БЕЛОРУССКИЙ ГОСУДРАСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра ЭТТ
РЕФЕРАТ
На тему:
"Помехи и их классификация. Задача обнаружения и методика ее решения"
МИНСК, 2008
Помехи и их классификация.
Решение всех задач (обнаружение, распознавание-различение, измерение параметров сигнала) всегда затрудняется наличием помех искусственного или естественного происхождения. С точки зрения характера воздействия помех на работу систем и принципов их защиты помехи целесообразно разделить на группы: шумы, мешающие излучения и мешающие отражения. Как и сигналы, помехи являются электромагнитными полями и характеризуются пространственной, поляризационной и временной структурой. Однако, как и в случае с сигналами сосредоточим внимание только на их временной структуре.
Внутренние шумы приемных устройств, а также внешние активные шумовые помехи, преднамеренно создаваемые для противодействия работе РТС, имеют подобные временные структуры и поэтому рассматриваются объединение.
Шум (мешающие излучения) представляет собой нормальный случайный процесс с флуктуирующей амплитудой и фазой:
h(t) = H(t) exp(iω0t) = xh(t) + iyh(t),
где H(t) - комплексная огибающая шума
xh(t), yh(t) - квадратурные составляющие шума.
Одна из квадратурных составляющих шума показана на рис.1 Корреляционная функция шума является результатом статистического усреднения
![]()
где σш2 - средняя мощность шума,
rш(τ) - нормированная корреляционная функция шума.
Заметим, что средние значения шума, его комплексной огибавшей и квадратурных составляющих равны нулю:
![]()
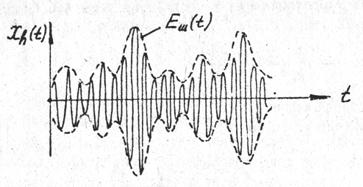
Рис.1. Одна из квадратурных составляющих шума.
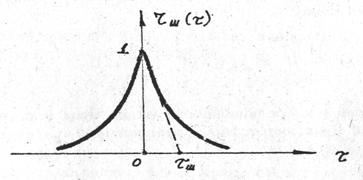
Рис.2. Нормированная корреляционная функция шума.
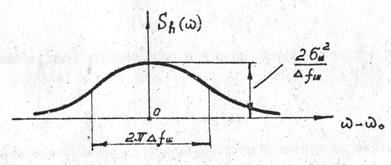
Рис.3. Энергетический спектр шума.
Нормированная корреляционная функция шума чаще всего аппроксимируется экспонентой (рис.2):
![]()
где τш - время корреляции шума.
Энергетический спектр шума
есть смещенный по частоте на величину несущий ω0 энергетический спектр флуктуации шума:
При экспоненциальной корреляционной функции шума энергетический спектр флуктуации шума имеет форму резонансной кривой одиночного колебательного контура (рис.3):
Ширина спектра шума обратно пропорциональна удвоенному времени корреляции:
∆fш = 1/2τш
Отношение средней мощности шума к ширине спектра называется спектральной плотностью шума:
N0 = σш2/∆fш
Практически ширина спектра шума всегда превосходит ширину спектра сигнала и полосу пропускания устройств обработки сигнала ∆fш >> ∆f0. Это означает, что в интересующем нас диапазоне частот можно пренебречь некоторым изменением энергетического спектра шума, считая его равномерным:
Равномерный энергетический спектр является полезной математической идеализацией спектров. Случайный процесс с равномерным спектром называют белым шумом по аналогии с белым светом, имеющим сплошной и приблизительно равномерный спектр в пределах видимой его части (рис.4).
Корреляционная функция белого шума, являясь обратным преобразованием Фурье энергетического спектра, равна

т.е. представляет собой дельта-функцию, а нормированная корреляционная функция для белого шума (рис.5):
Таким образом, белый шум характеризуется тем, что его значения в любые два сколь угодно близких момента времени не коррелированы.
Вероятностные характеристики шума описываются многомерной плотностью вероятности совокупности его дискретных значений, взятых с интервалом времени ∆t >> τш. При этом корреляционные свойства его дискретных значений описываются символом Кронекера δkl:
![]()
где
При этом определитель корреляционной матрицы шума и элементы обратной корреляционной матрицы шума описываются следующими выражениями:
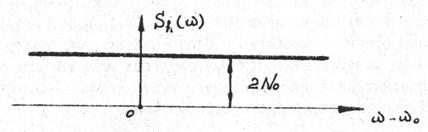
Рис.4. Энергетический спектр белого шума.
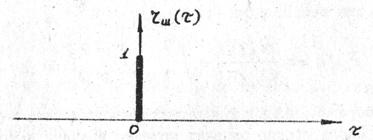
Рис.5. Нормированная корреляционная функция белого шума.
где L - число дискретных значений шума на некотором интервале наблюдения.
Многомерная плотность вероятности шума оказывается произведением соответствующих плотностей вероятности для различных дискретных значений шума:
что оказывается следствием независимости дискретных значений шума. Одномерные распределения квадратурных составляющих, амплитуды, фазы и мгновенной мощности шума аналогичны соответствующим распределениям для принятого сигнала.
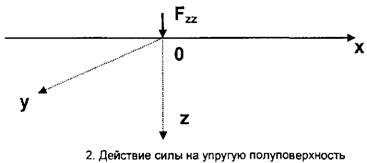
Мешающие отражения являются результатом наложения нерегулярно возникающих элементарных сигналов стандартной формы со случайной фазой и амплитудой, и поэтому представляют собой случайный процесс с нормальным (гауссовым) распределением вероятности мгновенных значений. Если при отражении сигнала от объекта с малыми размерами можно пренебречь "размыванием" закона модуляции, то при отражении от протяженного - говорить о форме сигнала, похожей на форму зондирующего сигнала нельзя.
Задача обнаружения и методика ее решения.
Введение в теорию обнаруженияВ отсутствие помех особой проблемы принятия решения о наличии или отсутствии объекта наблюдения не возникает, так как наличие или отсутствие сигнала на входе приёмника достоверно свидетельствует о наличии или отсутствии объекта (источника сигнала) в соответствующем участке пространства Наблюдения. Однако из-за наличия помех, флуктуации сигнала и ограниченного времени наблюдения процесс принятия решения сильно затрудняется. Задача обнаружения становится статистической, т.е. предполагает "угадывание". Решение не может быть достоверным. Оно принимается с той или иной вероятностью ошибки, определяющей качество обнаружения.
Постановка задачи. Показатели качества обнаружения.
В результате процесса обнаружения должно быть принято решение о наличии или отсутствии сигнала:
- решение A1* - есть сигнал,
- решение А0* - нет сигнала.
Эти решения могут быть приняты при двух взаимно исключающих условиях, которые при выработке решения неизвестны:
- условие A1 - есть сигнал,
- условие А0 - нет сигнала.
При обнаружении возможны 4 ситуации совмещения случайных событий "решения" и "условия":
- ситуация А1* А1 - правильное обнаружение,
- ситуация А0* А1 - пропуск сигнала,
- ситуация А1* А0 - ложная тревога,
- ситуация А0* А0 - правильное необнаружение.
Каждому решению соответствует некоторая плата-цена Cjk:
- цена правильного обнаружения С11,
- цена пропуска сигнала С01,
- цена ложной тревоги С10,
- цена правильного не обнаружения С00.
Естественно считать, что цена любого ошибочного решения больше цены соответствующего правильного решения:
С01 > C11, C10 > C00,
Более того, цена правильных решений должна быть отрицательной:
С11 < 0, С00 < 0.
Действительно, если за ошибочные решения наблюдатель должен расплачиваться, то за правильные решения он должен вознаграждаться. В этом и состоит смысл отрицательной цены правильных решений.
При обнаружении хотелось бы обеспечить и максимальные вероятности правильных решений (правильное обнаружение, правильное не обнаружение), и минимальные вероятности ложных решений (пропуск сигнала, ложная тревога). Однако, эти требования противоречивы. Чтобы обеспечить разумный компромисс, выбирают такое правило решения, при котором для совокупности всех возможных ситуаций обеспечивались бы наилучшие результаты, т.е. правило решения должно быть оптимальным в среднем, статистически, Для этого вводит понятие среднего риска (средней платы), который является взвешенной суммой цен (плат) всех ситуаций, причём весовыми коэффициентами являются вероятности этих ситуаций:
R = C11 P(A1*A1) + C01 P(A0*A1) + C10 P(A1*A0) + C00 P(A0*A0).
Наилучшей или оптимальной системе обнаружения будем считать такую, которая обеспечивает минимум среднего риска.
Известно, что вероятность совместного наступления событий А и В, записываемая как Р(АВ), может быть представлена через априорные и условные вероятности этих событий:
Р(АВ) = Р(А) * Р(В/А) = Р(В) * Р(А/В).
Следовательно, средний риск может быть представлен следующим образом:
R = C11 P(A1) P(A1*/A1) + C01 P(A1) P(A0*/A1) + C10 P(A0) P(A1*/A0) + C00 P(A0) P(A0*/A0)
Условные вероятности, представленные в данном выражении, носят в статистической теории обнаружения специальные названия и имеют специальные обозначения:
D = P(A1*/A1) - условная вероятность правильного обнаружения, т.е. вероятность принять решение о наличии сигнала, когда сигнал есть;
D^ = P(A0*/A1) - условная вероятность пропуска сигнала, т.е. вероятность принять решение об отсутствии сигнала, когда сигнал есть;
F = P(A1*/A0) - условная вероятность ложной тревоги, т.е. вероятность л принять решение о наличии сигнала, когда сигнала нет;
F^ = P(A0*/A0) - условная вероятность правильного необнаружения, т.е. вероятность принять решение об отсутствии сигнала, когда сигнала нет.
Поскольку соответствующие одному и тому же условию А1 или А0 решения А1* и А0* взаимно исключающие, то
D + D^ = 1, F + F^ = 1.
Отметим также, что наличие и отсутствие сигнала составляют полную группу событий, так что априорные вероятности этих событий удовлетворяют условию
P(A1) + P(A0) = 1
С учетом введённых обозначений выражение среднего риска можно представить в виде
 где
где
Полученное выражение свидетельствует о том, что минимуму среднего риска соответствует максимум взвешенной разности условных вероятностей правильного обнаружения и ложной тревоги
minR → max(D – l0F),
причём весовой множитель l0 зависит от априорных вероятностей наличия и отсутствия сигнала и соотношения цен (плат) за правильные и ошибочные решения.
Отношение правдоподобия. Правило решения.Рассмотрим постановку задачи оптимального обнаружения реальных сигналов, которые являются функциями времени. Напомним, что пространственные и поляризационные характеристики сигналов и помех пока не рассматриваются, всё внимание сосредоточено только на их временных характеристиках.
Принятый сигнал f(t) может состоять из сигнала m(t) и помехе n(t)
f(t) = m(t) + n(t) → условие А1,
либо сводиться только к помехе
f(t) = n(t) → условие А0.
Задача заключается в том, чтобы указать правило решения, которое бы "наилучшим" образом позволило на основании принятого сигнала f(t) решить, какое из двух условий (А1 или А0) верно.
Пусть принятый сигнал f(t) характеризуется плотностью вероятности p1(f) при условии А1 и плотностью вероятности p0(f) при условии A0. Если вместо непрерывной функции f(t) рассматривать L дискретных значений £1, f2, …, fL то функции p1(f) и p0(f) являются 2L - мерными распределениями вероятностей, что более подробно следует записать так:
Выбор правила решения заключается в разбиении 2L - мерного пространства f1, f1*, …, fL, fL* на такие две области Г1 и Г0, когда при попадании точки в область Г1 выносится решение о верности условия А1, а при попадании в область Г0 - решение о верности условия А0. Подобное разбиение схематически изображено на Рис.6 для случая 2L = 2.
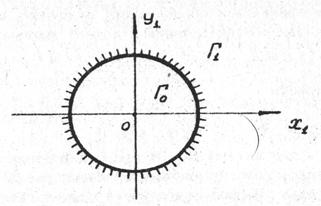
Рис.6. Схематическое разбиение двумерного пространства решения на области Г1 и Г0.
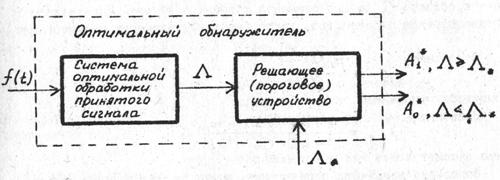
Рис.7. Структура оптимального обнаружителя.
Учитывая введённые определения и обозначения, получаем соотношения для вероятностей правильного обнаружения и ложной тревоги

а также для среднего риска

Минимум среднего риска достигается при минимуме интеграла. Первое слагаемое в подынтегральном выражении положительно, а второе - отрицательно, т. к. С10 – С00 > С01 – С11 > 0. Если выбрать область Г1 так, чтобы выполнялось условие
![]() или
или 
то величина R будет минимальна.
Отношение  называется отношением правдоподобия.
называется отношением правдоподобия.
Величину можно рассматривать как некоторый порог.
можно рассматривать как некоторый порог.
Используя введенные определения, можно сформулировать правило решения в следующем вице (так называемое, байесово правило выбора решений): для принятия решения о наличии или отсутствии полезного сигнала (объекта наблюдения) надо вычислить отношение правдоподобия ![]() принятого сигнала f(t) сравнить его с порогом
принятого сигнала f(t) сравнить его с порогом ![]() :
:
если ![]() >
> ![]() *, то принимается решение А1*,
*, то принимается решение А1*,
если ![]() <
< ![]() *, то принимается решение А0*.
*, то принимается решение А0*.
Отношение правдоподобия (или любая монотонная функция его) является отражением структуры оптимальной системы обработки принятого сигнала в структуре оптимального обнаружителя (рис.7).
Отношение правдоподобия представляет собой математическое олицетворение физического устройства, применяемого для обработки принятого сигнала. Одной из главных задач синтеза системы обнаружения является определение облика системы оптимальной обработки принятого сигнала, т. в. интерпретация математических операций, содержащихся в выражении отношения правдоподобия (усиление, задержка, умножение, сложение, вычитание, интегрирование, дифференцирование, возведение в степень), при помощи физически реализуемых аналоговых, цифровых или оптических элементов.
Выработка решения сводится лишь к испытанию на порог напряжения на выходе системы обработки принятого сигнала.
Выбор порога решенияРазличают различные критерии выбора порога решения. Остановимся на двух из них.
Критерий идеального наблюдателя.
Под "идеальностью" наблюдателя подразумевается “бескорыстность” выполнения задачи - стоимость правильных решений принимается равной нулю, т.е. наблюдатель не вознаграждается за принятые правильные решения:
Соо = С11 = 0,
а также одинаковая "нетерпимость" к ошибочным решениям - стоимость пропуска цели и ложной тревоги одинаково высоки:
С01 = С10 = 1.
При этом средний риск равен суммарной вероятности ошибки
R = Р(А0) F + Р(A1) D^,
а порог определяется только априорными вероятностями наличия или отсутствия сигнала (объекта наблюдения)
![]() = P(A1) /P(A1)
= P(A1) /P(A1)
Критерий Неймана - Пирсона.
Согласно этому критерию порог выбирают исходя из требуемой фиксированной вероятности ложной тревоги
![]() → F = const.
→ F = const.
При этом выбор пространства решения Г1 должен минимизировать вероятность пропуска D^ или максимизировать вероятность правильного обнаружения D. Нейман и Пирсон показали, что в этом случае сохраняется правило решения байесового типа:
если  то
то ![]() .
.
Таким образом, если “идеальный наблюдатель” исходит из минимизаций полной вероятности ошибки, то "наблюдатель Неймана - Пирсона" исходит из минимизации только вероятности пропуска сигнала при фиксированной вероятности ложной тревоги. И система Неймана-Пирсона, и система идеального наблюдателя принадлежат к байесову классу систем, связанных с испытанием на порог отношения правдоподобия и минимизирующих средний риск.
ЛИТЕРАТУРА
1. Охрименко А.Е. Основы извлечения, обработки и передачи информации. (В 6 частях). Минск, МРТИ, 2004.
2. Медицинская техника, М., Медицина 1996-2000 г.
3. Сиверс А.П. Проектирование радиоприемных устройств, М., Радио и связь, 2006.
4. Чердынцев В.В. Радиотехнические системы. – Мн.: Высшая школа, 2005.
5. Радиотехника и электроника. Межведомств. темат. научн. сборник. Вып. 22, Минск, БГУИР, 2004.
Похожие работы

... м от зоны обнаружения - крупных деревьев. К настоящему времени для охраны объектов, периметров и рубежей разработаны комплексы охранной сигнализации, включающие в свой состав станционную аппаратуру управления и отображения информации, а также определенную номенклатуру средств обнаружения. Вновь создаваемые ССО предназначены для расширения функциональных возможностей этих комплексов, в том числе ...
... развитие логического мышления учащихся является одной из основных целей курса геометрии. При изучении геометрии развитие логического мышления учащихся осуществляется в процессе формирования понятий, доказательства теорем, решения задач. При изучении геометрических построений, прежде всего, приходится преодолевать трудности логического порядка. В условиях школы для преодоления этих трудностей ...
... специалистов, обладающих указанной совокупностью знаний и выполняющих функции “посредников” между экспертами в предметной области и компьютерными (экспертными) системами. Они получили название инженеры знаний (в оригинале - knowledge engineers), а сам процесс разработки ЭС и других интеллектуальных программ, основанных на представлении и обработке знаний - инженерией знаний (knowledge engineering ...

... также невысока и обычно составляет около 100 кбайт/с. НКМЛ могут использовать локальные интерфейсы SCSI. Лекция 3. Программное обеспечение ПЭВМ 3.1 Общая характеристика и состав программного обеспечения 3.1.1 Состав и назначение программного обеспечения Процесс взаимодействия человека с компьютером организуется устройством управления в соответствии с той программой, которую пользователь ...
0 комментариев