Содержание
Введение
Аналитический обзор аэродромных РЛС
Назначение, размещение и особенности аэродромных РЛС
Нормативы ICAO для аэродромных РЛС
Расчет технических параметров РЛС
Описание упрощенной структурной схемы РЛС и принципов ее работы
Заключение
Список использованных источников
Введение
Безопасность и регулярность полетов воздушных судов, а также экономические показатели воздушного движения самолетов гражданской авиации в значительной степени определяются радиотехническими средствами обеспечения полетов. С помощью радиотехнических средств диспетчеры службы движения решают такие задачи, как управление движением ВС на земле и в полете, предотвращение конфликтных ситуаций в воздухе, обеспечение безопасных интервалов между воздушными судами в вертикальной и горизонтальной плоскостях, принятие своевременных мер по оказанию помощи экипажам при особых случаях в полете.
Среди радиотехнических средств обеспечения полетов особое место занимают радиолокационные станции (РЛС). К их характерным свойствам относятся:
высокая оперативность получения данных о координатах самолетов и дополнительной полетной информации, необходимой для УВД (номер рейса, высота, запас топлива, вектор скорости, сигналы об аварийных ситуациях);
достаточно высокая степень объективности полученных данных, поскольку субъективный фактор в радиолокационных станциях проявляется лишь на последней стадии переработки информации при считывании ее диспетчером;
полнота информации о состоянии воздушной обстановки во всей контролируемой зоне управления;
наглядность представления информации о местоположении самолетов и в некоторых случаях даже траекторий их движения, так как радиолокационное изображение воздушной обстановки на экранах индикаторов РЛС, как правило, является как бы уменьшенной моделью реального расположения самолетов в пространстве;
высокая точность и надежность наземных РЛС, поскольку условия работы аппаратуры на земле в стационарных условиях позволяют использовать резервирование, уменьшить диапазон климатических воздействий на оборудование, увеличить размеры антенн, защитить антенны от аэродинамических нагрузок, облегчить условия обслуживания аппаратуры. Потребители радиолокационной информации предъявляют к РЛС различные зачастую противоречивые требования, удовлетворить которым одновременно одна РЛС не может. Поэтому они дифференцируются по определенным группам в зависимости от функций различных служб, использующих информацию РЛС. Так существуют трассовые, аэродромные, посадочные, обзора летного поля, метеорологические и другие виды РЛС. В некоторых случаях разрабатываются радиолокационные комплексы (РЛК), совмещающие функции двух или большего числа видов радиолокационных станций.
Начало развития радиолокационных систем в России относится к тридцатым годам прошлого столетия. Непосредственным толчком к созданию радиолокационных методов обнаружения объектов послужило развитие военной авиации и возникновение в связи с этим необходимости заблаговременного обнаружения ВС противника. Этим объясняется и то обстоятельство, что основным заказчиком и потребителем радиолокационной техники и в нашей стране, и за рубежом были на первых этапах развития радиолокации различного рода военные ведомства.
Современный этап развития авиации характеризуется широким внедрением автоматизированных систем управления воздушным движением (АС УВД), использованием последних достижений вычислительной техники, более современных радиоэлектронных средств управления воздушным движением, навигации, посадки и связи, совершенствованием методов и средств технической эксплуатации авиационной техники.
Аналитический обзор аэродромных РЛС
Аэродромные обзорные РЛС (ОРЛ-А) предназначены для получения информации о воздушной обстановке, необходимой при контроле и УВД в районе аэродрома и для ввода ВС в зону действия посадочных средств. В нормах, принятых в ГА и выработанных постоянной комиссией по радиотехнической и электронной промышленности, ОРЛ-А обозначены ПРЛ-В2 и делятся на следующие классы: ПРЛ-В1 с Rmax=150 км; ПРЛ-В2 с Rmax=80 км и ПРЛ-В3 с Rmax=46 км.
Информация, получаемая с помощью аэродромных обзорных станций, используется диспетчерам аэродромных центров АС УВД, диспетчерских пунктов подхода (ДПП), главных диспетчерских пунктов подхода (ГДПП), диспетчерских пунктов круга (ДПК), диспетчерских пунктов системы посадки (ДПСП) и местных диспетчерских пунктов (МДП).
Технические характеристики аэродромных обзорных РЛС должны обеспечивать разрешающую способность и точность определения координат ЛА в соответствии с международными и отечественными нормами. Кроме того, они должны иметь эффективные средства подавления сигналов, отраженных от местных предметов и гидрометеоров. Аэродромные станции должны обнаруживать и определять местоположение целей, находящихся на небольших высотах и на близком удалении от РЛС. Требования к максимальной дальности действия аэродромных радиолокаторов дифференцируются в зависимости от конкретного назначения станции и класса аэропорта, где предполагается установить радиолокатор. Для большой интенсивности полетов необходимо использовать аэродромные обзорные радиолокаторы варианта "В 1" с дальностью действия ≈ 150 км.
В менее крупных аэропортах целесообразно устанавливать аэродромные радиолокаторы варианта "В 2" с максимальной дальностью действия ≈ 80 км. Для того чтобы обеспечить необходимой информацией диспетчера круга, достаточно в соответствии с рекомендациями ICAO иметь радиолокатор варианта "В 3" с дальностью действия ≈ 46 км.
Назначение, размещение и особенности аэродромных РЛСАэродромные диспетчерские радиолокационные станции предназначены для контроля и управлением воздушным движением в районе аэродрома и вывода воздушных судов в зону действия посадочного радиолокатора. Контроль и управление воздушным движением осуществляется на основе информации о дальности, азимуте, а также дополнительной информации о воздушных судах, получаемой с помощью радиолокационных станций и самолетных ответчиков. Эта информация должна быть полной и точной, в связи с чем аэродромные диспетчерские радиолокационные станции должны удовлетворять требованием международной организацией гражданской авиации ИКАО. Технические характеристики аэродромных РЛС должны обеспечивать разрешающую способность и точность определения координат ЛА в соответствии с международными и отечественными нормами. Кроме того, они должны иметь эффективные средства подавления сигналов, отраженных от местных предметов и гидрометеоров. Аэродромные станции должны обнаруживать и определять местоположение целей, находящихся на небольших высотах и небольшом удалении от РЛС.
Требования к максимальной дальности действия аэродромных радиолокаторов дифференцируются в зависимости от конкретного назначения станции и класса аэропорта, где предполагается установить радиолокатор.
Аэродромный РЛК располагается в сторону от оси ВПП, чтобы обеспечить минимум переотражений по вторичному каналу и ослабить влияние вредного СВЧ - излучения. Кроме того, нужно учесть, что вдоль ВПП на 120 м от оси проходит критическая зона КРМ, поэтому РЛС располагается за ее пределами (120-185м от оси ВПП, по возможности ближе к КТА).
Состав и размещение оборудования АОРЛ-85:
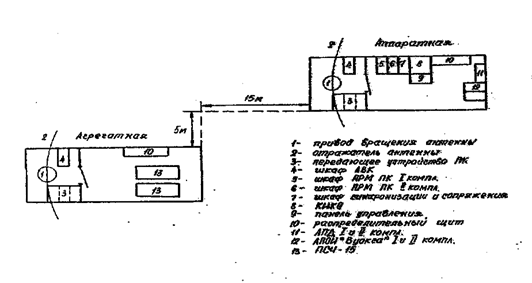
Аппаратура РЛК смонтирована в специальных контейнерах, имеющих все необходимые условия для работы аппаратуры и персонала (вентиляция, кондиционирование воздуха, освещение, пожарная и охранная сигнализация и т.д.), на позиции контейнеры монтируются в сборку из двух контейнеров, образуя единое техническое здание. Такое конструктивное решение сводит к минимуму строительно-монтажные работы на позиции. Двухлучевая антенная система с помощью специального перекрытия верхнего и нижнего лучей обеспечивает формирование зоны обзора в вертикальной плоскости в диапазоне углов от 0,5 до 45 градусов. Нижний луч, формируемый верхним облучателем и отражателем, работает как на передачу, так и на прием. Верхний луч работает только на прием. Использование информации верхнего приемного луча в ближней зоне позволяет снизить уровень помех от подстилающей поверхности примерно на 20 дБ. В горизонтальной плоскости зона обзора обеспечивается механическим вращением антенны со скоростью 12 или 15 об/мин. Зондирующие сигналы, формируемые двухканальной передающей системой, излучаются одновременно на двух несущихся на 56 Мгц, обеспечивая двухчастотный режим облучения цели. С целью обеспечения необходимого потенциала ПРЛ наряду с минимальной дальностью и высокой разрешающей способностью в каждом периоде повторения излучаются два зондирующих сигнала различной длительности: монохроматический и сложный с внутриимпульсной ЛЧМ. В состав приемной антенны входит аппаратура аналоговой и цифровой обработки сигналов, оценки параметров сигналов (карта помех), некогерентного и когерентного накопления, селекции движущихся целей, вычисления координат.
В ПРЛ организован специальный метеоканал. Прием метеоинформации в режиме работы при круговой поляризации осуществляется с ортогонального входа поляризатора верхнего облучателя антенны. Аппаратура приёма и обработки метеоканала идентична основному каналу. При работе в режиме линейной поляризации метеоинформация извлекается из нулевого доплеровского фильтра основного канала. Программно-вычислительное устройство ПРЛ производит вычисления координат ВС и формирует контуры метеооброзований в шести градациях.
Головной процессор РЛК производит объединение отметок ПРЛ и ВРЛ, трассы целей, выполняя, таким образом, функции вторичной обработки информации. Кроме того, он одновременно используется как процессор автоматизированной системы контроля и управления ЛРК. Вычислительные средства головного процессора имеют полное автоматическое резервирование и способны адаптироваться к перегрузкам.
Автоматизированная система контроля и управления (АСКУ) позволяет как с местного, так и дистанционного (например, с КДП) производить управление режимами работы РЛК, оценку технического состояния, диагностику неисправностей и автоматическую реконфигурацию комплекса (переход на резерв).
Встроенное контрольное оборудование позволяет осуществлять диагностику и поиск неисправностей до типового элемента замены. Высокая степень автоматизации РЛК наряду с его высокой надежностью обеспечивают возможность работы без постоянного присутствия на радиолокационной позиции обслуживающего персонала.
Нормативы ICAO для аэродромных РЛСЗона обнаружения. Аэродромный радиолокатор должен обнаруживать ВС с эффективной отражающей площадью 15 м2 и более, находящихся в зоне прямой видимости (из точки расположения антенны) в пределах пространства, охватываемого вращением на 360 град вокруг вертикальной оси антенны плоской фигуры. В то же время нормами ICAO рекомендуется увеличить зону обнаружения.

Точность. Погрешность в определении положения отметки цели по азимуту не должна быть больше ±2 град.
Погрешность индикации дальности не должна превышать 5% от действительного расстояния до цели или 150 м в зависимости от того, какая из этих величин больше, т.е.: σmax r ≤ 0,05 r; σmax r ≥ 150 м, где r - наклонная дальность до цели.
Для новых РЛС, спроектированных после принятия норм ICAO, погрешность индикации дальности не должна превышать 3% от действительного расстояния до цели или 150 м и в зависимости от того, какая из этих величин больше.
Разрешающая способность станции по азимуту должна быть не хуже 4 град.
Разрешающая способность по дальности должна быть не хуже 1% расстояния от антенны радиолокатора до цели или 230 м в зависимости от того, какая из этих величин больше, т.е.: δr≤ 0,01 r; δr ≥ 230 м
Скорость возобновления информации. Информация о дальности и азимуте ВС, находящимся в пределах зоны обнаружения радиолокатора, должна возобновляться не реже, чем каждые 4 с.
Основные требования ИКАО для обзорных аэродромных радиолокаторов приведены в таблице 1.
Таблица 1.
| Характеристика | Рекомендации ИКАО |
| Максимальная дальность, км | 46 |
| Вероятность правильного обнаружения | 0,9 |
| Вероятность ложных тревог | 10-6 |
| Эквивалентная площадь цели, м2 | 15 |
| Угол места, градус | 0,5-30 |
| Скорость обзора, об/мин | 15 |
| Разрешающая способность: по дальности, м по азимуту, градус | 230 или 1% от Rmax 4 |
| Погрешность измерения (СКП) дальности: по индикатору (после цифровой обработки), м | 150 или 0.03% от Rmax |
| Точность азимута по индикатору, градус | 2 |
| Коэффициент подпомеховой видимости, дБ 1 этап | Максимальный |
Эксплуатационно-технические показатели АОРЛ-85.
Первичный канал:
| № п/п | Характеристика | Единица измерения | АОРЛ-85 |
| Первичный канал | |||
| Диапазон частот | МГц | 1216...1278 | |
| Количество рабочих частот | шт | 8 | |
| Дальность действия по ВС с ЭОП 10 м2 (ТУ134, АН-72, ЯК-40) при Робн=0,8 РЛТ=10-6 на высотах от 3000 м до 7500 м | км | 100 | |
| Минимальная дальность | км | 3 | |
| Ширина диаграммы направленности антенны в горизонтальной плоскости | градусы, минуты | 2º5' | |
| Скорость вращения антенны | об. /мин | 9...11 | |
| Мощность излучаемых сигналов: средняя | кВт | 35 | |
| Мощность излучаемых сигналов: импуьсная | кВт | 0,45 | |
| Длительность излучаемого сигнала | мкс | 25 | |
| Коэффициент подавления СДЦ | дБ | 28 | |
| Коэффициент подпомеховой видимости | дБ | 18 | |
| Неравномерность скоростоной характеристики СДЦ | дБ | 10 | |
| Точные измерения координат по выходу АПОИ: по азимуту | градусы, минуты | 15' | |
| Точные измерения координат по выходу АПОИ: по дальности | метры | 250 | |
| Вторичный канал | |||
| Диапазон частот: запрос | МГц | 1030 | |
| Диапазон частот: прием | МГц | 740,1090 | |
| Дальность действия максимальная на высотах от 3000 м до 7500 м | км | 120...180 | |
| Дальность действия максимальная на высотах | км | 90 | |
| Разрешающая способность: по дальности | км | 1 | |
| Разрешающая способность: по азимуту | градусы, минуты | 15' | |
| Точность определения координят по АПОИ: по дальности | м | 250 | |
| Точность определения координат по АПОИ: по азимуту | градусы, минуты | 15' | |
| Вероятность получения дополнительной информации | 0,98 | ||
| Угол обзора в вертикальной плоскости | градусы | 45º | |
Исходные данные:
Эффективная отражающая площадь цели [кв. м] Sц = 8
Максимальная дальность действия [км] Rmax = 100
Вероятность: ПРАВИЛЬНОГО ОБНАРУЖЕНИЯ D = 0.9
ЛОЖНОЙ ТРЕВОГИ F = 1e-006
Зона обзора: по азимуту [град] Alfa = 360
по углу места [град] Beta = 35
Разрешающая способность: по дальности [метр] Delta_R = 800
по азимуту [град] Delta_A = 7
по углу места [град] Delta_B = 0
по скорости [км/ч] Delta_V = 0
Погрешность измерения: дальности [метр] Sigma_R = 250
азимута [град] Sigma_A = 0.25
угла места [град] Sigma_B = 0
скорости [км/ч] Sigma_V = 0
Максимальный размер антенны: по горизонтали [метр] d_max = 7.5
по вертикали [метр] d_max = 4
Максимальное время обзора [ с] Tобз = 6
Опpеделение отношения сигнал/шум.
Для модели сигнала в виде последовательности радиоимпульсов
со случайной начальной фазой и нефлюктуирующей амплитудой;
отношение СИГНАЛ / ШУМ q = 43.561161
Выбоp pабочей длины волны.
С учетом энеpгетических огpаничений в pадиолинии,
тpебований по pазpешающей способности и точности
измеpения угловых кооpдинат пpи огpаничениях pазмеpов
антенны выбpали рабочую длину волны [см] = 23.000000
Расчет паpаметpов антенны и системы обзоpа ширина диаграммы направленности антенны на уровне 0.5 мощности:
в горизонтальной плоскости [гpад] = 5.384615
в вертикальной плоскости [гpад] = 35.000000
коэффициент направленного действия КНД = 159.1837
эффективная площадь антенны [кв. м] = 0.670107
линейные размеры антенны:
по горизонтали [ м] = 2.562857
по вертикали [ м] = 0.394286
время облучения точечной цели [ с] = 0.044872
Расчет частоты повтоpения зондиpующих импульсов и их числа в пачке.
частота повтоpения импульсов [Гц] = 1000.000000
число импульсов в пачке Nc = 44.871795
Расчет сpедней мощности излучения.
коэффициент pазличимости Кр = 4.853958
коэффициент поглощения энеpгии
pадиоволн в тpопосфеpе [дБ/км] = 0.000100
коэффициент шума пpиемника Кш = 2.000000
сpедняя мощность излучения [Вт] = 16.262457
Выбоp зондиpующего сигнала.
В качестве зондиpующих используем простые сигналы
последовательность зондирующих импульсов
некогерентных с большой скважностью
дальность измеряется однозначно
длительность радиоимпульсов [мкс] = 3.000000
импульсная мощность излучения [кВт] = 5.420819
Расчет потенциальной разрешающей способности.
потенциальная разрешающая способность:
по дальности [ м] = 450.000000
по азимуту [град] = 7.000000
Pасчет потенциальной точности измерения координат потенциальная среднeквадратическая погрешность измерения:
дальности [ м] = 38.466959
азимута [град] = 0.460288
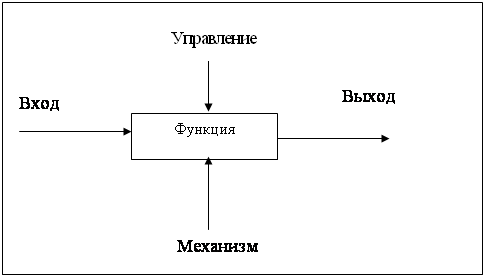
Описание упрощенной структурной схемы РЛС и принципов ее работыДля упрощения описания принципов построения и работы РЛС "АОРЛ - 85" целесообразно привести упрощенную обобщенную структурную функциональную схему, которая изображена в приложении.
Антенно-фидерное устройство РЛС формирует в пространстве диаграмму направленности по косекансоидальному закону. Это обеспечивает значительное сужение динамического диапазона входного сигнала при отражении волны от дальних и ближних целей. Антенна состоит из зеркала двойной кривизны и двух рупорных облучателей. Облучатели формируют основной и дополнительные лучи диаграммы направленности. При этом основной (нижний) луч используется для излучения СВЧ энергии и ее приема, как по первичному, так и по вторичному каналам. Дополнительный луч используется только на прием и только по первичному каналу.
Зона действия верхнего луча регулируется по дальности в пределах 0…50 км с дискретом в 10 км. Использование дополнительного (верхнего) луча увеличивает зону обзора РЛС в вертикальной плоскости и позволяет реализовать эффективные алгоритмы подавления отражений от местных предметов.
В состав антенного устройства входит преобразователь "вал-код", с которого снимается азимутальная информация в виде соответствующих меток. Эти метки поступают в блок синхронизации и сопряжения и используются при обработке отраженных сигналов. Передача электромагнитной энергии между вращающейся антенной и не подвижным узлами приемопередающей системы осуществляется с помощью блока вращающихся переходов.
Запускающие импульсы поступают из блока синхронизации и сопряжения первичного канала в блок приемного устройства соответствующего комплекта, где формируется радиочастотный сигнал длительностью 29 мкс с внутриимпульсной линейной частотной модуляцией (ЛЧМ). С блока приемного устройства ЛЧМ сигнал поступает на вход передатчика первичного канала на предварительный усилитель мощности передатчика. В качестве усилителя мощности модулирующего сигнала в РЛС "АОРЛ-85" использована лампа бегущей волны средней мощности. Выходной усилитель мощности СВЧ выполнен на амплитроне, сигнал с которого через соответствующее развязывающее устройство поступает в антенное.
Сигнал, отраженный от цели, воспринимается антенной РЛС. Каждый из приемников первичного канала имеет два входа: один для сигналов, поступающих от облучателя нижних углов, а второй - от облучателя верхних углов. Коммутация этих входов производится по высокой частоте с помощью коммутаторов, размещенных в приемных устройствах. Управление коммутатором - временное. Оно производится специальным импульсом переключения. Длительность импульса переключения может изменяться в зависимости от положения переключателя, размещенного на лицевой панели шкафа синхронизации и сопряжения. При этом сигналы от облучателя верхних углов могут подаваться до различных значений рабочей дальности 0, 10, 20, 30, 40 и 50 км. Эта дальность устанавливается в зависимости от рельефа местности: чем более он гористый, тем больше должна быть зона верхних углов. Верхние углы наряду с положительным качеством (уменьшение мощности отраженных сигналов от местных предметов) понижают видимость низколетящих целей. Поэтому наиболее приемлема рабочая дальность по верхним углам до 20 км.
Принятый сигнал проходит через циркуляр и коммутатор ВЧ, который служит для защиты входных целей приемника, и поступает на вход каскада УВЧ. Указанные узлы находятся в блоке передатчика первичного канала соответствующего комплекта. После усиления сигнал поступает в приемное устройство первичного канала, где он преобразуется в промежуточную частоту, усиливается и в оптимальном фильтре сжимается до величины, не более 3 мкс по уровню 0,5. При сжатии амплитуда полезного сигнала увеличивается относительно среднего уровня шумов примерно в 8 раз по мощности.
Далее полезный сигнал на промежуточной частоте поступает на вход системы СДЦ, где проходит обработку в дискретно-аналоговом фильтре. В результате обработки выделяются сигналы от движущихся целей и подавляются сигналы от местных предметов и низкоскоростных метеообразований. С выхода приемного устройства первичного канала обработанный сигнал через блок сопряжения поступает на вход АПОИ "ВУОКСА".
Одновременно видеосигнал с блока сопряжения поступает в соответствующий блок синхронизации и сопряжения, откуда через блок сигналов аппаратуры КДП подается на индикатор кругового обзора.
Вторичный канал РЛС работает по принципу излучения запросных и приема ответных сигналов на частотах международного и отечественного диапазонов.
Форматы запросных и ответных сигналов соответствуют как отечественным стандартам, так и нормам ИКАО.
В состав вторичного канала входят модули передатчика, приемника и дешифратора.
Облучатель вторичного канала конструктивно совмещен с облучателем первичного канала. Для борьбы с сигналами боковых лепестков во вторичном канале используются антенны подавления, которые с соответствующей аппаратурой обеспечивают подавление по запросу и ответу для каждого из диапазонов. Два раздельных приемника в каждом диапазоне одновременно обрабатывают сигналы двух каналов - основного и канала подавления. В результате совместной обработки на выходе вторичного канала присутствует только сигнал от основного луча ДН антенны.
В РЛС при ответе для подавления сигналов боковых лепестков ДН используется метод фазовой окраски. При этом методе амплитудные различия между сигналами основного и бокового лепестков ДН преобразуются по высокой частоте в фазовые. После усиления сигналов в трактах приемников их фазовые различия снова преобразуются в амплитудные, после чего поступают в схемы обработки. Этот метод позволяет получить более высокий коэффициент подавления боковых лепестков ДН, поскольку фазовые характеристики приемников имеют большую стабильность, чем амплитудные.
Сигналы, полученные с выходов приемников вторичных каналов в УВД и RBS, поступают на коммутатор и далее на дешифратор АПОИ. Сигналы канала УВД подаются также на контрольный индикатор, в состав которого входит соответствующий дешифратор. При этом декодируется только координатная информация.
На колонке привода антенной системы РЛС расположены преобразователь "вал-код", метки азимутальной информации (МАИ) в виде кода и сигнал "Север". Угловая информация используется для обработки полезных сигналов, юстировки антенны РЛС в северном направлении, а также формирования синусно-косинусных напряжений для развертки контрольного индикатора кругового обзора (КИКО).
Заключение
При выполнении курсовой работы были изучены основные принципы построения и эксплуатации аэродромных радиолокационных средств на примере "АОРЛ-85".
Были рассмотрены назначения, состав, размещение и эксплуатационно-технические характеристики данной РЛС, а также требования ИКАО к аэродромным радиолокационным средствам.
В ходе ознакомления с эксплуатационно-техническими характеристиками данной РЛС и с требованиями ИКАО, выявились некоторые несоответствия:
разрешающая способность "АОРЛ - 85" по дальности (первичный канал) составляет 800 м и по азимуту 7º, а по ИКАО по дальности 230 м или 1% от Rmaxи по азимуту 4º.
частота обновления информации (время обзора)"АОРЛ - 85" 6 с, требование ИКАО 4 с.
Рекомендовано, в связи с увеличением интенсивности, и еще более ужесточить требования ИКАО и соответственно, либо модернизировать старое оборудование, либо разрабатывать новые модели.
Список использованных источников
1. Перевезенцев Л.Т., Зеленков А.В., Огарков В.Н. Радиолокационные системы аэропортов. Учеб. для вузов гражданской авиации. Под ред.Л.Т. Перевезенцев. - М.: Транспорт, 1981.
2. Тучков Н.Т. Автоматизированные системы и радиоэлектронные средства управления воздушным движением: Учеб. для вузов - М.: Транспорт, 1994
3. Лушников А.С. Наземные радиоэлектронные средства обеспечения полетов воздушных судов: Учебное пособие. - Ульяновск: УВАУ ГА, 2001
4. Радиотехнические системы связи, воздушной навигации и управления воздушным движением: Методические указания по курсовому проектированию для курсантов и студентов ОЗО специальности 240300, специализации 240305/сост.: А.С. Лушников, С.Н. Тарасов. - Ульяновск: УВАУГА, 2000.
Похожие работы
... противника, и комплекс мощных помех КМП-1, служащий для радиоэлектронного подавления РЛС APY-1 самолета дальнего радиолокационного обнаружения и управления типа «АВАКС». 3. Расчеты по оценке эффективности радиоэлектронного подавления РЛС ОНЦ активными шумовыми помехами 3.1 Расчеты при создании активных помех из боевых порядков прикрываемых самолетов Для расчета линейных размеров зон ...
... электромагнитной совместимости. ГОСТ 29205-91(2004) - нормы и методы испытаний индустриальных радиопомех от электротранспорта. ГОСТ 30372-95 - термины и определения понятий в области электромагнитной совместимости технических средств. ГОСТ 50012-92(2004) - методы измерения параметров низкочастотного периодического магнитного поля технических средств (ТС) в диапазоне частот 5—10000 Гц. ГОСТ ...
... измерений на ПЭДМ под руководством В.Д.Плахотникова, К.Ф.Саенко, Л.Н.Гриненко, А.Ф.Мандрыко и В.Д.Регинского. Принятые в ходе Великой Отечественной войны меры по развитию отечественной радиоэлектронной промышленности и разработке корабельных радиолокаторов (создание в 1943г. Совета по радиолокации при Государственном комитете обороны, Отдела спецприборов ВМФ во главе с С.Н.Архиповым, в 1945г. - ...

... назначение, содержание и описание функциональных характеристик, субхарактеристик и атрибутов, определяющих специфические особенности целей, задач, свойств и сферы применения конкретного программного средства – его функциональную пригодность; · конструктивные характеристики качества, способствующие улучшению и совершенствованию назначения, функций и возможностей применения ПС; ...
0 комментариев