БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра РТС
РЕФЕРАТ
На тему:
«Цифровые частотные дискриминаторы, фильтры и генераторы опорного сигнала»
МИНСК, 2008
Цифровые частотные дискриминаторы
Известны два типа частотных дискриминаторов:
- цифровая реализация аналогового прототипа дискриминатора с расстроенными контурами;
- частотный дискриминатор, реализующий принцип частотомера или периодомера.
Схема цифрового частотного дискриминатора с расстроенными контурами приведена на рис. 1 +
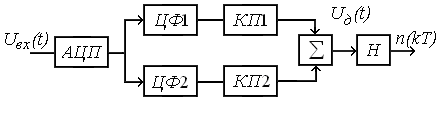
Рис. 1 Цифровой частотный дискриминатор
АЦП преобразует сигнал в код.Частота выборки определяется спектром сигнала. Далее сигнал в цифровом виде поступает на два цифровые фильтра со смещенными резонансными частотами, являющиеся аналогом расстроенных контуров; смещение резонансных частот должно обеспечивать необходимую крутизну дискриминационной характеристики.
Рис. 2 иллюстрирует формирование дискриминационной характеристики.
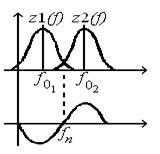
Рис.2. Формирование дискриминационной характеристики:
z1(f) и z2(f) – модули комплексного сопротивления фильтров
Далее сигнал подается на квадратичные преобразователи, сумматор и накопитель, позволяющий накапливать выборки входного сигнала.
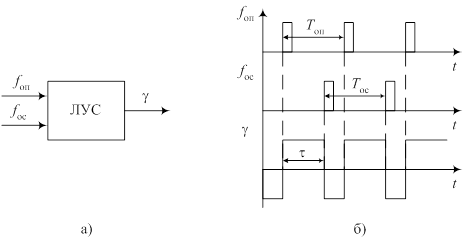
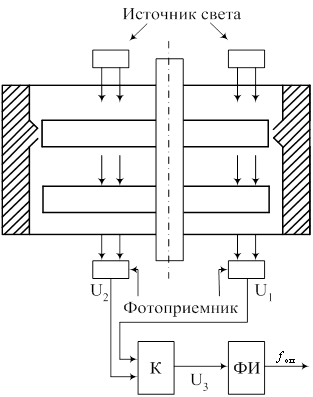
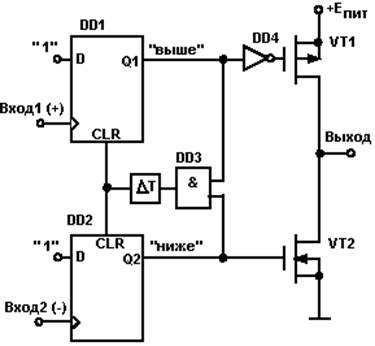
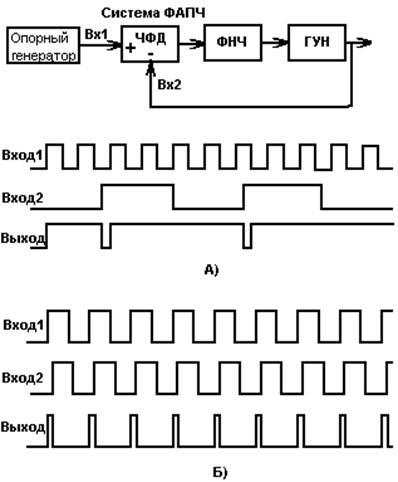
Дискриминатор, использующий принцип счета пересечений нулевого уровня (рис. 3) функционирует на принципе частотометра, используя метод счета числа пересечений сигналом нулевого уровня за фиксированный интервал времени и сравнения числа с эталоном.
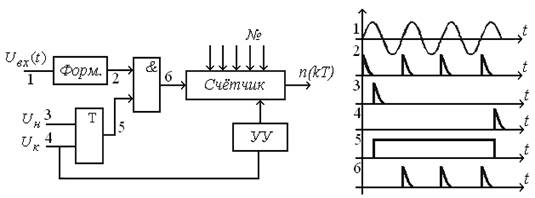
Рис. 3. Схема и временные диаграммы работы частотного дискриминатора
Число накапливаемых импульсов на интервале ![]()
![]() ;
; ![]() ;
;![]() ,
,
где ![]() – время накопления.
– время накопления.
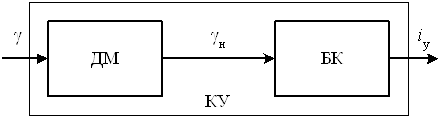
За время ![]() подсчитывается число пересечений N и сравнивается с эталонным числом N0, предварительно записанным в счетчик. Далее код разности чисел считывается со счетчика и подается на цифровой фильтр. Устройство управления обеспечивает сброс счетчика и запись нового числа. Дискрет квантования частоты можно определить следующим образом
подсчитывается число пересечений N и сравнивается с эталонным числом N0, предварительно записанным в счетчик. Далее код разности чисел считывается со счетчика и подается на цифровой фильтр. Устройство управления обеспечивает сброс счетчика и запись нового числа. Дискрет квантования частоты можно определить следующим образом
Пусть количество импульсов, записанных в счетчик с частотой F1, равно
![]() , (1)
, (1)
а число импульсов с частотой F2 равно
![]() (2)
(2)
Вычтем (1) из (2):
![]() (3)
(3)
Из выражения (3) определим дискрет квантования частоты, определяющий точность преобразования частоты в код
![]()
![]() =
= ![]() .
.
Уменьшение дискрета квантования обеспечивается при использовании принципа периодомера, при котором определяется интервал времени соответствующий фиксированному числу периодов входного сигнала посредством заполнения этого интервала счетными импульсами высокой частоты. Затем этот интервал сравнивается с эталонным, соответствующим переходной частоте дискриминатора.
Цифровые фильтры
Синтез передаточной функции цифрового фильтра. Для синтеза передаточной функции цифрового фильтра часто используется метод дискретизации аналогового фильтра-прототипа.
На основе теории аналоговых фильтров определяется передаточная функция, удовлетворяющая заданным требованиям. Затем производится дискретизация в соответствии с приведенной схемой (рис. 4). Непрерывный фильтр преобразуется в дискретную систему путем включения на его входе импульсного элемента и формирующего фильтра. Включение на входе импульсного элемента и формирующего фильтра обеспечивает подобие процессов на выходе цифрового фильтра и аналогового фильтра-прототипа.
![]()
Рис. 4. Схема дискретизации аналогового фильтра-прототипа
Передаточная функция цифрового фильтра определяется как z-изображение передаточной функции полученного соединения звеньев:
![]()
При использовании в качестве формирующего фильтра фиксатора:
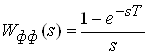 ;
;  .
.
Второй метод синтеза на основе использования передаточной функции аналогового фильтра-прототипа состоит в замене операций непрерывного дифференцирования и интегрирования операциями дискретного дифференцирования и интегрирования.
Аналоговое интегрирование производится в соответствии с выражением  , (4)
, (4)
где 1/р ─ оператор интегрирования;
а дискретное интегрирование по методу прямоугольников ─ в соответствии с выражением
![]() , (5)
, (5)
где T – основание прямоугольника (рис. 5).
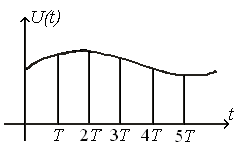
Рис. 5. Дискретное интегрирование по методу прямоугольников
Введем оператор запаздывания с, в результате выражение (6) запишется в виде:
![]() , (6)
, (6)
где ![]() .
.
Сравнив (4) и (6) определим эквивалентные операторы интегрирования и дифференцирования.
Чтобы определить передаточную функцию цифрового фильтра необходимо произвести следующие замены:
- операция дифференцирования ─ ![]() ;
;
- операция интегрирования ─ ![]() .
.
Произведя замену операторов (![]() ), получим соответствие:
), получим соответствие:
 .
.
Аналогично производится замена переменной s на переменную z в соответствии с равенством
![]()
Интегрирование методом трапеций, выполняемое в соответствии с равенством
![]() ,
,
также позволяет определить соответствующие операторы.
Реализация цифровых фильтров. Цифровые фильтры могут быть реализованы в прямой, канонической, параллельной и последовательной формах.
Прямая форма базируется на разностном уравнении
 ,
,
где ![]() – код числа на выходе фильтра;
– код числа на выходе фильтра; ![]() – код числа на входе фильтра;
– код числа на входе фильтра;
ai, bi – коэффициенты.
Структурная схема фильтра представлена на рис. 6.
Каноническая форма отличается тем, что для задержки входной и выходной последовательностей используется одна линия задержки.
При последовательной форме реализации сложные звенья или сложная передаточная функция разбивается на ряд простых звеньев, так чтобы каждое звено описывалось дифференциальным уравнением не выше второго порядка. Передаточные функции этих звеньев, включенных последовательно, образуют необходимую передаточную функцию фильтра.
При параллельной форме реализации сложные передаточные функции фильтров формируются как сумма передаточных функций звеньев, включенных параллельно; каждое звено описывается дифференциальным уравнением не выше второго порядка. Каждое из таких элементарных звеньев реализуется по прямой или канонической форме.
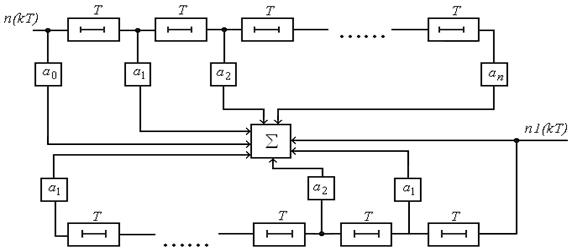
Рис.6. Схема цифрового фильтра
В качестве фильтров часто используют реверсивные или обычные двоичные счетчики. При этом используются следующие схемы включения:
- реверсивный счетчик без сброса;
- реверсивный счетчик со сбросом после переполнения;
- реверсивный счетчик с накоплением и сбросом
. Реверсивный счетчик без сброса является цифровым интегратором. Определим его передаточную функцию и операторный коэффициент передачи.
где ![]() .
.
Произведя замену переменной
![]() ,
,
получим передаточную функцию
![]()
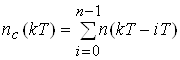
На счетчик с накоплением и сбросом за время ![]() на вход поступает r чисел с периодом Т, затем содержимое счетчика сбрасывается. Эквивалентная схема счетчика представляет последовательное соединение элемента с конечной памятью THи дискретного элемента (рис. 7).
на вход поступает r чисел с периодом Т, затем содержимое счетчика сбрасывается. Эквивалентная схема счетчика представляет последовательное соединение элемента с конечной памятью THи дискретного элемента (рис. 7).
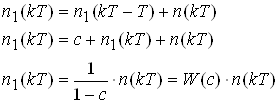
Разностное уравнение, описывающее работу счетчика:
 ;
;
![]() ,
,
где W(c) – передаточная функция:
 .
.
Дискретный элемент замыкается через время TH.

Рис. 7. Эквивалентная схема реверсивного счетчика с накоплением и сбросом
Цифровые генераторы опорного сигнала
Генератор опорного сигнала в цифровых системах фазовой и частотной синхронизации реализует функцию синтезатора частот. Синтезируемая частота определяется выражением
![]() , (7)
, (7)
где f – частота выходного сигнала генератора; f0 – номинальная частота генератора; Δf – дискрет перестройки по частоте;n1 – код управления, поступающий с выхода фильтра.
Такой генератор может реализован с использованием цифро-аналогового преобразователя и генератора, управляемого напряжением. Недостатком такого генератора, называемого генератором с непосредственным управлением, является невысокая стабильность при обеспечении достаточного диапазона перестройки по частоте. Использование для повышения стабильности кварцевой стабилизации существенно снижает диапазона перестройки.
Поэтому широкое применение нашли генераторы с косвенным управлением частотой, позволяющие избавиться от этого недостатка. При этом можно использовать кварцевую стабилизацию частоты и одновременно обеспечить широкий диапазон перестройки частоты.
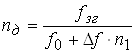
Генератор на основе управляемого делителя (рис. 8).
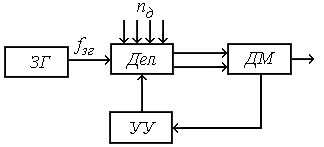
Рис. 8. Цифровой управляемый генератор
Дешифратор ДШ определяет нулевое состояние, при этом на выходе формируется импульс, по которому с помощью устройства управления УУ в счетчик записывается число nд. Если в качестве делителя используется реверсивный счетчик, то импульсы с частотой fзг поступают на вход вычитания, в результате чего число nд считывается до нуля. На выходе формируется импульсная последовательность с частотой f:
 . (8)
. (8)
Недостатком является нелинейная зависимость частоты от кода nд.
Для обеспечения линейной зависимости необходимо производить пересчет управляющего кода. Для определения формулы пересчета приравняем выражения (7) и (8):
 . (9)
. (9)
Из выражения (9) находим nд:
 .
.
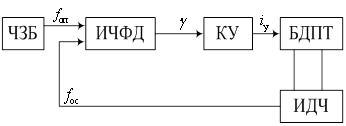
Цифровой опорный генератор с управляемым дискретным фазовращателем (рис.9.) Высокостабильный кварцевый задающий генератор формирует последовательность импульсов, которая поступает на вход устройства добавления и исключения импульсов. Исключение или добавление импульса в последовательность приводит к сдвигу фазы на 2π. Уменьшение дискрета подстройки достигается подключением делителя, который формирует опорный сигнал. В результате дискрет подстройки по фазе составит  .
.
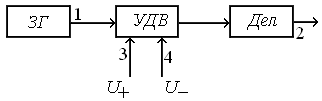
Рис. 9. Цифровой опорный генератор с управляемым дискретным фазовращателем
Генератор опорного сигнала для системы слежения за задержкой импульсного сигнала. При использовании в качестве опорного сигнала последовательности следящих импульсов основным элементом опорного генератора является преобразователь код-временная задержка. Этот преобразователь преобразует число n1 , формируемое в фильтре, во временную задержку следящих импульсов. Преобразование кода во временную задержку реализуется на управляемой линии задержки или счетчике-формирователе. Рассмотрим схему, выполненную на счетчике-формирователе (рис. 10).
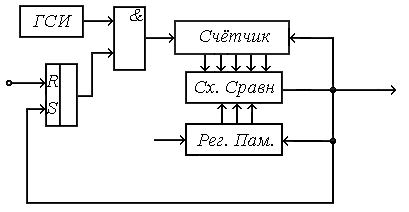
Рис. 10. Генератор опорного сигнала для системы слежения за задержкой импульсного сигнала
В регистр памяти записывается код ![]() , соответствующий оценке задержки.
, соответствующий оценке задержки.
Синхроимпульсом, связанным по времени с излучением зондирующего импульса, RS – триггер устанавливается в состояние «0». При этом на вход схемы И подается разрешающий уровень напряжения и с генератора счетных импульсов проходят импульсы на вход счетчика. Как только число в счетчике сравнивается с числом ![]() (рис.11),
(рис.11),
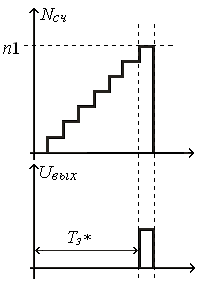
Рис. 11. Временные диаграммы
на выходе схемы сравнения формируется импульс запуска генератора следящих импульсов. Этим же импульсом восстанавливается начальное состояние триггера и обнуляется счетчик.
Выходной величиной преобразователя является временной сдвиг запускающих импульсов, равный
Тз = n1Tcч,
где Tcч ─ период счетных импульсов, определяющий шаг квантования и точность преобразователя
ЛИТЕРАТУРА
1. Коновалов. Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Высш.шк., 2000.
2. Радиоавтоматика: Учеб. пособие для вузов./ Под ред. В.А. Бесекерского.- М.: Высш. шк., 2005.
3.. Первачев. С.В Радиоавтоматика: Учебник для вузов.- М.: Радио и связь, 2002.
4. Цифровые системы фазовой синхронизации/ Под ред. М.И. Жодзишского – М.: Радио, 2000
Похожие работы
... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
... разработки осуществлялись следующие виды работ: - уяснение технического задания и ознакомление с существующими аналогами проектируемого блока. - разработка схемы структурной блока - разработка схемы электрической принципиальной блока - разработка сборочного чертежа блока 6.2 Безопасность проекта При выполнении каждого вида работ существуют факторы влияющие как на ...
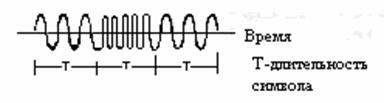
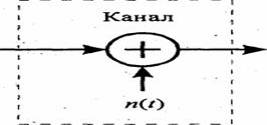
... за которым следует устройство дискретизации (рисунок 4.2), подастся известный сигнал s(t) плюс шум AWGN n(t). 4.4 Межсимвольная интерференция На рисунке 4.3 а) представлены фильтрующие элементы типичной системы цифровой связи. В системе - передатчике, приемнике и канале - используется множество разнообразных фильтров (и реактивных элементов, таких как емкость и индуктивность). В передатчике ...
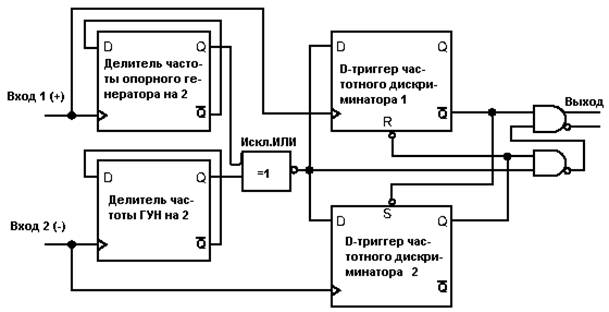
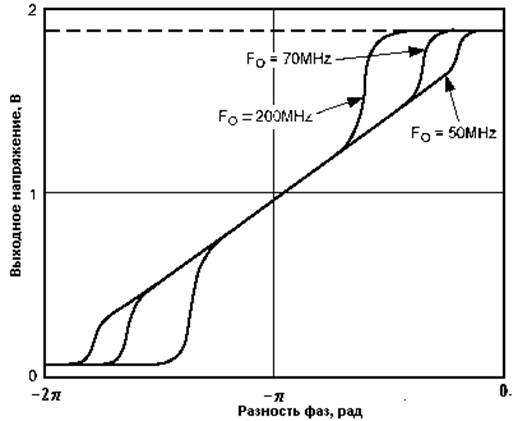
... Рис. 4 Вид характеристики такого ЧФД показан на рис. 4., где видны зоны нечувствительности и нелинейности в зависимости от рабочей частоты детектора. 2. Цифровые элементы систем регулирования амплитуды колебаний К таким элементам относятся детекторы амплитуды колебаний (detector-controller) и усилители ВЧ/СВЧ с программно регулируемым коэффициентом усиления. Кратко ознакомим читателя с их ...
0 комментариев