Кафедра «Технология машиностроения»
Расчетно-графическая работа по ТАУ
«САУ стабилизации уровня вибраций»
Тольятти 2006
Содержание
1. Функциональная схема системы
2. Порядок работы системы
3. Структурная схема контура
4. Анализ устойчивости контура
5. Переходный процесс
6. Определение оптимальных частот работы контура
Список используемой литературы
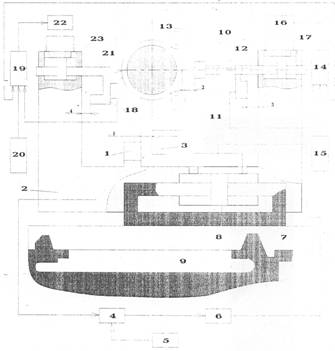
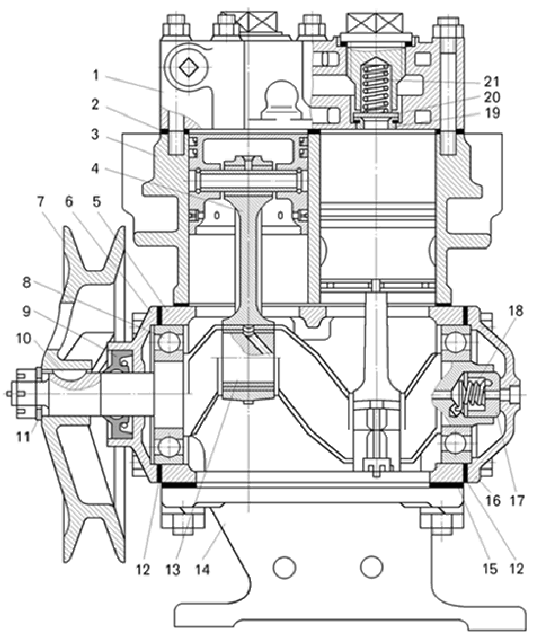
1. Функциональная схема системы
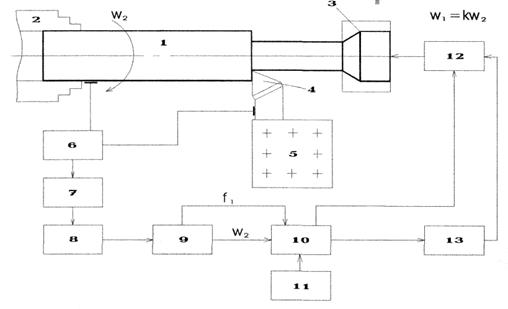
Рис. 1
1 – деталь
2 – патрон передней бабки
3 – механизм зажима задней бабки
4 – резец
5 – резцедержатель
6 – устройство измерения теромо-ЭДС
7 – блок выделения переменной составляющей теромо-ЭДС
8 – усилитель
9 – фильтр выделения частоты автоколебаний f1
10 – блок управления
11 – задающее устройство
12 – механизм натяжения детали
13 – механизм импульсного изменения управляемой растягивающей силы
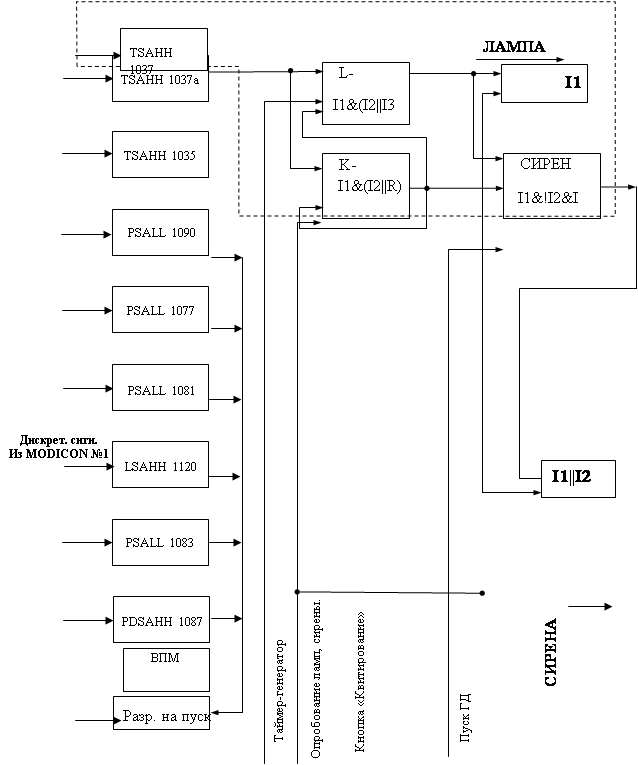
2. Порядок работы системы
На чертеже представлена структурная схема системы автоматического управления, посредством которой реализуется способ поднастройки системы СПИД.
Предварительно деталь 1 устанавливается в патроне 2 передней бабки и зажимает ее. Второй конец детали 1, обращенный к задней бабке, зажимают в механизме 3 зажима. К детали 1 подводят резец 4 и настраивает его на требуемый размер. Включают привод главного движения станка, приводят во вращение деталь 1 и осуществляют резание, затем начинают обработку. Одновременно с блока 10 управления подают сигнал на механизм 12 натяжения детали 1 и предварительно нагружают ее начальной растягивающей силой для увеличение жесткости системы СПИД. В процессе обработки устройством 6 измеряют термо-ЭДС естественной термопары резец-деталь и с помощью блока 7 выделяют переменную составляющую термо-ЭДС, несущую информацию о вынужденных колебаниях системы деталь-резец. Так как глубина резания из-за малой жесткости детали является величиной переменной по диаметру детали и ее длине, то термо-ЭДС пропорциональна глубине резания, т.е. частота и амплитуда переменной составляющей термо-ЭДС пропорциональна частоте вращения детали и амплитуде относительных колебаний деталь-резец в зоне резания. Сигнал, пропорциональный переменной составляющей термо-ЭДС, усиливают в усилителе 8 и подают на фильтр 9, где выделяют сигналы f1 и ω2, соответственно пропорциональные автоколебаниям и вынужденным колебаниям, и подают их на блок 10 управления. С задающего устройства в зависимости от размеров обрабатываемой детали и режимов обработки вводится коэффициент кратности вынужденных колебаний (имеющий четные значения 2, 4, 6… n). Сигнал с блока 10 управления поступает на механизм 13 импульсного изменения управляемой растягивающей силы, который воздействует с частотой ω1= kω2, кратной частоте вращения детали, на зажатый в механизме 3 конец детали. Импульсы управляемой растягивающей силы прикладывают в момент прохождения максимальной амплитуды биения детали через вершину резца и при повороте ее на угол, пропорциональный коэффициенту кратности частоты вынужденных колебаний детали, при этом вносят корректирующую поправку в относительное положение резца и детали при резании.
Способ опробован на станке 1А 616 со встроенной автоматически управляемой задней бабкой. В пиноль каждой встраивается гидравлический сервопривод, управляемый от электронного блока управления с учетом заданного воздействия. Обрабатываемая деталь имеет следующие параметры: длина 450 мм., диаметр 20 мм. Оба конца детали зажимаются специальными патронами с учетом действия на них сил растяжения. Режимы резания: скорость резания 15–19 м/мин., глубина резания 0,25–0,75 мм., подача 0,054–0,11. Начальный эксцентриситет заготовки 0,320–3,350 мм. Геометрия инструмента φ=45°, γ=5°, α=5°, твердосплавная пластинка Т15К6. Начальное осевое усилие растяжения 50 кг.
Точность обработки повышается в 4–4,75 раза в зависимости от режимов резания, геометрических размеров заготовки и точки зоны обработки. Точность обработки в центре заготовки повышается максимально в 3,5–4 раза. С увеличением отношения длины заготовки к диаметру точность повышается.
При растяжении собственная частота детали растет на 10–20%, т.е. происходит смещение спектра частот в сторону их возрастания и одновременно уменьшаются амплитуды колебаний по соответствующим формам. Последнее позволяет повысить виброустойчивость системы СПИД в 2–2,35 раза, что приводит к увеличению производительности на 40–45%.
Импульсное приложение растягивающей силы приводит к уменьшению величины силы растяжения в 6–8 раз, уменьшению мощности механизма растяжения на 60%. Кратность частот импульсов растягивающей силы частоте вращения детали позволяет получить резонансный режим работы.
Указанный способ поднастройки системы СПИД обеспечивает повышение точности поднастройки и обработки, расширяет технологические возможности, уменьшает величину силы растяжения при том же эффекте, корректирующее воздействие осуществляют на упругую систему СПИД, что упрощает процесс поднастройки.
3. Структурная схема контура
На рис. 2 показана структурная схема первого контура САУ стабилизации уровня вибрации.
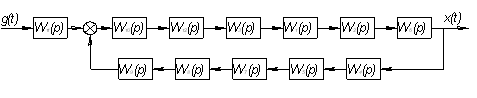
Рис. 2.
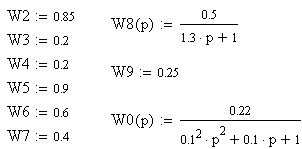
Передаточные функции звеньев контура:
W1(p)=0,3
W2(p)=0,25
W3(p)=0,5
W4(p)=0,1
W5(p)=0,3
W6(p)=0,65/(0,1p+1)
W7(p)=0,6
W8(p)=0,8
W9(p)=0,22/(0,6p+1)
W10(p)=0,7
W11(p)=0,3
W12(p)=0,1
4. Анализ устойчивости контура
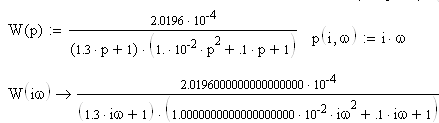
Передаточная функция разомкнутого первого контура:
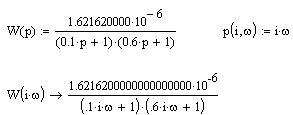
Выделяем вещественную и мнимую части:

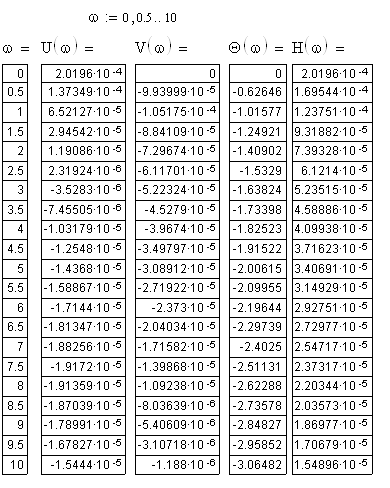
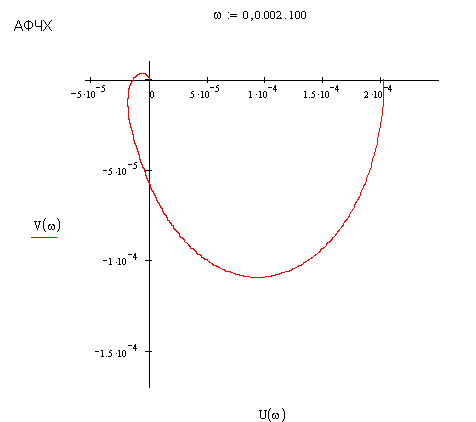
Исходя из полученных зависимостей, строим характеристики контура: АФЧХ, ФЧХ и АЧХ.
АЧХ: ![]()
ФЧХ: ![]()

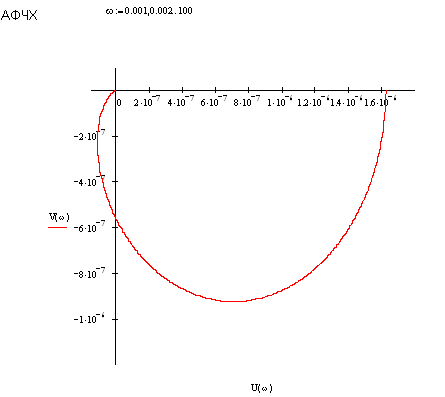
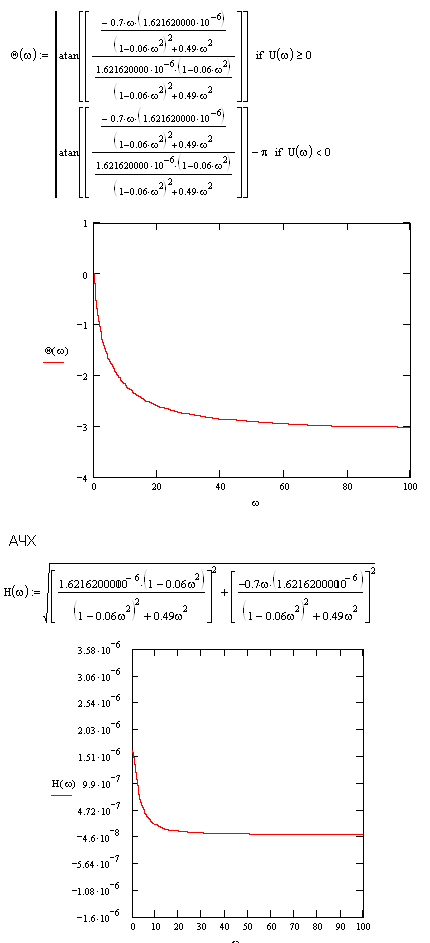
Анализируя АФЧХ, приходим к выводу, что по критерию устойчивости Найквиста первый контур данной САУ устойчив, т. к. годограф не пересекает отрезок вещественной оси (– ∞; -1).
5. Переходный процесс
Построим переходную характеристику контура:
U(ω)замкн=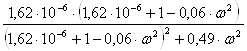
Построим график разности заданной и текущей функции А(t), учитывая, что
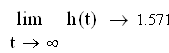
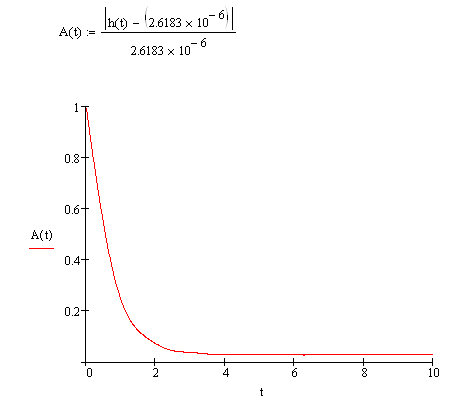
С помощью переходной характеристики и графика A(t) определяем время быстродействия звена. В данном случае оно равно времени, при котором h(t)=h(∞) + / – 5%.
Время быстродействия звена: tб = 2,3.
6. Определение оптимальных частот работы контура
Для этого необходимо построить АФЧХ для передаточной функции ошибки.
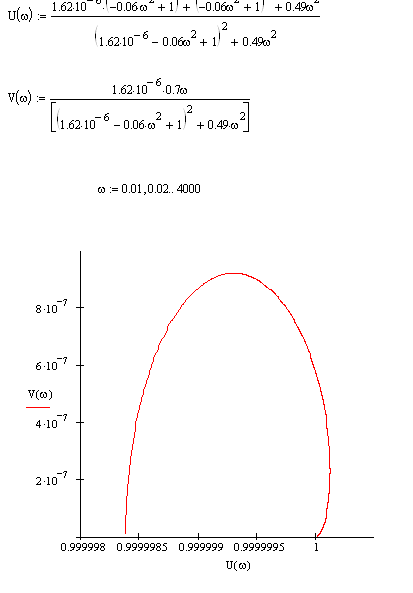
Анализируя АФЧХ функции ошибки, определяем, что оптимальной частотой работы контура ωопт.=0,1.
Похожие работы
... , в зависимости от режимов резания, производительность в 2—2,5 раза. 3. Структурная схема контура На рис. 2 показана структурная схема первого контура САУ стабилизации уровня вибрации. Рис. 2 Передаточные функции звеньев контура: 4. Анализ устойчивости контура Передаточная функция разомкнутого первого контура: Выделяем вещественную и мнимую части: Исходя из ...
... проведение погрузочно-разгрузочных работ и расширить возможности модульной комплектации ТС для транспортировки крупногабаритных грузов. Создание системы стабилизации ПКП является актуальной задачей. 2.1. Постановка задачи Требуется разработать систему автоматической стабилизации пневмоколесной платформы для перевозки крупногабаритных грузов. Система должна обеспечивать горизонтальное ...

... , преобразования их в цифровую форму, передачей их в ПК через параллельный порт и последующей обработки этих данных разработанной программной системой автоматического контроля технологических параметров. 9.2 Структура лабораторного стенда Лабораторный стенд основывается на интегральной микросхеме аналого-цифрового преобразователя 572ПВ4, которая представляет собой 8-ми канальную 8-ми ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...
0 комментариев