КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ им. А.Н.ТУПОЛЕВА
Факультет КиПЭВА
Практическая работа дисциплине
"Проектирование центральных и периферийных устройств"
Тема: "Проектирование запоминающего модуля на сменном оптическом носителе"
Выполнил: студент
гр.4314 Назипов Э
Казань 2007
Содержание
1. Задание
2. Анализ задания, конструирование модели, описание конструкции
2.1 Информация о DVD
2.2 Конструирование ОН
2.3 Электродвигатель вращения
2.4 Анализ системы привода ОГ
2.5 Конструирование привода ОГ
2.6 Конструирование привода каретки
2.7 Модель ЗМСОН
3. Расчеты
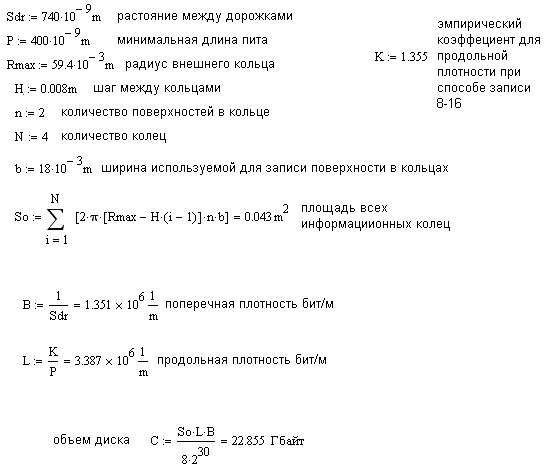
3.1 Информационной ёмкости и плотности записи
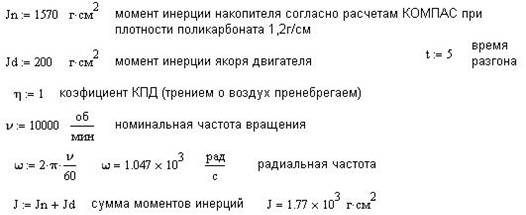
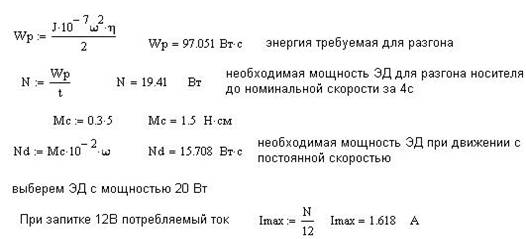
3.2 Электродвигателя вращения
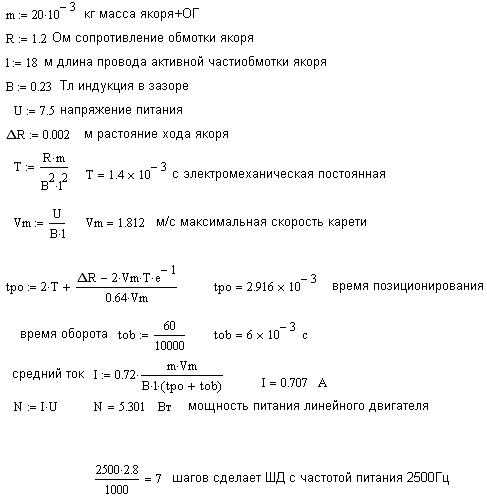
3.3 Электродвигателя позиционирования и ШД
3.4 Диаграммы расположения данных и метода записи
1. Задание
Кинематическая схема: в соответствии со схемой конструкции (эскиз 1 см. ниже). Встроенный ЭД вращения шпинделя, шаговый двигатель, ходовой винт, гайка, линейные двигатели, якоря на упругих мембранах.
Параметры: информационная ёмкость 60 Гигабайт; число каналов записи-воспроизведения – 8; число рабочих поверхностей – 8; число матричных оптических головок на каждой поверхности – 2; скорость вращения 10 000 об/мин; время доступа – не более 3 мсек; способ записи RLL 8-16 3,9, D=120мм; b=25мм; Объем выпуска: 500 тыс/год
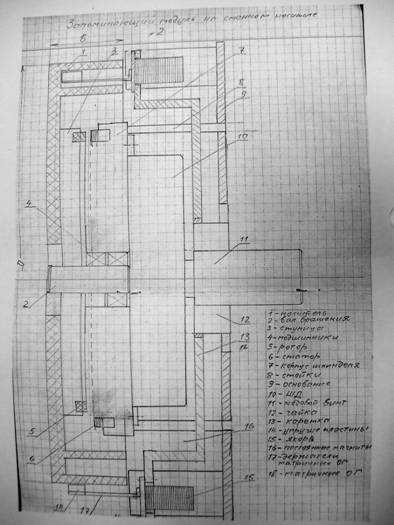
Эскиз 1
2. Анализ задания
Сменный оптический носитель, который необходимо сконструировать для нашего ЗМСОН, представляет собой измененный по конструкции стандартный оптический носитель. Следовательно можно и нужно (ввиду отработанной технологии производства) взять за основу физические параметры конструкции, способа изготовления и способ записи существующего ОН стандарта DVD.
2.1 Краткие сведения о DVD
Оптический носитель выполняется в форме диска. Наружный диаметр 120 мм, внутренний 15 мм, толщина 1,2 мм. Основа выполняется из поликарбоната (плотность 1,2 гр/см^2). Информационный слой состоит из углублений металлизированных отражающим металлом толщиной 50-100 нм. Этот слой формируется при изготовлении на производстве методом штамповки.
Для защиты используется лаковое покрытие. В случае двустороннего DVD используются две половинки толщиной 0,6мм. В таком случае информационные слои расположены в центре диска и читаются с разных сторон. Длина волны используемого лазера 650/635нм, шаг между дорожками 0,74 мкм, а минимальная длина пита 0,4 мкм. Способ записи RLL 8-16. Ориентировочная площадь поверхности используемой под хранение информации 0,008822 м^2 одной стороны (из расчета Rmax=57мм Rmin=21мм S=π*(Rmax^2-Rmin^2)) 0,018 м^2 для двухстороннего DVD. Объем V = 13359 мм^3. Масса M = 16 г. Момент инерции 293 г*см^2.
2.2 Конструирование ОН
По заданию нам необходимо создать ОН диаметром 120 мм где рабочие поверхности расположены на боковых кольцах. Ширина ОН должна составлять 25 мм. Число рабочих поверхностей 8. Скорость вращения 10000 об/мин.
Исходя из всей информации, я спроектировал ОН следующей конструкции:
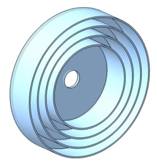
Боковой диск, на котором крепятся кольца, имеет внешний радиус 60мм внутренний 7,5мм (как у DVD диска) толщину 2,5мм. Сбоку прикреплены 4 кольца толщиной 1,2 мм (как у DVD диска) с двумя рабочими поверхностями – внутренней и внешней. Шаг между внешними радиусами (и соответственно внутренними) составляет 8мм. Расчетная масса 72 г. Момент инерции 1570 г*см^2.
Теоретический способ изготовления основы - литье в профиль аналогично обычным дискам. Разумно полагать, что стоимость изготовления, как по критерию сложности/точности, так и по критерию объем /информационная площадь значительно больше, нежели у DVD. Способ формирования информационного слоя не известен. Возможность применения штамповки ввиду кольцевой поверхности маловероятна. Что снова ведет к подорожанию готового ОН.
Помимо этого соотношение объем конструкции/объем информации хуже относительно DVD.
2.3 Электродвигатель вращения
выполнен подобно конструкциям существующих ДВ. В расчете этого ЭД теоретической выдумкой является момент сопротивления движения ОН с номинальной скоростью, а также время разгона.


2.4 Анализ системы привода ОГ
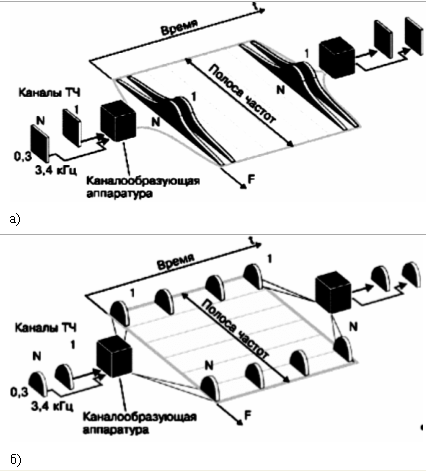
В классической конструкции ЗМСОН на основе диска, ОГ располагаются под рабочей поверхностью и перемещаются от минимальной (по радиусу расположения) дорожки к максимальной с помощью шагового двигателя и системы привода, состоящей из ходового винта, гайки и каретки. Оптическая головка и её система управления движется по направляющим, жестко соединенным с двигателем вращения диска.
Так обеспечивается простота, точность, дешевизна и надежность конструкции. На фотографиях продемонстрированы исполнения привода классического ЗМСОН.


Точной информации о параметрах ОГ не предстало возможным узнать. Но по виду нескольких приводов можно говорить о довольно сложной организации и большом занимаемом пространстве системы ОГ.
Насколько возможно полагать из работы приводов, скорость позиционирования невысока. Также из средств массовой информации, известно, что стоимость ОГ составляет больше половины всей стоимости классического ЗМСОН.
2.5 Конструирование привода ОГ
Согласно заданию, количество ОГ на поверхность должно быть 2 шт, в сумме 16 ОГ. При вышеупомянутом сравнении стоимости ОГ, такое количество кажется чрезмерным. Помимо этого, по заданию, ОГ должны перемещаться в пространствах между кольцами ОН.
Учитывая размеры существующих ОГ, это сложно организовать, но в качестве теоретического эксперимента, я представил, что существует ОГ с конечными размерами 3,5*4*5мм. В таком случае их возможно свободно размещать в полостях ОН.
Согласно этой выдумке, возможно осуществлять запись на информационных дорожках начиная с расстояния 3 мм от бокового диска и заканчивается на расстоянии 1,5 мм от края колец. В этом случае информационное кольцо будет иметь ширину 18мм.
Теоретически привод ОГ мог бы выглядеть так (размеры в граф.части):

Две головки делят информационное кольцо на две половины по 9мм и передают биты через один канал записи-воспроизведения. Четыре ОГ работают с одним кольцом на одном радиусе, поэтому возможно управлять их частотой и позиционированием одновременно. Ход привода ограничен возможностями линейного двигателя позиционирования, и в данном случае составляет 3мм. Остальной ход обеспечивает шаговый двигатель.
В этом проекте я применяю ШД с шагом 30 градусов, и с помощью привода ходового винта с кареткой обеспечиваю смещение всех ЛДП на 1мм. ЛДП и ШД могут работать одновременно. Это свойство я использовал в расчете ЛДП по критерию времени позиционирования.
Но даже с учетом теоретического перемещения каретки шаговым двигателем на 7мм за 2,8 мсек, расчетные параметры ЛДП не кажутся физически реализуемыми. Что еще раз говорит о сложности и нецелесообразности создания подобно ЗМСОН.
2.6 Конструирование привода каретки
Для уменьшения массы простоты изготовления я сконструировал следующую систему.
Как видно из рисунка, стойки двигателей помимо фиксации двигателей, выполняют роль направляющих для каретки. Фактически они связывают все движущиеся компоненты. От точности выполнения крепежа зависит устойчивая работа привода.
Но в сравнении с классическим ЗМСОН, вся конструкция слишком сложна и менее виброустойчива.
Ходовой винт имеет резьбу с шагом 6мм за один оборот. На каретке расположена гайка с шариковыми подшипниками, которые скользят в пазах ходового винта. За счет чего вращательное движение преобразуется в поступательное. Расчетов на силы сопротивления я не проводил. Так же как и параметры ШД они остаются неизвестными. Теоретически я предположил что ШД с стартовой частотой питания 2500Гц сможет за требуемое время позиционирования передвинуть каретку со всем грузом на необходимое расстояние (согласно расчету за 2,8мсек на 7мм).
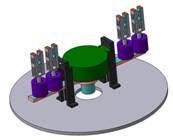
2.7 Модель ЗМСОН
В комплексе ЗМСОН выглядит так:

3. Расчеты
3.1 Информационная ёмкость и плотность записи
3.2 Электродвигатель вращения
3.3 Линейный двигатель позиционирования и Шаговый двигатель
3.4 Диаграммы расположения данных и метода записи

Похожие работы
... с применением полиграфических компьютерных технологий? 10. Охарактеризуйте преступные деяния, предусмотренные главой 28 УК РФ «Преступления в сфере компьютерной информации». РАЗДЕЛ 2. БОРЬБА С ПРЕСТУПЛЕНИЯМИ В СФЕРЕ КОМПЬЮТЕРНОЙ ИНФОРМАЦИИ ГЛАВА 5. КОНТРОЛЬ НАД ПРЕСТУПНОСТЬЮВ СФЕРЕ ВЫСОКИХ ТЕХНОЛОГИЙ 5.1 Контроль над компьютерной преступностью в России Меры контроля над ...
... для реализации системы бюджетирования Консультационной группы "Воронов и Максимов". Статья о проблемах выбора системы бюджетирования - в проекте "УПРАВЛЕНИЕ 3000". Бюджетный автомат Если вы решитесь на автоматизацию системы бюджетирования компании, перед вами сразу встанут вопросы: что выбрать, сколько платить, как внедрять. Примеряйте! О ЧЕМ РЕЧЬ В “Капитале” на стр. 44, 45 мы рассказали ...



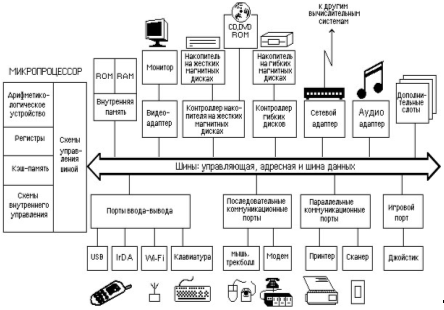
... , ППЗУ для BIOS. В качестве устройства ввода информации служит, например, клавиатура. В качестве устройства вывода – дисплей, принтер и т.д. 2 АППАРАТНОЕ УСТРОЙСТВО ПК И ИХ ХАРАКТЕРИСТИКИ Персональные компьютеры выпускаются в следующих конструктивных исполнениях: стационарные (настольные) и переносные. Наиболее распространенными являются настольные ПК, которые позволяют легко изменять ...
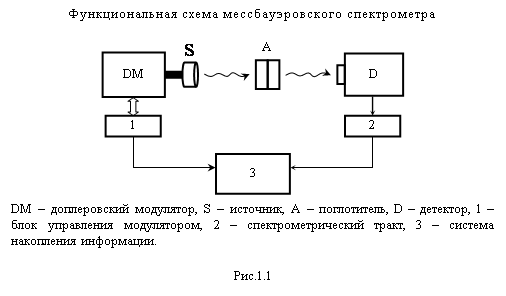
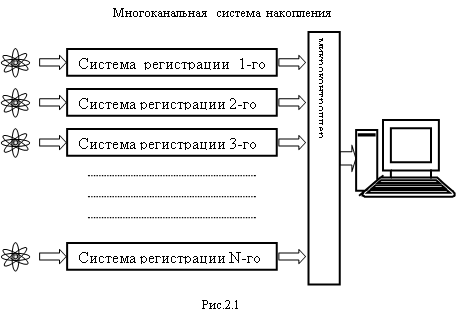
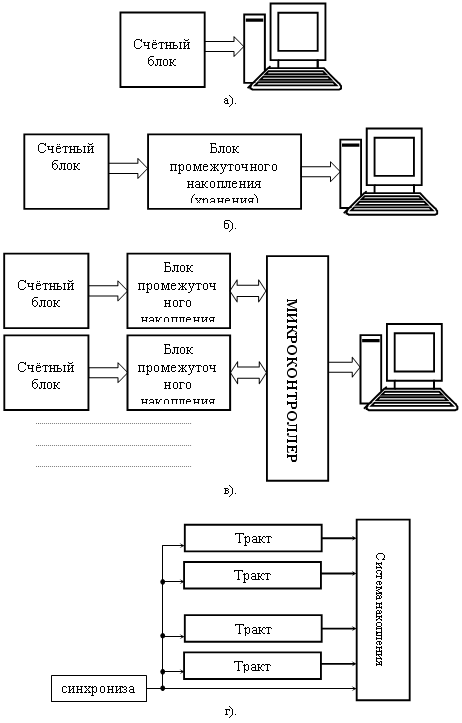
... программирование микроконтроллера, как инструмента накопления данных и управления ресурсами, с учётом необходимой и достаточной степени доступа к конечной аппаратуре. Модуль накопления для задач многомерной мессбауэровской спектрометрии спроектирован с учётом следующих условий: - Синхронизация накопителя с системой доплеровской модуляции осуществляется внешними тактовыми импульсами “старт” и ...
0 комментариев