Содержание
Введение
Определение структуры и параметров объекта управления
Разработка алгоритма управления и расчёт параметров элементов структурной схемы
Разработка принципиальной схемы и выбор её элементов
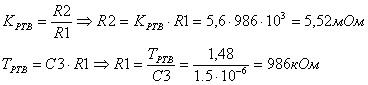
Расчёт параметров регулятора скорости
Принципиальная схема гибкой обратной связи
Заключение
Список литературы
Введение
Электропривода постоянного тока широко используются в промышленности. Их существенные преимущества заключаются в простоте управления, точности и непрерывности регулирования скорости в широком диапазоне, высоком быстродействии.
В регулируемом электроприводе наиболее приемлемым решением до сих пор является двигатель с тиристорным управлением. В последние годы дальнейшее развитие получили также приводы переменного тока. Однако при наличии высоких требований к показателям регулирования они не могут успешно конкурировать с электроприводами постоянного тока.
Несмотря на свою надёжность, малые габариты, неприхотливость в обслуживании, двигатели переменного тока требуют относительно сложных и дорогостоящих систем регулирования скорости.
Диапазон мощностей существующих тиристорных электроприводов постоянного тока имеет пределы от долей киловатта до нескольких тысяч киловатт.
Технологический прогресс в области электротехники, электроники, наблюдающийся в последние годы, привёл к существенным изменениям системах управления электроприводами.
Определение структуры и параметров объекта управления
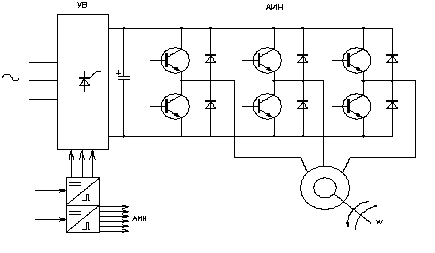
Объект управления данного электропривода содержит: электродвигатель ПБВ 132 L, тиристорный реверсивный преобразователь, М=6, с раздельным управлением комплектами, рабочий орган упруго связанный с валом электродвигателя.
Основные технические данные двигателя:
Номинальный момент, нм, 47,7
Номинальная частота вращения, об/мин 600
Номинальное напряжение, в, 70
Номинальный ток, А, 50
Длительный момент в заторможенном состоянии, нм, 62
Максимальный момент при пуске, нм, 470
Момент при максимальной частоте вращения, нм, 21
Максимальный момент при макс. частоте вращения, нм, 98
Момент инерции двигателя, кг*м2, 0,238
Сопротивление обмотки якоря, Ом, 0,0707
Индуктивность обмотки якоря, мГн, 0,554
Электромеханическая постоянная времени, мс, 12,3
Электромагнитная постоянная времени, мс, 7,85
Масса, кг, 100
Электродвигатель этой серии длительно выдерживают повышение частоты вращения 0.1…2000 об/мин. Класс нагревостойкости изоляции-F. Степень защиты от воздействий окружающей среды - IP44; способ охлаждения - IC040.
Рассчитаем недостающие параметры двигателя, необходимые в дальнейших расчётах.
 C
C![]()

Постоянная времени Тэ:
Тэ = L / R = 0.554/0,0707 = 7,85 мс
Расчёт параметров упругой двух массовой системы:
Согласно заданию на курсовой проект ![]() , Fу = 10 Гц.
, Fу = 10 Гц.
Частота упругих колебаний
![]() =2 * 3.14 * 10 = 62,8
=2 * 3.14 * 10 = 62,8
Коэффициент соотношения масс
Отсюда J2 = 0.476 кг / м
Найдём жесткость двух массовой системы
Постоянная времени двух массовой системы
Ту = 1/![]() = 15,9 мс
= 15,9 мс
Постоянная времени Тм:
Т м = (J1+J2) *R / C![]() = 0.001884*2*0.53/0.36
= 0.001884*2*0.53/0.36![]() = 0.055
= 0.055
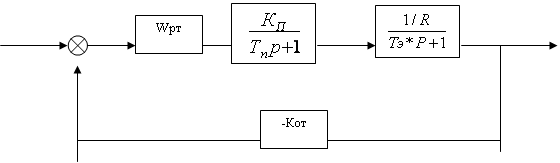
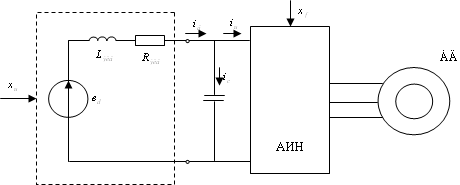
В качестве системы управления выбираем систему подчинённого регулирования координат с тремя контурами: контур тока, контур скорости первой массы, контур с гибкой обратной связью по скорости второй массы.
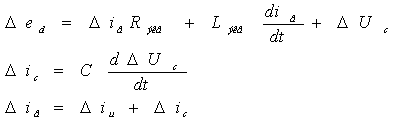
Так как из расчётов приведенных ранее видно что:
Тэ и Тм отличаются не очень значительно, то придётся использовать внутреннюю обратную связь по ЭДС двигателя.
Контур тока.
Контур тока будем настраивать на симметричный оптимум. В качестве малой не скомпенсированной постоянной времени принимаем постоянную времени двигателя тиристорного преобразователя.
Т![]() = Тп = 0.002 с.
= Тп = 0.002 с.
Исходя из того что по условию задания на курсовой проект в качестве преобразователя используется ТП, то примем постоянную времени Тп=0,002с, что соизмеримо с Тэ, тогда ТП представляем инерционным звеном с передаточной функцией
Структурная схема контура тока представлена на рис 1.
 Uзт I
Uзт I
Рис 1.
Коэффициент обратной связи по току:
Кот = Uзт мах / Iмах = 0.1
Коэффициент усиления преобразователя
Кп = Uп / Uзт = 70/10 = 7
При настройке на технический оптимум желаемая передаточная функция разомкнутого контура равна:
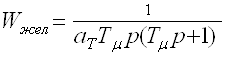 ;
;
где ![]() = 2
= 2
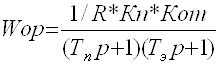
Передаточная функция разомкнутого контура
Передаточная функция регулятора тока

Получили ПИ - регулятор тока.
Постоянная времени полученного регулятора тока Трт = 7.1 мс
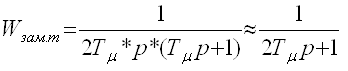
Передаточная функция замкнутого контура тока
Контур скорости
Имея ввиду то что Ту = 0.0158 с, а 4Т![]() = 4*0.002 = 0.008 с
= 4*0.002 = 0.008 с
Можно сказать что Ту>>4Т![]()
Следовательно при расчёте контура скорости можно пренебречь влиянием обратной связи по упругому моменту. Структурная схема контура скорости имеет вид: (рис 2).
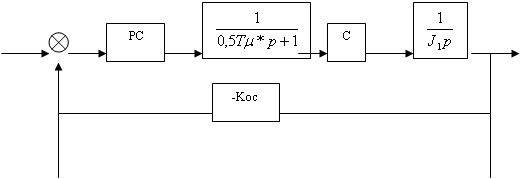 |
Рис 2.
Коэффициент обратной связи по скорости:
Кос =  =
= ![]() 0.159
0.159
Для стабилизации скорости применим ПИ-регулятор, который устранит статическую ошибку. Тогда желаемая передаточная функция разомкнутого контура скорости первой массы:
Передаточная функция разомкнутого контура скорости:
Тогда передаточная функция регулятора скорости первой массы будет:

Получили ПИ - регулятор скорости
Контур скорости второй массы
Для того чтобы уменьшить влияние упругой связи двух массовой системы на работу электропривода и демпфирования упругих колебаний введём гибкую обратную связь по скорости (ускорению) второй массы. Таким образом на регулятор скорости будет подаваться не только задание на скорость и сигнал обратной связи по скорости первой массы, но и сигнал гибкой обратной связи по скорости второй массы. Действие этой гибкой связи можно расценивать как искусственное увеличение ![]() .
.
Структурная схема контура представлена на рис 3:
|
|
|
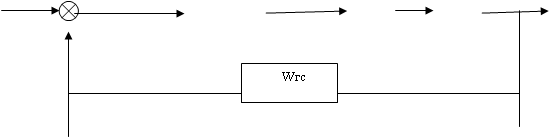
Рис 3
Передаточная функция гибкой обратной связи
Wгс = - То*Р
Для нормальной работы системы необходимо привести сигнал гибкой ОС к сигналу задания на скорость. Для этого в цепь гибкой ОС необходимо ввести коэффициент ОС по скорости первой массы.
Wгс = - То*Р*Кос
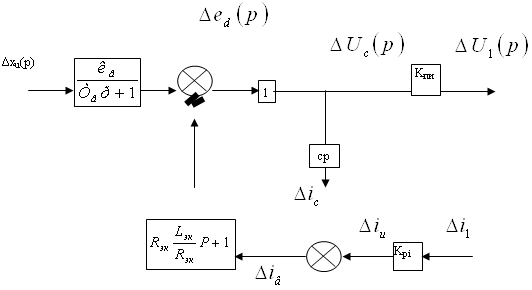
Для определения То надо задаться величиной о и подставить её в формулу:
![]()
Примем j = 5.8 Получим To = 0,235 Результаты моделирования.

Рис.4. Момент сопротивления
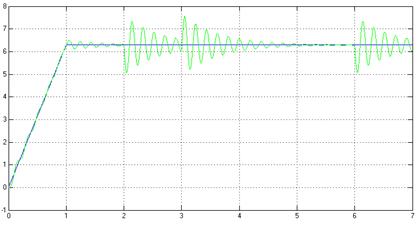
Рис.5. Скорость второй массы без гибкой обратной гибкой ОС.
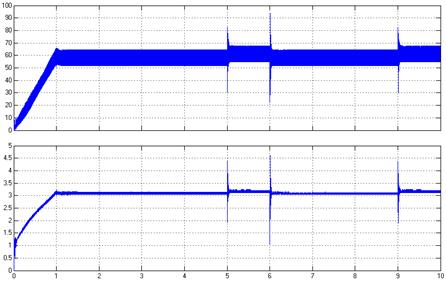
Рис.6. Напряжение с ТП и сигнал управления.
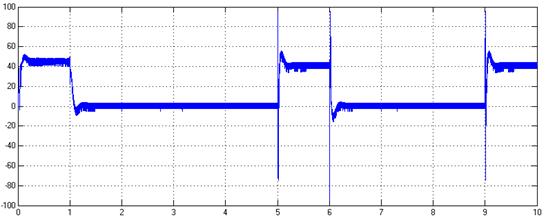
Рис.7. Зависимость тока от времени.
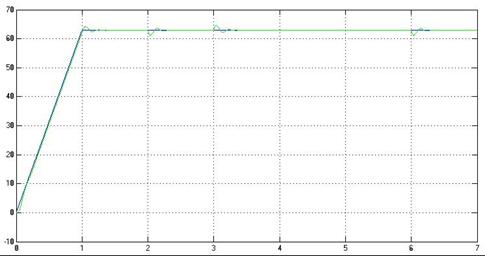
Рис.8. Скорость второй массы с гибкой ОС, задание 10в
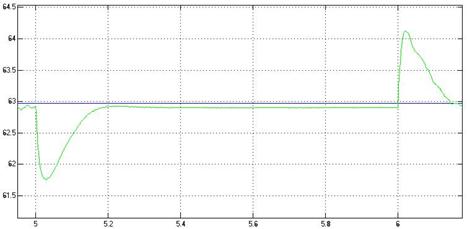
Рис.9. Скорость второй массы с гибкой ОС, задание 10в (увеличено)
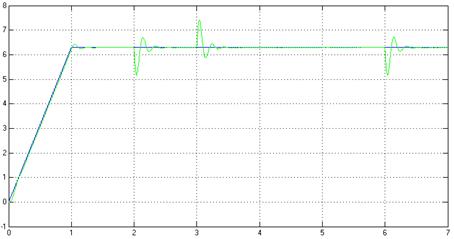
Рис.10. Скорость второй массы с гибкой ОС, задание 1в
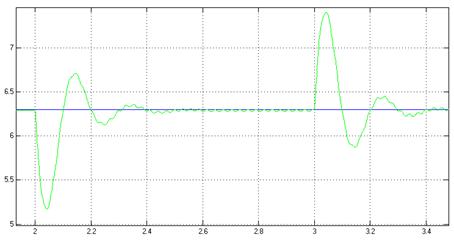
Рис.11. Скорость второй массы с гибкой ОС, задание 1в (увеличено)
Разработка принципиальной схемы и выбор её элементовРасчёт параметров регулятора тока.
Выбираем датчик тока ДТХ-150 имеющий параметры:
Номинальный входной ток Iвх ном = 0…125 А
Точность 1%
Диапазон преобразований А = 1,5*Iн
Выходной сигнал I вых = 75мА
Рабочая частота f = 0……50 кГц
Напряжение питания Uпит = 15 В
Рабочая температура Т = - 20…... +70
Принципиальная схема регулятора тока представлена на рис 12
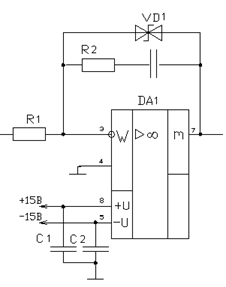
Рис. 12
![]() .
.
Выбираем: 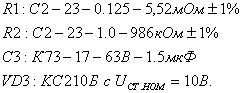
DA1 - операционный усилитель общего применения К140УД8А
Расчёт параметров регулятора скоростиДля создания обратной связи по скорости первой массы применим тахогенератор ТП50-100-1 с параметрами Uмах=150 В Þ в нашем случае примем, что на максимальной скорости тахогенератор вырабатывает 75 В. Jp=360*10-7 кгм2, Мтр=270*10-4 Нм.
Видно, что момент инерции ротора тахогенератора и дополнительный момент сопротивления настолько малы по сравнению с основными параметрами системы, что ими можно пренебречь.
![]()
Для согласования выходного напряжения тахогенератора с системой управления, применим делитель, представленный на рис.13
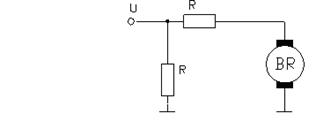
Рис. 13.
Примем R24=10 кОм Þ ![]()
Регулятор скорости имеет вид представленный на рис 14
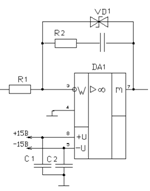
Рис. 14.
![]() .
.
Выбираем: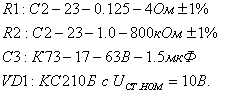
DA1 - операционный усилитель общего применения К140УД8А
Принципиальная схема гибкой обратной связиТак как гибкая связь представляет собой дефиринциатор то принципиальная схема как на рис 9. Сигнал обратной связи будем брать с датчика скорости типа DВ 3 A, который обеспечивает нужную погрешность.
С параметрами: Крутизна характеристики 20в/об, Макс. скорость вращения 4000об/мин.
Схема включения идентична со схемой включения датчика скорости первой массы.
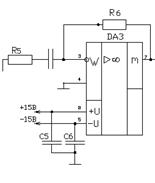
Рис.15.
Так как передаточная функция гибкой обратной связи
Wос = Тос *р = 0.238 *р
Тогда
Тос = С2*R6
Выберем С6 =0.01 мкФ
R6 = 23.8 kОм
Выберем R5 = R6 кОм.
В качестве DA3 примем быстродействующий операционный усилитель
К140УД11
R5,R6 - C2-33H c Rн = 24 кОм
C6 - К77Г с Сн = 0.01 мкФ.
Для реализации не инвертирующих сумматоров и инверторов, необходимо чтобы сопротивления в цепи были равны, как на примере сумматора. (рис. 16).
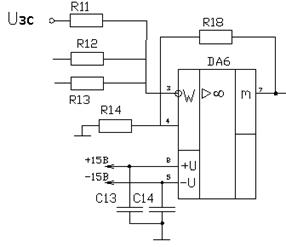
Рис.16.
Принимаем R11=R12=R13=10kОм
Заключение
В ходе выполнения курсового проекта по дисциплине "Системы управления электроприводом" были получены важные навыки разработки типовых алгоритмов управления промышленными механизмами, выбора структуры системы регулирования, расчета требуемых параметров устройств. Также была проведена работа с разнообразным справочным материалом с целью поиска элементов систем автоматики, необходимых для реализации синтезированной системы управления.
Разработана система управления, реализующая стабилизацию скорости в диапазоне от 0,1wн до wн. С ошибкой не более 2 процентов.
Список литературы
1. Справочник по электрическим машинам: В 2 т. / Под общ. Ред. И.П. Копылова и Б.К. Клокова. Т.1. - М.: Энегроатомиздат, 1988, - 456 с.
2. Заборщикова А.В., Мельников В.И. "Двигатели постоянного тока для автоматизированного электропривода": Учебное пособие. - СПб: Петербургский гос. ун-т путей сообщ., 1994. - 84 с.
3. Башарин А.В., Новиков В.А., Соколовский Г.Г. "Управление электроприводами": Учебное пособие для вузов. - Л.: Энергоатомиздат. Ленингр. Отд-ние, 1982. - 392 с., ил.
4. Ключев В.И. "Теория электропривода": Учеб. Для вузов. - 2-е изд. Перераб. И доп. - М.: Энегроатомиздат, 2001. - 704 с.: ил.
5. Герман-Галкин С.Г. И др. Цифровые электроприводы с транзисторными преобразователями. - Л.: Энергоатомиздат. Ленинградское отделение, 1986. -246 с.
6. Справочник разработчика и конструктора РЭА. Элементная база: В 2 кн. / Масленников М.Ю., Соболева Е. А и др. - М.: Б.И., 1996. - 157-300с.
7. Бурков А.Т. Электронная техника и преобразователи: Учеб. Для вузов ж. -д. трансп. - М.: Транспорт, 1999. - 464 с.
8. Александров К.К., Кузьмина Е.Г. Электротехнические чертежи и схемы. - М.: Энергоатомиздат, 1990. - 288с.
Похожие работы
... равное отношению угловой частоты ЭДС ротора Ω2 (приведенной к двухполюсному электродвигателю) к номинальному значению угловой частоты напряжения статора Ω1н. . Структурная схема асинхронного электродвигателя при управлении напряжением статора показана на рис. 2. Рис.2. 2.3 Статические характеристики САУ на основе АД 2.3.1 Статические характеристики САУ при Для ...
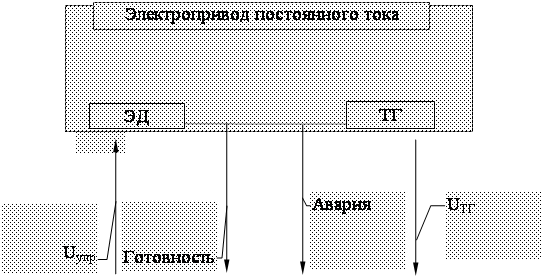
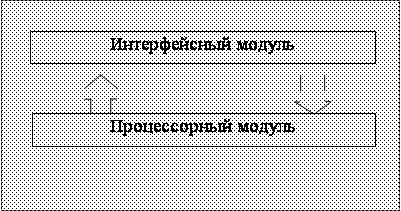
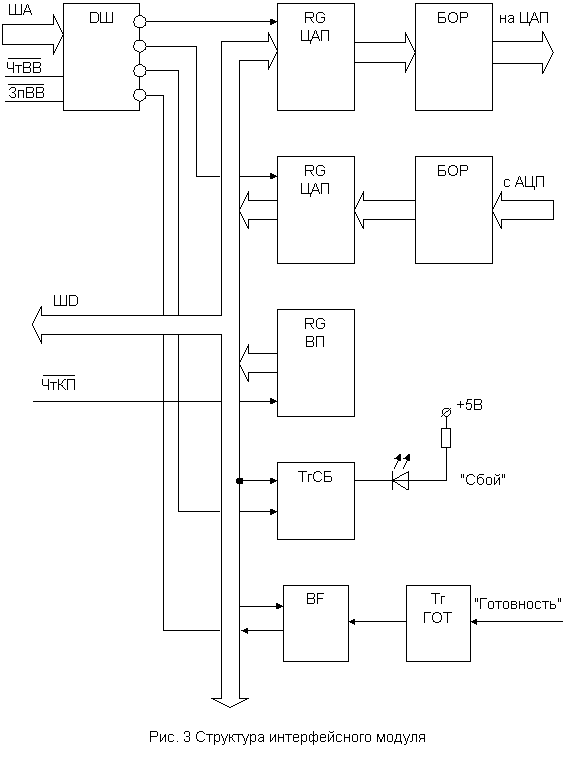
... и контролировать фактическую ее величину по уровню постоянного напряжения, снимаемого с тахогенератора Uтг (рис. 1). Рис. 1 Структура электропривода постоянного тока с микропроцессорным управлением В состав МП контроллера входят два модуля: процессорный и интерфейсный. Процессорный модуль осуществляет отработку управляющих про грамм для реализации ...
... питания обмотки возбуждения; силовой трансформатор; коммутационная и защитная аппаратура в цепях постоянного и переменного тока; сглаживающий реактор в цепи постоянного тока; устройство динамического торможения; система управления электроприводом; комплект аппаратов, приборов и устройств, обеспечивающих оперативное управление, контроль состояния и сигнализацию электропривода; узлы питания ...
... контура регулирования контур регулирования скорости двигателя. 4. Выбор комплектного тиристорного электропривода На основании выбранного электродвигателя произведем выбор промышленного комплектного тиристорного электропривода постоянного тока серии КТЭУ. Выбираем тиристорный электропривод КТЭУ 500/220-532-1ВМТД-УХЛ4. 800- Номинальный выходной ток 220- Номинальное выходное напряжение. 5- ...
0 комментариев