Тенденции развития современных ультразвукових сканеров
Ультразвуковая аппаратура для диагностики является одной из самых «благодарных» отраслей медицинской интроскопии – даже на относительно небольшие усовершенствования, не требующие капитальных вложений, она отвечает улучшением качества изображения и других информационных сигналов. Однако технический уровень УЗ сканеров приближается к такому пределу, когда идет борьба за десятые доли процента воспроизведения акустического контраста, продольной и поперечной разрешающей способности. Для покорения этих десятых долей требуются новые идеи, новая элементная база.
В части аналоговых средств наблюдается тенденция выпуска и внедрения специальных аналоговых микросхем, объединяющих в себе несколько функций, причем удельный вес аналоговых узлов постоянно сокращается. Функции, которые раньше выполнялись аналоговыми средствами, все больше перекладываются на цифровые устройства – задержка эхосигналов для динамической фокусировки, детектирование, фильтрация, логарифмическое сжатие динамического диапазона и многое другое. При этом сводятся к минимуму такие стохастические явления, как шум и дрейф. Электронная база становится несколько дороже, но зато отпадает необходимость в изготовлении аналоговых линий задержки.
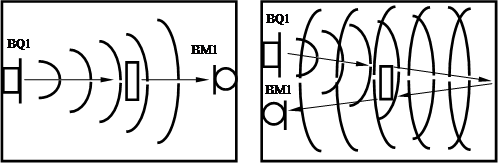
В арсенале режимов УЗ сканеров высокого уровня обязательно присутствует доплеровский режим, который является эффективным средством для исследования сердечно-сосудистой системы, что гарантирует УЗ сканерам первенство в этой области. Кратко напомним сущность эффекта Доплера, который наблюдается при отражении УЗ колебаний от движущегося объекта. Если объект, движущийся со скоростью v, облучать УЗ колебаниями, распространяющимися со скоростью с (рис.1), то частота отраженного сигнала будет отличаться от частоты f0 зондирующих колебаний на величину доплеровского смещения
![]() . (1)
. (1)
Формула (1) получена в предположении v << c. Знак «минус» в ней соответствует удалению объекта от зонда, т.е. при удалении объекта частота принимаемых колебаний уменьшается.
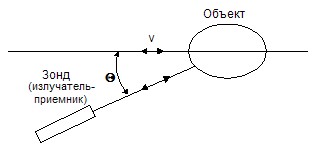
Рисунок 1. УЗ локация движущегося объекта
Рассмотрим простой пример. Пусть объектом локации является сердце, а отраженный сигнал принимается от стенки миокарда. Примем частоту излучаемых колебаний f0 = 3 МГц, скорость движения миокарда v равной 5 см/c, а угол q равным нулю. По формуле (1) находим fсм = 200 Гц. Могут быть приняты также УЗ колебания, отраженные от клапанов, которые движутся быстрее, чем миокард, поэтому и частота смещения для них будет больше. Подвижными объектами в организме являются также стенки сосудов и сама кровь. УЗ колебания отражаются от движущихся скоплений (аггломераций) эритроцитов, объем которых составляет 25% объема крови. Доплеровское смещение частоты будет при этом пропорционально скорости кровотока. Зная ее величину и геометрические размеры сечения сосуда, можно определить ударный объем крови и другие важные параметры гемодинамики.
Структурная схема выделения сигнала доплеровского смещения приведена на рис.2. Такая схема носит название квадратурного синхронного детектора. Она будет нам встречаться еще не раз. Генератор УЗ колебаний, который здесь играет также и роль гетеродина, возбуждает источник излучения ИИ и вырабатывает квадратурные, т.е. сдвинутые по фазе на 90о, опорные сигналы, условно обозначенные как cosf0 и sinf0. Приемник излучения ПИ выдает сигнал со смещенной частотой f0 + fсм. В принципе, источник и приемник могут представлять собой один и тот же преобразователь.
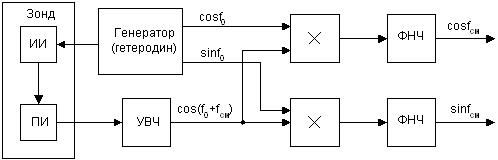 |
Рисунок 2. Квадратурный детектор сигналов доплеровского смещения
Перемножающие устройства производят перемножение квадратурных опорных сигналов с усиленным сигналом приемника. Известные тригонометрические преобразования дают следующие соотношения
cos(f0+fсм) ´ сosf0 =![]() [cos(2f0+fсм) + cosfсм],
[cos(2f0+fсм) + cosfсм],
сos(f0+fсм) ´ sinf0 = ![]() [sin(2f0+fсм) - sinfсм]. (2)
[sin(2f0+fсм) - sinfсм]. (2)
Первые слагаемые в правых частях выражений (2) представляют собой высокочастотные составляющие, которые отфильтровываются фильтрами НЧ. При изменении направления движения объекта меняется знак (фаза) у синусной составляющей сигнала смещения. По этому признаку можно определять направление движения различных органов сердца и кровотока. Скорость объекта рассчитывается по частоте смещения fсм.
В УЗ сканерах может быть два вида доплеровского режима: цветной и спектральный – цветной «доплер» и спектральный «доплер». В цветном «доплере» на В-эхограмме сечения кровеносных сосудов выделяются цветом – обычно синим и красным. Цвет определяет направление кровотока, а его насыщенность – скорость. Сечения сосудов, в которых кровь движется по направлению к датчику, принято выделять красным цветом, а сосуды, в которых кровоток направлен от датчика, – синим. В спектральном «доплере» анализируют частотный спектр сигналов смещения, применяя обычно для этого быстрое преобразование Фурье (БПФ). При этом определяют количественные характеристики гемодинамики: скорость кровотока, ударный объем крови и др. Например, ударный объем крови определяют путем интегрирования объемной скорости (произведения площади сечения на скорость) за одно сокращение сердца. Для этого курсором выделяется сечение исследуемого сосуда и запускается соответствующий программный блок, который вычисляет площадь сечения и выполняет другие необходимые математические операции.
В некоторых УЗ аппаратах производят даже «озвучивание» частотного спектра. Это позволяет воспринимать его на слух. При этом движению разных органов сердца будут соответствовать звуки различной частоты. Получается своеобразный ультразвуковой фонендоскоп. Правда, серьезные разработчики считают это некими рудиментами, идущими еще от аналоговых доплеровских приборов.
Рассмотрим некоторые особенности аппаратных реализаций современных УЗ сканеров. Еще раз отметим, что объем аналоговых средств в них сокращен до минимума. По существу, из аналоговых устройств остались лишь те, без которых немыслимо обойтись при любом уровне развития техники: это генератор для возбуждения УЗ колебаний, малошумящий предварительный усилитель и в некоторых случаях аналоговые коммутаторы. Типичная схема универсального передатчика УЗ колебаний приведена на рис.3.
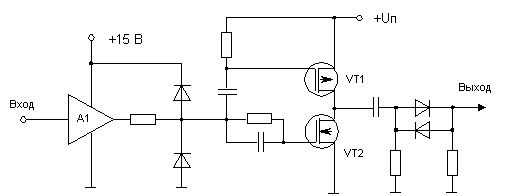 |
Рисунок 3. Универсальный передатчик УЗ колебаний
Здесь А1 – мощный быстродействующий преобразователь уровня ТТЛ – КМОП (например, МАХ 4427 фирмы Maxim, ТС4427 фирмы Telcom и др.), VT1, VT2 – комплементарная пара мощных полевых транзисторов. Короткие импульсы уровня ТТЛ (около 3 В) преобразуются в импульсы амплитудой до 15 В. Такой передатчик имеет более высокий КПД, чем схемы рис.1 и рис.2. Кроме того, в нем посредством RC-цепей и диодной пары на выходе удается получить любую желаемую форму импульса возбуждения. Напряжение питания выходного каскада зависит от типа датчика и имеет величину около 50 В для многоэлементных датчиков и 200 – 250 В для секторных механических. У многоэлементных датчиков каждый элемент апертуры возбуждается отдельным генератором такого типа, и их число может быть большим (16 – 48).
Для фокусировки луча при передаче на вход А1 передатчиков импульсы подают с требуемой задержкой от цифрового устройства. Однако в отличие от ранее рассмотренного способа, характеризуемого некоторой аппаратной громоздкостью, требуемые задержки записываются не в регистры, а в специальные ОЗУ (рис.3). В них заносятся эпюры запускающих сигналов в виде групп подряд идущих единиц. ОЗУ может быть выполнено из однобитовых микросхем памяти по числу элементов апертуры n. Запись данных в ОЗУ производится через мультиплексор D3 по сигналу WR.
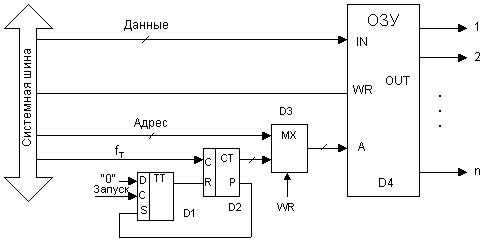 |
Рисунок 3. Цифровая задержка с памятью для фокусировки при передаче
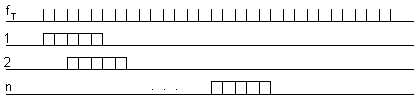 |
В рабочем режиме импульсом «Запуск» (начало УЗ луча) триггер D1 сбрасывается и разрешает работу счетчика D2, который тактируется импульсами тактовой частоты fТ. Выходной код счетчика служит адресом для считывания и поступает в ОЗУ через второй канал мультиплексора. Момент появления управляющих импульсов на выходах микросхем ОЗУ зависит от местонахождения группы единиц в памяти и тактовой частоты fТ. Эпюры запускающих сигналов показаны на рис.4.
Рисунок 4. Представление эпюр запускающих сигналов в ОЗУ
Как мы знаем, в ходе сканирования меняется положение элементов апертуры относительно ее оси симметрии, и в связи с этим должны меняться и задержки запускающих импульсов. Их новые эпюры могут быть занесены в ОЗУ по окончании последнего запускающего импульса в течение хода УЗ луча. Времени для этого вполне достаточно. Точность задержки зависит от тактовой частоты fТ. При fТ = 100 МГц она составит 10 нс.
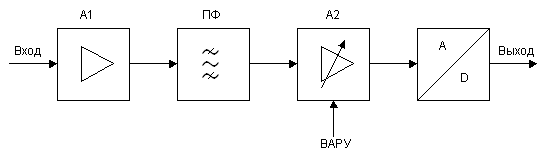 |
Аналоговый тракт современного УЗ сканера имеет вид, показанный на рис.5. Эхо-сигнал усиливается малошумящим предусилителем А1, проходит через полосовой фильтр ПФ с регулируемой полосой пропускания и усиливается усилителем с регулируемым коэффициентом усиления А2, на который воздействуют управляющие сигналы ВАРУ. После этого сигнал преобразуется в цифровую форму. На этом аналоговый этап преобразований эхо-сигналов заканчивается, и далее над ним производятся только цифровые преобразования.
Рисунок 5. Аналоговый тракт современного УЗ сканера
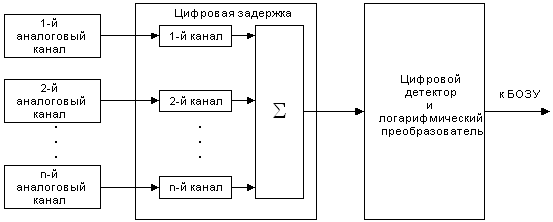 |
Наиболее сложна часть цифрового тракта, заменившая аналоговые узлы, выполнявшие функции фокусировки луча при приеме, детектирование и логарифмическое преобразование эхо-сигналов от многоэлементных датчиков. Структурная схема этой части показана на рис.6.
Рисунок 6. Цифровое преобразование параметров эхо-сигнала
Выходные сигналы аналоговых трактов апертуры уже в цифровой форме направляются в свои каналы цифровой задержки и затем суммируются цифровым сумматором. Результирующий цифровой эхо-сигнал подвергается цифровому детектированию, а затем – логарифмированию. Отметим, что в полностью аналоговых трактах эти процедуры протекали в другой последовательности.
Цифровая задержка эхо-сигналов основана на сдвиге во времени результатов АЦ-преобразования каждого канала по отношению к моменту окончания преобразования. Структурная схема одного канала цифровой задержки показана на рис. 7.
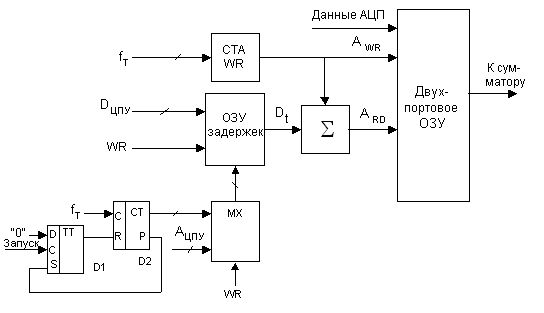 |
Рисунок 7. Канал цифровой задержки эхо-сигналов
Поступающие с АЦП данные записываются в двухпортовое ОЗУ по адресам AWR, выставляемым счетчиком СТА, а считываются эти данные по адресам ARD. Они представляют собой сумму адреса AWR и данных, которые устанавливаются в ОЗУ задержек. Сразу после записи данных АЦП происходит переключение в режим чтения, и данные из ОЗУ задержек начинают суммироваться с адресом AWR. Через некоторое число тактов fT наступает равенство ARD и AWR, по которому была произведена запись данных АЦП. Это число тактов и величина fT и определяют время задержки. В этом же канале производят апподизацию – умножение выходного сигнала на некоторый коэффициент, который записывается в то же ОЗУ, что и задержки. Апподизация предназначена для формирования желаемой характеристики направленности антенной решетки при приеме (например, для исключения боковых лепестков).
Раньше было показано, что различие в задержках соседних каналов апертуры составляет десятки нс. Поэтому для точной установки задержек тактовая частота должна быть очень высокой – 50 – 100 МГц. Очевидно, что такой же должна быть и частота преобразования АЦП. Она намного выше той, которая была рассчитана в начале раздела 2.6. Конечно, в проектировании таких АЦП возникают определенные сложности (экранирование блока и др.). Однако при такой высокой скорости преобразования появляется возможность формировать точку фокуса на каждом дискретном отсчете вдоль луча, т.е. получается фокус, следящий за движением фронта отраженного сигнала. Естественно, это дает повышение четкости изображения.
На рис.8 приведена структурная схема блока цифрового детектора и логарифмического преобразователя. Здесь завершается подготовка сигналов перед их записью в буферное ОЗУ. Еще раз подчеркнем, что все в этом блоке – цифровое!
Данные с выхода сумматора (см. рис.8) перемножаются с квадратурными сигналами sinf0 и cosf0 гетеродина, после чего фильтруются фильтрами НЧ. Эта часть схемы напоминает квадратурный детектор сигналов доплеровского смещения. И это не случайно – квадратурные составляющие отфильтрованного сигнала Im(D) и Re(D) используются как в доплеровских каналах, так и в черно-белом.
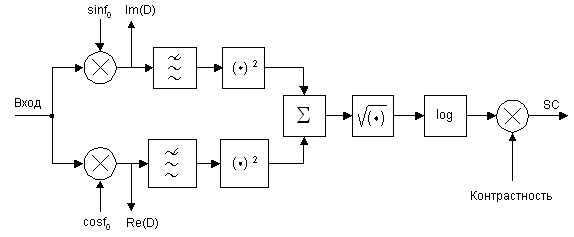 |
Рисунок 8. Цифровой детектор и логарифмический преобразователь
Для обеспечения хорошей избирательности фильтры должны обладать прямоугольностью характеристики. Как правило, используются фильтры высокого порядка с характеристиками Чебышева или Бесселя. Процедуры возведения в квадрат, суммирования и извлечение корня соответствуют нахождению амплитуды сигнала (амплитудное детектирование). Извлечение корня и логарифмирование могут быть выполнены с помощью ПЗУ. На выходе сигнал умножается на некоторый коэффициент, регулирующий контрастность.
Частота гетеродина может перестраиваться в зависимости от режима – черно-белый или доплеровский. При этом перестраивается и полоса пропускания фильтров. После фильтров частота сигналов понижается до 2 – 3 МГц в черно-белом режиме.
Масштабно-координатные преобразования в конверторе изображения в целом осуществляются посредством выше описанных алгоритмов и устройств. Устройства цифровой обработки реализуются на специализированных заказных БИС или на программируемых пользователем вентильных матрицах (FPGA – Field Programmable Gate Array), например, фирм Xilinx, Altera и др. У нас эти матрицы называются ПЛИС – программируемые логические интегральные схемы.
В ранних поколениях цифровых сканеров использовались управляющие ЭВМ собственной разработки. Сейчас рынок предлагает широкий ассортимент ПЭВМ, которые по всем параметрам – требуемому быстродействию, интерфейсу, программному обеспечению и отображению информации – удовлетворяют разработчиков. Они теперь просто препарируют какой-либо компьютер высокого класса, изымая из него и приспосабливая для своих нужд материнскую плату и периферийные блоки. Для отображения информации используют его же «родной» монитор. И это обходится дешевле, чем разработка и изготовление собственной микроЭВМ.
В качестве операционной системы производящие фирмы используют самые различные базы: от Linux до Win 7 и Win NT. Использование стандартных аппаратных и программных средств естественным образом дополняет УЗ сканер возможностями архивации, обработки и коммуникации.
Сюда можно также отнести фирму Hewlett-Packard, которая выпускает УЗ аппараты типа HP Sonos 500 и 1000. Эти аппараты имеют динамическую регулируемую фокусировку. Фирма Philips поставляет системы среднего класса с широкой номенклатурой специализированных датчиков. Помимо ведущих фирм относительно простую и дешевую УЗ диагностическую аппаратуру на рынок поставляют много других фирм. И она находит своих потребителей.
Большая научная и практическая работа в области создания УЗ диагностической аппаратуры ведется и в Украине. В частности, НИИ радиоизмерений (г. Харьков) разработал и выпускает малыми сериями УЗ сканер типа ТИ-628 и готовится к серийному производству аппарата высокого класса, проводит работу по созданию механических датчиков новой конструкции, разрабатывает новые конфигурации системы управления УЗ сканером. Весьма перспективной считается разработка и выпуск портативных УЗ сканеров с небольшим комплектом (1 – 2 ) секторных датчиков.
Похожие работы
... форме, что в итоге приведет к сокращению административных расходов; Ø содействовать реализации торговой политики с учетом социально-экономических и инвестиционных задач. 1.2 Технические средства таможенного контроля как часть таможенной инфраструктуры Все элементы инфраструктурного обеспечения деятельности таможенной службы можно разделить на три большие группы [46]: 1) ...
... и вычислительной мощности суперкомпьютера для проведения расчетов, анализа и оптимизации новых конструкций на этапе электронной модели изделия. Прогнозирование финансово-хозяйственной деятельности ОАО «Горизонт» Мировые тенденции развития телевизионной отрасли диктуют предприятию необходимость перехода к многопрофильному производству. На предприятии разработана Программа развития ОАО « ...

... . Однако из-за огромной разницы в цене и необязательности для среднего автосервиса наличия возможностей дилерского прибора, мультимарочные сканеры надежно заняли свою нишу на рынке диагностического оборудования. Универсальные мультимарочные сканеры. Сканеры, поставляемые на рынок универсальных ремонтных предприятий, как правило, обеспечивают считывание и стирание кодов ошибок, вывод цифровых ...
... , элементы питания – 2400 мм2) высота пульта управления с учётом ширины корпуса будет равна 10 мм. 7. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ 7.1 Характеристика проекта Проектируемая система представляет собой систему охранной сигнализации автомобилей. В разрабатываемой системе будут реализованы функции, как автономной охраны, так и централизованной. Так, например, она будет в режиме «Тревога» ...
0 комментариев