БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра ЭТТ
РЕФЕРАТ на тему:
«Системы АПЧ»
МИНСК, 2008
Для того чтобы лучше разобраться в принципах действия рассматриваемых в последующих главах авторегулировок в радиоприемниках, вначале полезно ознакомиться с некоторыми общими вопросами теории авторегулирования.
Автоматическое регулирование является разделом более общей отрасли науки об управлении — кибернетики, получившей широкое развитие в последние десятилетия. Под управлением понимают совокупность действий, обеспечивающих работу какой-либо системы о условиях достижения заранее заданных результатов. Круг задач, решаемых кибернетикой, весьма обширен и многообразен. Она включает в себя вопросы управления самыми различными объектами от живых организмов до сложных технических систем.
Системы автоматического регулирования позволяют без участия оператора поддерживать заданный режим работы управляемого объекта, например в радиоприемнике постоянство (с заданными отклонениями) уровня выходного сигнала.
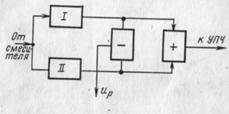
Те параметры объекта, которые подлежат стабилизации или изменению по заданному закону, называют регулируемыми параметрами. В радиоаппаратуре— это прежде всего усиление или настройка гетеродина приемника. Устройства, параметры которого подлежат регулированию, называют объектом регулирования. В приемниках — это каскады усилителя, его частотно-избирательная цепь или настройка гетеродина. Элемент, осуществляющий ту или иную регулировку, называется регулятором (или управителем). На регулятор подается напряжение, содержащее информацию о необходимом его действии ир.
Различают системы АР замкнутого и разомкнутого вида. Как правило, в радиоприемниках применяют замкнутые системы АР. При воздействии на замкнутую систему АР какого-либо внешнего фактора, например сигнала в радиоприемнике, возникает переходный (динамический) процесс. Если этот процесс стремится к определенному установившемуся значению выходного параметра объекта регулирования, т. е. она приходит в равновесие, то система является устойчивой; в противном случае система будет неустойчивой, на ее выходе устанавливаются незатухающие колебания. Такой режим, разумеется, недопустим, поэтому любая система ЛР должна удовлетворить требованиям устойчивости.
Процесс, возникающий в системе после подачи воздействующего на вход сигнала, называется переходным процессом. Его график (рис. 1.) позволяет судить о характере установления выходного напряжения ир при замкнутой цепи АР. В зависимости от схемы ЛР переходный процесс может носить, апериодический (кривая 1) или колебательный характер (кривая 2). На практике чаще предпочтителен первый случай.
Важной характеристикой переходного процесса служит время его установления, которое представляет собой отрезок времени tу, в течение которого выходное напряжение достигнет некоторого наперед заданного значения. Оно часто составляет 0,9 установившегося напряжения на выходе. Время установления всегда выгодно иметь возможно меньшим, что обеспечивает большее быстродействие системы АР. Но это накладывает определенные требования на ее параметры, о чем подробнее сказано ниже.
По принципу действия системы АР разделяют на два вида: статические и астатические. В системах первого вида в установившемся режиме существует зависимость между отклонением регулируемого параметра от заданного значения и начальной ошибкой (при отсутствии системы АР).
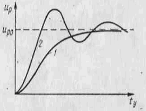
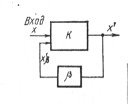
Рис. 1 Переходный динамический процесс: 1—апериодический; 2--колебательный
В системах второго вида отклонение регулируемого параметра равно нулю при любом значении первоначального отклонения.
В системах авторегулировок, применяемых в радиоприемниках, используются почти исключительно статические регуляторы, как наиболее легко реализуемые. Примером астатического регулятора может служить автоподстройка частоты гетеродина путем вращения пластин конденсатора его контура маломощным электродвигателем, управляемым сигналом ошибки. Все другие схемы АР, рассматриваемые в последующих главах, относятся к статическим авторегуляторам, поэтому в дальнейшем при изложении термин «статические» будем опускать.
Для установления связи между первоначальным изменением интересующей нас величины на выходе системы АР (когда ее цепь разомкнута) с изменением той же величины при замкнутой цепи АР введем такие обозначения: х—напряжение на выходе при разомкнутой цепи АР; х' — то же, при замкнутой цепи; К — коэффициент передачи регулируемого объекта (например, усилителя цепи АРУ); β— коэффициент передачи цепи АР.
Тогда, считая систему линейной (что при малых сигналах допустимо), можно составить уравнение
х'=х —х' К β,
Решив его относительно х’ находим х'=х/(1+Кβ) (1)
Произведение Кβ=Кп часто называют петлевым усилением. Поскольку обычно Кβ=Кп >>1, то можно считать х'=х \ Кп
Следовательно, величина петлевого усиления показывает, во сколько раз уменьшается ошибка (напряжение, частота и др.) при замыкании цепи АР в установившемся режиме. Формула (1) окажется полезной при рассмотрении конкретных систем АР в радиоприемниках.
С увеличением петлевого усиления остаточная ошибка уменьшается. Но из этого положения, однако, нельзя делать вывода, что она может быть сделана сколь угодно малой. Оказывается, что во многих случаях при увеличении коэффициента Кп система может оказаться неустойчивой, т. е. перейти в режим автоколебаний. Величина, показывающая, во сколько раз уменьшается ошибка регулируемой величины, называется коэффициентом авторегулирования Кар и приближенно равна значению петлевого усиления. Для систем АР, применяемых в радиоприемниках, нижние Кар практически может достигать десятков, сотен и более.
Необходимость применения автоподстройки частоты в супергетеродинных приемниках
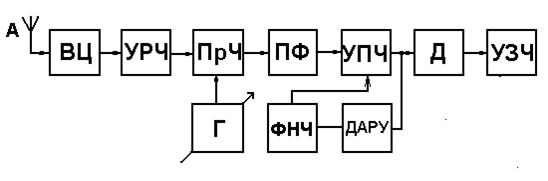
Современные приемники — от простейших любительских до сложных приемных устройств профессионального назначения — выполняются по супергетеродинной схеме. На рисунке приведена структурная схема супергетеродинного приемника (цепь АРУ на схеме не приведена) см. рис. 2.
Напомним принцип действия супергетеродинного приемника. Приходящие от антенны колебания высокой частоты преобразуются в смесителе в сигнал обычно более низкой промежуточной частоты, постоянной для всех принимаемых станций. Для этого на смеситель одновременно с принимаемым сигналом поддается напряжение от гетеродина 3, частота которого перестраивается одновременно с высокочастотным блоком 1. Смеситель представляет собой нелинейный элемент, в котором при подаче двух напряжений (сигнала и гетеродина) образуется ряд комбинационных частот, удовлетворяющих условию
Fn=mfc±nfг где m и n — целые числа (2)
Обычно в смесителях используется так называемая первая разностная частота fп = fс-fг. (3)
Нетрудно видеть, что если частоты fc и fг изменять одновременно на одну и ту же величину, то промежуточная частота fп будет оставаться постоянной.
Это обстоятельство является существенным преимуществом супергетеродинного приемника по отношению к приемнику прямого усиления. В супергетеродинном приемнике имеем возможность осуществить основное усиление и избирательность на постоянной промежуточной частоте. При этом не требуется перестройка контуров УПЧ, количество которых дли получения достаточной избирательности по соседнему каналу может быть довольно значительным (больше четырех). Перестройку же одного контура гетеродина осуществить, несомненно, проще. Кроме того, в УПЧ часто применяют фильтры сосредоточенной селекции (ФСС) с фиксированной настройкой, выполненные и виде электрических (LC), электромеханических и пьезокерамических систем. В таких фильтрах легко реализовать узкую полосу пропускания при хорошей форме АЧХ. Полоса пропускания УПЧ Δfп берется достаточно узкой для реализации хорошей избирательности по соседнему каналу и уменьшения действий помех. На более низкой промежуточной частоте это легче реализовать при той же добротности контуров, чем в усилителе высокой частоты. Полосу пропускания УПЧ желательно иметь равной ширине спектра принимаемого сигнала. Однако, как увидим ниже, на практике сделать это не всегда возможно.
Итак, промежуточная частота fп должна быть постоянной. Из выражения (3) видно, что это можно осуществить при строго постоянных частотах сигнала fс и гетеродина fг. В действительности же эти частоты не остаются строго стабильными во времени. Объясняется это как возможной нестабильностью частоты передатчика (в первую очередь, в небольших связных KB радиостанциях, так и особенно частоты гетеродина, который, как правило, не имеет кварцевой стабилизации, так как ее трудно осуществить в плавно перестраиваемом гетеродине.
Причины нестабильности частоты гетеродина в основном определяются:
1) изменением параметров транзистора при колебаниях температуры;
2) непостоянством напряжения источника питания;
3) уходом во времени значений L и С контура гетеродина в основном за счет климатических факторов, а также вибраций (в подвижной аппаратуре)
Стабильность частоты гетеродина без кварцевой стабилизации в KB диапазоне можно получить порядка 10-3—10-4. При этом частота fn может оказаться на краю полосы пропускания УПЧ или за ее пределами. Для устранения этого явления можно применить ряд мер.
Во-первых, использовать кварцевую стабилизацию частоты гетеродина, которая повышает стабильность по крайней мере в 10 раз, что осуществить достаточно сложно и дорого. Во-вторых, расширять полосу пропускания УПЧ 4—5 раз по сравнению с минимально необходимой, при этом неизбежно увеличивается уровень помех и шумов на выходе приемника. И, наконец, в-третьих использовать в приемнике цепи автоматической подстройки частоты гетеродина АПЧ, что тоже во много раз уменьшает расстройку истинной частоты на выходе смесителя относительно начальной частоты настройки УПЧ (fn).
Последнее оказывается наиболее целесообразным, в силу чего многие из современных приемников различного назначения содержат в своем составе цепь АПЧ, принцип действия и анализ работы которой будут изложены ниже.
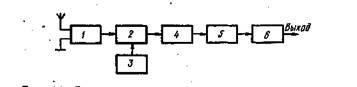
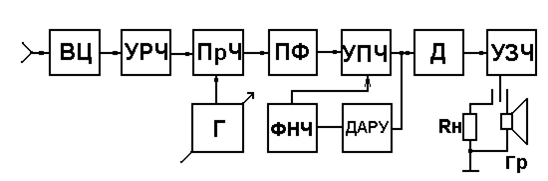
Рис. 2. Структурная схема супергетеродинного приемника: 1.преселектор и УВЧ 2. смеситель 3. гетеродин 4. УПЧ 5. детектор 6.УНЧ или видеоусилитель
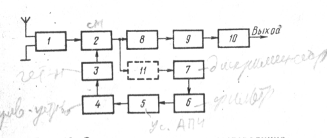
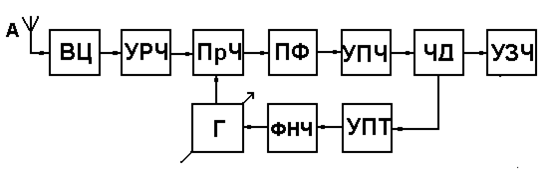
Рис. 3. Структурная схема супергетеродинного приемника с АПЧ: 1-УВЧ; 2 – смеситель; 3- Гетеродин; 4- управляющее устройство; 5-усилитель постоянного тока; 6-фильтр; 7-дикриминатор; 8- УПЧ; 9- детектор сигнала; 10-УНЧ; 11-усилитель промежуточной частоты АПЧ (может и отсутствовать)
Структурная схема и принцип действия систем АПЧ.
Системы АПЧ супергетеродинных приемников относятся к числу автоматических регулировок обратного действия. Возможны два вида автоматической подстройки частоты: частотная (которую принято называть АПЧ) и фазовая (ФАПЧ). Первый вид автоподстройки применяется в радиовещательных приемниках значительно чаще, в силу чего он является основным предметом дальнейшего рассмотрения.
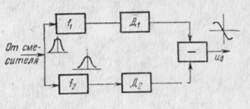
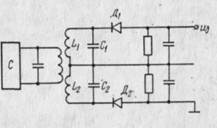
Структурная схема АПЧ приведена на рис. 3. Смеситель 2, дискриминатор 7, фильтр 6, усилитель АПЧ 5, управляющее устройство 4 и гетеродин 3 составляют собой замкнутую цепь авторегулирования. В некоторых случаях для увеличения напряжения, подаваемого на дискриминатор, перед ним включают дополнительный УПЧ (УАПЧ). Однако это усложняет конструкцию приемника. В качестве УАПЧ может быть использован первый каскад УПЧ, который в этом случае должен быть апериодическим, а избирательность УПЧ обеспечивается в последующих каскадах, например фильтром ФСС. В этом варианте напряжение на дискриминатор подается не после смесителя, а с выхода первого каскада УПЧ.
Принцип действия АПЧ состоит в следующем. При точном соответствии частоты на выходе смесителя и настройки УПЧ напряжение па выходе дискриминатора (частотного детектора) равно нулю. При взаимной расстройке этих частот (из-за нестабильности гетеродина) на выходе дискриминатора появляется постоянное регулирующее напряжение, полярность которого зависит от знака указанной расстройки. Это напряжение после фильтра 6 (см. рис. 3) и усилителя постоянного тока 5 подается на управляющее устройство с таким знаком, что оно подстраивает частоту гетеродина 3 в сторону уменьшения ошибки. (Заметим, что усилитель 5 в ряде случаев может отсутствовать, тогда регулирующее напряжение подается непосредственно с фильтра на управляющее устройство. Таким образом, цепь АПЧ всегда стремится уменьшить разницу между истинной промежуточной частотой и настройкой УПЧ.
Примерный вид частотной характеристики дискриминатора показан на рис. 4. Частота настройки дискриминатора f0 (иногда называемая переходной частотой) соответствует нулевому напряжению на выходе. При наличии расстройки, как видно из характеристики, в зависимости от ее знака будет меняться полярность постоянного напряжения на выходе дискриминатора.
Важным показателем для оценки свойств дискриминатора служит крутизна характеристики – Sд (вольт/герц), пропорциональная ее углу наклона: Sд= tgα, ее всегда желательно иметь возможно большей, так как при этом повышает эффективность работы дискриминатора.
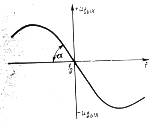
Рис. 4. Частотная характеристика дискриминатора
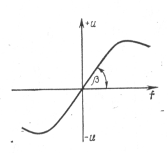
Рис. 5. Частотная характеристика управляющего устройства гетеродином.
Управляющее устройство, подстраивающее частоту гетеродина на нужный номинал имеет совместно с гетеродином частотную характеристику, напоминающую по форме латинскую букву S (рис. 5). Его работа также характеризуется крутизной наклона характеристики в ее средней части (герц/вольт), которую также выгодно повышать.
Для получения возможно более точной автоподстройки переходная частот дискриминатора fo должна совпадать с серединой полосы пропускания УПЧ fn. Однако за счет различных дестабилизирующих факторов (изменение температуры, вибрация и др.) возможно расхождение во времени этих частот. Правда, часто эти дестабилизирующие факторы расстраивают УПЧ и дискриминатор в одинаковую сторону, но не всегда в равной мере. Тогда появляется неизбежная дополнительная ошибка при работе АПЧ.
Значительно более совершенной в этом отношении является цепь АПЧ, которой колебательные контуры дискриминатора и вводной фильтр УПЧ совмещены. В этом случае ошибка за счет рассогласования настроек УПЧи дискриминатора исключается.
ЛИТЕРАТУРА
1. Охрименко А.Е. Основы извлечения, обработки и передачи информации. (В 6 частях). Минск, БГУИР, 2004.
2. Девятков Н.Д., Голант М.Б., Реброва Т.Б.. Радиоэлектроника и медицина. –Мн. – Радиоэлектроника, 2002.
3. Медицинская техника, М., Медицина 1996-2000 г.
4. Сиверс А.П. Проектирование радиоприемных устройств, М., Радио и связь, 2006.
5. Чердынцев В.В. Радиотехнические системы. – Мн.: Высшая школа, 2002.
6. Радиотехника и электроника. Межведоств. темат. научн. сборник. Вып. 22, Минск, БГУИР, 2004.
Похожие работы
... 5. Структурная схема АПЧ с совмещенной многоконтурной избирательной системой Рис.6. Структурная схема радиолокационной станции СВЧ диапазона Особенности построения и работы систем АПЧ импульсных приемников Автоподстройка частоты импульсных приемников издавна применялась в радиолокационных системах, работающих в диапазоне СВЧ на частотах 3000 МГц и выше (λ= 10 см). ...
... мерам противопожарной безопасности. 6 Технико-экономическое обоснование дипломного проектированияВ данном дипломном проекте разрабатывается оптимальный способ модернизации лабораторного стенда, имеющегося на кафедре «Радиотехника». Данный проект представляет определенную ценность для Алматинского Института Энергетики и Связи, поэтому имеет смысл рассчитать рыночную стоимость и себестоимость ...
... не превышает динамического диапазона приемника. Диапазон принимаемых частот – это совокупность частот, на которые может настраиваться приемник, сохраняя в заданных пределах свои основные технические параметры (чувствительность, избирательность и т.д.). Частотная стабильность – это способность приемника сохранять основные технические параметры при настройке на частоту принимаемого сигнала. В ...
... 390 ВА, - сеть 36 в, 4UO Гц 17 ВА, - сеть 27 в, постоянный ток 80 ВА. 4. Режим работы 4.1. Принцип работы РЛС "Гроза" является импульсным радиолокатором сантиметрового диапазона, способным решать различные навигационные задачи. Принцип работы состоит в направленном излучении мощных радиоимпульсов, приема и усиления, отраженных от наземных или ...
0 комментариев