческих забоев, где расстояние доставки меняется по мере подвигания забоя и тяжелые дорожные условия (почва выработок неровная, как правило, покрыта породной или рудной мелочью, наличие уклонов и т. д), то конкурентов у пневмоколесного самоходного подземного оборудования нет. На транспортных же горизонтах (откаточных выработках) рельсовый транспорт становится более приемлемым и рентабельным. На ряде рудников (например, калийных Верхнекамского месторождения) широкое применение получил конвейерный транспорт.
Применение самоходного пневмоколесного транспорта в добыче полезных ископаемых подземным способом является всего лишь одним из вариантов существующих технологий. Применение данной технологии зависит от многих факторов. Ее основное преимущество заключается в мобильности. Отсюда и существующая конкуренция. Самоходный пневмоколесный транспорт позволяет в сжатые сроки начать эксплуатацию шахты и добычу руды. Особенно эффективно применение данной технологии в рудниках с небольшими запасами руды. Ее использование позволяет реагировать на ситуацию на рынке путем регулирования себестоимости добычи. Ресурс рельсового транспорта во много раз превышает ресурс самоходной техники. Поэтому он эффективен в рудниках, где запасов руды хватит на многие десятилетия.
Какие же объективные факторы способствуют увеличению интереса к ПДМ, подземным погрузчикам и подземным самосвалам со стороны горно-добывающих организаций, а какие, напротив, его снижают?
Во-первых, с помощью этих машин удается подвести непосредственно к забою значительную мощность, которая затем «конвертируется» и в большую грузоподъемность и, следовательно, в высокую производительность погрузочно-транспортных машин.
Во-вторых, самоходному транспорту на пневмоколесном ходу присущи высокая проходимость, маневренность и мобильность. Не привязанный ни к рельсам, ни к канатам (как скреперные лебедки) он обладает по сути дела неограниченной свободой действий и, по мере необходимости, может легко перебрасываться с одного участка на другой.
В-третьих – универсальность – способность выполнять большой не только по объему, но и по разнообразию решаемых задач, круг работ. Основная «обязанность» ПДМ – грузить и транспортировать руду и породу, но они также перевозят материалы, оборудование, элементы крепи, могут выступить в роли тягача и т. д.
Отметив достоинства дизельного самоходного пневмоколесного транспорта, необходимо также сказать и о проблемах, сопровождающих его эксплуатацию. Самая острая из них – необходимость очистки выхлопных газов. Решается она двумя путями – сжиганием топлива в разделенных камерах сгорания цилиндров и применением каталитического и жидкостного нейтрализаторов, снижающих содержание вредных для здоровья человека компонентов выхлопных газов дизельных двигателей. Но, несмотря на такую очистку, в выработки необходимо подавать дополнительное количество свежего воздуха для разжижения вредных компонентов в рудничном воздухе до допустимой концентрации.
Еще один недостаток самоходного транспорта – пожароопасность, а значит, необходимость наличия эффективной автоматической системы пожаротушения. Определенную опасность в этом плане представляют не только сами дизельные машины, но и подземные склады ГСМ и заправочные станции. Вообще, организация под землей такого хозяйства требует решения ряда весьма сложных технических задач, в частности, доставки под землю в больших количествах дизельного топлива и ГСМ.
Существуют ли субъективные факторы (традиции, какие-то устоявшиеся заблуждения и т.д.), препятствующие возрастанию роли ПДМ и подземных самосвалов?
В XXI веке едва ли приходится говорить о традициях, только прагматизм и экономическая эффективность являются определяющими факторами в выборе технологий.
Выбор оборудования в первую очередь определяется не традициями, а принятыми системами разработки. Так, например, на «негазовых» Джезказганских рудниках камерно-столбовая система позволяет осуществлять непосредственно в забоях погрузку горной массы экскаваторами в крупнотоннажные автосамосвалы, тягачи с прицепами, самоходные вагоны и другие транспортные средства, которые с относительно высокой скоростью по горизонтальным трассам транспортируют ее к местам разгрузки. В то же время при отработке маломощных залежей на норильских рудниках требуется «низкопрофильное» самоходное оборудование высотой менее 1,7 м, а условия их эксплуатации характеризуются наличием значительных уклонов, газовым режимом, стесненностью горных выработок, высокой абразивностью пород и т. п.
Особенности эксплуатации СГО в РоссииЕсли сравнивать Россию и СНГ, с одной стороны, и другие страны, ведущие горно-добывающие работы в больших объемах, – с другой, можно ли говорить о каких-то различиях в подходах к использованию ПДМ и подземных самосвалов: различается ли «удельный вес» этого вида подземного транспорта в общем объеме откатки, существуют ли какие-то принципиальные различия в организации работ?
В России пока парк СГО формируется главным образом за счет импорта. По каким параметрам отечественные машины проигрывают зарубежным? А, может быть, отставание российской и стран СНГ продукции в этом сегменте это миф и никакого отставания нет и в помине?
“Отечественная продукция не отстает – ее просто нет в том виде, чтобы можно было говорить о какой-то конкуренции с импортом.
На территории СНГ шахтные самосвалы производит один завод, а ПДМ – два завода. Выпускаемые ими машины конструктивно устарели, да и качество сборки оставляет желать лучшего. Их главный козырь – дешевизна. Начиная с 1995 года многие частные предприятия пытались освоить производство данной техники, но на сегодняшний день мне известно только два, не свернувшие эти проекты. Одно из таких предприятий наше.
Отечественная продукция не отстает – ее просто нет в том виде, чтобы можно было говорить о какой-то конкуренции с импортом. Тем не менее, испытания наших машин показали, что МПД-4 – это первая конкурентоспособная ПДМ, спроектированная и изготовленная на территории СНГ. Это оценили и конкуренты. Но чтобы занять достойное место в одном ряду с ведущими мировыми производителями, еще необходимо много работать.
Почему в России пока не получается сделать подземный погрузчик, погрузочно-доставочную машину или подземный самосвал мирового уровня? Вопрос почти риторический, аналогичный тому, «почему продукция российского «автопрома» уступает лучшим зарубежным образцам?». Да, в России хорошие инженеры и конструкторы – точно уж ни в чем не уступающие западным. Видимо, что-то не «срабатывает» на уровне организации. А потом нужны достаточно большие финансовые вложения, которые далеко не сразу принесут отдачу. Кто готов пойти на эти вложения?
Главное, в чем российское оборудование проигрывает лучшему зарубежному, – это надежность. Если сравнивать другие параметры – производительность, экономичность, условия работы оператора, то здесь превосходство импортных машин тоже налицо. Но самое важное – это все-таки низкая надежность, особенно нетерпимая в подземных условиях.
Сегодня отечественных машин на рудниках очень и очень мало не только среди ПДМ и подземных самосвалов, но и другой техники, буровой, например. Наши машины просто не выдержали конкуренции. Был период, когда их достаточно активно разрабатывали, выпускали опытные образцы. Но большинство этих образцов так и не сумело превратиться в востребованную серийную машину.
Существуют ли какие-то «специфические» проблемы, связанные с безопасностью эксплуатации ПДМ и подземных самосвалов; как они решаются?
Поскольку труд горняка становится потенциально все более опасным из-за ухудшающихся горно-геологических условий, машина должна оберегать оператора от проблем, с этим связанных. Обязательно должен быть обеспечен высокий комфорт (звукоизоляция, очистка воздуха, температура). Причем комфорт не как самоцель, а как фактор, способствующий как более высокой производительности, так и внимательности оператора, в конечном счете, влияющей на ту же безопасность. Безопасность оператора – это и максимальный обзор, и надежная кабина. Например: кабина и сверху, и сбоку выдерживает удар до 10 т.
Технический прогресс – основные направленияВ каком направлении движется технический прогресс в области создания СГО? Есть ли еще (и если есть, то какой и в чем) ресурс для совершенствования ПДМ и подземных самосвалов? Какими были эти машины 30–20–10 лет назад, какими должны стать в ближайшем и отдаленном будущем?
За новыми идеями и конструктивными решениями идет настоящая гонка.
Возможности для совершенствования подземной техники будут всегда. В первую очередь это касается системы привода – двигателей, КПП, мостов, а также электроники. Например, почти все машины PAUS могут по желанию заказчика комплектоваться дистанционным управлением основных функций машины или видеокамерами.
С того момента, когда был произведен первый в мире подземный погрузчик (а придуман и сделан он был компанией Wagner Mining Scoop co., с 1989 входящей в состав Atlas Copco и ныне носящей название Atlas Copco Rock Drills AB), минула целая эпоха – появились материалы с принципиально новыми свойствами, совершенные электроника и автоматика. И все эти достижения научно-технической революции, помноженные на изменения в мышлении людей, а оно стало более экологичным, социально ориентированным.
В конце 40-х – начале 50-х братья Вагнеры Эдди и Элмер изобрели первую полноприводную машину с сочлененной рамой и дизельным приводом. В какой-то степени она послужила плацдармом для дальнейших разработок. И в 1958 году был создан первый погрузчик для подземных работ на пневмоколесном ходу, а двумя годами позже, в 1960-м, представлен первый полноприводной самосвал для подземных работ MT-10. Уже через год появляется шахтный самосвал с оснащенным выталкивателем кузовом Teletram. В 1963 окончательно определяется концепция ПДМ (Scooptram ST-5)
Сегодня новые модели оборудования полностью компьютеризированы. (Пример такой самой современной машины – погрузчик следующего года ST14). Компьютеризация, автоматизация, насыщение электроникой – это не дань моде, а насущная необходимость. Если раньше стояла задача избавить человека от тяжелого физического труда, то компьютер существенно облегчил и сделал на порядок более эффективным процесс принятия решений. С его помощью подбирается оптимальный с точки зрения производительности, экономичности и безопасности режим работы машины (причем неважно, какой машины – бурового станка, подземного погрузчика или самосвала). Он одновременно отслеживает и обрабатывает огромный массив информации (расход топлива, состояние основных узлов машины, горно-геологические условия, расстояния и т.д.), – человеку (оператору) остается главным образом функция контроля.
Перспективы развития самоходного подземного транспорта на пневмоколесном ходу просматриваются очень ясно. В первую очередь, это максимально возможная автоматизация операций. Действительно, автоматика должна взять на себя значительную часть функций, которые сегодня выполняет оператор. Сведение к минимуму влияния «человеческого фактора» – недостатка квалификации, опыта, быстроты реакции, настроения, наконец, позволит в полной мере использовать заложенный в оборудование потенциал.
Для того чтобы координировать работу все более усложняющейся автоматики; чтобы обеспечивать контакт машины и человека, и машина, несмотря на «делегирование» ей все большего числа функций, оставалась послушной и легко управляемой, нужна компьютеризация. Кроме того, компьютер позволяет осуществлять контроль состояния узлов машины, проводить их быструю диагностику. Образно говоря – постоянно «держать руку на пульсе». Четкий учет ресурса позволяет регулировать объем запчастей на складах, исключать непредвиденные остановки производства из-за неожиданного выхода оборудования из строя. Те, кто, ради сиюминутной экономии или желая упростить себе жизнь, сняв с себя заботы об обслуживании автоматики и компьютеров, отказываются от них, – совершают большую ошибку. Отступать в дремучесть никак нельзя.
В более далекой перспективе во все больших масштабах должно использоваться дистанционное управление. Это на самом деле не фантазия, а самая что ни на есть острая необходимость. И чем дальше, тем больше. Связано это с тем, что горно-геологические условия постоянно усложняются – все беднее становятся руды, и самое главное – более опасными условия труда горняков. Чтобы свести эту опасность к минимуму, и необходимо дистанционное управление, которое избавит человека от необходимости постоянного пребывания в особо опасных зонах. Причем возможно не только дистанционное управление из-под земли, но и с поверхности. Уже сейчас, например, при разработке железорудных месторождений в шведской Кируне подобные технологии используются в той или иной степени.
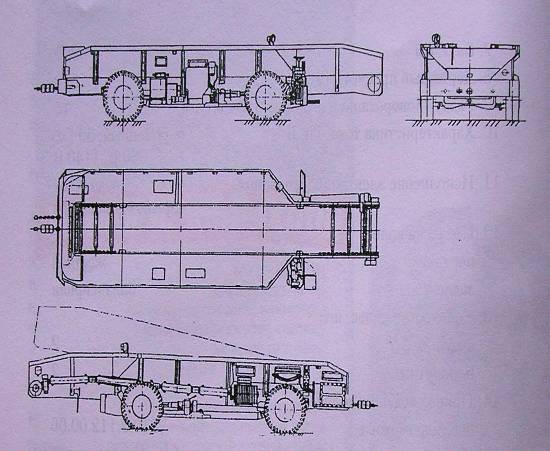
На рудниках, где имеются проблемы при доставке, или необходимость выхода в открытое очистное пространство, для большей безопасности используют дистанционное управление на доставке. Это успешно освоено на руднике Фриипорт (Индонезия), где часты грязевые прорывы, руднике Нортспаркс (Австралия), руднике Финч (ЮАР), (рис.3,4). Пункт дистанционного управления может быть расположен на транспортном горизонте, на поверхности рудника, и в принципе на любом удалении от места производства горных работ. Здесь открываются интересные перспективы создания высокопроизводительного дистанционно управляемого либо автоматизированного подземного рудника. При дистанционном управлении погрузкой горной массы появляется реальная возможность применения низкозатратных систем разработки с самообрушением руды на большинстве мощных месторождений, отрабатываемых в настоящее время с помощью более дорогих методов подземной добычи.
“Поскольку труд горняка становится потенциально все более опасным из-за ухудшающихся горно-геологических условий, машина должна оберегать оператора от проблем, с этим связанных.
“Безопасность – это, может быть, самый важный фактор, принимаемый во внимание при проектировании новой машины.
Еще одно важное направление технического прогресса – специализация. Как пример, оборудование для низких выработок. Низкопрофильные машины позволяют отрабатывать пласты малой мощности, эффективно работать в стесненных условиях.
И обязательно – повышение надежности машины. Надежность в данном случае подразумевает безотказность, ремонтопригодность, долговечность.
Важно, чтобы «росли» не только производители, но и те, кто их технику эксплуатируют. Чем выше технический уровень машины, тем более высокой культуры эксплуатации она требует. Ремонтные участки самоходного оборудования должны быть оснащены приборами для диагностики, иметь склады с неснижаемым запасом запчастей, необходимо поддерживать на должном уровне состояние дорог (от них во многом зависят надежность оборудования и скорость, а значит, производительность).
Более эффективными становятся системы контроля, благодаря применению автоматики и электроники.
В ноябре 2004 года в Вашингтоне был подписан Меморандум о взаимопонимании между Геологической службой США и МГГУ относительно научно-технического сотрудничества в области наук о земле, и на его основе была составлена и утверждена обеими сторонами Программа совместных научных исследований. В одном из разделов Программы предусматривается интенсификация внедрения в горное производство безопасных и экологически чистых технологий на базе наиболее совершенной современной техники.
Во всех ведущих горнодобывающих странах, в области подземной разработки рудных месторождений приоритетным направлением развития эффективных технологий при отработке мощных залежей считается переход на добычу руды системами разработки с самообрушением руды. Это одна из наиболее механизированных и высокопроизводительных систем разработки, позволяющая развивать годовую производительность до нескольких миллионов тонн руды.
Обеспечение высокой производительности при отработке очистных блоков стало возможным благодаря появлению мощной самоходной техники на выпуске, доставке и транспорте горной массы. Длительное время сдерживающим фактором широкого внедрения мощных самоходных машин была сильная загазованность подземных выработок выхлопными газами от дизельных двигателей работающих машин. В качестве средств борьбы с газами пытались увеличить количество подаваемого воздуха для проветривания, однако это мера далеко не всегда ликвидирует опасные концентрации газов, имея ограничения по скорости движения воздуха в выработках, до начала пылеобразования.
Наиболее эффективным решением этой важной экологической и производственной задачи стало применение на машинах, в каналах выхлопа газов, специальных газопоглотителей, разработанных на основе исследований сложных каталитических процессов, происходящих на металлических поверхностях, покрытых платиной или платиноидами. С появлением платиноидных газонейтрализаторов, устанавливаемых на горном доставочном и транспортном оборудовании, появилась возможность обеспечить высокую концентрацию горных работ на одном или нескольких горизонтах рудника, чем существенно снизилась себестоимость очистных работ.
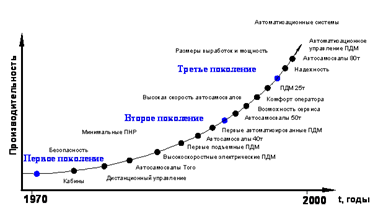
Рис. Эволюция погрузо-доставочных и транспортных машин
Любопытны этапы развития погрузо-доставочной техники (ПДМ), и в соответствии с этим открывающиеся новые возможности ее эффективного использования. За несколько десятилетий произошли большие изменения в конструкциях ПДМ: увеличились объем ковша, грузоподъемность, изменились габариты: ковш стал шире, а высота машины – меньше. На рисунках 1,2 приведены этапы эволюции ПДМ за последние 30 лет и одна из последних моделей ПДМ с увеличенными размерами ковша.
При погрузке рудной массы мощные ПДМ, внедряясь в навал руды и приподнимая ковш, производят встряхивание выпускаемого рудного столба, полностью ликвидируя этим какие-либо зависания или смерзания кусков руды в северных условиях, вызывая перетирание кусков в соседних пунктах выпуска. При этом существенно снижается опасность куполообразования, зависания и заклинивания кусков руды в выпускных воронках.
На рудниках, где имеются проблемы при доставке, или необходимость выхода в открытое очистное пространство, для большей безопасности используют дистанционное управление на доставке. Это успешно освоено на руднике Фриипорт (Индонезия), где часты грязевые прорывы, руднике Нортспаркс (Австралия), руднике Финч (ЮАР). Пункт дистанционного управления может быть расположен на транспортном горизонте, на поверхности рудника, и в принципе на любом удалении от места производства горных работ. Здесь открываются интересные перспективы создания высокопроизводительного дистанционно управляемого либо автоматизированного подземного рудника. При дистанционном управлении погрузкой горной массы появляется реальная возможность применения низкозатратных систем разработки с самообрушением руды на большинстве мощных месторождений, отрабатываемых в настоящее время с помощью более дорогих методов подземной добычи.
Современная ПДМ фирмы TORO с основными техническими параметрами, но разнообразие их модификаций сейчас очень велико.
Габаритная ширина × высота, мм: 3710×3161
Высота с поднятым кузовом, мм: 7370
Грузоподъемность, т: 24
Вместимость ковша, м3: 10
Типоразмеры и характеристики ПДМ фирмы Toro (Финляндия) приведены в таблице 1.
Таблица 1.
Погрузочно–доставочные машины фирмы TORO.
| Модель | 400 D | 400 E | 501 D | 501 DL | 501 E |
| Тип двигателя (диз./электрич.) | диз. | Электр | диз. | диз. | электр |
| Минимальная емкость ковша,.м3 | 3,8 | 3,8 | 4,3 | 4,3 | 4,3 |
| Максимальная емкость ковша,.м3 | 4,6 | 4,6 | 7,5 | 7,5 | 7,5 |
| Грузоподъемность при откатке, кг | 9600 | 9600 | 14000 | 14000 | 14000 |
| Масса без груза, кг | 22800 | 24500 | 34000 | 36700 | 36500 |
| Мощность двигателя, кВт | 158 | 110 | 204 | 242 | 160 |
| Длина, мм | 9363 | 9633 | 10320 | 10540 | 10680 |
| Ширина, мм | 2440 | 2440 | 2730 | 2730 | 2730 |
| Высота, мм | 2320 | 2320 | 2600 | 2850 | 2600 |
| Радиус поворота внешний, мм | 6635 | 6635 | 7230 | 7230 | 7300 |
| Радиус поворота внутренний, мм | 3550 | 3550 | 3830 | 3830 | 3880 |
| Угол разворота рамы, градусы | 40 | 40 | 38 | 38 | 38 |
| Макс. высота шарнира ковша, мм | 3389 | 3389 | 4080 | 4565 | 4080 |
| Макс. высота разгрузки ковша, мм | 1700 | 1700 | 2390 | 2850 | 2440 |
| Макс. угол разгрузки, градусы | 45 | 45 | 41 | 42 | 39 |
| Время подъема ковша, сек | 7 | 8 | 8 | 7,7 | 9 |
| Время опускания ковша, сек | 4 | 4,5 | 4 | 4 | 5,5 |
| Время наклона ковша, сек | 2,5 | 3 | 2,5 | 1,6 | 3 |
| Шины (ширана x диаметр), дюймы | 18,0 x 25 | 18,0 x 25 | 26,5 x 25 | 26,5 x 25 | 26,5 x 25 |
| Длина кабеля, м | - | 230 | - | - | 280 |
| Скорость движения с грузом: | |||||
| 1-ая передача (вперед и назад) | 5,1 | 3,5 | 4,8 | 5,4 | 3,5 |
| 2-ая передача (вперед и назад) | 10,3 | 6,8 | 8,4 | 9,2 | 6,1 |
| 3-ья передача (вперед и назад) | 17 | 12 | 14 | 15,5 | 10,5 |
| 4-ая передача (вперед и назад) | 27 | - | 23 | 25,5 | - |
Грузоподъемность различных типов машин фирмы Atlas Copco (Швеция) приводится в таблице 2.
Таблица 2.
| МОДЕЛЬ | Ширина ковша, м | Грузоподъемность, т |
| ST3.5 | 2,1 | 6.0 |
| ST600LP | 2,15 | 6.0 |
| ST710 | 2,04 | 6.5 |
| ST1020 | 2,7 | 10.0 |
| ST7.5Z | 12.2 | |
| ST8B | 13.6 | |
| ST8C | 3,0 | 14.5 |
| ST1520 | 2,9 | 15.0 |
Из представленных рисунков и таблиц видно, что современные погрузо-доставочные машины в состоянии перемещать руду с крупностью куска до 6 м3. Это существенно снижает объем вторичного дробления на транспортных горизонтах, чем значительно повышается безопасность ведения горных работ. Кроме того, большие размеры ковша позволяют конструировать основания блоков с широкой горловиной выпускной воронки, и использовать плоское днище на доставке руды.
Таким образом, появляется возможность отрабатывать блоки повышенной этажности, не создавая опасности загрязнения воздуха на транспортных горизонтах. Главным преимуществом применения систем разработки с самообрушением руды и использованием дистанционно управляемой самоходной техники с платиноидными катализаторами является минимизация числа инженерно-технического и рабочего персонала на подземных горных работах, чем снижается риск производственного травматизма и повышается безопасность подземных горных работ.
Литература
1. Е.В. Кузьмин, М.М. Хайрутдинов, Д.К. Зенько. Основы горного дела. М., 2007, Изд. АртПринт, 470с.
Похожие работы
... по приведению кровли в безопасное состояние. 8. По окончании очистных работ в камере в горловине устанавливается аншлаг, запрещающий проход людей в отработанную камеру. 10. Организация проведения горных работ 10.1 Режим работы Режим работы участка – непрерывный, трехсменный. Календарный фонд рабочего времени участка 339 дней в году с учетом остановочного (11 дней) и капитального (15 дней ...
... функциональным назначением и спецификой применения такой техники. По принципу действия различают погрузчики цикличного и непрерывного действия. К первым относятся одноковшовые и вилочные погрузчики, а ко вторым - многоковшовые погрузчики. По назначению погрузочно-разгрузочные машины разделяют на погрузчики для штучных грузов - вилочные погрузчики и для сыпучих и мелкокусковых материалов - одно ...



... БИЗНЕСА” Для совершенствования своей деятельности предприятие использует зарубежный опыт, для приобретения которого, 5 сотрудников компании ежегодно проходят практику в европейских и северо-американских консалтинговых агентств. ОАО “ХЛЕБЗАВОД №6” Предприятие постоянно разрабатывает новые виды своей продукции. Самым последним разработанным видом является торт «Черепашка», удостоенный наград на ...
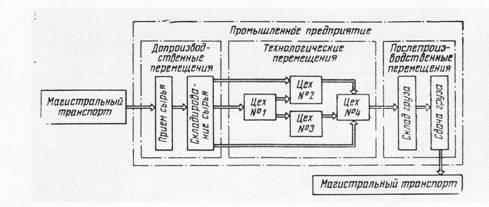
... со средой осуществляется с помощью внешнего промышленного транспорта через стыковые пункты. Следовательно, состав всей транспортной системы можно представить совокупностью трех подсистем со свойственными им конструктивными особенностями: внешнего промышленного транспорта, транспортных магистралей и пунктов их стыкования. Под пунктом стыкования понимают подсистему транспорта как комплекс ...
0 комментариев