Министерство образования и науки РФ
Томский Политехнический Техникум
Электроснабжение и электрооборудование
электромеханического цеха металлургического завода.
Пояснительная записка
КП.1806.00.00.ПЗ
Студент группы 42
_________
«___» ________ 2006
Руководитель КП
_______ Г .А.Иванова
«___» ________ 2006
Томск 2006
Содержание:
Введение: 3
I. Общая характеристика проектируемого цеха. 5
II. Расчет электроосвещения. 6
III. Расчет вентиляционной установки для цеха. 11
IV. Расчет грузоподъемного механизма. 15
V. Разработка схемы управления мостового крана. 18
VI. Характеристика мостового крана. 21
VII. Расчет и выбор электродвигателя. 22
VIII. Расчет и построение естественной механической характеристики. 29
IX Расчет и построение графиков переходного процесса при пуске электродвигателя 34
Х Разработка электрической принципиальной схемы управления и выбор аппаратуры управления, защиты электропривода механизма подъема мостового крана. 38
ХI. Охрана труда и защита окружающей среды.. 43
Литература: 45
Введение:
Первое место по количеству потребляемой электроэнергии принадлежит промышленности, на долю которого приходится более 60% вырабатываемой в стране энергии. С помощью электрической энергии приводятся в движение миллионы станков и механизмов, освещение помещений, осуществляется автоматическое управление технологическими процессами и др. Существуют технологии, где электроэнергия является единственным энергоносителем.
В связи с ускорением научно-технологического прогресса потребление электроэнергии в промышленности значительно увеличилось благодаря созданию гибких автоматизированных производств.
Энергетической программой предусмотрено создание мощных территориально-производственных комплексов (ТПК) в тех регионах, где сосредоточены крупные запасы минеральных и водных ресурсов. Такие комплекс добывают, перерабатывают, транспортируют энергоресурсы, используя в своей деятельности различные электроустановки по производству, передаче и распределению электрической и тепловой энергии.
Энергетической программой России предусматривается дальнейшее развитие энергосберегающей политики. Экономия энергетических ресурсов должна осуществляться путем перехода на энергосберегающие технологии производства; совершенствования энергетического оборудования; реконструкции устаревшего оборудования; сокращения всех видов энергетических потерь и повышения уровня использования вторичных ресурсов; улучшения структуры производства, преобразования и использования энергетических ресурсов.
Современная энергетика характеризуется нарастающей централизацией производства и распределения электроэнергии. Энергетические системы образуют несколько крупных энергообъединений.
Объединение региональных ОЭС в более мощную систему образовало Единую энергетическую систему (ЕЭС) Российской Федерации. ЕЭС позволило снизить необходимую генераторную мощность по сравнению с изолированно работающими электростанциями и осуществлять более оперативное управление перетоками энергетических мощностей с Востока, где находиться около 80% топливных и гидроресурсов, на Запад страны, так как в европейской части страны размещается 80% всех потребителей энергии. Для электрической связи между ОЭС служат сверхдальние линии электропередач напряжением 330; 500; 750 и 1150 кВ и выше.
Энергетическая политика РФ предусматривает дальнейшее развитие энергосберегающей программы. Экономия энергетических ресурсов должна осуществляться путем: перехода на энергосберегающие технологии производства; совершенствование энергетического оборудования, реконструкция устаревшего оборудования; сокращение всех видов энергетических потерь и повышение уровня использования вторичных энергетических ресурсов. Предусматривается также замещение органического топлива другими энергоносителями, в первую очередь ядерной и гидравлической энергией.
В настоящее время основой межсистемных энергетических связей России являются линии напряжением 500кВ. Введены в эксплуатацию линии напряжением 750кВ, построена линия переменного тока Итат - Кузбасс, напряжением 1150кВ, которая проложена до Урала. Начато строительство линии постоянного тока Экибастуз - Центр напряжением 1500кВ протяженностью 2400км.
Перед энергетикой в ближайшем будущем стоит задача всемерного развития и использования возобновляемых источников энергии: солнечной, геотермальной, ветровой, приливной и др.; развития комбинированного производства электроэнергии и теплоты для централизованного теплоснабжения промышленных городов.
I. Общая характеристика проектируемого цеха.
Цеховые сети промышленных предприятий выполняют на напряжение до 1 кВ (наиболее распространенным является напряжение 380 В). На выбор схемы и конструктивное исполнение цехов сетей оказывают влияние такие факторы, как степень ответственности приемников электроэнергии, режимы их работы и размещении по территории цеха, номинальные токи и напряжения.
Электромеханический цех (ЭМЦ) предназначен для подготовки заготовок из металла для электрических машин с последующей их обработкой различными способами.
Он является одним из цехов металлургического завода, выплавляющего и обрабатывающего металл. ЭМЦ имеет станочное отделение, в котором установлено штатное оборудована: слиткообдирочные, токарные, фрезерные, строгальные, анодно-механические станки и др.
В цехе предусмотрены помещения для цеховой ТП, вентиляторной, инструментальной, для бытовых нужд и пр. ЭМЦ получает ЭСН от подстанции глубокого ввода (ПГВ). Расстояние от ПГВ до цеховой ТП — 0,5 км, а от ЭНС до ПГВ — 10 км. Напряжение на ПГВ — 10 кВ.
Количество рабочих смен — 2. Потребители ЭЭ цеха имеют 2 и 3 категорию надежности ЭСН.
Грунт в районе ЭМЦ — песок с температурой +20 °С. Каркас здания цеха смонтирован из блоков-секций длиной 8 и 9 м каждый.
Размеры цеха А*В*Н =48*30*9м.
Вспомогательные помещения двухэтажные высотой 4 м.
Перечень оборудования ЭМЦ дан в таблице 1.
Мощность электропотребления (Рэп) указана для одного электроприемника.
Расположение основного оборудования показано на плане (рис. 1 в Приложении).
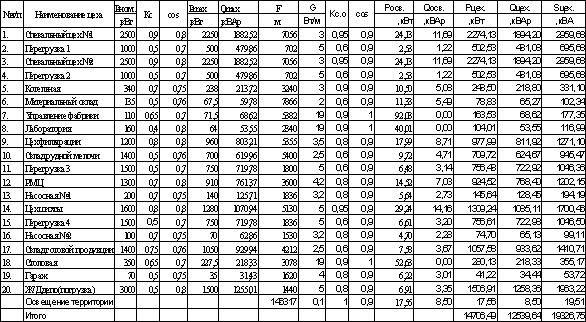
Таблица 1. Перечень ЭО электромеханического цеха
| № на плане | Наименование ЭО | Рэп, кВт | Примечание |
| 1 | 2 | 3 | 4 |
| 1, 21 | Краны мостовые | 30 кВ*А | ПВ = 25 % |
| 2, 3, 22, 23 | Манипуляторы электрические | 2,8 | |
| 6, 28 | Точильно-шлифовальные станки | 2,2 | |
| 7, 8, 26, 27 | Настольно-сверлильные станки | 1,5 | |
| 9, 10, 29, 30 | Токарные полуавтоматы | 9,2 | |
| 11 … 14 | Токарные станки | 11 | |
| 15…20, 33…37 | Слиткообдирочные станки | 2 | |
| 24, 25 | Горизонтально-фрезерные станки | 5,5 | |
| 31, 32 | Продольно-строгальные станки | 7,8 | |
| 38 … 40 | Анодно-механические станки | 60 | |
| 41 | Тельфер | 5 | |
| 42, 43 | Вентиляторы | 6 |
Рациональное освещение рабочего места является одним из важнейших факторов, влияющих на эффективность трудовой деятельности человека, предупреждающих травматизм и профессиональные заболевания. Правильно организованное освещение создает благоприятные условия труда, повышает работоспособность и производительность труда. Освещение на рабочем месте должно быть таким, чтобы работник мог без напряжения зрения выполнять свою работу. Утомляемость органов зрения зависит от ряда причин:
· недостаточность освещенности;
· чрезмерная освещенность;
· неправильное направление света.
Недостаточность освещения приводит к напряжению зрения, ослабляет внимание, приводит к наступлению преждевременной утомленности. Чрезмерно яркое освещение вызывает ослепление, раздражение и резь в глазах. Неправильное направление света на рабочем месте может создавать резкие тени, блики, дезориентировать работающего. Все эти причины могут привести к несчастному случаю или профзаболеваниям, поэтому столь важен правильный расчет освещенности.
Расчет освещенности рабочего места сводится к выбору системы освещения, определению необходимого числа светильников, их типа и размещения. Процесс работы в цехе происходит в таких условиях, когда естественное освещение недостаточно или отсутствует. Исходя из этого, рассчитаем параметры искусственного освещения.
Целью расчета является выбор количества светильников, определение мощности источников света, расположение их в помещение цеха, а также расчет осветительной сети.
Исходными данными являются: назначение цеха (электромеханический цех) и его размеры:
А = 48 м - длина;
В = 30 м - ширина;
Н = 9 м - высота.
hр – пол
В качестве источников света выбираем дуговую ртутную лампу высокого давления для общего освещения типа ДРЛ, так как 1) высота помещения превышает 6м; 2) ДРЛ удобна в эксплуатации: Рассчитаны на большие сроки службы, имеют большой световой поток, высокую световую отдачу и незначительные размеры, выпускаются на большие мощности; 3) работа ДРЛ не зависит от температуры окружающей среды.
Норма освещенности для данного производственного помещения: Еmin=200 Лк.
Для производственного помещения выбираем рабочее равномерное общее освещение, а также аварийное освещение.
В качестве светильника выбираем светильник типа РСП 13 со степенью защиты 53 , классом светораспределения - П, КСС в нижнюю полусферу глубокий Г1 (0,8-1,2).
Расстояние от светильника до рабочей поверхности, м:
Нр = Н - (hс - hр)
где Н = 9 м- высота помещения;
hс = 0,7 м - высота свеса;
hр = 0 м - высота рабочей поверхности (пол).
Нр = 9 - (0,7 + 0) = 8,3 м.
Расстояние между светильниками для КСС Г1:
L = (0,8 - 1,2) ∙ Нр = 0,8 * 8,3 = 6,64 м.
Расстояние от края светильника до стен:
l = 0,5 ∙ L = 0,5*6,64 = 3,32 м.
Количество светильников в ряду:
Количество рядов:
nв =  =
=  = 4 шт.
= 4 шт.
Общее количество светильников:
nc= nв *nа = 7*4 = 32 шт.
Расстояние между светильниками в одном ряду:
LА=  =
=  = 6,89 м.
= 6,89 м.
Расстояние между рядами:
LВ= =
=  = 7,78 м
= 7,78 м
Определяем показатель помещения
i =  =
=  = 2,78
= 2,78
По справочнику с учётом коэффициентов отражения и показателя помещения находим коэффициент использования светового потока:
rпот=0,5;rст=0,3; rп=0,1:
u = 73%
Рассчитаем световой поток одой лампы в Лм, если коэффициент минимальной освещённости z = Еср / Еmin = 1,2:
Фл = ![]()
где Kз = 2 - коэффициент запаса;
Еmin – нормированная освещённость, лк.
Фл.р. =  = 29589 лм.
= 29589 лм.
По найденному значению Фл подбираем лампу, поток которой должен отличаться не более, чем на (-10 – +20)%.
Принимаем лампу ДРЛ 700(6) - 3 имеющую следующие технические данные:
номинальная мощность лампы Рн = 700 Вт; световой поток Фл = 40,6 клм.
Общая мощность световой установки:
Руст = Рл *nсв = 700*32 = 22400 Вт.
Составим схему расположения светильников рабочего освещения в цехе (рисунок 2)
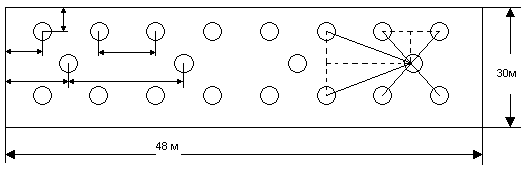
Рисунок 2 - План расположения светильников в цехе.
Для аварийного освещения выбираем лампы типа ЛН (лампы накаливания).
Норма освещенности аварийного освещения сос -тавляет не менее 5% от нормы рабочего освещения, то есть:
Е = Еmin*0,05 = 200*0,05 = 10 лк
Выбираю светильник типа НСП 20, источник света которого должен иметь мощность 500 Вт, для создания кривой силы света Д3, класс светораспределения светльника - П, степень защиты IP52.
По заданной мощности лампы светильника НСП 20, Рл=500Вт, выберем ЛН типа Г125-135-500 с номинальным световым потоком, Фл=9200 лм.
Определим количество ламп для аварийного освещения преобразовав формулу (11.15):
nс =  =
=  = 6 шт.
= 6 шт.
Выбираем светильники типа НСП.
Рассчитаем осветительную сеть рабочего освещения, схема которой приведена на рисунке 3 Линии освещения питают светильники с лампами накаливания, коэффициент мощности которых cosj =1:

Рисунок 3 - Схема осветительной сети аварийного освещения.
Выберем осветительные щиты. При выборе осветительного щитка необходимо чтобы выполнялось условие:
Iном.щ ³ I
где Iном.щ- номинальный ток осветительного щитка, А;
I-расчетный ток питающей линии, А.
Для рабочего освещения выберем щит серии ЯОУ -8503, так как выполняется условие
Iном.щ = 63 А ³ 50 А = I1-2
Для аварийного освещения выберем осветительный щиток серии ЯОУ - 8504, так как выполняется условие
Iном.щ = 63 А ³ 28 А = I1-2
Таблица 2 - Технические данные осветительных щитков серий ЯОУ - 8503 и ЯОУ - 8504 на напряжение 380/220В.
| Тип | Автоматический выключатель | ||
| Тип | Номинальный ток, А | Количество | |
| 1 | 2 | 3 | 4 |
| ЯОУ - 8503 | АЕ - 2044 - 10 | 63 | 6 |
| ЯОУ - 8504 | АЕ - 2046 - 10 | 63 | 2 |
Вентиляционные установки - устройства, обеспечивающие в помещении такое состояние воздушной среды, при котором человек чувствует себя нормально и микроклимат помещений не оказывает неблагоприятного действия на его здоровье.
Для обеспечения требуемого по санитарным нормам качества воздушной среды необходима постоянная смена воздуха в помещении; вместо удаляемого вводится свежий, после соответствующей обработки, воздух. В данном подразделе будет произведен расчет общеобменной вентиляции от избытков тепла. Общеобменная вентиляция - система, в которой воздухообмен, найденный из условий борьбы с вредностью, осуществляется путем подачи и вытяжки воздуха из всего помещения.
Системы отопления и системы кондиционирования следует устанавливать так, чтобы ни теплый, ни холодный воздух не направлялся на людей. На производстве рекомендуется создавать динамический климат с определенными перепадами показателей. Температура воздуха у поверхности пола и на уровне головы не должна отличаться более, чем на 5 градусов. В производственных помещениях помимо естественной вентиляции предусматривают приточно-вытяжную вентиляцию. Основным параметром, определяющим характеристики вентиляционной системы, является кратность обмена, т.е. сколько раз в час сменится воздух в цехе.
Количество вентиляционного воздуха определяется по формуле
Vвент - объем воздуха, необходимый для обмена;
Vпом - объем рабочего помещения.
Для расчета примем следующие размеры рабочего помещения:
длина В = 30 м;
ширина А = 48 м;
высота Н = 9 м.
Соответственно объем помещения равен:
Vпомещ = А*В*H = 12960 м3
Необходимый для обмена объем воздуха Vвент определим исходя из уравнения теплового баланса:
Vвент * С( tуход - tприход ) * Y = 3600 * Qизбыт
![]()
Qизбыт - избыточная теплота (Вт);
С = 1000 - удельная теплопроводность воздуха (Дж/кгК);
Y = 1.2 - плотность воздуха (мг/см).
Температура уходящего воздуха определяется по формуле:
tуход = tр.м. + (Н - 2 )t , где
t = 2°С - превышение t на 1м высоты помещения;
tр.м. = 22°С - температура на рабочем месте;
Н = 9 м - высота помещения;
tприход = 18 градусов.
tуход = 22 + (9 - 2)*2 = 36
Qизбыт = Qизб.1 + Qизб.2 + Qизб.3 , где
Qизб. - избыток тепла от электрооборудования и освещения.
Qизб.1 = Е * р , где
Е - коэффициент потерь электроэнергии на теплоотвод ( Е=0.55 для освещения);
р - мощность, р = 700 Вт * 32 = 22400 Вт.
Qизб.1 = 0.55 * 22400=12320 Вт
Qизб.2 - теплопоступление от солнечной радиации,
Qизб.2 =m * S * k * Qc , где
m - число окон, примем m = 20;
S - площадь окна, S = 1,8 * 2 = 3.6 м2;
k - коэффициент, учитывающий остекление. Для двойного остекления
k = 0.6;
Qc = 127 Вт/м - теплопоступление от окон.
Qизб.2 = 3.6 * 20 * 0.6 * 127 = 5486 Вт
Qизб.3 - тепловыделения людей
Qизб.3 = n * q , где
q = 15 Вт/чел. , n - число людей в смене, например, n = 40
Qизб.3 = 40 * 80 = 3200 Вт
Qизбыт = 12320 + 5486 + 3200 = 21006 Вт
Из уравнения теплового баланса следует:
Vвент м3
м3
Оптимальным вариантом является кондиционирование воздуха, т.е. автоматическое поддержание его состояния в помещении в соответствии с определенными требованиями (заданная температура, влажность, подвижность воздуха) независимо от изменения состояния наружного воздуха и условий в самом помещении.
Определяем необходимую кратность воздухообмена:

где Vпом = n * Sчел * Н , (11.15)
n=40 - число людей в помещении;
Sчел - площадь производственного помещения, приходящаяся на 1 человека (по нормам для работы в цехе Sчел=6 м) ;
Н =4 м - высота помещения.
Кратность воздухообмена:
Произведем подбор вентилятора по аэродинамическим характеристикам и специальным номограммам
Исходными данными для выбора вентилятора являются:
- расчетная производительность вентилятора:
Vрасч = 1.1 * Vвент = 1.1*3858 = 4244 м /ч, (11.16)
где 1.1 - коэффициент, учитывающий утечки и подсосы воздуха.
- напор (полное давление), обеспечиваемый вентилятором:
Hв = 10*v/2 * Y , (11.17)
где Y=1.3 кг/м - плотность воздуха,
v - окружная скорость вентилятора; ограничивается предельно допустимым уровнем шума в помещении.
Для центробежных вентиляторов низкого для цеховых помещений v должна быть не менее 35 м/с. Для расчета
примем v=40 м/с.
Тогда Hв = 10*40/2 * 1,3 = 26 Па.
По исходным данным выбираем центробежный вентилятор низкого давления Ц4-70N5. По номограммам определяем его характеристики:
- число оборотов - 1000 об/мин;
- КПД вентилятора - 0.8.
Необходимая установочная мощность электродвигателя:
 Вт
Вт
где η - КПД вентилятора.
IV. Расчет грузоподъемного механизма.Электрические подъёмные краны - это устройства служащие для вертикального и горизонтального перемещения грузов. Подвижная металлическая конструкция с расположенной на ней подъемной лебёдкой являются основными элементами подъёмного крана. Механизм подъемной лебёдки приводится в действие электрическим двигателем.
Подъемный кран представляет собой грузоподъемную машину циклического действия, предназначенную для подъема и перемещения груза, удерживаемого грузозахватным устройством (крюк, грейфер). Он является наиболее распространенной грузоподъемной машиной, имеющей весьма разнообразное конструктивное исполнение и назначение.
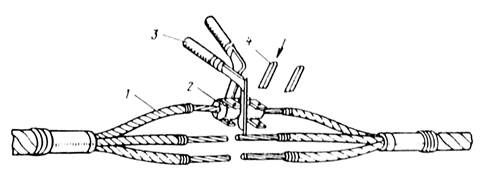
Мостовой кран (рис. 4.1) представляет собой мост, перемещающейся по крановым путям на ходовых колесах, которые установлены на концевых балках. Пути укладываются на подкрановые балки, опирающиеся на выступы верхней части колонны цеха. Механизм передвижения крана установлен на мосту крана. Управление всеми механизмами происходит из кабины прикрепленной к мосту крана. Питание электродвигателей осуществляется по цеховым троллеям. Для подвода электроэнергии применяют токосъемы скользящего типа, прикрепленные к металлоконструкции крана. В современных конструкциях мостовых кранов токопровод осуществляется с помощью гибкого кабеля. Привод ходовых колес осуществляется от электродвигателя через редуктор и трансмиссионный вал.
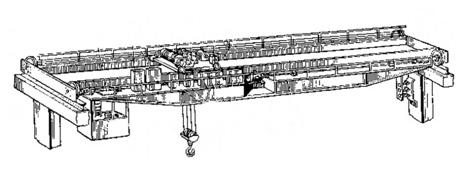
Рисунок 4.1 – Общий вид мостового крана.
Любой современный грузоподъемный кран в соответствии с требованиями безопасности, может иметь для каждого рабочего движения в трех плоскостях, следующие самостоятельные механизмы: механизм подъема - опускания груза, механизм передвижения крана в горизонтальной плоскости и механизмы обслуживания зоны работы крана (передвижения тележки).
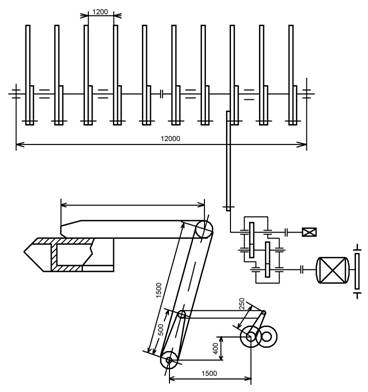
Типичная кинематическая схема механизма подъема крана приведена на рисунке 4.2
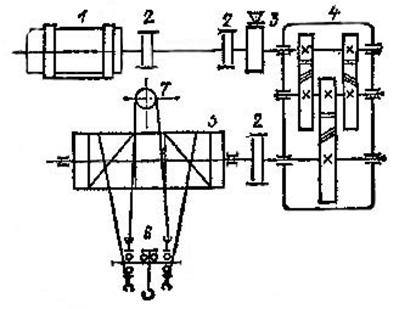
Рисунок 4.2 - Кинематическая схема механизма подъема главного крюка: 1 - двигатель; 2 - муфта; 3 - тормоз; 4 - редук -тор; 5 - барабан; 6 - полиспаст; 7 - неподвижный блок полис - пасты.
К основным параметрам механизма подъёма относятся: грузоподъемность, скорость подъема крюка, режим работы, высота подъема грузозахватного устройства.
Номинальная грузоподъемность - масса номинального груза на крюке или захватном устройстве, поднимаемого грузоподъемной машиной.
Скорость подъема крюка выбирают в зависимости от требований технологического процесса, в котором участвует данная грузоподъемная машина, характера работы, типа машины и ее производительности.
Режим работы грузоподъемных машин цикличен. Цикл состоит из перемещения груза по заданной траектории и возврата в исходное положение для нового цикла.
Для данного мостового крана рекомендуемые режимные группы:
5К - группа режима работы крана;
4М - группа режима работы механизма подъема.
На крановых установках допускается применять рабочее напряжение до 500 В, поэтому крановые механизмы снабжают электрооборудованием на напряжения 220, 380, 500 В переменного тока и 220, 440 В постоянного тока. В схеме управления предусматривают максимальную защиту, отключающую двигатель при перегрузке и коротком замыкании. Нулевая защита исключает самозапуск двигателей при подаче напряжения после перерыва в электроснабжении. Для безопасного обслуживания электрооборудования, находящегося на ферме моста, устанавливают, блокировочные контакты на люке и двери кабины. При открывании люка или двери напряжение с электрооборудования снимается.
Правилами Госгортехнадзора предусматривается четыре режима работы механизмов: лёгкий - Л, средний - С, тяжёлый - Т, весьма тяжёлый - ВТ.
Определяем режим работы крана: Проектируемый мостовой кран работает в среднем режиме с ПВ40.
Исходными данными проектирования являются физические и геометрические параметры механизма подъема мостового крана, а также размеры помещения цеха, в котором расположен кран. Исходные данные представлены в таблице 6 в п.6.
V. Разработка схемы управления мостового крана.Целью данного расчета является выбор магнитного контроллера переменного тока, в соответствии с его выбором определяются сопротивления и токи ступеней для электропривода механизма передвижения тележки мостового крана.
Исходными данными являются технические характеристики выбранного электродвигателя в пункте 5.
Базисный момент, Нм:
М100% = 9550 ∙ 
М100% = 9550 ∙  =649,5 Нм.
=649,5 Нм.
Определяем расчетный ток резистора, А:
I100% = 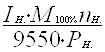
где Iн - номинальный ток ротора, А;
Рн - номинальная мощность электродвигателя, кВт;
nн - номинальная частота вращения, об/мин.
I100%=  = 103,15 А.
= 103,15 А.
6.3 Определяем номинальное сопротивление резистора, в Ом:
Rн = ![]() (6.3)
(6.3)
![]()
где Ерн - напряжение между кольцами ротора, В.
Rн = ![]() = 1,9 Ом.
= 1,9 Ом.
Согласно Ю.В. Алексееву и А.П. Богословскому для магнитного контроллера ТСАЗ160 с защитой на переменном токе находим разбивку ступеней сопротивлений и определяем сопротивление каждого резистора (в одной фазе):
R = Rном. ∙
Обозначение ступени Rступ,% R ,Ом
Р1 - Р4 5 0,095
Р4 - Р7 10 0,19
Р71 - Р10 20 0,38
Р10 - Р13 27 0,513
Р13 - Р16 76 1,444
Р16 - Р19 72 1,368
Общее 210 3,99
Находим расчетную мощность резистора (в трех фа -зах), кВт:
Рр = 
Определяем параметры для условий режима С:
Частота включений фактическая 120 в час, приведенная
z = 120 ∙ = 120 ∙
= 120 ∙  = 133,6; (6.6)
= 133,6; (6.6) ![]()
k = 1,25 - коэффициент нагрузки;
а = 1,2 - коэффициент использования;
hэкв.б = 0,76 - базисный КПД электропривода;
hэкв = 0,73 - КПД электропривода для z = 136,2, согласно ![]() рис. 8 - 11.;
рис. 8 - 11.;
hдв = 0,85 - КПД электродвигателя;
e0 = 0,4 - относительная продолжительность включения.
Рр =  =16,2 кВт.
=16,2 кВт.
На одну фазу приходится: ![]() = 5,4 кВт.
= 5,4 кВт.
Определяем расчетный ток резистора, А. Токовые нагрузки I100% по ступеням берём из ![]() ,таблица 7 - 9:
,таблица 7 - 9:
Iр =  (6.7)
(6.7)
![]() Iр=
Iр= = 60,61 А.
= 60,61 А.
Значения расчетных токов по ступеням:
I = Iр ∙  (6.8)
(6.8)
![]()
Обозначение ступени Iступ, % I , А
Р1 - Р4 83 50,3
Р4 - Р7 59 35,75
Р71 - Р10 59 35,75
Р10 - Р13 50 30,3
Р13 - Р16 42 25,45
Р16 - Р19 30 18,18
В соответствии с таблицей нормализованных ящиков резисторов НФ 1А выбираем для ступеней Р1 - Р4, Р4 - Р7, Р7 - Р10 ящик 2ТД.754.054-06, имеющий длительный ток 102 А и сопротивление 0,48 Ом. Для ступеней Р10 - Р13, Р13 - Р16 выбираем ящик 2ТД.754.054-08, имеющий длительный ток 64 А и сопротивление 1,28 Ом. Для ступеней Р16 - Р19, выбираем ящик 2ТД.754.054-11, имеющий длительный ток 41 А и сопротивление 3,1 Ом. Рассчитаем отклонение сопротивлений от расчета и данные занесем в таблицу
R% =  100%
100%
Таблица Отклонения сопротивлений от расчета.
| Ступени | Rрасч ,Ом | Rфакт ,Ом | R% ,.% |
| 1 | 2 | 3 | 4 |
| Р1-Р4 | 0,095 | 0,096 | -1 |
| Р4-Р10 | 0,19 | 0,196 | -3,157 |
| Р71-Р10 | 0,38 | 0,352 | 7,3 |
| Р10-Р13 | 0,513 | 0,512 | 0,2 |
| Р13-Р16 | 1,444 | 1,444 | 0 |
| Р16-Р19 | 1,368 | 1,387 | -1,38 |
| Итого | 4,3 | ||
Учитывая что, длительные токи выбранных ящиков сопротивлений соответствуют расчетным значениям токов ступеней и отклонение сопротивлений отдельных ступеней от расчетных значений не превышает ±15% , а отклонение общего сопротивления резистора не превышает ±5% его расчетного значения, резистор выбран правильно.
Проверки по кратковременному режиму не производим, так как расчетный ток Iр=60,61 А близок к длительному току пусковых ступеней.
VI. Характеристика мостового крана.Таблица 6 - Исходные данные крана.
| Наименование параметра | Значение параметра |
| 1 | 2 |
| Грузоподъемность главного крюка | 80 т |
| Скорость подъема главного крюка | 4,6 м/мин |
| Скорость передвижения крана | 75 м/мин |
| Скорость передвижения тележки | 30 м/мин |
| Высота подъема главного крюка | 6 м |
| Вес главного крюка | 0,8т |
| Диаметр барабана лебедки главного крюка | 700 мм |
| Вес тележки | 33 т |
| Длина перемещения моста | 60 м |
| Длина перемещения тележки | 22 м |
| КПД главного подъема под нагрузкой | 0,84 |
| КПД главного подъема при холостом ходе | 0,42 |
| КПД моста | 0,82 |
| КПД тележки | 0,79 |
| Длина помещения цеха | 62 м |
| Ширина помещения цеха | 15,5 м |
| Высота помещения цеха | 10 м |
| Режим работы крана средний | С |
| Продолжительность включения крана % | 40% |
Целью расчета является определение статических нагрузок, приведенных к валу электродвигателя, для выбора мощности электродвигателя механизма подъема мостового крана.
Статическая мощность на валу электродвигателя подъемной лебедки при подъеме груза, в кВт определяется следующим образом:
Рст.гр.под = ![]()
где G=m∙g=80∙103∙ 9,8=784000H-вес поднимаемого груза;
m-номинальная грузоподъемность, кг;
g-ускорение свободного падения, м/с2;
G0=m0∙g=0,8∙103∙9,8=7840Н-веспустого захватывающего приспособления;
m0 - масса пустого захватывающего приспособления, кг;
vн = 4,6м/мин = 0,07 м/с - скорость подъема груза;
hнагр = 0,84 - КПД под нагрузкой.
Р ст.гр.под .=  = 65,98 кВт.
= 65,98 кВт.
Мощность на валу электродвигателя при подъеме пустого захватывающего приспособления, кВт:
Р ст.п.гр.=  (4.2)
(4.2) ![]()
где hхх=0,42 - КПД механизма при холостом ходе.
Рст.п.гр.=  =1,3 кВт.
=1,3 кВт.
Мощность на валу электродвигателя обусловленная весом груза, кВт:
Ргр.=(G+G0)*vс*10-3
где vс=vн=0,07 м/с - скорость спуска.
Ргр=(784000+7840)*0,07*10-3=55,42 кВт.
Мощность на валу электродвигателя, обусловленная силой трения, кВт:
Ртр.=( ) * (1 - нагр.) * vc * 10-3
) * (1 - нагр.) * vc * 10-3
Ртр .= ( ) * (1-0,84) * 0,07 * 10-3 = 8,88 кВт.
) * (1-0,84) * 0,07 * 10-3 = 8,88 кВт.
Так как выполняется условие Ргр > Ртр,следовательно, электродвигатель работает в режиме тормозного спуска.
Мощность на валу электродвигателя при тормозном спуске, определяется следующим способом, кВт:
Рт.сп.=(G+G0)*Vс*(2-![]() )*10-3
)*10-3
Рст.сп.=(784000+7840)*0,07*(2-![]() )*10-3=44,8 кВт.
)*10-3=44,8 кВт.
Мощность на валу электродвигателя во время спуска порожнего захватывающего приспособления, кВт:
Рс.ст.о.=G0∙Vс∙ (![]() -2) ∙10-3
-2) ∙10-3
Рс.ст.о.=7840∙0,07(![]() -2) ∙10-3=0,2 кВт.
-2) ∙10-3=0,2 кВт.
Рассчитаем нагрузочный график механизма подъема мостового крана для наиболее характерного цикла работы
Время подъема груза на высоту Н:
tр1=  =85,7 сек.
=85,7 сек.
где Н-высота подъема груза, м.
Время перемещения груза на расстояние L:
t01= =48 сек.
=48 сек.
Время для спуска груза:
tр2= =85,7 сек.
Время на зацепление груза и его отцепления:
t02=t 04=200 сек.
Время подъема порожнего крюка:
tр3= =85,7 сек.
Время необходимое для возврата крана к месту подъема нового груза:
t03= =48 сек.
Время спуска порожнего крюка:
tр4= =39,2 сек.
Вычертим нагрузочный график механизма подъема для рабочего цикла:
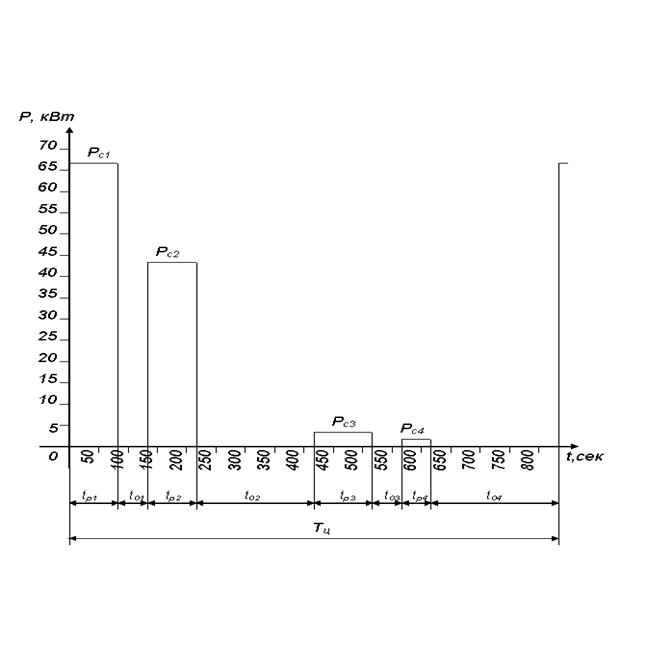
Рисунок 4.1- Нагрузочный график механизма подъема для рабочего цикла.
Таблица 4.1- Рабочий цикл механизма подъема.
| Участки | Подъем груза | Па - уза | Спуск груза | Па - уза | Подъем крюка | Па - уза | Спуск крюка | Па - уза |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Рс, (кВт) | 65,98 | 0 | 44,8 | 0 | 1,3 | 0 | 0,2 | 0 |
| t, (cек) | 85,7 | 48 | 85,7 | 200 | 85,7 | 48 | 85,7 | 200 |
Суммарное время работы электродвигателя:
S tр=tр1+tр2+tр3+tр4=4*85,7 = 342,8 сек.
Суммарное время пауз:
S t0=t01+t02+t03+t04=48+48+200+200=496 сек.
Эквивалентная мощность за суммарное время работы электродвигателя, кВт:
Рэкв=  (4.9)
(4.9) ![]()
Рэкв=  =39,8кВт.
=39,8кВт.
Эквивалентную мощность пересчитываем на стан- дартную продолжительность включения соответствующего режима работы механизма крана, кВт:
Рэн=Рэкв ∙ 
Рэн=39,8∙ ![]() = 1,26 кВт.
= 1,26 кВт.
Определяем расчетную мощность электродвигателя с учетом коэффициента запаса, кВт:
Рдв=
где Кз = 1,2 - коэффициент запаса;
hред = 0,9 - КПД редуктора.
Рдв=  =1,7 кВт.
=1,7 кВт.
Угловая скорость лебедки в рад/с и частота вращения лебедки в об/мин, определяется следующим способом:
wл=![]()
где D - диаметр барабана лебедки, м.
wл =  = 0,2 рад/с.
= 0,2 рад/с.
nл = 
nл =  = 2 об/мин.
= 2 об/мин.
Полученные значение мощности электродвигателя в пункте (4.11) и значение стандартной продолжительности включения ПВст = 20% , будут являться основными критериями для выбора электродвигателя.
Выберем электродвигатель из следующих условий:
Рном ³ Рдв
Рном ³ 50,7 кВт
Таблица 4.2 - Технические данные асинхронного электро - двигателя с фазным ротором типа МТН512-6
| Параметры двигателя | Значение параметра |
| 1 | 2 |
| Мощность, Рн | 55 кВт |
| Частота вращения, nн | 970 об/мин |
| Ток статора, I1 | 99 А |
| Коэффициент мощности, Соs j | 0,76 |
| КПД, hн | 89 % |
| Ток ротора, I2 | 86 А |
| Напряжение ротора, U2 | 340 В |
| Максимальный момент, Мm | 1630 Нм |
| Маховый момент, GD2 | 4,10 кг∙м2 |
| Напряжение, U | 380 В |
| Частота, f | 50 Гц |
| Продолжительность включения, ПВст | 25 % |
Целью расчета является расчет и построение естественной механической характеристик электродвигателя и механизма подъёма мостового крана.
Исходными данными являются технические данные выбранного электродвигателя МТН 512-6, и механизма подъёма, а также данные обмоток ротора и статора:
r1=0,065 Ом - активное сопротивление обмотки статора;
х1=0,161 Ом - реактивное сопротивление обмотки ста -тора;
r2=0,05 Ом - активное сопротивление обмотки ротора;
х2=0,197 Ом - реактивное сопротивление обмотки рото -ра;
к =1,21- коэффициент приведения сопротивления.
Определим номинальное скольжение:
S н= ,
,
где w0 =  =
= =104,6 рад/с;
=104,6 рад/с;
wн = ![]() =
= =101,526 рад/с.
=101,526 рад/с.![]()
sн =  =0,03
=0,03
Номинальный момент:
Мн=![]()
![]() =
= =541,73 Нм
=541,73 Нм
Определим коэффициент перегрузочной способности:
λ =  =
=  = 3
= 3
Определим критическое скольжение:
sкр= sн( λ+√(λ 2-1))
sкр=0,03(3+√(32-1))=0,17
Определим номинальное активное сопротивление ротора:
r2н= =
= =2,28 Ом
=2,28 Ом
где U2 - напряжение ротора, В;
I2 - ток ротора, А.
Активное сопротивление обмотки ротора:
R2вт=R2н∙Sн=2,28∙0,03=0,068 Ом
Найдём суммарное активное сопротивление роторной цепи для каждой ступени:
R2 =R2вт+R2ВШ
где R2вш - сопротивление реостата в цепи ротора =3,9 R2 =3,968
Для построения механических характеристик зададимся значениями скольжения от 0 до 1 и подставим в выражение:
М = 2 ∙ Ммах. ∙ ,
,
где а =  =
=  = 0,88
= 0,88
Рассчитаем механическую характеристику механизма подъёма мостового крана.
Механические характеристики производственных механизмов рассчитываются по формуле Бланка, Нм:
Мст. = М0 + (Мст.н - М0) ∙  ,
,
где Мст0 - момент сопротивления трения в движущихся частях, Нм;
Мст.н - момент сопротивления при номинальной скорости, Нм;
![]() - номинальная угловая скорость вращения ротора электродвигателя, рад/с;
- номинальная угловая скорость вращения ротора электродвигателя, рад/с;
![]() - изменяемая
угловая скорость вращения ротора электродвигателя, рад/с;
- изменяемая
угловая скорость вращения ротора электродвигателя, рад/с;
х - показатель степени, который характеризует статический момент при изменении скорости вращения. Для механизмов перемещения и подъёма кранов х = 0. Следовательно:
Мст. = Мст.н. = ![]() ,
,
где Рст = 65,98 кВт - статическая эквивалентная мощность, пересчитанная на стандартную продолжительность включения, кВт;
![]() - номинальная угловая скорость вращения ротора электродвигателя, рад/с;
- номинальная угловая скорость вращения ротора электродвигателя, рад/с;
Мст. = Мст.н. =  = 649,8 Нм.
= 649,8 Нм.
Построение графика механической характеристики механизма подъёма мостового крана производим на том же графике, где и механическая характеристика выбранного электродвигателя (Рисунок 7.1).
По графику видно, что механическая характеристика механизма подъёма имеет форму прямой линии, из этого следует, что статический момент Мст не зависит от скорости вращения.
Таблица 8.
| Se | We | Мдв |
| 0 | 104,6 | 0 |
| 0,01 | 103,5 | 215,9 |
| 0,02 | 102,5 | 420,3 |
| 0,03 | 101,4 | 610,14 |
| 0,1 | 94,14 | 1448,4 |
| 0,17 | 86,8 | 1630 |
| 0,2 | 83,68 | 1611,4 |
| 0,3 | 73,22 | 1424,6 |
| 0,4 | 62,76 | 1217,9 |
| 0,5 | 52,3 | 1046,7 |
| 0,6 | 41,84 | 911,41 |
| 0,7 | 31,38 | 804,27 |
| 0,8 | 20,92 | 718,28 |
| 0,9 | 10,46 | 648,14 |
| 1 | 0 | 590 |
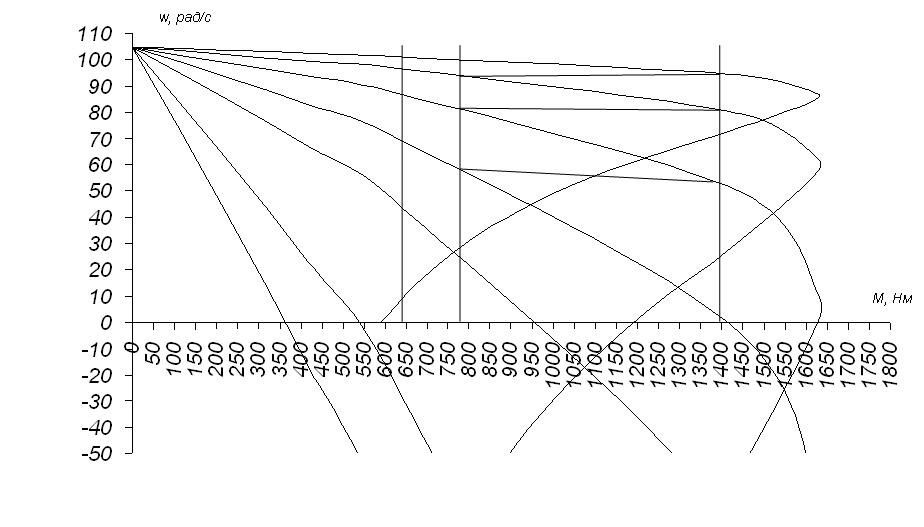
Рисунок 8. Естественные механические характеристики электродвигателя и механизма подъема мостового крана.
IX Расчет и построение графиков переходного процесса при пуске электродвигателя
Целью расчета является построение характеристик зависимости момента и угловой скорости вращения электродвигателя от времени при пуске, а также определение времени переходного процесса.
По реостатным характеристикам (рисунок 8), видно, что электродвигатель можно запустить только по характеристикам 4, 5, 6, поэтому переходной процесс рассчитаем при введенных в цепь ротора сопротивлений rд4, rд5 и rд6.
На рисунке 8 находим установившиеся и начальные значения скоростей на каждой пусковой характеристике.
Таблица 9.1
| Характеристика | Установившиеся скорости рад/с | Начальные скорости рад/с |
| 4 |
|
|
| 5 |
|
|
| 6 |
|
|
Определяем электромеханическую постоянную времени для каждой ступени, сек.:
Тм = Jприв ∙
где Jприв = 1,37 кг/м2 - момент инерции электропривода;
w0 = 104,6 рад/с - угловая скорость идеального холостого хода;
w - начальная скорость;
М1 = 1385,5 Нм момент пуска.
Тм = Jприв ∙
![]() = 1,37 ∙
= 1,37 ∙ = 0,126 сек;
= 0,126 сек;
Тм = Jприв ∙ 
![]() = 1,37 ∙
= 1,37 ∙ = 0,061 сек;
= 0,061 сек;
Тм = Jприв ∙  = 1,37 ∙
= 1,37 ∙  = 0,028сек.
= 0,028сек.
Для каждого интервала скорости рассчитаем соот - ветствующий интервал времени, сек.:
t = Тм ∙ ln ∙ 
где М2 = 779,4 Н м - момент переключения;
Мст = 649,5 Н м- момент статической нагрузки.
t1 = 0,126 ∙ In ∙  = 0,217 сек;
= 0,217 сек;
t2 = 0,061 ∙ In ∙ = 0,105 сек;
t3 = 0,028 ∙ In ∙ = 0,048 сек.
Определим время переходного процесса:
t = t1 + t2 + t3 = 0,217 + 0,105 + 0,048 = 0,37 сек.
Зависимость w=¦(t) для каждой ступени можно рассчитать по уравнению изменения угловой скорости во времени:
w = wуст. ∙ (1 - е-t/Tм)+wнач∙e-t/Tм,
где wуст. - установившаяся угловая скорость, рад/с.
Зависимость М=¦(t) для каждой ступени можно рассчитать по уравнению изменения момента во времени:
М = Муст. ∙ (1 - е-t/Tм) + М1 ∙ е-t/Tм
Результаты расчета занесем в таблицу 9.2 (для rд4), таблицу 9.3 (для rд5) и таблицу 9.4 (для rд6).
Таблица 9.2 - Расчетные данные необходимые для построения графиков зависимостей w=¦(t) и М=¦(t).
| Величины | Характеристики при введённых добавочных сопротивлениях | ||||
| rд4 |
| ||||
| t, сек. | 0 | 0,07 | 0,14 | 0,217 |
|
| w, рад/с | 0 | 29 | 45 | 56 |
|
| М, Нм | 1385,5 | 1073 | 893 | 782 |
|
Таблица 9.3 - Расчетные данные необходимые для построения графиков зависимостей w=¦(t) и М=¦(t).
| Величины | Характеристики при введённых добавочных сопротивлениях | ||||
| rд5 |
| ||||
| t, сек. | 0 | 0,035 | 0,07 | 0,105 |
|
| tнач, сек. | 0,217 | 0,252 | 0,287 | 0,322 |
|
| w, рад/с | 55 | 69 | 77 | 82 |
|
| М, Нм | 1385,5 | 1065 | 885 | 782 |
|
Таблица 9.4 - Расчетные данные необходимые для построения графиков зависимостей w=¦(t) и М=¦(t).
| Величины | Характеристики при введённых добавочных сопротивлениях | ||||
| rд6 |
| ||||
| t, сек. | 0 | 0,016 | 0,032 | 0,048 |
|
| tнач, сек. | 0,322 | 0,338 | 0,354 | 0,37 |
|
| w, рад/с | 82 | 88 | 92 | 94 |
|
| М, Нм | 1385,5 | 1067 | 886 | 782 |
|
По данным таблицы 9.2 строим графики переходного процесса w=¦(t) и М=¦(t), изображенных на рисунке 9.2.
 М,Нм w, рад/с
М,Нм w, рад/с
t, сек
Рисунок 9 – График переходного процесса
Х Разработка электрической принципиальной схемы управления и выбор аппаратуры управления, защиты электропривода механизма подъема мостового крана
Целью расчета является выбор магнитного контроллера, контакторов, магнитных пускателей, реле защиты от токов перегрузки, конечных выключателей электропривода, и защитной панели.
Исходными данными являются технические данные электродвигателя пункта 5, режим работы крана.
Выбор магнитного контроллера.
Магнитные контроллеры представляют собой сложные комплектные коммутационные устройства для управления крановыми электроприводами. В магнитных контроллерах коммутация главных цепей осуществляется с помощью контакторов с электромагнитным приводом.
Выбор магнитных контроллеров для крановых механизмов определяется режимом работы механизма и зависит от параметров износостойкости контакторов. Магнитные контроллеры должны быть рассчитаны на коммутацию наибольших допустимых значений тока включения, а номинальный ток их Iн должен быть равен или больше расчетного тока двигателя при заданных условиях эксплуатации и заданных режимах работы механизма:
Iн³ Iр*к
где к = 0,8- коэффициент, учитывающий режим работы механизма.
Выберем магнитный контроллер серии ТСАЗ160, так как он удовлетворяет условию выбора:
Iн = 160 А > 68,8 А = 86 0,8 = Iр к
Таблица 10.1 - Технические данные магнитного контроллера ТСАЗ160.
| Тип контроллера | Режим работы механизма | Назначение | Номинальный ток, А | Наибольший допустимый ток включения, А | Количество управляемых двигателей |
| 1 | 2 | 3 | 4 | 5 | 6 |
| ТСАЗ160 | С для кранов металлурги - ческого производства | Механизм подъема со встроенной защитой | 160 | 700 | 1 |
Выбор контакторов.
Контакторы используются в системах управления крановыми электроприводами для осуществления коммутации тока в главных цепях при дистанционном управлении.
Контакторы серий КТ и КТП предназначены для коммутации главных цепей электроприводов переменного тока с номинальным напряжением 380 В.
Контакторы серии КТП выполняются с втягивающими катушками постоянного тока на номинальное напряжение: 24, 48, 110 и 220 В. Серии контакторов КТП применяемые в крановых ЭП, охватывают четыре величины на номинальные токи: 100, 160, 250 и 400 А.
Выбор контактора произведем по пусковому току двигателя Iп, который должен быть меньше или равен номинальному току включения выбираемого контактора Iн.в.
Iп £ Iн.в
Выберем контактор серии КТП6024, так как он удовлетворяет условию выбора:
Iп = 86 А< 120 А = Iн.в
Таблица10.2 - Технические данные контактора серии КТП6014.
| Тип контактора | Номинальный ток, А | Число включений в час | Износостойкость, 106 циклов В-О | Число главных контактов | Мощность катушки, Вт | ||
| Механическая | Электрическая | ||||||
| Для категорий ДС-3 | Для категорий ДС-4 | ||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| КТП6024 | 120 | 600 | 5 | 0,5 | 0,03 | 4 | 50 |
Выбор защитной панели.
Защитная панель крана является комплектным устройством, в котором расположен общий рубильник питания крана, линейный контактор для обеспечения нулевой защиты и размыкания цепи при срабатывании нулевой защиты, предохранители цепи управления, комплект максимальных реле, а также кнопка и пакетный выключатель, используемый в цепях управления.
Основным назначением защитной панели является обеспечение максимальной и нулевой защиты электроприводов управляемых при помощи кулачковых контроллеров или магнитных контроллеров.
Конструктивно защитная панель представляет собой металлический шкаф с установленными в нем на задней стенке аппаратами и существующим монтажом. В защитной панели установлены только основные и вспомогательные контакты максимальных реле с приводными скобами.
Укомплектуем данный кран защитной панелью типа ПЗКБ 160.
Таблица 10.3 - Технические данные защитной панели типа ПЗКБ 160.
| Тип | Каталожный номер | Напряжение, В | Номинальный ток продолжительного режима, А | Суммарный номинальный ток двигателей, А | Число максимальных реле РЭО 401 | Назначение | Максимальный коммутационный ток, А |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| ПЗКБ 160 | 3ТД.660.046.3 | 380 | 160 | 260 | 8 | Магнитные и кулачковые контроллеры | 1600 |
Выбор реле защиты от перегрузок.
Обеспечение максимальной и нулевой защиты крановых электроприводов управляемых при помощи магнитных контроллеров возлагается на защитные панели.
Для защиты цепей кранового электрооборудования от перегрузок применяется электромагнитное реле мгновенного действия типа РЭО401, которые могут использоваться как в цепях переменного тока, так и постоянного тока. Эти реле входят в комплект защитных панелей. Чтобы защитить двигатель от перегрузки, достаточно иметь электромагнитное реле РЭО401 в одной фазе каждого двигателя. В остальные фазы реле ставится только для защиты проводов.
Реле для отдельных электродвигателей выбирается согласно их мощности и напряжению, и настраиваются на ток срабатывания, равный 2,5-кратному расчетному току номинальной нагрузки для ПВ=40%:
2,5*I1 £ Iреле (9.4)
![]()
Выберем реле серии РЭО401, так как оно удовлетворяет условию выбора:
2,5 I1 = 2,5 99 = 247,5 А < 375 А = Iреле
Таблица 10.4 - Технические данные реле РЭО 401.
| Каталожный номер | Ток катушки, А | Пределы регулирования, А | Выводы катушки | ||
| Реле РЭО 401 | Электромагнит РЭО 401 | При ПВ=40% | При ПВ=100% | ||
| 1 | 2 | 3 | 4 | 5 | 6 |
| 2ТД.304.096-4 | 6ТД.237.004-2 | 375 | 250 | 325-1000 | М12 |
Выбор конечных выключателей.
Защита от перехода механизмом предельных положений осуществляется конечными и путевыми выключателями. Эта защита обязательна к применению для всех механизмов крана.
Контакты конечных выключателей включены в цепь катушки линейного контактора защитной панели и в цепь нулевой защиты магнитных контроллеров.
Для механизма подъема выберем конечный выключатель типа КУ703.
Таблица 10.5 - Технические данные кранового конечного выключателя.
| Тип | Назначение | Привод | Включаемый ток, А | Скорость передвижения механизма, м/мин | Число включений в час | Степень защиты от внешней среды | Отключаемый переменный ток, А до 500 В | Электрическая износостойкость циклов В-О | Механическая износостойкость, циклов В-О | Число цепей |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| КУ 703 | Механизм подъема | Самовозврат под действием груза | 10 | 1-80 | 600 | IP44 | 10 | 0,3*106 | 1*106 | 2 |
Охрана труда - это система законодательных актов, социально-экономических, организационных, технических, гигиенических и лечебно-профилактических мероприятий и средств, обеспечивающих безопасность, сохранение здоровья и работоспособности человека в процессе труда.
Полностью безопасных и безвредных производственных процессов не существует. Задача охраны труда - свести к минимальной вероятность поражения или заболевания работающего с одновременным обеспечением комфорта при максимальной производительности труда.
Большое значение в охране труда имеет техника безопасности, представляющая собой систему организационных мероприятий и технических средств, предотвращающие воздействие на работающих с опасными производственными факторами, а также производственно-санитарные система организационных мероприятий и тех средств, предотвращающие вредные производственные факторы.
Охрана труда также тесно связанна с охраной окружающей среды-атмосферы, водоемов и почвы. В целях охраны здоровья трудящихся в нашей стране применяется социальное страхование-система материального обеспечения в старости, в случаях болезни и потери трудоспособности. Она осуществляется за счет страховых взносов предприятий (учреждений, организаций) и дотаций из государственного бюджета. Охрана природы - это система мероприятий, направленные на поддержание рационального взаимодействия между деятельностью человека и окружающей природной средой, обеспечивающая сохранение и восстановление природных богатств, рациональное использование природных ресурсов предупреждающие прямое и косвенное вредное влияние результатов деятельности общества на природу и здоровья человека. Очень важную роль играет микроклимат производственных помещений, который характеризуется действующим на организм человека сочетание температуры, электромагнитными излучениями, с содержанием в воздухе вредных веществ и наличием определенного уровня шума и вибраций. Санитарных норм и требований к окружающей среде на промышленных предприятиях изложены в санитарных нормах проектирования промышленных предприятий.
Литература:
1. Cоколов М.В. Электрическое освещение.1998 г.
2. Абдулаев М.К. Техника безопасности при производстве сварочных работ. Оборониз-1989 г.
3. Батурин В.В. Отопление, вентиляция и газоснабжение.1989 г.
4. Васин В.М. Электрический привод: Учеб. Пособие для техникумов. - М.: Высшая школа, 1984г.
5. Зюзин А.Ф., Поконов Н.З., Вишток А.М. Монтаж, эксплуатация и ремонт электрооборудования промышленных предприятий и установок. 2-е изд., доп. и перераб. - М.: Высшая школа, 1980г.
6. Коновалова Л.Л., Рожкова Л.Д. Электроснабжение промышленных предприятий и установок. - М.: Высшая школа, 1980г.
7. Крановое электрооборудование: Справочник / Ю.В. Алексеев, А.П. Богословский. - М.: Энергия, 1979г.
8. Крановый электропривод: Справочник / А.Г. Яуре, Е.М. Певзнер. - М.: Энергоатомиздат, 1988г.
9. Липкин Б.Ю. Электроснабжение промышленных установок, Москва, Высшая школа, 1990г.
10. Липкин Б.Ю. Электроснабжение промышленных пред- приятий и установок. - М.: Высшая школа, 1981г.
11. Методическое пособие по практической работе по электрооборудованию по теме: Расчет мощности и выбор кранового электродвигателя. Выбор аппаратуры управления и защиты.
12. Методическое пособие по практической работе по электрооборудованию по теме: Расчет освещения произ -водственного цеха по заданным условиям. Составление схемы питания осветительной установки. Выбор аппаратов управле- ния освещением.
13. Справочная книга по светотехнике / Ю.Б. Айзенберг. – 2-е изд. перераб. и доп. - М.: Энергоатомиздат,1995г.
14. Справочник по проектированию электрических сетей электрооборудования. Москва, Энергоатомиздат, 1991г. ред. Ю.Г.Барыбина и др.
15. Справочник по проектированию электроснабжения. Ред. Ю. Г. Барыбина и др. Москва, Энергоатомиздат, 1990г.
16. Справочник электромонтера, том 1 и 2, М.Д.Гаренштейн, Новосибирск, 1884г.
17. Цетлин Б.Б. Техника безопасности в машиностроении.1996 г.
18. Чекалин. «Охрана труда в электрохозяйствах промышленных предприятий» Москва, Энергоатомиздат, 1990г.
19. Электротехнический справочник, тома 1, 2,3. Москва, Энергоатомиздат, 1985г.
Похожие работы
... четырехпроходную сеть напряжением 380/220В частоты 50Гц. Питание электрооборудования будет осуществляться от цеховой ТП. Т.к. потребители по надежности электроснабжения относятся к 2 и 3 категории, то на ТП устанавливаем 1 трансформатор и предусматриваем низковольтную резервную перемычку от ТП соседнего цеха. Раздел 3 Определение расчетных силовых нагрузок Правильное определение ожидаемых ( ...
... Система распределения большого количества электроэнергии должна обладать высокими техническими и экономическими показателями и базироваться на новейших достижениях современной техники. Поэтому электроснабжение промышленных предприятий и гражданских зданий должно основываться на использовании современного конкурентоспособного электротехнического оборудования и прогрессивных схем питания, широком ...
... Конвейерный транспорт. Поточно-транспортные системы. На металлургических заводах очень широко используется конвейерный транспорт. Комплекс подготовительных цехов крупного металлургического комбината, состоящий из обогатительных и агломерационных фабрик, коксохимических и огнеупорных цехов, может иметь конвейерные линии протяжённостью около ста километров. На таком предприятии насчитывается свыше ...

... . Итого: 37187,28 + 4500 + 16208 + 24312 + 7151,4 + 8581,68 + 143028 + + 88358,24 = 329326,60 рублей 5. Безопасность жизнедеятельности 5.1 Безопасность при эксплуатации электрооборудования сталкивателя Оперативные переключения должен выполнять оперативный или оперативно-ремонтный персонал, допущенный распорядительным документом. В электроустановках не допускается приближение людей, ...
0 комментариев