КУРСОВАЯ РАБОТА
по дисциплине
"Элементы систем автоматики"
“Разработка устройства логического управления "
Содержание
1. Введение
2. Структурный синтез управляющего автомата
2.1 Построение направленного графа абстрактного автомата
2.2 Минимизация абстрактного автомата
2.3 Кодирование внутренних состояний и выбор типа памяти
2.4 Определение логических функций возбуждения памяти
2.5 Составление таблицы переходов
2.6 Выбор элементов и микросхем
2.7 Составление модели в OrCAD на основе полученных упрощенных выражений
2.8 Результаты моделирования схемы автомата
3. Выбор аналоговых элементов
3.1 Электродвигатель ДПР-72-Н1-03
3.2 Транзисторы VT1,VT2 -КП812А
3.3 Датчик давления
4. Выбор схем, реализующих заданные передаточные функции, вспомогательные функции и реализация коммутаций устройств со схемой автомата Мура
4.1 Таймер
4.2 Тактовый генератор
4.3 Устройство начального пуска
4.4 Устройство реализации функции F1
4.5 Устройство, реализующее функцию F2
4.6 Подключение контактного сигнала
4.7 Устройства опорного напряжения
4.8 Устройство индикации
4.9 Устройства сопряжения
5. Список литературы
1. Введение
Современное промышленное производство является сложным комплексным процессом, который требует быстрого и многомерного контроля за всеми параметрами. Такой контроль был бы невозможен без применения современной электронной техники и автоматики вследствие того, что существуют многочисленные физические явления недоступные для простого визуального контроля. В настоящее время промышленная автоматика развивается значительными темпами, что связано с постоянно повышающимся уровнем сложности и качества технологических процессов. Электронные промышленные устройства являются сложными системами, в состав которых входят энергетические преобразователи, элементы электропривода, микропроцессорные узлы обработки информации и связи с внешними управляющими объектами, а также датчики различного назначения, устройства согласования с объектом управления. Очевидно, что задача разработки промышленного автомата включает в себя комплекс проблем, которые сами по себе представляют отдельную область современной электроники. Важно обеспечить высокую надежность и защиту от сбоев, поскольку существуют технологические процессы, нарушение которых может привести к катастрофическим последствиям опасным для жизни людей и окружающей среды. Поэтому создание таких устройств требует от разработчика хороших знаний в области электроники и в области технологических процессов, для управления которыми создается промышленный автомат.
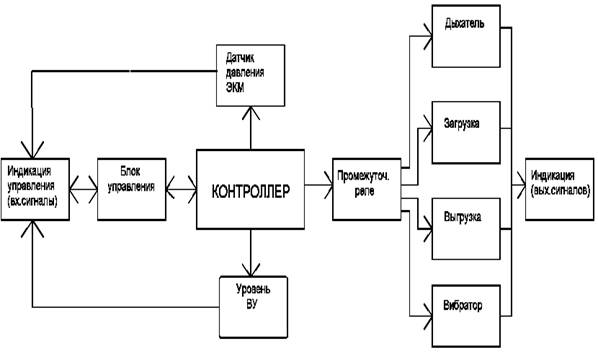
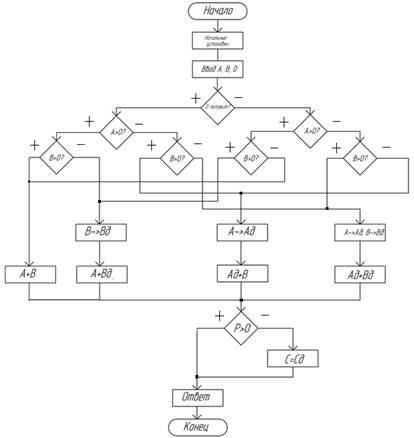
Целью данного курсового проекта является разработка электронного автомата при заданных входных сигналах и контролируемых параметрах, а также исполнительных устройствах. Курсовой проект предусматривает решение основных задач реального инженерного проектирования электронной техники: структурный синтез, разработку принципиальной схемы, моделирование основных функциональных узлов, конструирование. Функционирование автомата производится по приведенному в задании алгоритму.
2. Структурный синтез управляющего автомата
2.1 Построение направленного графа абстрактного автомата
При проектировании устройства логического управления будем ориентироваться на синхронный дискретный автомат Мура, поскольку для асинхронного дискретного автомата опасен эффект состязания ("гонок"). Для исключения эффекта "гонок" нужно применять соседнее кодирование логических переменных всех состояний автомата, чтобы переход в следующее состояние отличался от предыдущего только одним разрядом. В данном случае это проблематично, т.к каждое состояние автомата по заданию содержит три разряда и существует возможность перехода из заданного состояния в одно из двух состояний в зависимости от выполнения или невыполнения определенного условия. Кроме того, для автомата Мура таблица выходов вырождается в одну строку, в отличие от автомата Мили. При построении автомата Мура операторные вершины граф-схемы ставятся в соответствие состояниям автомата. Переход в новое состояние осуществляется в зависимости от содержания условной вершины, следующей за операторной.
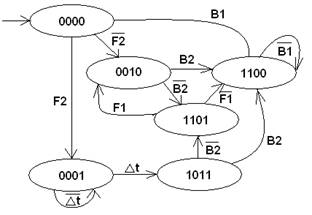
Построение направленного графа автомата Мура:
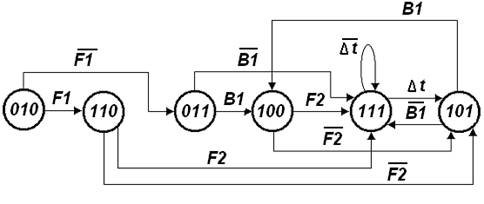
Рис.2.1 Направленный граф автомата Мура.
Направленный граф автомата построен, исходя из заданного алгоритма, и имеет шесть состояний, соответствующих операторным вершинам исходного алгоритма.
Здесь использованы следующие логические условия и сигналы: B1= S1 S2 S3;
При построении графа использованы следующие логические условия и сигналы:
![]()
![]()
Сигналы:
S - сигнал контактного датчика (S=0 - контакт разомкнут, S=1 - контакт замкнут); ![]() временная задержка,
временная задержка, ![]() .
.
2.2 Минимизация абстрактного автомата
В данном случае минимизация не требуется, так как исходный алгоритм не содержит повторяющихся состояний.
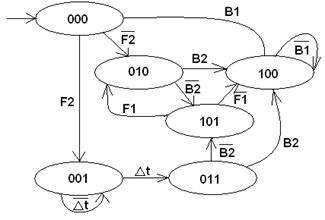
2.3 Кодирование внутренних состояний и выбор типа памяти
Поскольку автомат имеет шесть внутренних состояний, потребуется использовать трехразрядный код и соответственно три ячейки памяти. Это следует из формулы:
n= [целая часть (log2N)] +1,где N - число внутренних состояний автомата; n - количество ячеек памяти.
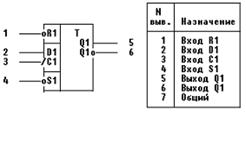
В качестве элементов памяти применяются динамические D - триггеры, таким образом, автомат будет синхронным. Отказ от разработки асинхронного автомата связан со сложностью кодирования состояний асинхронного автомата с учетом эффекта "гонок". В связи с этим надежность асинхронного автомата при воздействии внешних возмущений, которые присутствуют в промышленных условиях, будет невысокой. Например, наличие импульсных помех в сигнальных цепях внешних датчиков и каналов связи может привести к ложным переключениям логических элементов, если не использовать дополнительных мер по защите от помех. При этом синхронный автомат более устойчив к импульсным помехам, так как входной сигнал D - триггера должен быть зафиксирован заранее, до прихода тактового перепада, на время не меньшее чем защитный интервал.
2.4 Определение логических функций возбуждения памяти
Определим функции возбуждения памяти. При составлении функций возбуждения памяти учитываются только те переходы, включая петли, при которых в соответствующем разряде логический "0" меняется на "1" или "1" сохраняется.
__ __ __ ___ __ ___ __ __ __
D2=g2g1g0∆t+g2g1g0∆t+g2g1g0B1+g2g1g0B1+g2g1g0B1+g2g1g0B1+g2g1g0F1
__ __ ___ __ ___ __ __ __
+g2g1g0F2 +g2g1g0F2 +g2g1g0F2 +g2g1g0F2;
___ __ __ ___ __ __ __ __ __ __ ___ __ ___
D1=g2g1g0∆t +g2g1g0F1+g2g1g0F1+g2g1g0F2+ g2g1g0F2 +g2g1g0B1+g2g1g0B1
___ __ ___ __ ___ __ __ ___ __ __ ___ __ ___
D0=g2g1g0∆t+g2g1g0∆t+g2g1g0B1+g2g1g0B1+g2g1g0F1+g2g1g0F1+g2g1g0F2+
__ __ __ ___
g2g1g0F2+g2g1g0F2
Упростив выражения, применяя алгебру логики, получим:

![]()

Теоретически возможны дальнейшие преобразования приведенных выражений и их минимизация в ещё большей степени, но в данном случае минимизация производилась с учетом использования мультиплексоров при реализации автомата с целью снизить количество корпусов микросхем.
Таким образом, число элементарных логических элементов в схеме автомата будет сведено к минимуму.
2.5 Составление таблицы переходовСоставим таблицу переходов (таблица 1):
Таблица 1
| № п/п | При переменных | Переходы |
| 1 | F1F2 | 010->110->111 |
| 2 | F1 | 010->110->101->100->101 |
| 3 | F1F2 | 010->110->111->101->111 |
| 4 | F1 | 010->110->101->100->101 |
| 5 |
| 010->011->111->101->111 |
| 6 |
| 010->011->100->111 |
| 7 |
| 010->011->100->101->100 |
| 8 |
| 010->011->100->111>101->100 |
| 9 | F1F2 | 010->110->111->101->100->111 |
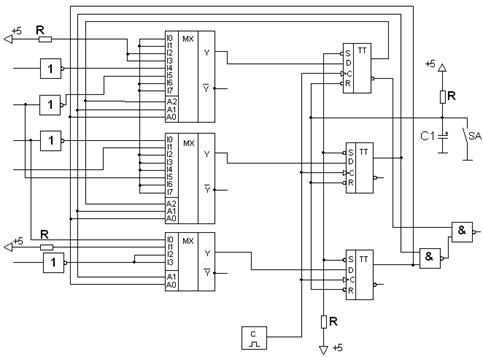
С учётом промышленного назначения проектируемого автомата целесообразно использовать ТТЛ-логику (для простоты коммутации - так как часть входных сигналов задается уровнем ТТЛ (b1) при напряжении питания 12 В. Для реализации автомата потребуются микросхемы: 3 8-входовых мультиплексора (74151А), 3 D-триггера с дополнительными входами установки и сброса (7474), 4 элемента НЕ (7404). Также в состав автомата входят некоторые другие микросхемы, которые будут рассмотрены при разработке соответствующих функциональных блоков.
Схема дискретного автомата выглядит следующим образом:
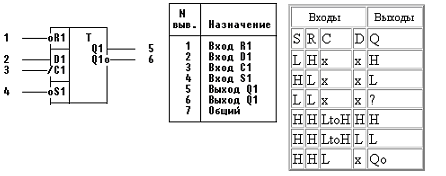
Рис.2.2 Схема управляющего автомата
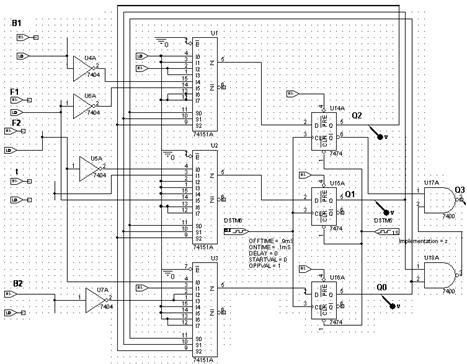
2.7 Составление модели в OrCAD на основе полученных упрощенных выражений
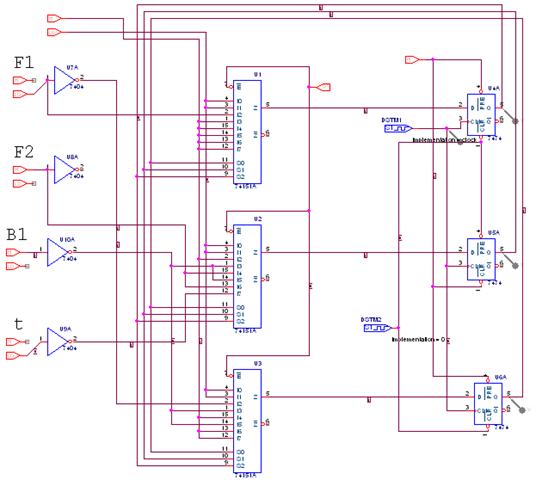
Рис.2.3 Схема управляющего автомата при моделировании
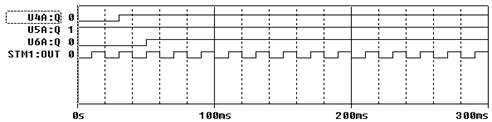
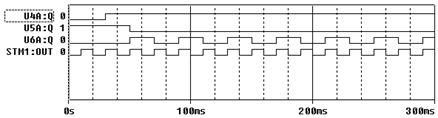
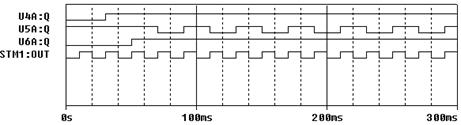
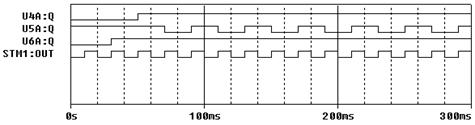
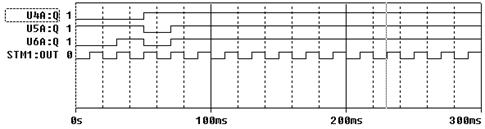
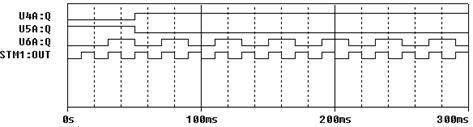
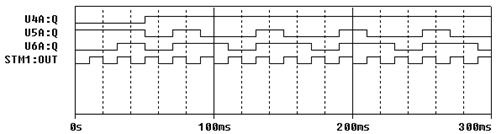
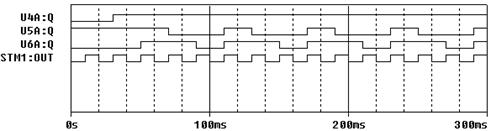
2.8 Результаты моделирования схемы автоматаПодставляя на соответствующие входы значения ![]() проверяем правильность составления модели:
проверяем правильность составления модели:
1) F1F2 ![]()
2) F1![]() B1
B1
3) F1F2![]()
![]()
4) F1![]() B1
B1![]()

5) ![]()
![]()
![]()
![]()
6) ![]() B1 F2
B1 F2![]()
7) ![]() B1
B1 ![]()
8) ![]() B1 F2
B1 F2 ![]()
9) F1F2![]() B1
B1
3. Выбор аналоговых элементов
3.1 Электродвигатель ДПР-72-Н1-03
Основные характеристики электродвигателя отражены в таблице 2:
Таблица 2
| Наименование | Электродвигатель постоянного тока коллекторный |
| Марка | ДПР-72-Н1-03 |
| Род тока | Трёхфазный - 50; 60 Гц |
| Напряжение, В | 27 |
| Мощность, кВт | 18,5 |
| Момент, мН*м | 39, 20 |
| Частота вращения, об/мин | 4500 |
| Потребляемый ток в номинальном режиме | 1,25А |
| Начальный пусковой момент, мН*м | 245 |
| Электромеханическая постоянная времени, мс | 20 |
| Масса, кг | 0,6 |
| Диаметр корпуса, мм | 40 |
| Диаметр вала двигателя, мм | 4 |
| Длина корпуса, мм | 84,2 |
| Длина вылета вала, мм | 14,5 |
Общие сведения о данных транзисторах занесены в таблицу (таблица 3):
Таблица 3
| Тип транзистора | КП812А: КП - транзистор полевой; 812 - номер серии; |
| Структура | N-FET |
| Макс. напр. сток-исток, В | 60 |
| Макс. ток сток-исток, А | 50 |
| Макс. напр. затвор-исток, В | 2 |
| Сопр. канала в откр. сост., мОм | 0.028 |
| Макс. рассеиваемая мощность, Вт | 125 |
| Крутизна хар-ки, мА/В | 15000 |
| Тип корпуса | ТО-220 АВ |
Датчик давления выбираем из условия, что измерения будут производиться в диапазоне 0,1…1МПа. Датчик давления состоит из кремниевого мембранного чувствительного элемента, на котором сформирована п/п мостовая резистивная структура так, что одно из плеч моста находится в зоне наибольшей деформации мембраны. Сигнал разбаланса моста, который пропорционален приложенному давлению, поступает или на внешние выводы или на схему обработки и нормализации. Корпус выполнен из коррозионно стойкого металла с двойной нержавеющей мембраной для агрессивных сред. Датчик на агрессивные среды имеет самоуплотняющуюся резьбу для подключения к магистрали. Датчик не содержит подвижных частей. Область применения:
• Насосные станции и трубопроводы, системы водоснабжения
• Автомобильная техника
• Медицинская техника
• Холодильная техника
• Аналитические приборы и метеорологическая техника
• Различные производственные процессы
Основные характеристики датчика, удовлетворяющего заданию курсовой работы, приведены в таблице (таблица 4):
Таблица 4
| Наименование | 19C050РG3K |
| Диапазон измерений | 0,1…1МПа |
| Макс. допустимое давление, кПа | 10,2 атм. |
| Напряжение питания, | 15 |
| Выходное напр. Usp, мВ | 0…100 |
| Чувствительность, мВ/кПа | 0,035 |
| Компенсация, калибровка | есть |
| Линейность,% от Usp | ±0,25 |
| Измеряемая среда* | 1 |
| Диапазон рабочих температур, °С | -40…+125 |
*) -
агрессивные жидкости и газы
Внешний вид корпуса выбранного датчика приведен на рис.3.1:

Рис.3.1 Внешний вид корпуса датчика давления 19C050РG3K
4. Выбор схем, реализующих заданные передаточные функции, вспомогательные функции и реализация коммутаций устройств со схемой автомата Мура
4.1 Таймер
В качестве таймера будем использовать микросхему КР1006ВИ1 с напряжением питания +12 В. Время импульса определяется по формуле:
![]()
Нам необходимо получить время, равное 13 с. Значит, задавая значение сопротивления 118,3 кОм, получаем ёмкость конденсатора 100 мкФ.
Выбираем резистор металлоэлектрический типа С2-23 0.125/0.25 1% 118кОм, конденсатор электролитический К50-35 100мкФ 63В 097RLP.
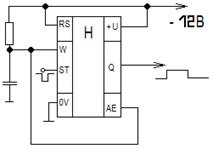
Рис.4.1 Схема включения таймера
4.2 Тактовый генераторВ качестве тактового генератора будем использовать микросхему КР531ГГ1. Данная микросхема удобна тем, что на выходе мы получаем стандартный сигнал ТТЛ логики и простотой управления частотой.
Микросхема представляет собой два независимых генератора, частота которых определяется напряжением.
Каждый генератор имеет два входа для управления частотой: U - управление частотой, DU - управление диапазоном частоты. Если на вход U подан высокий уровень, а на DU низкий, то для фиксации частоты следует подсоединить между входами Свн внешний элемент - конденсатор или кварцевый резонатор.
На выходах мультивибраторов получается меандр с частотой
f0=0.0005/CТ
Приведенное выше выражение справедливо только для ТТЛ серии.
По входу ЕI входную последовательность можно запретить, если подать напряжение высокого уровня.
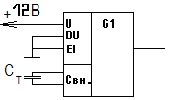
Рис.4.2 Схема подключения генератора
Ёмкость, необходимая для нашей частоты (25Гц) находится из уравнения: 25=0.0005/CТ. Отсюда СТ=0.0005/25=2 мкФ.
Выбираем электрический алюминиевый миниатюрный конденсатор емкостью К50-35 мини 2.2 мкф 50 В (4х7мм)
4.3 Устройство начального пуска
Устройство представляет собой RC - цепь, формирующую при включении низкий потенциал на входе сброса D - триггеров, для принудительного установления начального состояния.
Схема устройства приведена ниже:
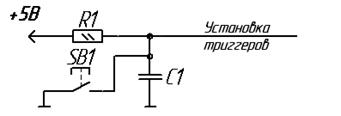
Рис.4.3 Устройство начального сброса.
Величины элементов выбираем следующие: R1=1 кОм, С1=25 нФ. Резистор типа С2-29В-0.125-1кОм±1%, конденсатор - К50-35-25В-24нФ
4.4 Устройство реализации функции F1
Задание: F1=ФНЧ 1го порядка, fгр=25 Гц, Ку=1, х1=-3Дб.
Передаточной функцией ФНЧ 1го порядка является передаточная функция апериодического звена 1го порядка. Рассчитаем ФНЧ с помощью передаточной функции звена 1го порядка.
![]()
![]() ,
, ![]() ,
, 
![]()
Резистор и конденсатор выбираем из стандартного ряда Е48 или Е96 для обеспечения допустимого класса точности.
Для выполнения условия ![]() ставим на выходе ФНЧ компаратор, который сравнивает выходное напряжение ФНЧ и опорное напряжение.
ставим на выходе ФНЧ компаратор, который сравнивает выходное напряжение ФНЧ и опорное напряжение.
Опорное напряжение рассчитаем от уровня 10В.
3дБ = 10-3/20=0,71Uвх
Т.о. Uоп = ![]()
Для получения Uоп используем источник тока REF200 с выходом 100мкА и резисторы R1 С2-23 0,125/0,25 1% 51кОм и R2 С2-23 0,125/0,25 1% 20кОм.
Схема реализации Uоп представлена на рис 4.5
Схема реализации функции ![]() представлена на рис 4.4
представлена на рис 4.4
Используемые элементы R С2-23 0,125/0,25 1% 3,2кОм, С К50-35-25В-2мкФ компаратор LM111FE.
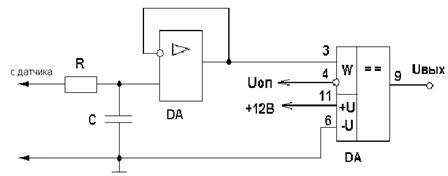
Рис.4.4 Схема реализации функции ![]()
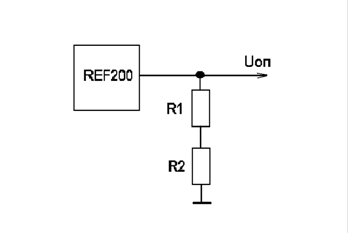
Рис.4.5 Схема реализации Uоп
4.5 Устройство, реализующее функцию F2Для реализации устройства функции F2 нам потребуется две схемы: антилогарифматор и вычитатель.
Схема антилогарифматора и значения сопротивлений и емкостей выбираем по [2, стр.150]
Схема реализует функцию:
Uвых=Uоп (R9/R5) e (R7/ (R7+R8)) (Uвх/Uт)
UопR9/R5=2
R7/ ( (R7+R8) UT) =0.2
Пусть опорное напряжение 0,1В и зададим R5=1000Ом, получим R9=200Ом. Выбираем резисторы С2-23 0,125/0,25 1% 1кОм; С2-23 0,125/0,25 1% 200Ом.
UT=26мВ, зададим R7=1кОм, тогда R8=191кОм. Выбираем С2-23 0,125/0,25 1% 1кОм; С2-23 0,125/0,25 1% 191кОм.
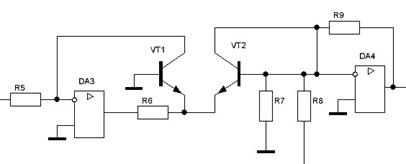
Рис.3.6. Схема антилогарифматора.
Выбираем схему вычитателя [2, стр.138].
Uвых=A (U1 - U2), в данном случае A=1.
Выбираем резисторы так, чтобы R16=R17=R18=R19=10кОм. Выбираем резисторы из ряда E96 С2-23 0,125/0,25 1% 10кОм.
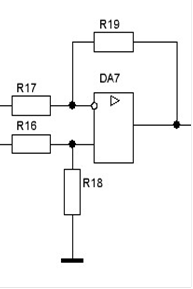
Рис.3.7. Схема вычитателя.
4.6 Подключение контактного сигналаДля реализации логического сигнала B1 мы должны преобразовать контактные сигналы в логический. На данной схеме это реализовано на основе оптопары. Логические элементы: DD34 ИСКЛ. ИЛИ (74F86PC).
В качестве оптопары будем использовать оптопару TLP521-1 со следующими параметрами:
| Коэффициент передачи по току, при токе 10мА,% | 600 |
| Напряжение коллектор-эммитер, В | 55 |
| Напряжение изоляции, кВ | 2,5 |
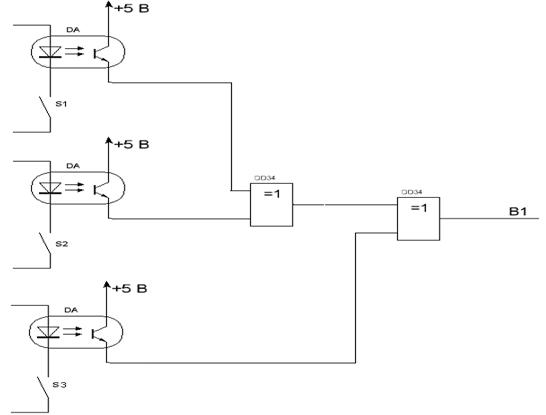
Рис.4.8 Схема реализации сигнала B1
4.7 Устройства опорного напряжения
Для реализации опорного напряжения будем использовать источники тока REF200 и сопротивления для получения соответствующего напряжения.
Опорное напряжение для нормирующего устройства датчика составляет 0,1В. R=U/I=0.1/100*10-6=1000 Ом, по ряду E96 выбираем резистор С2-29-0,125-1 кОм±0,05%.
Опорное напряжение для функции F2=5|Uн | U=7B.
Отсюда R=U/I=7/100*10-6=70kОм. Из ряда E96 выбираем резистор С2-23 0,125/0,25 1% 70кОм.
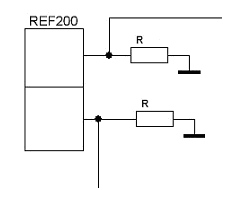
Рис.4.9 Схема подключений для получения опорного напряжения.
4.8 Устройство индикации
Для реализации устройства индикации нам потребуются АЦП и устройство, выводящее значение сигнала.
Устройство АЦП должно выводить сигнал с точностью до 1 десятой паскаля, при этом максимальное значение сигнала, согласно заданию, получается при изменении Uном от 0В до 10В соответствующее графику:
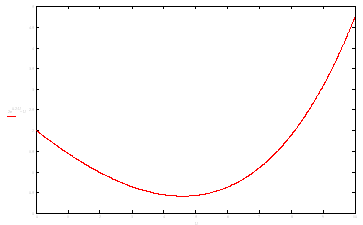
Рис.4.10 График зависимости F2 (UH).
т.е. от 0,42В до 4,755В. Для выберем АЦП 6-разрядный со входным сигналом, содержащим диапазон от 0,4В до 4,8В и выходные сигналы не более 5В. Выбираем AD7680 со следующими параметрами:
| Шифр изделия | AD7680 |
| Амплитуда вх. сигнала | от 0 до VDD |
| Пропускная способность | 100000 циклов/с |
| Входной сигнал | униполярный |
| Интегральная нелинейность (макс), МЗР | 4 |
| Рассеиваемая мощность, мВт | 3 при 3 В 15 при 5 В |
| Корпус | SOT-23 |
| Корпус напряжение, внеш/внутр | внеш. |
| Интерфейс | последовательный |
| Описание | миниатюрный, 16-разрядный, 100 тыс. цикл/с, униполярный |
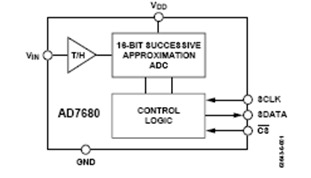
Рис.3.11 Схема подключения AD7680
Для вывода сигнала на индикатор потребуется двоично-десятичный дешифратор разрядов. Устройство индикации:
| Наименование | Kол-во разр., M | Прямой ток, мА | Макс. прям. напряж., В | Макс. обрат. напряж., В | Макс. прям. ток, мА | Макс. прям. импул. ток, мА | tи. мс | Тип корпуса |
| KИПЦ09А-2/7K | 2 | 20 | 2 | 5 | 20 | 150 | 10 | KИ5-17 |
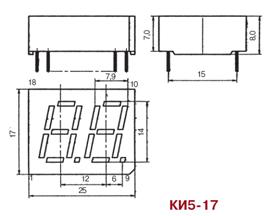
Рис.3.12. Тип корпуса устройства индикации
4.9 Устройства сопряжения
Устройства сопряжения нужны трех типов:
Нормализация шкалы датчика;
Устройства сравнения (компараторы);
Устройства сопряжения КЛУ1 с транзисторами и электродвигателем.
Нормализация шкалы датчика
Для нормализации шкалы датчика надо расширить шкалу до 10В.
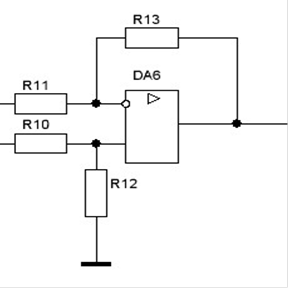
Рис.3. Схема нормализации сигнала датчика
Устройства сравнения.
Для сравнения сигнала с устройства F2 с заданным необходимо получить значение заданного сигнала на основе схемы REF200 R=U/I=7/0.00001=70кОм.
Выбираем резисторы из ряда E96 С2-23 0,125/0,25 1% 70кОм. В качестве компаратора будем использовать LM111FE с параметрами:
| Совместимость с технологиями | RTL, DTL, TTL, MOS |
| Uи. п. | 1,5…15В |
| Uсм | 0.7…3мВ |
| Iвх | 60…100нА |
| ΔIвх | 4…10нА |
| Iвых | 50мА |
| tуст | 0,04мкс |
| Iпот | 5…6мА |
| RT | 6,4мВт/С |
| Тип корпуса | DIP-8 |
Рис.3. Схема включения компаратора.
Устройства коммутации с внешними элементами.
Необходимо разработать три устройства для коммутации логических сигналов с транзисторами и электродвигателем.
Для сопряжения автомата с транзисторами используется твёрдотельное реле К293ЛП6Р со следующими параметрами:
| Характеристика | ТТЛ-выход (2 канала) |
| Напряжение изоляции, В | 3000 |
| Вход. ток во включ. состоянии, мА | 5-20 |
| Скорость передачи данных, Мб/с | 2 |
| Ток потребления, мА | 10 |
| Выходное напряжение, В | 5-15 |
| Тип корп. | DIP-8 |
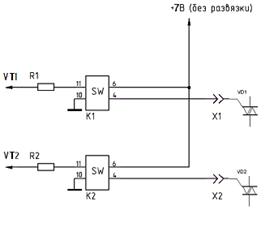
Рис.3. Схема включения устройства сопряжения.
Резистор R1,R2 предназначены для ограничения тока на уровне 10 мА:
![]() . Выбираем резистор 499Ом.
. Выбираем резистор 499Ом.
Разработаем устройство управления электродвигателем
По условию курсового задания мощность управления составляет 10ВА. Будем считать напряжение питания электромагнита равным Ud=127/![]() =89.8В, тогда можно вычислить ток управления.
=89.8В, тогда можно вычислить ток управления.
![]() .
.
В схеме управления будем использовать оптоэлектронное реле, которое помимо усиления сигнала управления обеспечит гальваническую развязку электромагнитов и автомата.
| Наименование | 4N29 |
| Функцион. схема (номер схемы) | 8 |
| Kоэффициент передачи по току, при токе=10 мА,% | 100 |
| Напряжение коллектор-эмиттер, В | 30 |
| Макс. выходной темновой ток коллектора, мА | 150 |
| Напряжение изоляции, кВ | 2,5 |
| Тип корпуса | PDIP-6 |
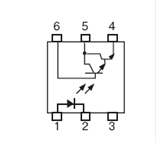
Рис.3. Схема устройства 4N29.
Как видно из таблицы данное реле удовлетворяет нашим требованиям.
Составим схему согласующего устройства на основе оптореле 4N98.
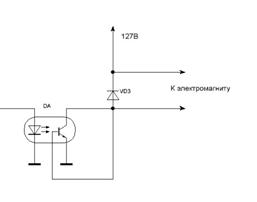
Рис.3 Схема согласования выхода автомата с электромагнитом.
Зададимся входным током реле равным 10мА, тогда учитывая падение на транзисторе и светодиоде, рассчитаем токоограничивающий резистор ![]() .
.
![]() кОм.
кОм.
Используемые элементы:
VT1 - транзистор КТ315Г
Мощность 150мВт;
Ток коллектора 100мА;
h21э 50. .350.
R1,R2 резисторы МЛТ-0,125.
VD1 - Импульсный диод FR203
Ток 2А;
Обратное напряжение 200В.
VT2 - Оптическое МОП-реле 5П98.
Моделирование аналогового устройства F2
Схема устройства F2 в OrCAD.
Результаты моделирования.
| Резисторы | |||
| R1,R15,R17 | С2-29В-0.125-1 Ком + 1% | 3 | |
| R2 | С2-29В-0.125-2 МОм + 1% | 1 | |
| R3,R6 | С2-29В-0.125-2 КОм + 1% | 2 | |
| R4,R7,R21 | С2-29В-0.125-47 КОм + 1% | 3 | |
| R5 | С2-29В-0.125-750 КОм + 1% | 1 | |
| R8 - R10 | МЛТ-0.125-5.1 Ком + 5% | 3 | |
| R11 | С2-29В-0.125-51 Ом + 1% | 1 | |
| R12 | С2-29В-0.125-953 Ом + 1% | 1 | |
| R13 | С2-29В-0.125-1,5 КОм + 1% | 1 | |
| R14 | С2-29В-0.125-7,15 КОм + 1% | 1 | |
| R16 | С2-29В-0.125-15 КОм + 1% | 1 | |
| R18 | С2-29В-0.125-100 Ом + 1% | 1 | |
| R19 | С2-29В-0.125-261 Ом + 1% | 1 | |
| R20 | С2-29В-0.125-100 КОм + 1% | 1 | |
| R22 | С2-29В-0.125-820 Ом + 1% | 1 | |
| R23 | С2-29В-0.125-1 МОм + 1% | 1 | |
| R24 | С2-29В-0.125-102 Ом + 1% | 1 | |
| Позиционное обозначение | Наименование | Кол. | Примечание |
| Диоды и транзисторы | |||
| VD1-VD3 | КД521А | 3 | |
| VD4-VD6 | FR203 | 3 | |
| VT1 | RPM20PB | 1 | Фототранзистор |
| Конденсаторы | |||
| С1 | К50-35-25В-24нФ | 1 | |
| С2 | КМ-6-0,047мкФ | 1 | |
| С3 | К56-2,2мкФ*16В | 1 | |
| С4, С7, С9 - С11, C16, C18, C19 | КМ-6-0,1мкФ | 8 | |
| C5, C8 | КМ-6-0,01мкФ | 2 | |
| C6 | К56-2200мкФ*16В | 1 | |
| C12 | К50-35-25В-1мкФ | 1 | |
| C13 | КМ-6-1мкФ | 1 | |
| C14 | К56-470мкФ*25В | 1 | |
| C15, C17 | К56-22мкФ*16В | 2 | |
| C20 | КМ-6-100пФ | 1 | |
| C21 | КМ-6-0,22мкФ | 1 | |
| C22 | КМ-6-0,47мкФ | 1 | |
| C23 | КМ-6-0,02мкФ | 1 | |
| Реле | |||
| К1-К3 | ESR211-060-03-01 | 3 | |
| Индикаторы | |||
| HG1 | ITS - E0803 | 1 | ЖКИ дисплей на 3.5 разряда |
| Коммутационне изделия | |||
| SA1 | SPA-108 | 1 | Кнопка "СБРОС" |
5. Список литературы
1. Васильев В.И., Миронов В.Н., Гусев Ю.М. Электронные промышленные устройства. - М.: Высшая школа. 1988. - 303 с.
2. Пухальский Г.И., Новосельцева Т.Я. Проектирование дискретных устройств на интегральных микросхемах: Справочник. - М.: Радио и связь. 1990. - 304 с.
3. Вуколов Н.И., Михайлов А.Н., Знакосинтезирующие индикаторы: Справочник. - М.: Радио и связь. 1987. - 576 с.
4. Дубровский В.В., Иванов Д.М. Резисторы: Справочник. - М.: Радио и связь 1991. - 528 с.
5. Бахтиаров Г.Д., Малинин В.В., Школин В.П. Аналого - цифровые преобразователи. - М.: Советское радио. 1980. - 280 с.
Похожие работы
... параметрах, а также исполнительных устройствах. Функционирование автомата производится по приведенному в задании алгоритму. 1. Структурный синтез управляющего автомата 1.1 Построение направленного графа абстрактного автомата При проектировании устройства логического управления будем ориентироваться на синхронный дискретный автомат Мура, поскольку для асинхронного дискретного автомата ...
... шара, снабженного канавками на поверхности для создания оптимальной турбулентной струи пылевозд. смеси. 1.3 Разработка структурной схемы В данном разделе необходимо представить структурную схему (рис.1.3.1) разрабатываемого нами автоматизированного блока управления пневмокамерным насосом. Структурной называется схема, которая определяет функциональные основные части изделия и связи между ...
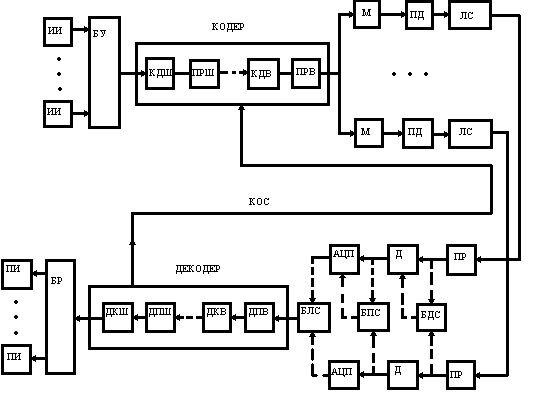

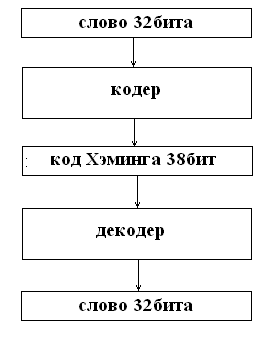
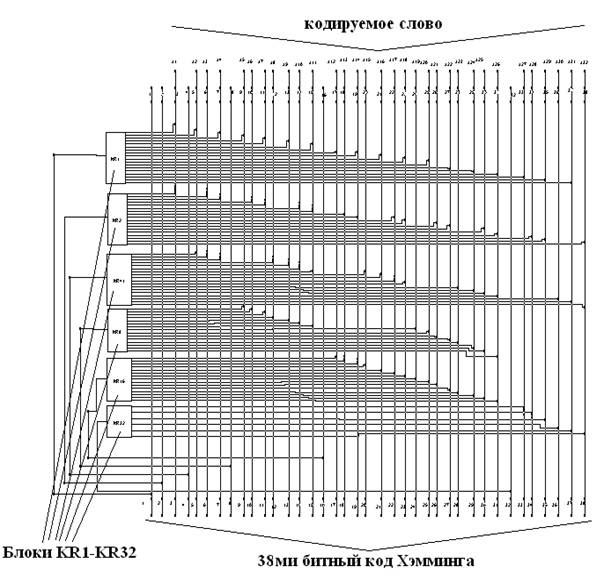
... кодирования можно разработать устройство, которое поможет понять принцип работы метода Хэмминга. Кодер – декодер будем разрабатывать на основе ИМС К555ВЖ1. 2.1 Разработка устройства кодирования информации методом Хемминга Кодер, преобразует 32х битное слово в 38ми разрядный код Хэмминга, после чего слово хранится в памяти или передаётся по шинам и т.д. В процессе передачи или хранения в ...
... переходов автомата. 3. Проектирование алгоритма и построение абстрактного автомата арифметико-логического устройства 3.1 Задание и исходные данные Разработка арифметико-логического устройства, выполняющего операцию сложения и вычитания в прямом двоичном коде. Исходные данные: – разрядность операндов – 8 бит; – разрядность результата – 8 бит; – элемент памяти – ПЗУ; – формат ...
0 комментариев