МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ УНИВЕРСИТЕТ
ФАКУЛЬТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
КАФЕДРА ИНФОРМАТИКИ И РАДИОЭЛЕТРОНИКИ
Контрольная работа
по управлению многомерными автоматическими системами
Выполнила: Ратникова С.А.
Заочная форма обучения
Курс V
Специальность 210100
№ зачетной книжки 6001053
Проверил преподаватель:
Работа сдана ____________________
Подпись лица, принявшего работу ____
Подпись студента ______________
Волоколамск 2004 г.
Исходные данные
Структурная схема объекта управления – система автоматического управления второго порядка с одномерным вектором ū-входных воздействий и одномерным вектором y-выходных переменных приведена на рисунке:

|
|
|
![]()
![]() R
R
α11 = 18
α12 = 5
α21 = – 3
α22 = 12
β1 = 1
β2 = – 2
c1 = – 1
c2 = 9
Задание1. Записать уравнение объекта в векторной форме;
2. Исследовать объект управления на устойчивость;
3. Исследовать объект управления на управляемость;
4. Исследовать объект управления на наблюдаемость.
Выполнение работы
![]()
![]()
|
|
|
![]()
![]()
![]()
![]()
![]()
![]()
![]() ū ν Ä – S x y
ū ν Ä – S x y
|
![]()
![]()
![]()
![]() R
R
![]()
![]()
![]()
![]()
ν = ν1 • u
ν2 – 2u
x = x1
x2
ν = 1 • u
– 2
S = ν – R
x = ⌠Sdt
![]()
![]()
R = 18 5
![]()
![]() – 3 12
– 3 12
y = (– 1 9) • x = (– 1 9) • x1 = – x1 + 9x2
x2
![]()
![]()
![]()
![]()
dx/dt = S S = 1 • u – 18 5 • x
– 2 – 3 12
dx/dt = Ax + Du – уравнение объекта
Y = Cx + Du – уравнение выходных переменных
D = 0
u = u1 x = x1 y = y1
x2
A = 18 5 B = 1 C = (– 1 9)
– 3 12 – 2
Исследование объекта управления на устойчивость![]()
![]()
![]()
![]()
![]()
![]() det (A – pE) = 0
det (A – pE) = 0
18 5 – p 0 = 18 – p 5
– 3 12 0 p – 3 12 – p
![]()
![]() 18 – p 5
18 – p 5
– 3 12 – p = (18 – p) (12 – p) – 5 • (– 3) = 216 – 18p – 12p + p2 + 15 = p2 – 30p + 231
p2 – 30p + 231 = 0
p1 = (900 + √–24) / 2 = 15 + √6 j
p2 = (900 – √–24 ) / 2 = 15 – √6 j
Rep1 > 0
Rep2 > 0,
следовательно система неустойчива.
Исследование объекта управления на управляемостьdx/dt = Ax + Bu
Порядок n = 2
Матрица управляемости: R = (B AB)
A • B = 18 5 • 1 = 18 • 1 + 5 • (– 2) = 8
– 3 12 – 2 – 3 • 1 + 12 • (– 2) – 2
![]()
![]() R = 1 8
R = 1 8
– 2 – 27
1 8 = 1 • (–27) – 8 • (– 2) = – 27 + 16 = – 11≠ 0
– 2 – 27
Следовательно r =2 = n
Объект управляем.
Исследование на наблюдаемость
HT = C
CA
C • A = (– 1 9) • 18 5 = –1•18+9•(–3) –1•5+9•12 = (– 45 103)
– 3 12
HT = – 1 9
– 45 103
![]()
![]() – 1 9 = – 103 + 405 = 302 ≠ 0, следовательно r = 2 = n
– 1 9 = – 103 + 405 = 302 ≠ 0, следовательно r = 2 = n
– 45 103
Система наблюдаема.
Похожие работы
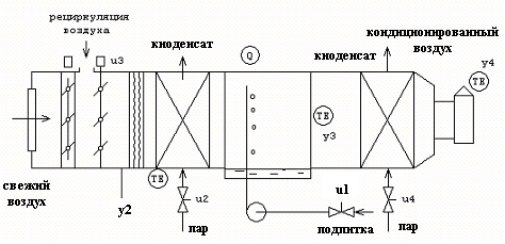


... на расстоянии до 300 м. ADAM-4013 1-канальный модуль аналогового ввода сигнала стермосопротивления Вывод Разработан проект автоматической системы регулирования промышленного кондиционера. Данный проект включает следующие элементы: 1) Математическое обеспечение: разработана математическая модель объекта виде матриц входов, ...
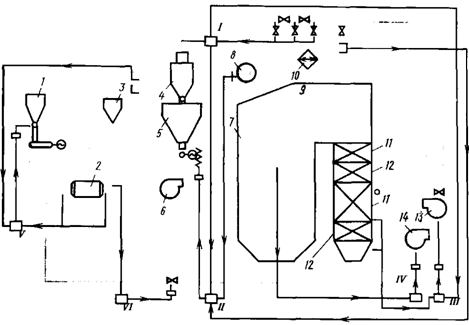
... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
... по соответствующему полю). В окне Конструктора таблиц созданные связи отображаются визуально, их легко изменить, установить новые, удалить (клавиша Del). 1 Многозвенные информационные системы. Модель распределённого приложения БД называется многозвенной и её наиболее простой вариант – трёхзвенное распределённое приложение. Тремя частями такого приложения являются: ...
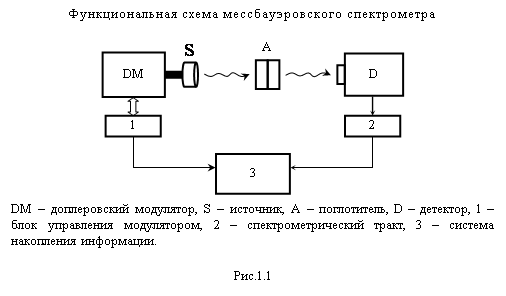
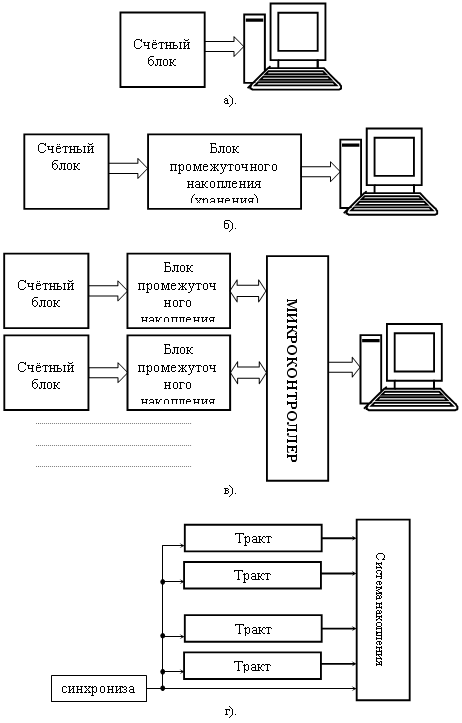
... программирование микроконтроллера, как инструмента накопления данных и управления ресурсами, с учётом необходимой и достаточной степени доступа к конечной аппаратуре. Модуль накопления для задач многомерной мессбауэровской спектрометрии спроектирован с учётом следующих условий: - Синхронизация накопителя с системой доплеровской модуляции осуществляется внешними тактовыми импульсами “старт” и ...
0 комментариев