Тема: "ОБЗОР СУЩЕСТВУЮЩИХ КОНСТРУКЦИЙ ИНДУКЦИОННО-ДИНАМИЧЕСКИХ МЕХАНИЗМОВ"
Привод электрического аппарата представляет собой систему взаимосвязанных устройств и механизмов, предназначенную для выполнения требуемых механических операций и их циклов, обеспечивающих работоспособность аппарата в условиях эксплуатации. В электрических аппаратах широко используются ручные, электромагнитные, электродвигательные, пружинные, пневматические и гидравлические (пневмогидравлические) приводы.

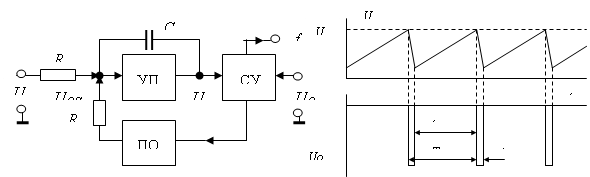
Рис. 1. Схематическое изображение привода.
Привод состоит из источника энергии ИЭ (рис. 1), пускового устройства управления УП, силового механизма СМ и накопителя энергии НЭ. В ручных приводах используется мускульная энергия оператора. В электромагнитных и электродвигательных приводах источником энергии является непосредственно электрическая сеть. B пружинных, пневматических и гидравлических приводах используется энергия, предварительно запасенная в аккумуляторах (соответственно в пружинных, пневматических и пневмогидравлических аккумуляторах). В качестве пусковых устройств применяются кнопки управления, тиристоры, электромагнитные пневматические (гидравлические) клапаны и т. п. В силовых механизмах, связанных с контактами, для передачи усилия используются твердые кинематические цепи, сжатый газ, жидкость высокого давления.
Накопитель энергии обеспечивает выполнение одной из операций. Так, в конструкциях электрических аппаратов пружинный приводной механизм часто применяется вместе с ручным, электромагнитным, пневматическим или гидравлическим приводным устройством, которое, совершая операцию отключения (или включения), взводит аккумулирующие пружины, а, следовательно, подготавливает аппарат для выполнения операции включения (или отключения).
Работа каждого элемента привода взаимосвязана с работой других элементов и устройств, а время срабатывания отдельных элементов в совокупности определяет время отключения (включения) аппарата.
Электромагнитными называют такие устройства, которые предназначены для создания магнитного поля в определенном объеме пространства с помощью обмотки, обтекаемой электрическим током.
Во многих электромагнитных устройствах магнитное поле используется для создания электромагнитных сил, вызывающих перемещение подвижных частей и совершающих механическую работу.
При этом подвижные части движутся по заданной траектории и преодолевают силы сопротивления, определяемые механической характеристикой. Такие электромагнитные устройства называют электромагнитными механизмами (ЭММ). ЭММ. используются в электроаппаратостроении в основном в качестве приводов. Электромагнитные механизмы, имеющие магнитную систему из ферромагнитных материалов, иногда называют электромагнитами (ЭМ).
Широкое использование ЭММ привело к появлению большого количества их разнообразных конструктивных исполнений и способов питания их обмоток. Все ЭММ можно отнести к двум группам: ЭММ с магнитной системой (МС) и без нее. Под МС (или, что то же, под магнитной цепью) будем понимать такую совокупность тел и сред, которая при наличии магнитодвижущей силы (МДС) создает ориентированный магнитный поток.
ЭММ с МС постоянного (рис. 2) и переменного (рис. 3) токов, а также поляризованные ЭММ (рис. 4) состоят из узлов, имеющих общее назначение. На этих рисунках обмотка 1 (иногда называемая обмоткой управления) закреплена на неподвижных частях магнитопровода 2. Магнитный поток, проходя по неподвижным и подвижным частям 3 (которые называют якорем), создает силу притяжения (отталкивания), вызывающую перемещение якоря и связанных с ним деталей. У ЭМ якорь может совершать вращательное (рис. 2, а—г, и, к и 3, а) или поступательное (рис. 2,д—з, л и 3, б—д) движения. МС типа (рис. 2,а—г и 3, а) называют клапанными; типа (рис. 2, е, ж и 3, б, в, д) — прямоходовыми; типа (рис. 2, д, з, ли 3, г) — с втягивающимся якорем.
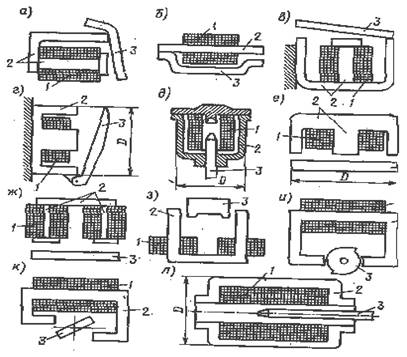
Рис. 2.Магнитные системы постоянных магнитов.
На рис. 4 у поляризованных ЭММ кроме обмоток управления имеется источник МДС 4, создающий поляризующий магнитный поток Фд Это может быть как специальная поляризующая обмотка, так и поляризующий постоянный магнит. Пока тока в обмотке управления 1 нет, на якорь действуют силы, определяемые поляризующим потоком в зазоре между якорем и неподвижными частями МС. МДС обмотки управления создает магнитный поток управления Фу (управляющий поток) .В зависимости от направления тока в обмотке управления управляющий поток в зазоре совпадает с поляризующим или противоположен ему по направлению. В соответствии с этим якорь испытывает повышенное или уменьшенное тяговое усилие в рассматриваемом зазоре
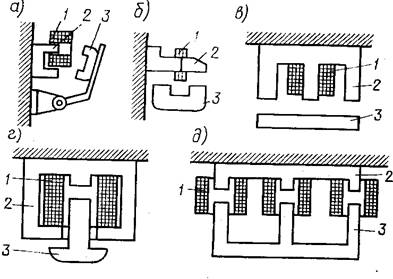
Рис. 3. Магнитные системы переменного тока.
Используя это явление, можно перебросить якорь поляризованных ЭММ в нужное положение. Так как после срабатывания у большинства поляризованных ЭММ, выполненных без преобладания положения якоря у одной из частей МС, якорь надежно удерживается поляризующим магнитным потоком, то для срабатывания таких ЭМ по обмоткам управления достаточно пропускать ток управления не длительно, а в течение малого времени, необходимого для перебрасывания якоря. Иными словами, поляризованные ЭМ допускают импульсное управление. Преобладание якоря можно обеспечить специальной настройкой ЭМ. Например, если установить упор 5 (см. рис. 4, д) так, чтобы он не позволял якорю при срабатывании переходить за ось симметрии, то при снятии управляющего сигнала якорь повернется против часовой стрелки в результате воздействия поляризующего потока Фпг.
Таким образом, обеспечивается преобладание положения якоря, а настройка такого ЭМ носит название однопозиционной. Двухпозиционная настройка ЭМ (рис. 4, е—з) обеспечивает якорю равные возможности его пребывания в одном из двух фиксированных положений. Кроме одно- и двухпозиционной настройки применяется еще настройка со средним (нейтральным) положением якоря, обеспечивающая при снятии тока управления возврат якоря (например, с помощью пружин) в среднее (нейтральное) положение.
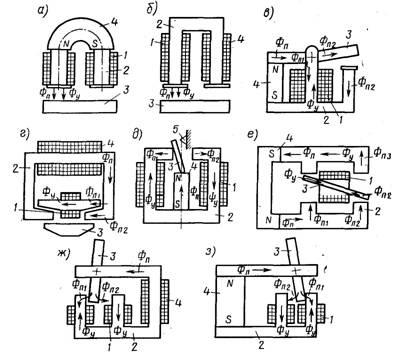
Рис. 4. Магнитные системы поляризованных магнитов.
Поляризованные ЭМ по исполнению МС можно подразделить на ЭМ с последовательной (рис. 4, а, б), параллельной (рис. 4, в—д, ж, з) и мостовой (рис. 4, е) магнитными цепями. Такое подразделение определяется путями для поляризующего магнитного потока.
Поляризованные ЭМ выгодно отличаются от других ЭММ повышенной чувствительностью к управляющему сигналу, относительно высоким КПД и быстродействием. Это объясняется тем, что у этих ЭМ в МС заранее запасена магнитная энергия (за счет источника МДС 4), а управляющему сигналу необходимо лишь ее перераспределить. Наиболее высокой чувствительностью отличаются ЭМ с мостовой магнитной цепью.
К группе ЭММ с МС можно отнести применяемые в электроаппаратостроении в качестве приводов электродинамические и индукционно-динамические механизмы.
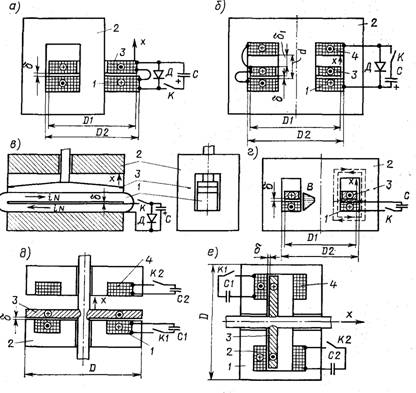
Рис. 5. Основные типы электродинамических и индукционно-динамических механизмов.
На рис. 5, а—в изображены электродинамические механизмы (ЭДМ), а на рис. 5, г—е—индукционно-динамические механизмы (ИДМ) с неподвижной МС. Эти ЭДМ и ИДМ по сравнению с ИДМ, имеющими подвижную МС, обладают менее высокими энергетическими характеристиками и КПД, однако они позволяют получать меньшие времена трогания и срабатывания. ЭДМ и ИДМ являются механизмами импульсного действия. Их обмотки питаются большим импульсным током. В результате этого достигается высокая плотность магнитной энергии в зазоре между проводниками с токами, что вызывает появление больших (до 200 кН и более) электродинамических усилий (ЭДУ), действующих на проводники.
Так как подвижные массы этих механизмов относительно невелики, то электродинамические силы вызывают значительные ускорения движущихся частей. Поэтому ЭДМ и ИДМ обладают высоким быстродействием. Отличие ЭДМ (рис. 5,и—в) от ИДМ (рис. 5,г—е) заключается в том, что в ЭДМ во всех токоведущих элементах ток определяется как переменным магнитным полем, так и сторонними источниками энергии, а в ИДМ в отдельных токоведущих элементах только переменным магнитным полем.
На рис. 5 источником энергии является конденсатор, предварительно заряженный до напряжения Uco.Заметим, что катушки 1, 3, 4 (рис. 5,й, б) могут подключаться каждая к своему отдельному источнику питания. При замыкании ключа К по катушкам начинает проходить ток. В варианте ЭДМ с двумя катушками (рис. 5,а) при указанном направлении токов наибольшая плотность магнитной энергии в зазоре между катушками и, следовательно, на катушки действует расталкивающая сила, вызывающая перемещение подвижной катушки 3 и связанных с ней деталей. Магнитопровод 2 для этого и других вариантов ЭДМ (и ИДМ) служит для увеличения магнитной проводимости путей потоков, текущих вне рабочих зазоров 6. Рабочий зазор при электродинамической силе, превышающей противодействующую механическую силу, определяемую механической характеристикой, увеличивается в направлении хода х подвижных частей 3. ЭДМ (рис. 5,6) содержит три катушки. При изображенном направлении тока между катушками 1 и 3 возникает сила отталкивания, а между катушками 3 и 4 — притягивания. Эффективность такого ЭДМ значительно выше, чем ЭДМ (рис. 5,а). Кроме того, этот ЭДМ имеет симметричную тяговую характеристику относительно плоскости, делящей зазор d пополам.
Тяговой характеристикой ЭММ называется зависимость электромагнитного усилия (ЭМС) F от значения зазора d при неизменном значении тока во всех токоведущих частях. Для ЭДМ на рис. 5 это может быть зависимость F(d) или F(d1). При определенных значениях зазора d, размерах катушек и МС ЭМС такого ЭДМ может оставаться практически постоянным при изменении зазора. В некоторых случаях практического использования ЭММ такой вид тяговой характеристики имеет первостепенное значение. Важным преимуществом рассматриваемого ЭДМ является возможность формирования тяговой характеристики нужного вида.
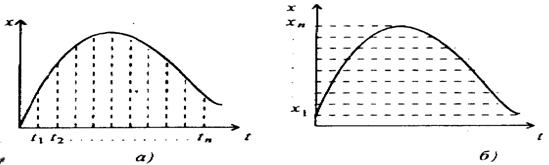
В последнее время в практику электроаппаратостроения вводится так называемое оптимальное управление движением подвижных деталей — контактов. При таком управлении для включения аппарата с малым временем подвижные контакты в начале пути разгоняются до больших скоростей и практически весь путь проходят с этой скоростью. Но непосредственно перед замыканием контактов скорость подвижного контакта снижают до допустимых значений. Это делается для того, чтобы не вызывать сильных ударов подвижных деталей о неподвижные, в том числе и контактов. В противном случае возможен наклеп, механический износ контактных поверхностей, вибрация контактов и другие нежелательные явления.
В ЭДМ (рис. 5,б) легко осуществить оптимальное управление. Соединив, например, катушки 1 и 3 последовательно, их подключают к одному конденсатору. В этом случае катушка 3 и связанные с ней детали получают большие скорости уже при малых значениях зазора d и в дальнейшем движутся под действием ЭДУ. При малом зазоре d1 к катушке 4 подключают второй предварительно заряженный конденсатор так, чтобы вызвать мягкое торможение катушки 3 и осуществить процесс включения контактов с малой скоростью.
В ЭДМ (рис. 5,а, б) форма и размеры катушек при срабатывании не изменяются. В отличие от этих ЭДМ в механизме (рис. 5,в) используется мягкая катушка 1 изменяющая форму в процессе срабатывания. Такая катушка (см. рис. 8, в) изготавливается из тонкой гибкой медной или алюминиевой ленты и содержит N витков. Между витками прокладывается также мягкая изолирующая лента. При прохождении по виткам тока разряда конденсатора на ее противоположные стороны действуют большие ЭДУ отталкивания. Под их действием верхняя часть катушки приходит в движение. Совместно с катушкой движется планка 3 (см. рис. 5,в), перемещающая подвижные детали.
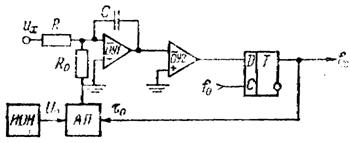
В рассмотренных ЭДМ направление действия ЭДУ зависит от согласного или встречного включения катушек. Если при принятом включении катушек одновременно изменять направление тока во всех токоведущих частях, то направление ЭДУ не изменяется. Поэтому, если емкость С конденсатора и индуктивность подключаемых к нему цепей таковы, что разряд конденсатора колебательный, то это не повлияет на нормальную работу ЭДМ. Однако при переходе тока через нулевое значение ЭДУ уменьшается также до нуля и затем вновь возрастает. Следовательно, в эти моменты на подвижные части усилие не действует. Чтобы повысить КПД и обеспечить более равномерное движение, катушки ЭДМ шунтируют диодами Д (см. рис. 5,а—в). Как только напряжение на катушке изменяет знак, диод открывается и образуется замкнутый контур, состоящий из катушки и диода. На рис. 6, а приведена электрическая схема замещения ЭДМ, а на рис. 6,б—д соответственно: б — ток ik в катушке и напряжение uс на конденсаторе при заторможенной катушке без шунтирующего диода; в — то же, с шунтирующим диодом (ток через диод — iд); г — ход катушки х, ток ik, напряжение uс (без диода); д — то же, но с диодом.
У всех электродинамических механизмов подвижные токоведущие элементы связаны с источником питания, который при срабатывании ЭДМ остается неподвижным. Поэтому износостойкость таких механизмов в первую очередь зависит от механических свойств гибких связей, подводящих ток к подвижным катушкам, а для ЭДМ с изменяемой формой — от механических свойств металлической и изоляционной лент. Поэтому число рабочих циклов ЭДМ ограничено. Этого недостатка не имеют индукционно-динамические механизмы.
Принцип работы этих механизмов поясним на схеме ИДМ (см. рис. 5,г). ИДМ состоит из катушки 1, называемой индуктором и закрепленной на замкнутом магнитопроводе 2, и катушки 3, имеющей возможность перемещаться вдоль магнитопровода. С этой катушкой механически связаны те детали, которые ИДМ должен перемещать.
Катушка 3 замкнута накоротко. Обычно она представляет собой один массивный короткозамкнутый виток или сплошной диск из электропроводного материала (см. рис. 5, д—е; рис. 7; рис. 8,г—д). На рис. 5,д—е приведены два варианта исполнения ИДМ. Из-за разрывов магнитопровода по своим характеристикам они занимают промежуточное положение между ИДМ с магнитной системой и без нее (см. рис. 8, г—д). Эти ИДМ имеют дополнительную катушку 4 (рис. 5, д—е), используемую как тормозную для оптимального управления движением или как ускоряющую при обратном движении диска 3.
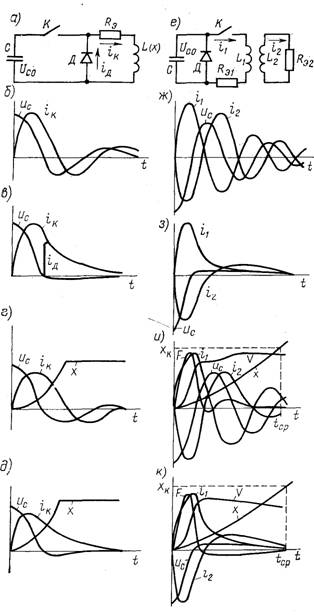
Рис. 6. Схемы включения и параметры ИДП.
При обратном движении катушка 1 обеспечивает торможение диска. Заметим, что в ИДМ на рис. 5,г также может быть установлена еще одна катушка, используемая для торможения диска или его ускорения при обратном движении.
При замыкании ключа К по индуктору 1 (рис. 5,г) проходит ток. Он создает магнитный поток, замыкающийся как по магнитопроводу 2, так и по рабочему зазору d. При указанном на рисунке направлении тока в катушке 1 поток направлен по ходу часовой стрелки. Этот поток пересекает площадь, охватываемую витком (катушкой) 3. В результате изменения потока, сцепленного с витком 3, в последнем индуцируется ЭДС, создающая ток, направленный противоположно току в катушке. Ток витка вызывает прохождение потока по магнитопроводу и рабочему зазору в направлении против хода часовой стрелки. Таким образом, потоки индуктора 1 и витка 3 в рабочем зазоре совпадают по направлению, а вне его противоположны и компенсируют друг друга. В результате этого плотность магнитной энергии в зазоре значительно превышает плотность магнитной энергии вне его, что и вызывает ЭДУ, стремящиеся отбросить виток 3 от катушки
Индукция в зазоре может в два-три раза превышать индукцию насыщения материала магнитопровода. Так как начальное значение зазора d обычно стремятся установить по возможности минимальным, то насыщенными оказываются лишь незначительные участки магнитопровода. Это видно из эпюры распределения индукции В вблизи зазора (рис. 5,г). Поэтому в расчетах обычно этими малыми участками пренебрегают и считают МС ненасыщенной. Это относится и к ЭДМ с МС. Ниже ИДМ и ЭДМ, имеющие магнитопроводы, отнесены к ЭММ с ненасыщенной МС. Если зазоры d соизмеримы с длинами магнитопроводов, то в расчетах следует учитывать их насыщение. В некоторых ЭДМ и ИДМ для обеспечения однополярного режима работы конденсатора он шунтируется диодом (см. рис. 5,а—в; рис. 7,а, в, г). Однако шунтирование конденсатора не всегда целесообразно, особенно в быстродействующих ИДМ без МС, так как могут создаться условия, когда токи в катушке и витке совпадают по направлению. В этом случае ЭДУ не ускоряют, а затормаживают подвижные детали. На рис. 6, е представлена электрическая схема замещения ИДМ, а на рис. 6, ж— к типичные осциллограммы, если: ж—диск не движется, диод Д— отсутствует; з — то же, но с диодом Д; и — диск движется, диод Д отсутствует; к —диск движется, диод Д установлен.
Особую группу ИДМ с МС составляют механизмы, имеющие подвижную МС (рис. 7). По эффективности преобразования электрической энергии в магнитную и в механическую работу эти ИДМ наиболее совершенны. Они могут быть выполнены с возвратно-поступательным движением якоря 3 и допускают оптимальное управление его движением. Недостатком этой группы ИДМ является меньшее быстродействие из-за достаточно больших подвижных масс по сравнению с ИДМ, рассмотренными выше.
При замыкании ключа К (рис. 7,а) индуктор 1 создает импульсное магнитное поле, которое индуцирует в короткозамкнутом витке 4 ток
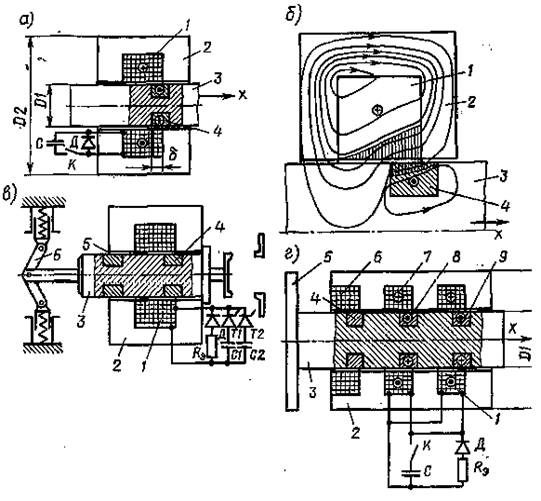
Рис. 7. Конструкция ИДП.
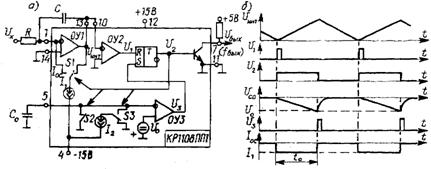
создающий свое магнитное поле, вытесняющее поле индуктора в зону рабочего зазора (на рис. 7,б эта зона заштрихована). В результате в зазоре значительно возрастает плотность магнитной энергии и возникающие ЭДУ выталкивают короткозамкнутый виток и якорь 3 в направлении х. На рис. 7, в изображен ИДМ с подвижной МС, на которой размещены ускоряющий 4 и тормозной 5 витки, и оптимальным управлением. При разряде конденсатора С1 якорь 3 перемещается вправо. При смене знака напряжения на выводах конденсатора в работу включается шунтирующая цепочка Rэ — Д. Сопротивление резистора Rэ подбирается таким, чтобы к моменту подхода короткозамкнутого витка 5 к индуктору 1 ток в индукторе затух до значения, которое необходимо для затормаживания якоря 3 перед замыканием контактов. Контакты замыкаются с малой скоростью, что исключает их вибрацию и уменьшает механический износ. При торможении якоря кинетическая энергия преобразуется в электромагнитную. Регулируя сопротивление резистора, легко получить различные режимы движения якоря. При Rэ ®µ, затормаживания может и не быть, а при Rэ = О якорь может полностью затормозиться и начать движение в обратную сторону. Конденсатор С2 и тиристор Т2 являются коммутирующими. С их помощью легко запереть силовой тиристор Т1 и тем самым в нужный момент прекратить подачу энергии от конденсатора С1 к ИДМ. Таким способом достигается регулирование динамических характеристик ИДМ. В замкнутом и разомкнутом положениях контакты удерживаются запорным механизмом 6. При отключении короткозамкнутый виток 5— ускоряющий, а короткозамкнутый виток 4. — тормозящий.
На рис. 7,г представлен привод с электромагнитным удержанием подвижной МС 3. Катушки 1 и 7 в ИДМ соединены согласно-параллельно; однако они могут соединяться и встречно-параллельно или последовательно, или принадлежать различным электрическим цепям. При изображенном на рис. 7г соединении катушек и положении якоря 5 витки 8 и 9 — ускоряющие. Сопротивление резистора Rэ таково, что к окончанию хода якоря ток в катушках 1 и 7 снижается до значения, необходимого для затормаживания. В витке 8 ток затухнуть также не успевает. Кроме того, при движении в нем и в витке 4 дополнительно наводятся токи из-за того, что эти витки входят в зону магнитных потоков, создаваемых соответственно катушками 1 и 7. В результате в конце хода якоря происходит снижение его скорости. Удержание якоря осуществляется с помощью электромагнита постоянного тока с обмоткой 6. Удерживающий поток замыкается вокруг нее по магнитопроводу 2, фланцу 5 и якорю 3.
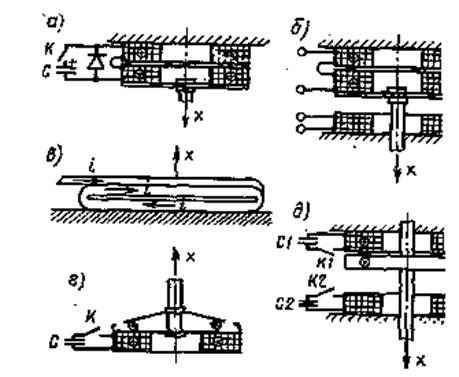
Рис. 8. Электродинамические и индукционно-динамические механизмы без МС
ЭММ без МС являются наиболее быстродействующими и простыми в изготовлении из всех рассмотренных. Эти ЭММ позволяют получить времена срабатывания, измеряемые единицами и долями миллисекунд, однако они имеют меньший КПД, чем ЭММ с МС. Электродинамические (рис. 8,а—в) и индукционно-динамические (рис. 8,г—д) механизмы без МС по принципу действия не отличаются от ЭДМ и ИДМ с МС. Они также могут обеспечивать оптимальное движение подвижных частей. Схемы питания этих ЭММ строятся с использованием тех же принципов, что и схемы питания ЭММ с МС (рис. 8). В схеме на рис. 9,а конденсатор разряжается одновременно на оба индуктора 1 и 3, имеющих собственную индуктивность L1 и L3. Пока диск 2, имеющий индуктивность L2, находится вблизи индуктора 1, взаимная индуктивность М12 намного больше взаимной индуктивности М23. В результате эквивалентная индуктивность L12э= L1— (M12)2/L2 измеренная на выводах катушки 1, намного меньше эквивалентной индуктивности L32э=L3—(М23)2/L2, измеренной на выводах катушки 3. Поэтому основная доля колебательного тока разряда конденсатора проходит по индуктору 1, вызывая перемещение диска 2. По мере приближения диска к индуктору 3 происходит перераспределение тока и основная доля тока начинает проходить по катушке 3, осуществляя торможение диска. В схеме (рис. 9,б) подключение тормозного индуктора 3 производится дополнительным ключом К2 в нужный момент времени, что приводит к переходу тока из индуктора 1 в индуктор 3.
Схема (рис. 9,в) иллюстрирует возможность последовательного соединения ускоряющего 1 и тормозного 3 индукторов. Из-за того что модуль производной взаимной индуктивности по перемещению
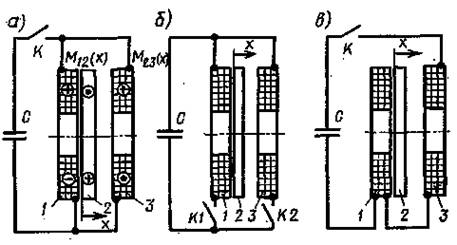
Рис. 9.Схемы ИДП без магнитной системы.
![]() между индуктором 1 и диском 2 намного больше модуля производной
между индуктором 1 и диском 2 намного больше модуля производной ![]() , ускоряющее ЭДУ
, ускоряющее ЭДУ ![]() больше тормозящего
больше тормозящего ![]() . По мере приближения диска к индуктору 3 возрастает значение
. По мере приближения диска к индуктору 3 возрастает значение ![]() и уменьшается значение
и уменьшается значение ![]() . Соответственно преобладающим становится тормозящее ЭДУ, что и вызывает уменьшение скорости диска.
. Соответственно преобладающим становится тормозящее ЭДУ, что и вызывает уменьшение скорости диска.
Одним из наиболее распространенных типов ИДМ является ИДМ с диском. Основное их достоинство в том, что подвижный элемент 2 (диск) не связан с катушкой-индуктором 1 (рис. 10). В связи с этим механическая износостойкость индукционно-динамических механизмов (ИДМ) может быть весьма высокой. Источником энергии ИДМ служит, как правило, емкостный накопитель энергии (ЕНЭ).
В быстродействующих электрических аппаратах ИДМ может воздействовать как на пусковые устройства, так и непосредственно на силовые контакты.
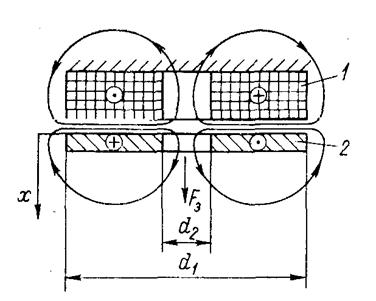
Рис. 10. Индукционно-динамический механизм
Например, на рис. 11 подвижная система состоит из диска 5, скобы 6 и уравновешивающего груза 8. Подвижная система в исходном положении удерживается пружиной 4, прижимающей диск 5 к изоляционной прокладке 7, закрывающей катушку-индуктор Катушка установлена в стенке 2 выключателя. При срабатывании ИДМ диск проходит путь х и сбивает защелку 3, удерживающую пружину включения во взведенном положении.
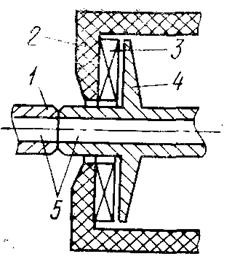
В высоковольтных аппаратах ИДМ может приводить в движение силовые контакты (рис. 12). Катушка-индуктор 3 закреплена в корпусе 2. При разряде на нее ЕНЭ фланец 4 подвижного контакта отталкивается от катушки и подвижный контакт отходит от неподвижного Так как контакты находятся в среде сжатого газа, то сразу же при размыкании контактов через их полости 5 начинается дутье, способствующее гашению дуги.
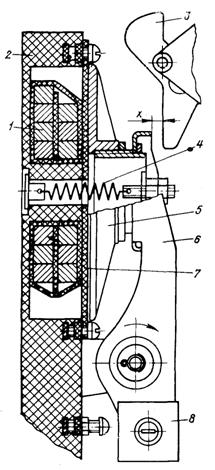
Рис. 11. ИДМ в низковольтных быстродействующих выключателях
ВЫВОДЫ
В данном реферате были рассмотрены различные варианты конструкций электромагнитных (ЭММ), электродинамических (ЭДМ) и индукционно-динамических механизмов (ИДМ), которые используются в качестве приводов электрических аппаратов. К таким вариантам относятся конструкции с магнитной (МС) постоянного, переменного тока, а также поляризованные ЭММ. Также были рассмотрены ЭММ без МС, которые обладают более высоким быстродействием по сравнению с ЭММ с МС. Рассмотрены конструкции ЭММ с вращательным, поступательным движением якоря, а также с несколькими типами МС: клапанного, прямоходового и с втягивающимся якорем (как подвижные, так и неподвижные).
Достоинством поляризованных ЭММ является относительно высокое КПД и быстродействие. Также данные ЭММ допускают импульсное управление, что позволяет пропускать ток управления не длительно, а в течении малого промежутка времени.
Основной акцент был сделан на ЭММ без МС, к которым относятся широко применяемые в электроаппаратостроении элекродинамические и индукционно-динамические механизмы ЭДМ и ИДМ, являются механизмами импульсного действия. ЭММ без МС являются наиболее быстродействующими и простыми в изготовлении из всех рассмотренных. Эти ЭММ позволяют получить времена срабатывания, измеряемые единицами и долями миллисекунд и получили наиболее широкое распространение, несмотря на более низкий КПД, чем ЭММ с МС.
В быстродействующих электрических аппаратах ИДМ может воздействовать как на механизм, так и непосредственно на силовые контакты.
Рассмотрены так же электрические схемы подключения катушки ИДМ к накопителю энергии.
Проведенный обзор позволяет сделать следующие выводы:
· Наиболее эффективными являются конструкции приводов с накопителем энергии;
· Несмотря на более низкий КПД, более быстродействующими являются приводы без магнитной системы;
· Среди приводов без магнитной системы наиболее надежными являются индукционно-динамические приводы;
· С точки зрения наименьшего времени срабатывания, наиболее эффективными являются ИДМ, воздействующие непосредственно на силовые контакты выключателя;
· Наибольшие электромагнитные усилия обеспечивает электрическая схема, использующая колебательный разряд емкостного накопителя энергии.
СПИСОК ИСТОЧНИКОВ ЛИТЕРАТУРЫ
1. Оптимизация динамический-динамического-индукционно-динамического розчеплювача с целью повышение струмообмежуючої способности быстродействующих автоматических выключателей: Автореф. дис... канд. техн. наук : 05.09.01 / О.Г. Среда / Нац. техн. ун-т "Харк. політехн. ін-т". - Х., 2002. - 18 с. - укp.
2. Влияние криогенного охлаждения на параметры линейного индукционного двигателя ударного действия: Автореф. дис... канд. техн. наук: 05.09.01 / Ель-Юссеф Ібрагім Мослех / Харьковский держ. политехнический ун-т. - Х., 1999. - 19 с. - укp.
3. Энергоэффективные схемы питания индукторов для электромагнитного воздействия на металлические расплавы / Сарапулов Ф.Н., Сарапулов С.Ф., Федонов С.В. Труды Международной НТК 12-е Бенардосовские чтения, 01.06.05-03.06.05, Иваново. С. 15.
4. Исследование электромагнитных и тепловых процессов индукционного МГД-насоса / Сарапулов Ф.Н., Сарапулов С.Ф., Сокунов Б.А. Труды международной НТК KORUS-05, 26.06.05-02.07.05, Новосибирск. С.
5. Формирование режимов работы линейного индукционного магнитогидродинамического насоса / Ф.Н. Сарапулов, С.Ф. Сарапулов, Б.А. Сокунов. Там же. С. 121-124.
Похожие работы
... измерения энергии должна находится в пределах ±(0,1-2,5)%. 4.4 Зависимость погрешности дозирования от состава технических средств комплексов дозирования Поскольку в электротехнические комплексы дозирования помимо рассмотренных выше устройств цифрового дозирования количества электричества и электрической энергии входят также устройства коммутации и датчики тока и напряжения, то необходимо ...
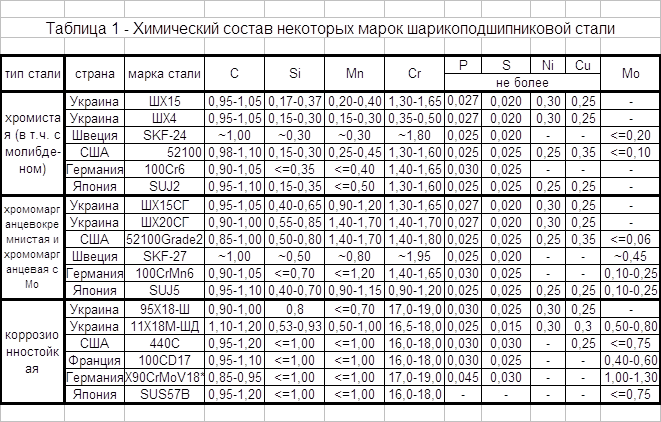
... подшипников, срок службы которых будет измеряться не десятками лет, а столетиями. 4. Выбор и рекомендации по использованию новых прогрессивных разработок в технологии выплавки шарикоподшипниковых сталей. Постоянно растущие требования к качеству стали могут сыть удовлетворены лишь при производстве металла с низкими содержаниями серы, кислорода, водорода и неметаллических включений. Но ...
... или технологических процессов; – при выборе технического решения обеспечить малоотходность производства и максимальную эффективность использования энергоресурсов. Задачи специалиста в области безопасности жизнедеятельности сводятся к следующему; – контроль и поддержание допустимых условий (параметры микроклимата, освещение и др.) жизнедеятельности человека в техносфере; – идентификация ...
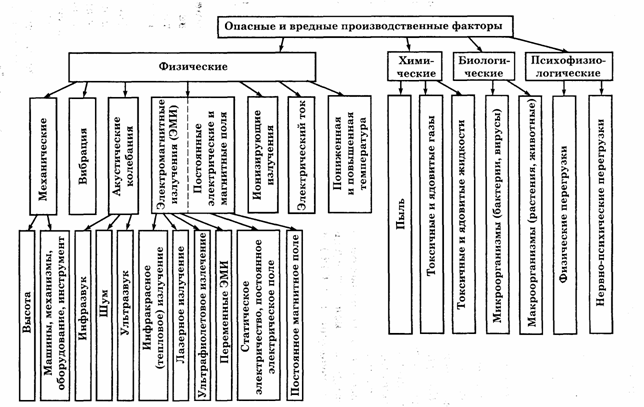

... : трудового и коллективного; —правила внутреннего трудового распорядка организации, ответственность за нарушение этих правил; —организацию работы по управлению охраной труда; —контроль и надзор за соблюдением требований охраны труда в организации; —основные опасные и вредные производственные факторы, характерные для данного производства; —СИЗ, порядок и нормы выдачи их и сроки носки; — ...
0 комментариев