Министерство образования РФ
Саратовский государственный технический университет
Кафедра "Приборостроение"
Курсовая работа
по курсу
"Системы автоматизированного проектирования и конструирования"
на тему "Моделирование свойств интегрирующего гироскопа"
Выполнил: Поляков А.А.
студент гр. ПБС-41
Проверил: Здражевский Р.А.
Саратов 2003
Содержание
Постановка задачи
Назначение и принцип действия ИГ
Уравнения движения ИГ
Математическое моделирование переходных процессов
Список литературы
Постановка задачи
Цель данной работы - математическое моделирование (с применением ЭВМ) свойств интегрирующего гироскопа (ИГ), а также краткое теоретическое описание его устройства, назначения, принципа действия и особенностей конструкции с приведением уравнений движения.
Под моделированием здесь понимается построение графиков переходных процессов и логарифмических частотных характеристик.
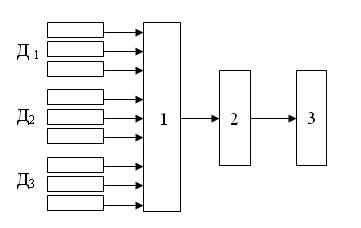
Кроме того, была поставлена задача моделирования не просто отдельного прибора, а системы из трех связанных ИГ, перекрестные связи между которыми были учтены при формировании входных сигналов соответствующих гироскопов.
Назначение и принцип действия ИГ
Интегрирующий гироскоп предназначен для измерения малых углов поворота основания и применяется в качестве чувствительного элемента индикаторно-силового гиростабилизатора, а также в системах стабилизации и управления летательными аппаратами.
Интегрирующий гироскоп представляет собой двухстепенный гироскоп с демпфирующим устройством, которое создает момент сил вязкого трения вокруг оси гироузла.
Демпфирующие устройства бывают пневматическими, жидкостными и электрическими.
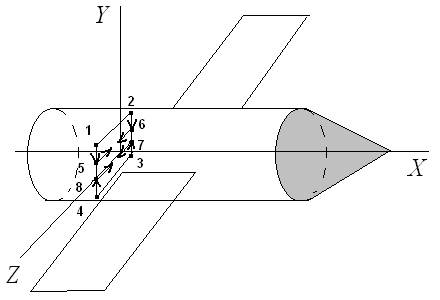
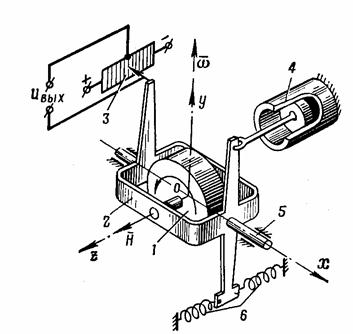
Последние реализуются в виде системы с обратной связью, состоящей из датчика угла, усилителя, дифференцирующего звена, датчика момента (рис.1).
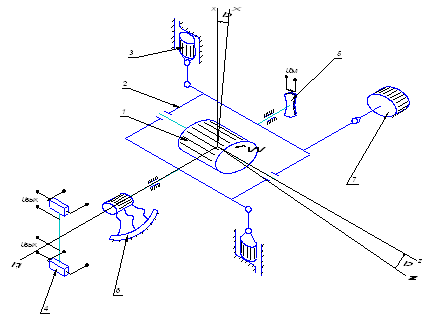
Рис.1. Принципиальная кинематическая схема интегрирующего гироскопа.
1 - гиромотор;
2 - рама;
3 - пневматический демпфер;
4 - потенциометрический датчик угла;
5 - датчик момента;
6 - токоподводящее устройство;
7 - арретирующий электромагнит.
Наибольшее распространение получили ИГ с гидростатической разгрузкой опор гироузла, который выполняется в виде поплавковой камеры с гиромотором.
Демпфирующий момент возникает в основном за счет момента сил вязкого трения при движении поплавка в жидкости; зазор между корпусом и поплавком выполняют малым: δ=0.1…0.2 мм. Такие ИГ называют поплавковыми (ПИГ).
Принцип действия ИГ основан на использовании свойств двухстепенного гироскопа, у которого при вращении основания прибора с угловой скоростью Ωосн возникает гироскопический момент
![]() ,
,
под действием которого гироузел поворачивается относительно корпуса с угловой скоростью ![]() .
.
Демпфирующее устройство создает вокруг оси гироузла момент ![]() , где D - удельный демпфирующий момент.
, где D - удельный демпфирующий момент.
В установившемся режиме измерений гироскопический момент ![]() уравновешивается демпфирующим моментом
уравновешивается демпфирующим моментом ![]() .
.
При малых β справедливо равенство:
|
| (1) |
где Uвых - снимаемое с датчика угла напряжение;
Кду - крутизна характеристики датчика угла;
i=H/D - передаточное число ИГ;
∆Ψ - угол поворота основания;
h=Кду Н/D - крутизна выходной характеристики, или чувствительность ИГ.
При анализе погрешностей ИГ необходимо учитывать нестабильность ∆h чувствительности, величина которой зависит от нестабильности кинетического момента ∆Н, удельного демпфирующего момента ∆D, крутизны характеристики датчика угла ∆Кду и определяется выражением:
|
| (2) |
Для достижения стабильности чувствительности в ИГ используют синхронные гистерезисные гиромоторы с системой управления по частоте вращения ротора, обеспечивающей стабильность частоты его собственного вращения на уровне сотых долей процента, прецизионные датчики угла с разрешающей способностью, равной долям угловой секунды, а также применяют специальные меры по повышению стабильности величины удельного демпфирующего момента.
Уравнения движения ИГПри анализе дифференциальных уравнений движения двухстепенного гироскопа выберем систему координат Оξηζ, связанную с его основанием; Оxyz - систему осей Резаля, связанную с гироузлом и являющуюся системой главных центральных осей инерции ротора и рамки (поплавка).
В начальном положении считаем ![]() ; оси Oy (или Oy1 для платформы гиростабилизатора) и Оζ совпадают. Оси Oy и Ox - соответственно измерительная (входная) и ось (выходная) ИГ.
; оси Oy (или Oy1 для платформы гиростабилизатора) и Оζ совпадают. Оси Oy и Ox - соответственно измерительная (входная) и ось (выходная) ИГ.
Воспользуемся уравнениями движения двухстепенного гироскопа и запишем их для ИГ с абсолютной угловой скоростью Ωосн {Ωξ, Ωη, Ωζ}:
|
| (3) |
где А, С - экваториальный и осевой моменты инерции ротора;
А1, В1, С1 - моменты инерции поплавка относительно осей Ox, Oy, Oz соответственно.
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() - собственный кинетический момент гироскопа;
- собственный кинетический момент гироскопа;
![]() ,
,
где ![]() - возмущающие (вредные) моменты, действующие вокруг оси Ох (моменты трения, сил тяжести и инерционных сил при разбалансировке гироузла, тяжения токопроводов и датчика угла и др.);
- возмущающие (вредные) моменты, действующие вокруг оси Ох (моменты трения, сил тяжести и инерционных сил при разбалансировке гироузла, тяжения токопроводов и датчика угла и др.);
![]() - управляющий момент, развиваемый датчиком момента с целью компенсации погрешностей гироскопа или управления платформой ГС.
- управляющий момент, развиваемый датчиком момента с целью компенсации погрешностей гироскопа или управления платформой ГС.
Полагая в (3) ![]() , получим следующее дифференциальное уравнение движения ИГ:
, получим следующее дифференциальное уравнение движения ИГ:
|
| (4) |
где А0=А+А1 - момент инерции гироузла относительно оси Ох.
Левая часть (4) характеризует собственное движение гироскопа.
В правой части содержатся члены, определяемые моментами: возмущающими ![]() , гироскопическим от перекрестной угловой скорости Ωη, инерционными от
, гироскопическим от перекрестной угловой скорости Ωη, инерционными от ![]() ,
, ![]() ,
, ![]() , которые вносят погрешности в измерение угла ∆Ψ поворота основания вокруг оси Оζ.
, которые вносят погрешности в измерение угла ∆Ψ поворота основания вокруг оси Оζ.
Рассмотрим движение гироскопа при малых β и отсутствии возмущающих и управляющих моментов:
|
| (5) |
Передаточная измерительная функция ИГ в соответствии с (5) имеет вид:
![]() , (6)
, (6)
где T=A0 /D - постоянная времени ИГ как апериодического звена. При
![]()
![]()
представляет собой передаточную функцию интегрирующего звена.
Амплитудные и фазовые частотные характеристики ИГ определяются в соответствии с выражением (6) для ![]() :
:
|
| (7) |
Будем рассматривать систему из трех ИГ, между которыми действуют перекрестные связи.
Для упрощения процесса моделирования заменим эти связи подачей на вход не единичной ступенчатой функции, а более сложной, в пространстве, представляющей собой спираль.
Практически же на вход каждого из ИГ будем подавать проекцию данного сигнала на соответствующую плоскость (Oxy, Oxz, Oyz).
Кроме того, по уравнениям (7) можно построить графики логарифмических частотных характеристик (ЛАЧХ и ЛФЧХ).
Производя соответствующие вычисления и построения (с применением Matlab 6.5), получаем следующие графики (рис.2 - 6).
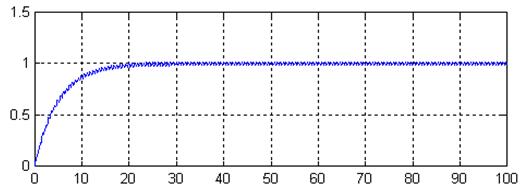
Рис.2. Переходный процесс в ИГ при подаче на вход гармонического сигнала вида f (t) = sin10t.
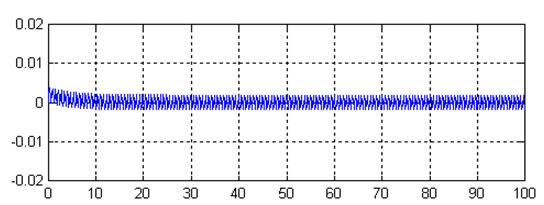
Рис.3. Переходный процесс в ИГ при подаче на вход гармонического сигнала вида f (t) =0.1cos10t.
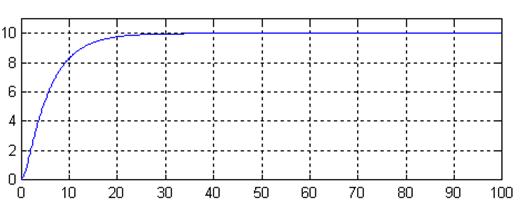
Рис.4. Переходный процесс в ИГ при подаче на вход гармонического сигнала вида f (t) = e-t.
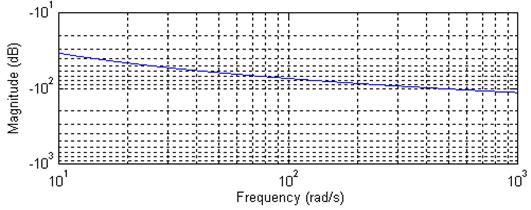
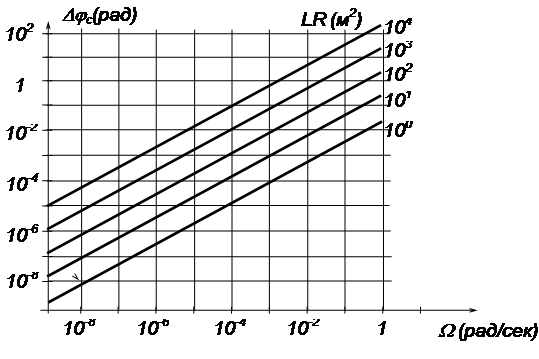
Рис.5. Логарифмическая амплитудно-частотная характеристика.
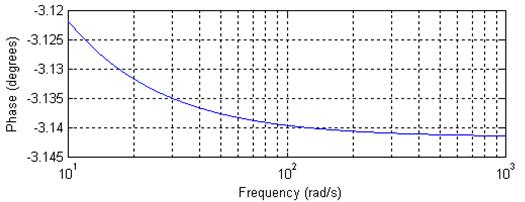
Рис.6. Логарифмическая фазочастотная характеристика.
По построенным графикам можно сделать вывод об устойчивости промоделированной системы.
Список литературы
1. Гироскопические системы. Гироскопические приборы и системы. / Под ред. Д.С. Пельпора. - М.: Высш. шк., 1988.
2. Одинцов А.А. Теория и расчет гироскопических приборов. - Киев: Вища школа, 1985.
3. Пельпор Д.С., Осокин Ю.А., Рахтеенко Е.Р. Гироскопические приборы систем ориентации и стабилизации. - М.: Машиностроение, 1977.
Похожие работы
... , может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей. Таким образом разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей. В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов. ...



... калькуляции представлены в табл.4.2. Ленточный график работ 5. Безопасность жизнедеятельности и охрана труда Дипломная работа посвящена анализу погрешностей волоконно-оптического гироскопа. В ходе ее выполнения были проведены необходимые расчеты и сделаны выводы, которые могут послужить материалом для ...
... виброционных гироскопов, и некоторые другие. Вырабатываемые этими приборами сигналы поступают на вход вычислительного устройства (ВУ), где они соответствующим образом преобразуются и интегрируются. Бесплатформенные системы ориентации, основанные на применении датчиков угловых скоростей. Обычно в составе БСО используется блок чувствительных элементов, состоящих из трех ДУС, оси чувствительности ...
... Вселенной. 5. Проблемы ОТО 5.1 Проблема энергии Так как энергия, с точки зрения математической физики, представляет собой величину, сохраняющуюся из-за однородности времени[53], а в общей теории относительности, в отличие от специальной, вообще говоря, время неоднородно[~ 4], то закон сохранения энергии может быть выражен в ОТО только локально, то есть в ОТО не существует такой ...
0 комментариев