Государственное образовательное учреждение высшего профессионального образования
Контрольная работа по курсу
Теория машин и механизмов
Кинематическое исследование кривошипно-балансирного механизма
2009 год
Содержание
Кинематическое исследование кривошипно-балансирного механизма
Построение кинематических диаграмм
Построение планов скоростей и ускорений кривошипно-балансирного механизма
Кинетостатический анализ механизма
Задание
1. Построить в выбранном масштабе согласно своему варианту схему механизма для восьми положений кривошипа. Начальное положение ведущего звена (кривошипа ОА) определяется углом J0. Все последующие положения звена ОА определяются через 45º от первоначального.
2. Построить траектории точек S и С2.
3. Построить диаграмму перемещения точки В.
4. Методом графического дифференцирования построить диаграммы изменения скорости и ускорения точки В.
5. Построить планы скоростей и ускорений для восьми заданных положений механизма и определить значения скорости и ускорений характерных точек.
6. Для одного из положений механизма определить силы давления в кинематических парах, учитывая силы инерции звеньев, веса, момента инерции звеньев относительно осей, проходящих через их центры тяжести, полезные сопротивления, приложенные к ведомому звену. Силы полезного сопротивления Рсопр и моменты полезного сопротивления Мсопр следует направить против движения ведомого звена.
7. Пользуясь найденным давлением в шарнире А, подсчитать уравновешивающий момент на ведущем кривошипе ОА и затем для проверки определить этот же момент методом рычага Жуковского.
Данные для построения:
| Вариант | Схема механизма | Размеры звеньев в мм | Q | φ | n, об. /мин ведущего звена | |||||
| ОА | АВ | ВО1 | AS2 | BS3 | OO1 | |||||
| 7 в | Рис.7 | 100 | 400 | 150 | 250 | 60 | 400 | 100 | 10 | 920 |
| Вариант | Вес звеньев, Н | Моменты инерции относительно осей, проходящих через центры массы звеньев 2 и 3, кг∙м2 | Сила сопротив-ления, Н | Момент сопротив-ления, Н *м | ||
| Звено 2 | Звено 3 | Звено 2 | Звено 3 | Рсопр | Мсопр | |
| G2 | G3 | JS2 | JS3 | |||
| 7 (а, б, в, г, д, е) | 50 | 30 | 0,06 | 0,02 | - | 400 |
Начертим в выбранном масштабе 1: 4 кинематическую схему механизма (рис. 1).
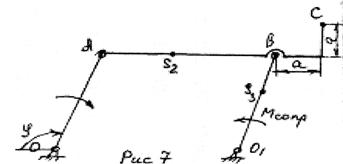
Рис. 1
Для построения плана положений звеньев необходимо:
1. Построить траекторию центра шарнира А, ведущего звена, для этого проводим окружность радиуса ОА.
2. Отметить на траектории движения точки А 6÷8÷12 и т.д. положений шарнира А.
3. Построить траекторию движения точки В ползуна, совершающего возвратно-поступательное движение.
4. Найти на траектории движения точки В 6÷8÷12 и т.д. положений ползуна, соответствующих отмеченным положениям шарнира А. Для этого необходимо взять раствор циркуля, равный длине шатуна АВ, и сделать из каждого положения точки А засечки на траектории движения точки В. Полученные точки А и В в соответствии соединить прямыми.
При вращении кривошипа ОА ползун В совершает возвратно-поступательное движение из одного крайнего положения в другое. Под крайним положением звена, совершающего возвратно-поступательное или колебательное движение, понимают положение, соответствующее изменению направления движения звена.
В крайнем правом положении ползун В будет находиться на наибольшем расстоянии от шарнира О. Это положение будет тогда, когда кривошип ОА и шатун АВ расположатся по одной прямой один за другим. Для нахождения этого положения необходимо из центра шарнира О радиусом равным (ОА + АВ) = 100+400=500 сделать засечку на траектории движения точки В.
В крайнем левом положении точка В должна находиться на наименьшем расстоянии от шарнира О. Это положение будет тогда, когда кривошип ОА и шатун АВ расположатся по одной прямой. Для нахождения этого положения необходимо из центра шарнира О радиусом, равным (АВ - ОА) =400-100=300 сделать засечку на траектории движения точки В.
Крайние положения точки В определяют ход ползуна кривошипно-шатунного механизма.
Имея 6÷8÷12 положений звеньев механизма, можно построить траектории положения любой точки любого звена, например центра тяжести S шатуна АВ. Положение точки S определяем делая засечки на прямых А1В1, А2В2, …, А8, В8 дугами радиуса АS из точек А1, А2, А3, …, А8. Соединив последовательно полученные точки S0, S1, S2,..., S8 плавной кривой, получим траекторию точки S за один оборот кривошипа.
Построение положения звеньев кривошипно-балансирного механизма и определение положений характерных точек выполняется аналогично КШМ, рассмотренному выше. По заданным координатам определить на чертеже положение неподвижных точек ОО1. Затем провести окружность радиуса ОА и отметить на них восемь положений (А1, А2,…, А8) точки А ведущего звена, для которых требуется определить положение всех звеньев механизма. Положения остальных звеньев механизма, соответствующие заданным положениям ведущего звена ОА, определяем методом засечек.
Точка В движется по дуге окружности радиуса ВО1 и всегда находится на этой дуге. Положение точек В1, В2, …, В8, соответствующие заданным положениям звена ОА1, ОА2, …, ОА8 получим на пересечении дуги с дугой окружности радиуса АВ, описанной из точек А1, А2, …, А8. Соединив точки В1, В2, …, В8 с точками А1, А2, …, А8 и О1 получим положение звеньев АВ и ВО1 (рис. 2).
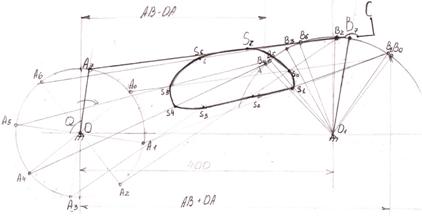
Рис. 2
Построение кинематических диаграммКинематической диаграммой называется кривая в прямоугольной системе координат, представляющая зависимость какого-либо параметра движения звена от времени или угла поворота ведущего звена.
Выражение зависимости параметров движения звеньев в виде графиков дает возможность наглядно представить их изменение за определенный промежуток времени.
Построим кинематическую диаграмму перемещения, изменения скорости и ускорения точки В кривошипно-балансирного механизма.
Для построения необходимо:
1. Выбрать произвольную прямоугольную систему координат s/t.
2. На оси абсцисс отложить время t одного оборота кривошипа ОА и разделить полученный отрезок на 6÷8÷12 равных частей.
3. Из каждой точки деления оси абсцисс в направлении оси ординат отложить перемещение точки В, которые определяем из рис.1 за соответствующий промежуток времени (угла поворота кривошипа ОА). За начало отсчета перемещения точки В принимаем одно из крайних положений В0, В4.
4. Соединить плавной кривой полученные точки.
Это и будет диаграмма перемещения ползуна (приложение2).
Для построения диаграммы скорости точки В необходимо продифференцировать закон S = f (t). Строится диаграмма методом графического дифференцирования диаграммы перемещения точки В.
Для этого необходимо:
1. Выбрать прямоугольную систему координат v/t.
2. По оси абсцисс отложить в том же масштабе время t одного оборота кривошипа ОА.
3. На отрицательной части оси абсцисс выбрать точку Р в качестве полюса диаграммы скорости. Расстояние РО выбирается произвольно, учитывая, что величина отрезка РО влияет на высоту диаграммы скорости - чем больше РО, тем выше диаграмма.
4. Провести касательные к соответствующим точкам диаграммы перемещения (1', 2', 3', …, 8').
5. Через полюс Р провести прямые, параллельные касательным диаграммы перемещения до пересечения с осью ординат. Точки пересечения с осью параллельно перенести на ординаты соответствующих точек деления оси абсцисс.
6. Соединить плавной кривой полученные точки.
Имея диаграмму скоростей v/t, аналогично строим диаграмму тангенциальных ускорений, представленную в приложение 2.
Построение планов скоростей и ускорений кривошипно-балансирного механизма
На рис.3 представлена кинематическая схема механизма. Требуется построить планы скоростей и ускорений в заданном его положении, если известны размеры звеньев и значение угловой скорости ведущего звена.
Рис. 3
Для определения скоростей точек звеньев проанализируем движение шарнира А ведущего звена. Кривошип ОА совершает вращательное движение, следовательно, скорость точки А определяется по формуле:
vA = ω1 · lOA = (πn/30) · lOA (м/c) =9,62;
где ω1 - угловая скорость ведущего звена (рад/с),
n = 920 число оборотов вращения кривошипа (об. /мин),
lOA = 0,1 длина кривошипа ОА (м).
Для определения скорости точки В шатуна АВ, совершающего плоскопараллельное движение, разложим это движение на переносно-поступательное вместе с точкой А и относительно-вращательное движение точки В вокруг точки А. Тогда, как известно из теоретической механики, имеем:
![]() В =
В = ![]() пер. пост +
пер. пост + ![]() отн. вращ,
отн. вращ,
но:
![]() пер. пост =
пер. пост = ![]() А,
А, ![]() отн. вращ =
отн. вращ = ![]() ВА,
ВА,
и рассмотрим векторное уравнение по величине и направлению:
![]() В =
В = ![]() А +
А + ![]() ВА
ВА
| Значение | - | (πn/30) · lОА | - |
| Направление | ┴ВО1 | ┴ОА | ┴АВ |
Решением этого векторного уравнения является план скоростей.
Построение плана скоростей производится в следующей последовательности:
1) в плоскости чертежа произвольно выбираем точку Р в качестве полюса плана;
2) из полюса Р проводим прямую, перпендикулярную кривошипу ОА, откладываем на ней отрезок Ра, который изображает в выбранном масштабе 1: 100 см скорость точки А,;
3) из точки а проводим прямую, перпендикулярную шатуну АВ; это направление вектора ![]() ВА;
ВА;
4) через полюс Р проводим прямую, перпендикулярную звену ВО1 до пересечения с прямой, перпендикулярной шатуну АВ, точку пересечения обозначим b.
Фигура Раb является планом скоростей механизма (приложение 3а).
Отрезок Рb изображает в выбранном масштабе абсолютную скорость точки В, которая определена из плана скоростей:
![]() В = Рb · Kv=9,2 Kv,
В = Рb · Kv=9,2 Kv,
где Kv=0,01 - масштаб скоростей (1: 100).
Отрезок ab изображает в том же масштабе скорость относительно-вращательного движения ![]() ВА; величина этой скорости:
ВА; величина этой скорости:
![]() ВА = ab · Kv=3 Kv.
ВА = ab · Kv=3 Kv.
Угловая скорость относительно-вращательного движения:
ωВА = ![]() ВА / lАВ. =3/0,4=7,5
ВА / lАВ. =3/0,4=7,5
Для определения абсолютной скорости шатуна воспользуемся методом подобия; следуя этому методу, точка определяется на отрезке ab из соотношения
АВ/ab = AS/as = BS/bs; 400/3 = 250/as = 60/bs откуда: as=1,875; bs=0,45
PS = ![]() S = 8,1
S = 8,1
- абсолютная скорость точки S.
Определяем ускорения точек механизма методом планов ускорения. Находим ускорение точки А кривошипа, так как кривошип вращается равномерно, точка А будет иметь только нормальное (центростремительное) ускорение:
āА = āпер. пост = ω² · lОА = ![]() А2/lОА=9,622/0,1=925,4
А2/lОА=9,622/0,1=925,4
Точка В принадлежит шатуну АВ, который совершает плоскопараллельное движение, разложив его на переносно-поступательное вместе с точкой А и относительно-вращательное движение точки В вокруг точки А, получаем:
āВ = āА + āВА + āВА
| Величина | - | v2А/lОА | v2ВА/lАВ | - |
| Направление | - | // ОА от А к О | // АВ от В к А | ┴ АВ |
Решить данное векторное уравнение нельзя, так как два вектора неизвестны по величине, а один из них неизвестен и по направлению.
Поэтому составляем второе векторное уравнение.
Рассмотрим точку В как принадлежащую балансиру ВО1; тогда ускорение точки В определяется:
āВ = āВ + āВ
| Значение | - | v²В/ lВО1 | - |
| Направление | - | // ВО1 от В к О1 | ┴ ВО1 |
Решением двух векторных уравнений является план ускорений.
Для того чтобы построить план ускорений, необходимо:
1) в плоскости чертежа выбрать точку π в качестве полюса плана;
2) из точки π провести прямую, параллельную ОА, и отложить на ней отрезок πа, равный в выбранном масштабе ускорению точки А;
3) из точки а провести прямую, параллельную шатуну АВ, и отложить на ней отрезок аn, равный и параллельный ускорению аВА;
4) через точку n провести прямую, перпендикулярную шатуну АВ;
5) из полюса π провести прямую, параллельную ВО1 и отложить на ней отрезок πm, равный в выбранном масштабе 1: 100
āв = ω² · lВО1 = ![]() в2/lВО1=9,22/0,15=564,3;
в2/lВО1=9,22/0,15=564,3;
6) через точку m провести прямую, перпендикулярную ВО1, до пересечения с прямой, перпендикулярной АВ, точку пересечения обозначить b;
7) полюс π соединяем прямой с точкой b. Отрезок πb равен в выбранном масштабе āВ;
8) точки а и b соединяем прямой, отрезок аb равен в выбранном масштабе ускорению āВА (приложение 3б).
Для определения ускорения точки S2 найдем ее расположение на отрезке аb из соотношения:
![]()
![]() откуда āS2=2,875;
откуда āS2=2,875;
πS2 = āS2 - абсолютное ускорение точки S2.
Чтобы определить ускорение точки S3, найдем ее расположение на отрезке πb из соотношения:
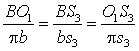 .
.
 откуда bS3=2,4
откуда bS3=2,4
πS3 = bS3 - абсолютное ускорение точки S3.
Угловое ускорение относительно вращательного движения равно:
 .
.
Кинетостатический анализ механизма
Определим давление во всех кинематических парах и уравновешивающую силу, приложенную к шарниру А кривошипа кривошипно-балансирного механизма.
Решение:
1. Строим планы скоростей и ускорений механизма
2. Определяем силы инерции и моменты сил инерции для звеньев механизма. Знак минус показывает, что направление силы или момента сил противоположно ускорению.
Звено АВ совершает плоскопараллельное движение, и действие сил инерции для него сводится к силе и моменту сил инерции:
Ри2 = -J2/q · as=-50/100*2,875=-1,44;
Ми2 = -Js · εВА = -Js · (аВА / lАВ) =-0,45.
Сила Ри2 направлена в сторону, противоположную направлению ускорения аs2. Момент инерции Ми2 - в сторону, противоположную направлению углового ускорения εВА, а εВА направлено в ту же сторону, что и касательное ускорение аВА.
Заменим силу инерции Ри2 и момент сил инерции Ми2, действующие на шатун АВ, одной результирующей силой.
Для этого момент инерции Ми2 заменяем парой сил, где в качестве силы пары берем силу, равную Ри2. Одну из сил пары прикладываем к центру тяжести и направляем ее по линии действия Ри2 в противоположную сторону.
Определяем плечо силы из соотношения:
Ми2 = Ри2 · h
h = Ми2/Ри2 = Ми2/Ри2=0,3, так как Ри2 = Ри2.
Звено В (ползун) совершает поступательное движение, поэтому действует только сила инерции
Ри3 = -mAB = - (J3/g) · aB. =-0,66
3. Определяем силы давления в кинематических парах (рис. 16):
а) для определения сил давления в кинематической паре 3-4 выделим группу Ассура и рассмотрим ее равновесие.
Поскольку группа отсоединена от механизма, действие отброшенных частей последнего звена группы нужно заменить силами. Как действуют эти силы, пока не известно, поэтому изображаем их произвольно. Вектор Q1-2 - сила действия звена 1 на звено 2, вектор Q4-3-сила действия звена 4 на звено 3.
Согласно принципу Д’Аламбера, анализируемая группа находится в состоянии равновесия. Можно к ней применить уравнение и определить неизвестные силы.
ΣРi = Ри2 + J2 + Ри3 + Рсопр + J3 + Q1-2 + Q4-3 = 0
Так как группа Ассура находится в равновесии, то алгебраическая сумма моментов всех сил относительно А равна нулю.
ΣМА = Ри2 · h1 - J2 · h2 + Q4-3 · h3 - J3 · h3 + (Ри3 + Рсопр) · h4 = 0
Из этого уравнения выразим Q4-3:

Если в результате арифметических действий Q4-3 окажется со знаком минус, то это значит, что направление силы выбрано ошибочно и его надо изменить на обратное.
Определив силу Q4-3, определяем силу давления в кинематической паре 1-2, построив для этого план сил. Для этого из произвольно выбранного полюса Н последовательно откладываем векторы сил в выбранном масштабе
Величину силы Q1-2 определяем из плана сил. Для этого замеряем вектор Q1-2 и умножаем на масштаб.
Из принципа возможных перемещений вытекает, что сумма моментов сил, приложенных к повернутому плану скоростей относительно полюса Р, равна нулю.
Составим уравнение моментов сил
Ри2 · h1 + Рур · Ра - J2 · h2 - (Ри3 + Рс) Рb = 0.
Из этого уравнения следует:
Похожие работы
... и прототипа представлены в табл.3.1.Таблица 3.1.№ Наименование и размерность показателей Обознач-ие показателя Проектируемый двигатель Прототип (ЗАЗ-968М) 1 Диаметр цилиндра, мм D 80 76 2 Литраж, л i*Vh 1,385 1,197 3 Число цилиндров i 4 4 4 Степень ...
0 комментариев