Промышленный робот - автоматическая машина, состоящая из манипулятора и устройства программного управления его движением, предназначенная для замены человека при выполнении основных и вспомогательных операций в производственных процессах.
Манипулятор - совокупность пространственного рычажного механизма и системы приводов, осуществляющая под управлением программируемого автоматического устройства или человека-оператора действия (манипуляции), аналогичные действиям руки человека.
Назначение и область применения
Промышленные роботы предназначены для замены человека при выполнении основных и вспомогательных технологических операций в процессе промышленного производства. При этом решается важная социальная задача - освобождения человека от работ, связанных с опасностями для здоровья или с тяжелым физическим трудом, а также от простых монотонных операций, не требующих высокой квалификации. Гибкие автоматизированные производства, создаваемые на базе промышленных роботов, позволяют решать задачи автоматизации на предприятиях с широкой номенклатурой продукции при мелкосерийном и штучном производстве. Копирующие манипуляторы, управляемые человеком-оператором, необходимы при выполнении различных работ с радиоактивными материалами. Кроме того, эти устройства незаменимы при выполнении работ в космосе, под водой, в химически активных средах. Таким образом, промышленные роботы и копирующие манипуляторы являются важными составными частями современного промышленного производства. Также они используются в лесной промышленности для погрузки и разгрузки пачек деревьев.
Основные понятия и определения. Структура манипуляторов
Формула строения - математическая запись структурной схемы манипулятора, содержащая информацию о числе его подвижностей, виде кинематических пар и их ориентации относительно осей базовой системы координат (системы, связанной с неподвижным звеном).
Движения, которые обеспечиваются манипулятором, делятся на:
· глобальные (для роботов с подвижным основанием) - движения стойки манипулятора, которые существенно превышают размеры механизма;
· региональные (транспортные) - движения, обеспечиваемые первыми тремя звеньями манипулятора или его "рукой", величина которых сопоставима с размерами механизма;
· локальные (ориентирующие) - движения, обеспечиваемые звеньями манипулятора, которые образуют его "кисть", величина которых значительно меньше размеров механизма.
В соответствии с этой классификацией движений, в манипуляторе можно выделить два участка кинематической цепи с различными функциями: механизм руки и механизм кисти. Под "рукой" понимают ту часть манипулятора, которая обеспечивает перемещение центра захвата - точки М (региональные движения захвата); под "кистью" - те звенья и пары, которые обеспечивают ориентацию захвата (локальные движения захвата).
Рассмотрим структурную схему антропоморфного манипулятора, то есть схему которая в первом приближении соответствует механизму руки человека (рис.1)
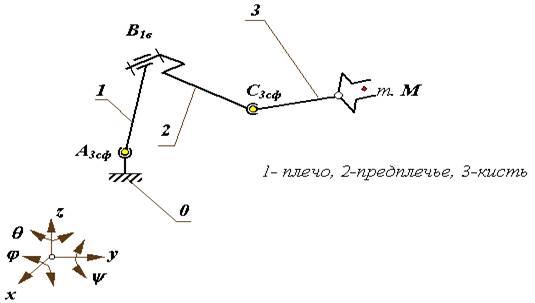
Рисунок 1. Схема манипулятора.
Этот механизм состоит из трех подвижных звеньев и трех кинематических пар: двух трехподвижных сферических А3сф и С3сф и одной одноподвижной вращательной В1в.
Рабочее пространство манипулятора - часть пространства, ограниченная поверхностями огибающими к множеству возможных положений его звеньев.
Зона обслуживания манипулятора - часть пространства соответствующая множеству возможных положений центра схвата манипулятора. Зона обслуживания является важной характеристикой манипулятора. Она определяется структурой и системой координат руки манипулятора, а также конструктивными ограничениями наложенными относительные перемещения звеньев в КП.
Подвижность манипулятора W - число независимых обобщенных координат однозначно определяющее положение захвата в пространстве:
или для незамкнутых кинематических цепей:
Маневренность манипулятора М - подвижность манипулятора при зафиксированном (неподвижном) захвате:
![]()
Структура кинематической цепи манипулятора должна обеспечивать требуемое перемещение объекта в пространстве с заданной ориентацией. Для этого необходимо, чтобы схват манипулятора имел возможность выпонять движения минимум по шести координатам: трем линейным и трем угловым. Рассмотрим на объекте манипулирования точку М, которая совпадает с центром схвата. Положение объекта в неподвижной (базовой) системе координат 0x0y0z0 определяется радиусом-вектором точки М и ориентацией единичного вектора с началом в этой точке. В математике положение точки в пространстве задается в одной из трех систем координат:
· прямоугольной декартовой с координатами xM, yM, zM;
· цилиндрической с координатами rsM, j M, zM;
· сферической с координатами rM, j M, q M.
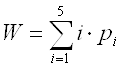
Ориентация объекта в пространстве задается углами a, b и g, которые вектор ориентации образует с осями базовой системы координат. На рис. 2 дана схема шести подвижного манипулятора с вращательными кинематическими парами с координатами объекта манипулирования.
Рисунок 2. Схема шести подвижного манипулятора с вращательными кинематическими парами с координатами объекта манипулирования.
При структурном синтезе механизма манипулятора необходимо учитывать следующее:
· кинематические пары манипуляторов снабжаются приводами, включающими двигатели и тормозные устройства, поэтому в схемах манипуляторов обычно используются одноподвижные кинематические пары: вращательные или поступательные;
· необходимо обеспечить не только заданную подвижность свата манипулятора, но и такую ориентацию осей кинематических пар, которая обеспечивала необходимую форму зоны обслуживания, а также простоту и удобство программирования его движений;
· при выборе ориентации кинематических пар необходимо учитывать расположение приводов (на основании или на подвижных звеньях), а также способ уравновешивания сил веса звеньев.
Задачи механики манипуляторов
К основным задачам механики манипуляторов можно отнести:
· разработку методов синтеза и анализа исполнительных механизмов (включая механизмы приводов);
· программирование движения манипулятора;
· расчет управляющих усилий и реакций в КП;
· уравновешивание механизмов манипуляторов;
· другие задачи.
Эти задачи решаются на базе общих методов исследования структуры, геометрии, кинематики и динамики систем с пространственными многоподвижными механизмами. Каждая из рассматриваемых задач может быть сформулирована как прямая (задача анализа) или как обратная (задача синтеза). При определении функций положения механизма, в прямой задаче находят закон изменения абсолютных координат выходного звена по заданным законам изменения относительных или абсолютных координат звеньев. В обратной - по заданному закону движения схвата находят законы изменения координат звеньев, обычно, линейных или угловых перемещений в приводах. Решение обратной задачи или задачи синтеза более сложно, так как часто она имеет множество допустимых решений, из которых необходимо выбрать оптимальное. В обратной задаче кинематики по требуемому закону изменения скоростей и ускорений выходного звена определяются соответствующие законы изменения скоростей и ускорений в приводах манипулятора. Обратная задача динамики заключается в определении закона изменения управляющих сил и моментов в приводах, обеспечивающих заданный закон движения выходного звена.
Кинематический анализ механизма манипулятора
Первая и основная задача кинематики - определение функции положения. Для пространственных механизмов наиболее эффективными методами решения этой задачи являются векторный метод и метод преобразования координат. При решении прямой задачи о положении захвата манипулятора обычно используют метод преобразования координат. Из множества методов преобразования координат [ 1, 2 ] , которые отличаются друг от друга правилами выбора осей локальных систем координат, для манипуляторов обычно используется метод Денавита и Хартенберга.
Опишем два вида матриц:
· матрицы М, определяющие отношение между системами координат соседних звеньев;
· матрицы Т, определяющие положение и ориентацию каждого звена механизма в неподвижной или базовой системе координат.
Воспользуемся однородными координатами трехмерного проективного пространства РR3, в которых движение евклидова пространства R3 можно представить линейным преобразованием:
![]()
где: Мij - матрица 4x4 вида
![]()
![]() Это преобразование эквивалентно преобразованию в эвклидовом пространстве где .То есть преобра-зованию, которое включает поворот, определяемый матрицей Uij размерностью 3х3, и параллельный перенос, задаваемый вектором размерностью 3. В однородном пространстве положение точки будут определять не три x, y и z, а четыре величины x', y', z' и t', которые удовлетворяют следующим соотношениям:
Это преобразование эквивалентно преобразованию в эвклидовом пространстве где .То есть преобра-зованию, которое включает поворот, определяемый матрицей Uij размерностью 3х3, и параллельный перенос, задаваемый вектором размерностью 3. В однородном пространстве положение точки будут определять не три x, y и z, а четыре величины x', y', z' и t', которые удовлетворяют следующим соотношениям:
x = x'/t', y = y'/t', z = z'/t'.
Обычно принимают t'=1. У матрицы поворота Uij элементами uij являются направляющие косинусы углов между новой осью i и старой осью j. Вектор ![]() - трехмерный вектор, определяющий положение начала новой системы координат i в старой системе j. Выбор расположения осей должен соответствовать решаемой задаче. При решении задачи о положениях необходимо: в прямой задаче определить положение выходного звена как функцию перемещений в приводах, в обратной - заданное положение выходного звена представить как функцию перемещений в приводах. Выбор расположения и ориентации локальных систем координат должен обеспечивать выполнение этих задач. При использовании метода Денавита и Хартенберга оси координат располагаются по следующим правилам:
- трехмерный вектор, определяющий положение начала новой системы координат i в старой системе j. Выбор расположения осей должен соответствовать решаемой задаче. При решении задачи о положениях необходимо: в прямой задаче определить положение выходного звена как функцию перемещений в приводах, в обратной - заданное положение выходного звена представить как функцию перемещений в приводах. Выбор расположения и ориентации локальных систем координат должен обеспечивать выполнение этих задач. При использовании метода Денавита и Хартенберга оси координат располагаются по следующим правилам:
1. Для звена i ось zi направляется по оси кинематической пары, образуемой им со звеном (i+1). Начало координат размещают в геометрическом центре этой пары.
2. Ось xi направляется по общему перпендикуляру к осям zi-1и zi с направлением от zi-1к zi. Если оси zi-1и zi совпадают, то xi перпендикулярна к ним и направлена произвольно. Если они пересекаются в центре кинематической пары, то начало координат располагается в точке пересечения, а ось xi направляется по правилу векторного произведения ![]() (кратчайший поворот оси zi до совмещения с zi-1при наблюдении с конца xi должен происходить против часовой стрелки).
(кратчайший поворот оси zi до совмещения с zi-1при наблюдении с конца xi должен происходить против часовой стрелки).
3. Ось yi направляется так, чтобы система координат была правой.
В прямой задаче необходимо определить положение схвата манипулятора и связанной с ним системы координат Mxnynzn по отношению к неподвижной или базовой системе координат Kx0y0z0. Это осуществляется последовательными переходами из системы координат звена i в систему координат звена i-1. Согласно принятому методу, каждый переход включает в себя последовательность четырех движений: двух поворотов и двух параллельных переносов, осуществляемых в указанной последовательности (рис. 3):
· поворот i-ой системы вокруг оси xi на угол -qi до параллельности осей zi и zi-1 (положительное направление поворота при наблюдении с конца вектора xi против часовой стрелки);
· перенос вдоль оси xi на величину -ai до совмещения начала системы координат Oi с точкой пересечения осей xi и zi-1 (отсчет по оси xi от точки пересечения оси xi и оси zi-1);
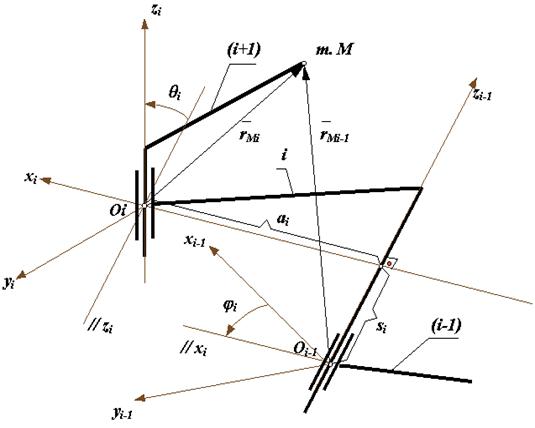
Рисунок 3. Схема манипулятора перехода из звена i в i-1.
· перенос вдоль оси zi-1 на величину -si, после которого начало системы координат Oi оказывается в начале координат Oi-1 системы (i-1) (отсчитывается по оси zi-1 от ее начала координат Oi-1 до точки ее пересечения с осью xi);
· поворот вокруг оси zi-1 на угол -ji, до тех пор пока ось xi не станет параллельной оси xi-1 (положительное направление поворота при наблюдении с конца вектора zi-1 против часовой стрелки).
Необходимо отметить, что знак угла поворота не имеет значения, так как в матрицах перехода используются направляющие косинусы (четные функции). Целесообразно рассматривать угол, обеспечивающий кратчайший поворот оси старой системы i до совмещения (параллельности) с соответствующей осью новой (i-1). Перемещения начала координат определяются как координаты начала старой системы Oi в новой Oi-1.
В манипуляторах обычно используются одноподвижные кинематические пары или вращательные, или поступательные. Оба относительных движения как вращательное, так и поступательное, реализуются в цилиндрических парах. Поэтому при общем представлении механизма используются (рис. 3) цилиндрические пары.
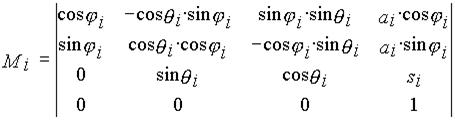
Матрицы перехода их системы Oi в систему Oi-1 можно записать так:
![]()
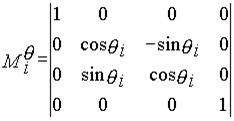
где:
- матрица поворота вокруг
оси xi на угол -qi,
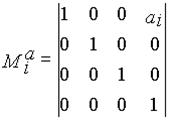
-матрица переноса вдоль оси xi на -ai,
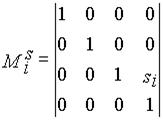
-матрица переноса вдоль оси zi-1на -si,
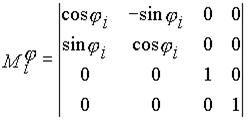
- матрица поворота вокруг оси zi-1 на уг угол -ji.
В этих матрицах переменные si и ji соответствуют относительным перемещениям звеньев в кинематических парах и являются обобщенными координатами манипулятора, определяющими конфигурацию механизма в рассматриваемом положении. Переменные ai и qi определяются конструктивным исполнением звеньев манипулятора, в процессе движения они остаются неизменными.
Положение некоторой произвольной точки М в системе координат звена i определяется вектором rMi, а в системе координат звена (i-1) - вектором rMi-1. Эти радиусы связаны между собой через матрицу преобразования координат Мi следующим уравнением:
![]()
 где:
где:
Mi - матрица перехода из i-ой системы координат в (i - 1)-ю.
Точность манипуляторов ПР
Точность манипуляторов определяется погрешностями позиционирования характеристической точки захвата (точка М) и погрешностями угловой ориентации захвата. Погрешности позиционирования определяются технологическими отклонениями размеров звеньев манипулятора, зазорами в кинематических парах манипулятора и механизмов приводов, деформациями (упругими и температурными) звеньев, а также погрешностями системы управления и датчиков обратной связи. В паспортных данных манипуляторов указывается максимально допустимое отклонение центра захвата манипулятора точки М от ее номинального расположения на множестве возможных конфигураций механизма. В результате погрешностей точка М описывает в пространстве некоторый эллипсоид, который называется эллипсоидом отклонений (рис. 4).
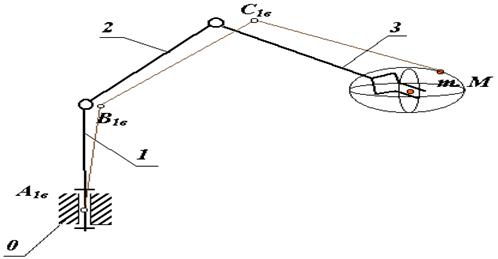
Рисунок 4. Схема манипулятора в пространстве.
Похожие работы
... автоматизации приводит лишь к их дискредитации. На развитие роботизации как нового научно-технического направления несомненно повлияло и то обстоятельство, что первоначально созданием промышленных роботов стали заниматься специалисты по вычислительной технике, технической кибернетике и т. д., которые ранее производственными вопросами автоматизации не занимались и вполне искренне верили, что ...
... и соединение с Сетью, а также (что приятно) первый запас напитков. Еще японские роботы воссоздадут парк Юрского периода в Дубае (ОАЭ). Достижения современной аниматроники и робототехники позволили учёным и инженерам приступить к реализации грандиозного проекта по возведению в одном из районов Дубая большого тематического парка динозавров "Беспокойная планета". Приятно, что большой парк ...


... медицинских задач». Похоже, разработчикам настоящих МИКРОРОБОТОВ на это действительно нечем ответить. Один из самых последних прототипов был создан несколько лет назад в швейцарском Институте робототехники и интеллектуальных систем. Он представляет собой крошечную металлическую спираль, которую можно разглядеть только под очень мощным микроскопом. Попав в переменное магнитное поле, она начинает ...
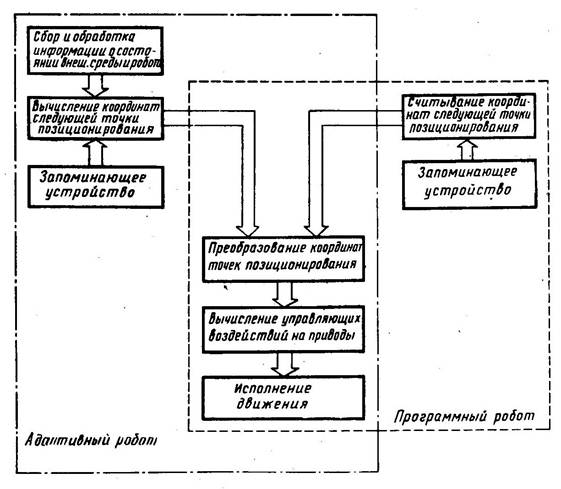
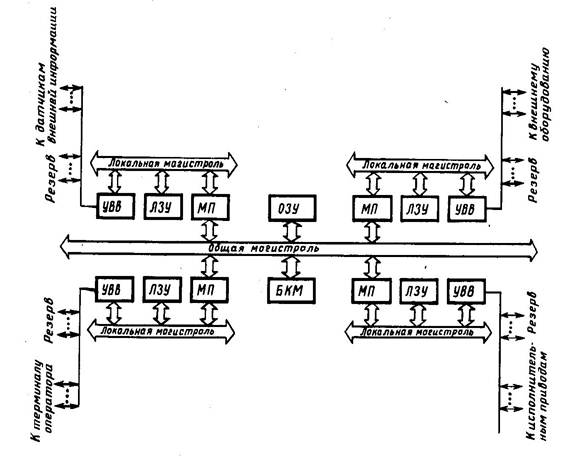

... отвечает за связь с внешним технологическим оборудованием и верхним уровнем управления автоматической линией или участком. Рис.2. Структура мультимикропроцессорного устройства адаптивного управления роботом. Особенностью данной структуры вычислительного устройства является возможность самодиагностики и саморемонта, которая реализуется с помощью блока контроля магистрали (БКМ). Функции ...
0 комментариев