Содержание
1. Силовое оборудование.
1.2. Двигатели внутреннего сгорания.
1.3. Электрические двигатели.
2 Приводы строительных машин.
2.1. Гидравлические приводы.
2.2. Пневматический привод.
2.2.1. Особенности пневматического привода, достоинства и недостатки.
2.3. Электрический привод.
3. Трансмиссии.
3.1. Силовая передача.
3.2. Сцепление.
3.3. Карданная передача.
3.4. Дифференциальный механизм.
Список литературы.
1.1.Двигатель внутреннего сгорания
Двигатель внутреннего сгорания — это тип двигателя, тепловая машина, в которой химическая энергия топлива (обычно применяется жидкое или газообразное углеводородное топливо), сгорающего в рабочей зоне, преобразуется в механическую работу.
Несмотря на то, что двигатели внутреннего сгорания являются весьма несовершенным типом тепловых машин (низкий КПД, сильный шум, токсичные выбросы, меньший ресурс), благодаря своей автономности (необходимое топливо содержит гораздо больше энергии, чем лучшие электрические аккумуляторы) двигатели внутреннего сгорания очень широко распространены, например на транспорте.
Схема работы четырехтактного цилиндра двигателя, цикл Отто
1. впуск
2. сжатие
3. рабочий цикл
4. выпуск
Основными типами ДВС являются:
Поршневые двигатели — камерой сгорания является цилиндр, где тепловая энергия топлива превращается в механическую энергию, которая из возвратно-поступательного движения поршня превращается во вращательную, с помощью кривошипно-шатунного механизма.
По типу используемого топлива делятся на:
Бензиновые — смесь топлива с воздухом готовится в карбюраторе и далее во впускном коллекторе, или во впускном коллекторе при помощи распыляющих форсунок (механических или электрических), или непосредственно в цилиндре при помощи распыляющих форсунок, далее смесь подаётся в цилиндр, сжимается, а затем поджигается при помощи искры, проскакивающей между электродами свечи.
Дизельные —специальное дизельное топливо впрыскивается в цилиндр под высоким давлением. Возгорание смеси происходит под действием высокого давления и, как следствие, температуры в камере.
Газовые — двигатель, сжигающий в качестве топлива углеводороды, находящиеся в газообразном состоянии при нормальных условиях:
смеси сжиженных газов — хранятся в баллоне под давлением насыщенных паров (до 16 атм). Испаренная в испарителе жидкая фаза или паровая фаза смеси ступенчато теряет давление в газовом редукторе до близкого атмосферному, и всасывается двигателем во впускной коллектор через воздушно-газовый смеситель или впрыскивается во впускной коллектор посредством электрических форсунок. Зажигание осуществляется при помощи искры, проскакивающей между электродами свечи.
сжатые природные газы — хранятся в баллоне под давлением 150—200 атм. Устройство систем питания аналогично системам питания сжиженным газом, отличие — отсутствие испарителя.
генераторный газ — газ, полученный превращением твердого топлива в газообразное. В качестве твердого топлива используются:
уголь
торф
древесина
Газодизельные — основная порция топлива приготавливается, как в одной из разновидностей газовых двигателей, но зажигается не электрической свечой, а запальной порцией дизтоплива, впрыскиваемого в цилиндр аналогично дизельному двигателю.
Роторно-поршневые — за счет вращения в камере сгорания многогранного ротора динамически формируются объёмы, в которых происходит обычный цикл ДВС.
Газотурбинные двигатели — энергия расширяющихся продуктов горения передаётся на лопатки газовой турбины.
ДВС с впрыском воды.
Дополнительные агрегаты, требующиеся для ДВС
Недостатком ДВС является то, что он производит высокую мощность только в узком диапазоне оборотов. Поэтому неотъемлемыми атрибутами двигателя внутреннего сгорания являются трансмиссия и стартер. Лишь в отдельных случаях (например, в самолётах) можно обойтись без сложной трансмиссии.
Также ДВС нужны топливная система (для подачи топливной смеси) и выхлопная система (для отвода выхлопных газов).
1.2.Двигатель электрический
Двигатель электрический, машина, преобразующая электрическую энергию в механическую. Д. э. — основной вид двигателя в промышленности (см. Электропривод), на транспорте (см. Тяговый электродвигатель), в быту и т. д. По роду тока различают постоянного тока электродвигатели, основное преимущество которых заключается в возможности экономичной и плавной регулировки частоты вращения, и двигатели переменного тока. К последним относятся: синхронные электродвигатели, у которых частота вращения жестко связана с частотой питающего тока; асинхронные электродвигатели, частота вращения которых уменьшается с ростом нагрузки; коллекторные электродвигатели с плавной регулировкой частоты вращения в широких пределах.
Наиболее распространены асинхронные Д. э.; они просты в производстве и надёжны в эксплуатации (особенно короткозамкнутые). Их главные недостатки: значительное потребление реактивной мощности и невозможность плавного регулирования частоты вращения. Во многих мощных электроприводах применяют синхронные Д. э. В тех случаях, когда необходимо регулировать частоту вращения, пользуются Д. э. постоянного тока и значительно реже в этих случаях применяют более дорогие и менее надёжные коллекторные Д. э. переменного тока. Мощность Д. э. от десятых долей вт до десятков Мвт. Различают Д. э. в открытом исполнении, в которых вращающиеся и токоведущие части защищены от случайного прикосновения и попадания посторонних предметов; в защищенном исполнении (в т. ч. капле- и брызгозащищённые); закрытые (пыле- и влагозащищённые) и герметичные; взрывобезопасные, в которых пламя не выходит за пределы двигателя при взрыве газов внутри него.
2.Приводом называется совокупность силового оборудования, трансмиссии и систем управления, обеспечивающих привидение в действие механизмов машины и рабочих органов.
2.1.Гидравлический привод строительных машин
В большинстве современных моделей универсальных одноковшовых экскаваторов, самоходных стреловых кранов, погрузчиков, бульдозеров, скреперов и других строительных машинах для передачи мощности от двигателя к рабочим механизмам применяется гидравлический объемный (статический) привод. В объемном гидроприводе используется энергия (статический напор) практически несжимаемой рабочей жидкости (минеральное масло), нагнетаемой гидравлическими насосами.
Рабочая жидкость всасывается-из бака через фильтр насосом и подается через золотниковое распределительное устройство в одну из полостей силовых цилиндров. Из противоположных полостей через тот же распределитель рабочая жидкость сливается в бак.
Для предохранения гидросистемы от перегрузок на нагнетательной линии устанавливают предохранительный клапан, сбрасывающий при максимальном давлении, на которое он отрегулирован, избыток рабочей жидкости обратно в бак. Привод насоса осуществляется от основного двигателя машины.
В гидроприводах строительных машин широко распространены шестеренные, аксиально-поршневые насосы и гидромоторы.
Насосы преобразуют механическую энергию привода в энергию потока рабочей жидкости; гидромоторы преобразуют энергию потока рабочей жидкости в механическую, вращая приводные валы механизмов.
Шестеренные насосы выполняют с внешним и внутренним зацеплением. Они могут иметь одну или несколько секций. На рис. 1.2 приведена схема односекционного насоса типа НШ с внешним зацеплением. При вращении шестерен, в направлении, указанном стрелками, рабочая жидкость из бака поступает во всасывающую камеру корпуса 3 насоса. Из камеры всасывания жидкость, заключенная во впадинах шестерен, переносится в камеру нагнетания и выдавливается в рабочую магистраль. Число зубьев шестерен колеблется в пределах от 6 до 12. Односекционные насосы развивают рабочее давление до 100 кгс/см2 (10 МП а).
Для получения больших давлений — до 140 кгс/см2 (14 МПа) иногда применяют многосекционные насосы, состоящие из нескольких пар шестерен — секций (обычно двух или трех), расположенных последовательно.
Шестеренные насосы просты по конструкции, малогабаритны и имеют невысокую стоимость. Основные их недостатки — сравнительно малый КПД (0,6—0,75) и небольшой срок службы при работе с высоким Давлением.
Аксиально-поршневые насосы и гидромоторы (рис. 1.3) аналогичны по конструкции и состоят из неподвижного распределительного диска, вращающегося блока поршней со штоками и приводного вала. Блок имеет восемь расположенных по окружности цилиндров. Приводной вал, опирающийся на три шарикоподшипника, передает вращение блоку цилиндров через универсальный шарнир (карданный вал). Поршни также шарнирно связаны с приводным валом при помощи штоков, шаровые головки которых завальцованы во фланцевой части вала.
Блок, вращающийся на шарикоподшипнике, расположен к приводному валу под углом сс = 30°. Благодаря этому при вращении вала поршни движутся вместе с блоком и одновременно перемещаются возвратно-поступательно вдоль оси цилиндров 6, попеременно засасывая рабочую жидкость из всасывающей магистрали и выталкивая ее в напорную магистраль. Блок цилиндров прижат пружиной к неподвижному распределительному Всасывание диску. В диске имеются два дуговых окна (рис. 1.3,6), через одно из которых жидкость засасывается из бака, а через другое нагнетается поршнями в напорную магистраль. Перемычки между окнами отделяют полость всасывания от полости нагнетания. При вращении блока отверстия цилиндров соединяются либо со всасываюющей, либо с напорной магистралями. За половину оборота вала каждый поршень перемещается к верхнему торцу блока, при этом рабочая жидкость засасывается под поршень из всасывающей магистрали через всасывающее окно распределительного диска. За следующую половину оборота поршень движется к нижнему торцу блока, при этом жидкость вытесняется из-под поршня через нагнетательное окно диска в напорную магистраль.
При использовании аксиально-поршневого насоса в качестве гидродвигателя по напорной магистрали от насоса нагнетается рабочая жидкость и ее давление на поршни преобразуется во вращение приводного вала. Отработавшая жидкость отводится от гидродвигателя по сливному трубопроводу. Для реверсирования гидродвигателя меняют местами нагнетательный и сливной трубопроводы или изменяют направление потоков жидкости в них на противоположное.
Современные аксиально-поршневые насосы развивают рабочее давление до 160—175 кгс/см2 (16—17,5 МПа) и выше и имеют высокий КПД —до 0,96—0,98.
Различают регулируемые (переменной подачи) и нерегулируемые (постоянной подачи) аксиально-поршневые насосы. У нерегулируемых насосов угол а наклона вращающегося блока цилиндров по отношению к оси приводного вала постоянен. В регулируемом насосе имеется возможность изменения угла наклона качающего блока цилиндров в процессе работы. При плавном изменении угла взаимного расположения вала и блока цилиндров будут соответственно плавно обратно пропорционально изменяться подача жидкости Q (или производительность насоса) и давление р, развиваемое насосом, при неизменной мощности насоса N, так как N=pQ. Причем если этот угол изменить на противоположный, то насос изменит направление подачи жидкости также на противоположное.
Аксиально-поршневые насосы переменной подачи, снабженные устройствами для поворота оси блока в зависимости от давления в системе, используют для автоматического регулирования усилия и скорости рабочего органа или исполнительного механизма машины при колебаниях внешней нагрузки.
На некоторых моделях современных строительных машин установлены сдвоенные аксиально-поршневые насосы, которые состоят из двух унифицированных качающих узлов, смонтированных в одном корпусе. Сдвоенные насосы применяют в случае, когда для обслуживания системы гидропривода машины необходимо создать два потока рабочей жидкости.
Такие насосы развивают рабочее давление в системе гидропривода до 250—300 кгс/см2 (25—30 МПа). По числу устанавливаемых насосов или потоков жидкости, подаваемых в напорные линии, классифицируют системы гидропривода стррительных машин. На отечественных машинах наибольшее распространение получила двухпоточная система привода, в которой рабочая жидкость от двух или трех насосов (секций насоса) подается в две напорные линии.
Гидроцилиндры — простейшие гидравлические двигатели с возвратно-поступательным движением подвижного звена, применяемые для привода элементов рабочего оборудования строительных машин. Различают гидроцилиндры одностороннего действия (плунжерные), передающие принудительное движением звену только в одном направлении, и двустороннего действия, у которых подвижное звено может принудительно перемещаться в противоположных направлениях. Основными элементами гидроцилиндра двустороннего действия (рис. 1.4) являются: цилиндрический корпус и поршень со штоком. Подвижным звеном может служить корпус или шток.
Наибольшее распространение в строительных машинах с гидравлическим приводом получили гидроцилиндры двустороннего действия с односторонним штоком. Они аналогичны по конструкции и принципу действия и отличаются друг от друга диаметром и ходом поршня. Полость гидроцилиндра, в которой расположен шток, называется штоковой, противоположная — поршневой.
Рабочая жидкость в поршневую и штоковую полости поступает через штуцера. При подаче жидкости под давлением от насоса в поршневую полость шток выдвигается из гидроцилиндра, а при подаче жидкости в штоковую полость — втягивается в него. Герметичное разделение штоковой и поршневой полостей обеспечивается уплотнением поршня. Уплотнение штока препятствует утечке рабочей жидкости из штоковой полости.
Отверстия в хвостовике корпуса и головке штока служат для присоединения гидроцилиндра посредством шарниров к рабочим органам и несущим конструкциям машины. Для компенсации перекосов соединяемых элементов гидроцилиндры устанавливают на сферических подшипниках.
Управление гидродвигателями осуществляется распределительными устройствами (распределителями). Они направляют поток рабочей жидкости от насоса по трубопроводам к рабочим полостям гидродвигателей, управляют последовательностью их действия и обеспечивают отвод жидкости из сливных полостей в бак. Кроме того, распределительные устройства реверсируют гидродвигатели и регулируют их скорость.
В гидросистемах строительных машин применяют главным образом золотниковые распределители. По числу присоединенных каналов золотниковые распределители делят на двух-, трех- и четырехходовые. Для управления гидродвигателями двустороннего действия применяют, как правило, четырехходовые распределители с четырьмя каналами (напор, слив и два рабочих отвода). По числу фиксированных положений золотника — рабочих позиций — различают трех- и четырехпозиционные распределители. Положения золотника трехпозиционного распределителя — два рабочих и одно нейтральное, четырехпозиционного — два рабочих, одно нейтральное и одно плавающее.
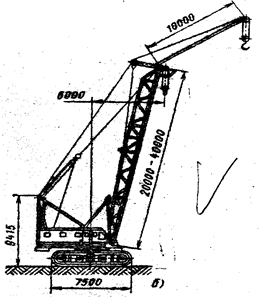
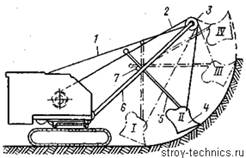
Трехпозиционный четырехканальный распределитель (см. рис. 1.1) управляет подачей рабочей жидкости в гидроцилиндры механизма подъема стрелы. При помощи его можно попеременно соединять напорную и сливную линии либо с трубопроводом (рабочее положение рукоятки управления 6), либо с трубопроводом (положение Р2), меняя таким образом направление движения штоков гидроцилиндров. В нейтральном положении золотника (положение Н) можно останавливать штоки гидроцилиндров и связанную с ними стрелу в любом положении, запирая входы в оба трубопровода. При запирании линий распределитель соединяет напорную и сливную линии и обеспечивает разгрузку непрерывно работающего и подающего рабочую жидкость насоса.
Четырехсекционный распределитель обеспечивает четвертое — плавающее положение штока гидроцилиндра. В плавающем положении золотник отсекает от напорной линии распределителя обе полости гидроцилиндра и соединяет их со сливной линией, в результате чего шток или цилиндр может свободно перемещаться под действием внешней нагрузки.
Золотниковые распределители выпускают в двух исполнениях—моноблочном и секционном (разборном). У моноблочного распределителя все золотниковые секции выполнены в одном литом корпусе, число секций постоянно. У секционного распределителя каждый золотник установлен в отдельном корпусе (секции), присоединяемом к таким же смежным унифицированным секциям. Число секций секционного распределителя можно уменьшать или увеличивать путем перемонтажа. На большинстве отечественных машин установлены секционные распределители. В систему управления, входят также клапаны различного назначения и дроссели.
Предохранительные клапаны ограничивают повышение давления жидкости в системе сверхдопустимого и защищают элементы гидросистемы от перегрузок. Клапаны регулируют на давление, превышающее номинальное на 10—15%. При давлении, превышающем рабочее, клапан открывается и перепускает жидкость в сливную линию.
Редукционные клапаны понижают давление подаваемой в систему жидкости до определенной величины независимо от давления, развиваемого насосом.
Обратные клапаны служат для пропуска потока жидкости только в одном направлении.
Дроссели представляют собой местные гидравлические сопротивления и предназначены для изменения объема подачи жидкости в гидродвигатели: в гидроцилиндр в целях регулирования скорости движения штока или в гидромотор для регулирования частоты его вращения. Обычно дроссель ставят на трубопроводе, соединяющем сливную и напорную линии. Дроссель отводит часть потока жидкости в сливную линию, уменьшая тем самым подачу в гидродвигатель.
Гидродинамические передачи. Гидродинамическая передача представляет собой гидромуфту (применяется редко) или гидротрансформатор, принцип действия которых основан на гидродинамической связи между их ведущими и ведомыми элементами. Гидромуфта или гидротрансформатор обычно связывают валы двигателя и исполнительного механизма.
Гидротрансформатор (рис. 1.5) обеспечивает плавное автоматическое изменение величины передаваемого крутящего момента в зависимости от меняющейся- внешней нагрузки. Он состоит из трех колес, снабженных радиально расположенными криволинейными лопатками: ведущего (насоса), жестко связанного с валом двигателя; ведомого (турбины), соединенного с валом исполнительного механизма и промежуточного направляющего 3 (реактора), закрепленного неподвижно. Полость корпуса гидротрансформатора заполнена маловязким маслом. При вращении насоса его лопатки отбрасывают масло в сторону турбины. Ударяясь о лопатки турбины, масло отдает ей часть кинетической энергии, вследствие чего турбина начинает вращаться в одном направлении с насосом. Из турбины масло перетекает в направлении, обратном вращению насоса, к неподвижным лопаткам реактора, ударяется о них и, изменив направление вращения, поступает затем в насос. В результате удара на лопатках реактора возникает усилие, вызывающее появление реактивного момента, воздействующего на тубину. Таким образом, на турбину действуют два момента: крутящий моментдвигателя, передаваемый через поток ротранеформатора жидкости от насоса, и реактивный момент.
Это позволяет получать на выходном валу гидротрансформатора крутящий момент, превышающий момент приводного двигателя. При уменьшении частоты вращения турбины с увеличением внешней нагрузки автоматически увеличивается реактивный и, следовательно, суммарный крутящий момент на выходном валу. Отношение максимального крутящего момента к моменту двигателя, называемое коэффициентом трансформации, составляет 2,5—3,5.
Применение гидротрансформатора в трансмиссиях машин позволяет предохранить двигатель от перегрузок, улучшить тяговые качества машин, упростить их кинематику, повысить производительность.
2.2.Пневматический привод
Любой объект, в котором используется газообразное вещество, можно отнести к газовым системам. Поскольку наиболее доступным газом является воздух, состоящий из смеси множества газов, то его широкое применение для выполнения различных процессов обусловлено самой природой. В переводе с греческого pneumatikos - воздушный, чем и объясняется этимологическое происхождение названия пневматические системы. В технической литературе часто используется более краткий термин - пневматика.
Пневматические устройства начали применять еще в глубокой древности (ветряные двигатели, музыкальные инструменты, кузнечные меха и пр.), но самое широкое распространение они получили вследствие создания надежных источников пневматической энергии - нагнетателей, способных придавать газам необходимый запас потенциальной и (или) кинетической энергии.
Пневматический привод, состоящий из комплекса устройств для приведения в действие машин и механизмов, является далеко не единственным направлением использования воздуха (в общем случае газа) в технике и жизнедеятельности человека. В подтверждение этого положения кратко рассмотрим основные виды пневматических систем, отличающихся как по назначению, так и по способу использования газообразного вещества.
По наличию и причине движения газа все системы можно разделить на три группы.
К первой группе отнесем системы с естественной конвекцией (циркуляцией) газа (чаще всего воздуха), где движение и его направление обусловлено градиентами температуры и плотности природного характера, например, атмосферная оболочка планеты, вентиляционные системы помещений, горных выработок, газоходов и т.п.
Ко второй группе отнесем системы с замкнутыми камерами, не сообщающимися с атмосферой, в которых может изменяться состояние газа вследствие изменения температуры, объема камеры, наддува или отсасывания газа. К ним относятся различные аккумулирующие емкости (пневмобаллоны), пневматические тормозные устройства (пневмобуферы), всевозможные эластичные надувные устройства, пневмогидравлические системы топливных баков летательных аппаратов и многие другие. Примером устройств с использованием вакуума в замкнутой камере могут быть пневмозахваты (пневмоприсоски), которые наиболее эффективны для перемещения штучных листовых изделий (бумага, металл, пластмасса и т.п.) в условиях автоматизированного и роботизированного производства.
К третьей группе следует отнести такие системы, где используется энергия предварительно сжатого газа для выполнения различных работ. В таких системах газ перемещается по магистралям с относительно большой скоростью и обладает значительным запасом энергии. Они могут быть циркуляционными (замкнутыми) и бесциркуляционными. В циркуляционных системах отработавший газ возвращается по магистралям к нагнетателю для повторного использования (как в гидроприводе). Применение систем весьма специфично, например, когда недопустимы утечки газа в окружающее пространство или невозможно применение воздуха из-за его окислительных свойств. Примеры таких систем можно найти в криогенной технике, где в качестве энергоносителя используются агрессивные, токсичные газы или летучие жидкости (аммиак, пропан, сероводород, гелий, фреоны и др.).
В бесциркуляционных системах газ может быть использован потребителем как химический реагент (например, в сварочном производстве, в химической промышленности) или как источник пневматической энергии. В последнем случае в качестве энергоносителя обычно служит воздух. Выделяют три основных направления применения сжатого воздуха.
К первому направлению относятся технологические процессы, где воздух выполняет непосредственно операции обдувки, осушки, распыления, охлаждения, вентиляции, очистки и т.п. Очень широкое распространение получили системы пневмотранспортирования по трубопроводам, особенно в легкой, пищевой, горнодобывающей отраслях промышленности. Штучные и кусковые материалы транспортируются в специальных сосудах (капсулах), а пылевидные в смеси с воздухом перемещаются на относительно большие расстояния аналогично текучим веществам.
Второе направление - использование сжатого воздуха в пневматических системах управления (ПСУ) для автоматического управления технологическими процессами (системы пневмоавтоматики). Это направление получило интенсивное развитие с 60-х годов благодаря созданию универсальной системы элементов промышленной пневмоавтоматики (УСЭППА). Широкая номенклатура УСЭППА (пневматические датчики, переключатели, преобразователи, реле, логические элементы, усилители, струйные устройства, командоаппараты и т.д.) позволяет реализовать на ее базе релейные, аналоговые и аналого-релейные схемы, которые по своим параметрам близки к электротехническим системам. Благодаря высокой надежности они широко используются для циклового программного управления различными машинами, роботами в крупносерийном производстве, в системах управления движением мобильных объектов.
Третьим направлением применения пневмоэнергии, наиболее масштабным по мощности, является пневматический привод, который в научном плане является одним из разделов обшей механики машин. У истоков теории пневматических систем стоял И.И. Артоболевский. Он был руководителем Института машиноведения (ИМАШ) в Ленинграде, где под его руководством в 40 - 60-х годах систематизировались и обобщались накопленные сведения по теории и проектированию пневмосистем. Одной из первых работ по теории пневмосистем была статья А.П. Германа "Применение сжатого воздуха в горном деле", опубликованная в 1933 г., где впервые движение рабочего органа пневмоустройства решается совместно с термодинамическим уравнением состояния параметров воздуха.
Значительный вклад в теорию и практику пневмоприводов внесли ученые Б.Н. Бежанов, К.С. Борисенко, И.А. Бухарин, А.И. Вощинин, Е.В. Герц, Г.В. Крейнии, А.И. Кудрявцев, В.А. Марутов, В.И. Мостков, Ю.А. Цейтлин и другие.
2.2.1.Особенности пневматического привода, достоинства и недостатки
Область и масштабы применения пневматического привода обусловлены его достоинствами и недостатками, вытекающими из особенностей свойств воздуха. В отличие от жидкостей, применяемых в гидроприводах, воздух, как и все газы, обладает высокой сжимаемостью и малой плотностью в исходном атмосферном состоянии (около 1,25 кг/м 3), значительно меньшей вязкостью и большей текучестью, причем его вязкость существенно возрастает при повышении температуры и давления. Отсутствие смазочных свойств воздуха и наличие некоторого количества водяного пара, который при интенсивных термодинамических процессах в изменяющихся объемах рабочих камер пневмомашин может конденсироваться на их рабочих поверхностях, препятствует использованию воздуха без придания ему дополнительных смазочных свойств и влагопонижения. В связи с этим в пневмоприводах имеется потребность кондиционирования воздуха, т.е. придания ему свойств, обеспечивающих работоспособность и продляющих срок службы элементов привода.
С учетом вышеописанных отличительных особенностей воздуха рассмотрим достоинства пневмопривода в сравнении с его конкурентами - гидро- и электроприводом.
1. Простота конструкции и технического обслуживания. Изготовление деталей пневмомашин и пневмоаппаратов не требует такой высокой точности изготовления и герметизации соединений, как в гидроприводе, т.к. возможные утечки воздуха не столь существенно снижают эффективность работы и КПД системы. Внешние утечки воздуха экологически безвредны и относительно легко устраняются. Затраты на монтаж и обслуживание пневмопривода несколько меньше из-за отсутствия возвратных пневмолиний и применения в ряде случаев более гибких и дешевых пластмассовых или резиновых (резинотканевых) труб. В этом отношении пневмопривод не уступает электроприводу. Кроме того, пневмопривод не требует специальных материалов для изготовления деталей, таких как медь, алюминий и т.п., хотя в ряде случаев они используются исключительно для снижения веса или трения в подвижных элементах.
2. Пожаро- и взрывобезопасность. Благодаря этому достоинству пневмопривод не имеет конкурентов для механизации работ в условиях, опасных по воспламенению и взрыву газа и пыли, например в шахтах с обильным выделением метана, в некоторых химических производствах, на мукомольных предприятиях, т.е. там, где недопустимо искрообразование. Применение гидропривода в этих условиях возможно только при наличии централизованного источника питания с передачей гидроэнергии на относительно большое расстояние, что в большинстве случаев экономически нецелесообразно.
3. Надежность работы в широком диапазоне температур, в условиях пыльной и влажной окружающей среды. В таких условиях гидро- и электропривод требуют значительно больших затрат на эксплуатацию, т.к. при температурных перепадах нарушается герметичность гидросистем из-за изменения зазоров и изолирующих свойств электротехнических материалов, что в совокупности с пыльной, влажной и нередко агрессивной окружающей средой приводит к частым отказам. По этой причине пневмопривод является единственным надежным источником энергии для механизации работ в литейном и сварочном производстве, в кузнечно-прессовых цехах, в некоторых производствах по добыче и переработке сырья и др. Благодаря высокой надежности пневмопривод часто используется в тормозных системах мобильных и стационарных машин.
4. Значительно больший срок службы, чем гидро- и электропривода. Срок службы оценивают двумя показателями надежности: гамма-процентной наработкой на отказ и гамма-процентным ресурсом. Для пневматических устройств циклического действия ресурс составляет от 5 до 20 млн. циклов в зависимости от назначения и конструкции, а для устройств нециклического действия около 10-20 тыс. часов. Это в 2 - 4 раза больше, чем у гидропривода, и в 10-20 раз больше, чем у электропривода.
5. Высокое быстродействие. Здесь имеется в виду не скорость передачи сигнала (управляющего воздействия), а реализуемые скорости рабочих движений, обеспечиваемых высокими скоростями движения воздуха. Поступательное движение штока пневмоцилиндра возможно до 15 м/с и более, а частота вращения выходного вала некоторых пневмомоторов (пневмотурбин) до 100 000 об/мин. Это достоинство в полной мере реализуется в приводах циклического действия, особенно для высокопроизводительного оборудования, например в манипуляторах, прессах, машинах точечной сварки, в тормозных и фиксирующих устройствах, причем увеличение количества одновременно срабатывающих пневмоцилиндров (например в многоместных приспособлениях для зажима деталей) практически не снижает время срабатывания. Большая скорость вращательного движения используется в приводах сепараторов, центрифуг, шлифовальных машин, бормашин и др. Реализация больших скоростей в гидроприводе и электроприводе ограничивается их большей инерционностью (масса жидкости и инерция роторов) и отсутствием демпфирующего эффекта, которым обладает воздух.
6. Возможность передачи пневмоэнергии на относительно большие расстояния по магистральным трубопроводам и снабжение сжатым воздухом многих потребителей. В этом отношении пневмопривод уступает электроприводу, но значительно превосходит гидропривод, благодаря меньшим потерям напора в протяженных магистральных линиях. Электрическая энергия может передаваться по линиям электропередач на многие сотни и тысячи километров без ощутимых потерь, а расстояние передачи пневмоэнергии экономически целесообразно до нескольких десятков километров, что реализуется в пневмосистемах крупных горных и промышленных предприятий с централизованным питанием от компрессорной станции.
Известен опыт создания городской компрессорной станции в 1888 г. одним из промышленников в Париже. Она снабжала заводы и фабрики по магистралям протяженностью 48 км при давлении 0,6 МПа и имела мощность до 18500 кВт. С появлением надежных электропередач ее эксплуатация стала невыгодной.
Максимальная протяженность гидросистем составляет около 250-300 м в механизированных комплексах шахт для добычи угля, причем в них используется обычно менее вязкая водно-масляная эмульсия.
7. Отсутствие необходимости в защитных устройствах от перегрузки давлением у потребителей. Требуемый предел давления воздуха устанавливается общим предохранительным клапаном, находящимся на источниках пневмоэнергии. Пневмодвигатели могут быть полностью заторможены без опасности повреждения и находиться в этом состоянии длительное время.
8. Безопасность для обслуживающего персонала при соблюдении общих правил, исключающих механический травматизм. В гидро- и электроприводах возможно поражение электрическим током или жидкостью при нарушении изоляции или разгерметизации трубопроводов.
9. Улучшение проветривания рабочего пространства за счет отработанного воздуха. Это свойство особенно полезно в горных выработках и помещениях химических и металлообрабатывающих производств.
10. Нечувствительность к радиационному и электромагнитному излучению. В таких условиях электрогидравлические системы практически непригодны. Это достоинство широко используется в системах управления космической, военной техникой, в атомных реакторах и т.п.
Несмотря на вышеописанные достоинства, применяемость пневмопривода ограничивается в основном экономическими соображениями из-за больших потерь энергии в компрессорах и пневмодвигателях, а также других недостатков, описанных ниже.
1. Высокая стоимость пневмоэнергии. Если гидро- и электропривод имеют КПД, соответственно, около 70 % и 90 %, то КПД пневмопривода обычно 5-15 % и очень редко до 30 %. Во многих случаях КПД может быть 1 % и менее. По этой причине пневмопривод не применяется в машинах с длительным режимом работы и большой мощности, кроме условий, исключающих применение электроэнергии (например, горнодобывающие машины в шахтах, опасных по газу).
2. Относительно большой вес и габариты пневмомашин из-за низкого рабочего давления. Если удельный вес гидромашин, приходящийся на единицу мощности, в 5-10 раз меньше веса электромашин, то пневмомашины имеют примерно такой же вес и габариты, как последние.
3. Трудность обеспечения стабильной скорости движения выходного звена при переменной внешней нагрузке и его фиксации в промежуточном положении. Вместе с тем мягкие механические характеристики пневмопривода в некоторых случаях являются и его достоинством. 4. Высокий уровень шума, достигающий 95-130 дБ при отсутствии средств для его снижения. Наиболее шумными являются поршневые компрессоры и пневмодвигатели, особенно пневмомолоты и другие механизмы ударно- циклического действия. Наиболее шумные гидроприводы (к ним относятся приводы с шестеренными машинами) создают шум на уровне 85-104 дБ, а обычно уровень шума значительно ниже, примерно как у электромашин, что позволяет работать без специальных средств шумопонижения.
5. Малая скорость передачи сигнала (управляющего импульса), что приводит к запаздыванию выполнения операций. Скорость прохождения сигнала равна скорости звука и, в зависимости от давления воздуха, составляет примерно от 150 до 360 м/с. В гидроприводе и электроприводе, соответственно, около 1000 и 300 000 м/с.
Перечисленные недостатки могут быть устранены применением комбинированных пневмоэлектрических или пневмогидравлических приводов.
2.3.Электропривод
Электропривод, электрический привод, совокупность устройств для преобразования электрической энергии в механическую и регулирования потока преобразованной энергии по определённому закону. Э. является наиболее распространённым типом привода.
Историческая справка. Создание первого Э. относится к 1838, когда в России Б. С. Якоби произвел испытания электродвигателя постоянного тока с питанием от аккумуляторной батареи, который был использован для привода гребного винта судна. Однако внедрение Э в промышленность сдерживалось отсутствием надежных источников электроэнергии. Даже после создания в 1870 промышленного электромашинного генератора постоянного тока работы по внедрению Э. имели лишь частное значение и не играли заметной практической роли. Начало широкого промышленного применения Э связано с открытием явления вращающегося магнитного поля и созданием трехфазного асинхронного электродвигателя, сконструированного М. О. Доливо-Добровольским. В 90-х гг. широкое распространение на промышленных предприятиях получил Э., в котором использовался асинхронный электродвигатель с фазным ротором для сообщения движения исполнительным органам рабочих машин. В 1890 суммарная мощность электродвигателей по отношению к мощности двигателей всех типов, применяемых в промышленности, составила 5%, уже в 1927 этот показатель достиг 75%, а в 1976 приближался к 100%. Значительная доля принадлежит Э., используемому на транспорте.
Основные типы Э. По конструктивному признаку можно выделить три основных типа Э.: одиночный, групповой и многодвигательный. Одиночный Э. применяют в ручных машинах, простых металлообрабатывающих и древообрабатывающих станках и приборах бытовой техники. Групповой, или трансмиссионный, Э. в современном производстве практически не применяется. Многодвигательные Э. — приводы многооперационных металлорежущих станков, мономоторный тяговый Э. рельсовых транспортных средств. Кроме того, различают Э. реверсивные и нереверсивные (см. Реверсивный электропривод), а по возможности управления потоком преобразованной механической энергии — нерегулируемые и регулируемые (в том числе автоматизированный с программным управлением и др.)
Основные части Э. Э. всех типов содержат основные части, имеющие одинаковое назначение: исполнительную и устройства управления.
Исполнительная часть Э. состоит обычно из одного или нескольких электродвигателей (см. Двигатель электрический) и передаточного механизма — устройства для передачи механической энергии двигателя рабочему органу приводимой машины. В нерегулируемых Э. чаще всего используют электродвигатели переменного тока, подключаемые к источнику питания либо через контактор или автоматический выключатель, играющий роль защитного устройства, либо при помощи штепсельного разъёма (например, в бытовых электроприборах). Частота вращения ротора электродвигателя такого привода, а следовательно, и скорость перемещения связанного с ним рабочего механизма, изменяется только в зависимости от нагрузки исполнительного механизма. В мощных нерегулируемых Э. применяют асинхронные электродвигатели. Для ограничения пусковых токов между двигателем и источником устанавливают пусковые реакторы или автотрансформаторы, которые после разгона двигателя отключают. В регулируемых Э. чаще всего применяют электродвигатели постоянного тока, частоту вращения якорей которых можно изменять плавно, т. е. непрерывно, в широком диапазоне при помощи достаточно простых устройств управления.
В устройства управления входят: кнопочный пульт (для пуска и останова электродвигателя), контакторы, блок-контакты, преобразователи частоты и напряжения, предохранители, а также блоки защиты от перегрузок в аварийных режимах. При питании Э. от источника переменного тока, что характерно для Э., используемых в промышленности и на электроподвижном составе, двигатели которого питаются от сети переменного тока, в качестве преобразующих устройств применяют электромашинные или статические преобразователи электроэнергии — выпрямители. При питании от источника постоянного тока, что характерно для автономных электроэнергетических систем и электроподвижного состава, двигатели которого питаются от сети постоянного тока, преобразующие устройства выполняют в виде релейно-контакторных систем или статических преобразователей (см. Преобразовательная техника). В 70-е гг. 20 в. всё чаще и в регулируемых Э. стали применять трёхфазные асинхронные и синхронные двигатели, регулирование режимов работы которых осуществляют с помощью статических, в основном полупроводниковых, преобразователей частоты. Э. со статическими преобразователями энергии, выполненными на базе ртутных или полупроводниковых вентилей, называются вентильными Э. Единичная мощность вентильных Э. переменного тока, используемых, например, для шахтных мельниц, достигает 10 Мвт и более. Применение в Э. вентильных преобразовательных устройств позволяет решать наиболее экономичным образом задачу возврата энергии от электродвигателя источнику питания (см. Рекуперативное торможение).
К важным показателям, определяющим характеристики устройств управления регулируемого Э., следует отнести плавность регулирования режима работы рабочего механизма, во многом зависящую от плавности регулирования приводного электродвигателя, и быстродействие. Релейно-контакторные устройства управления при сравнительно низком быстродействии обеспечивают ступенчатое (дискретное) регулирование режимов работы, быстродействующие статические системы — непрерывное регулирование. В простейших Э. относительно небольшой мощности операции, связанные с регулированием режима работы исполнительного механизма, производят при помощи ручного управления. Недостатком ручного управления является инерционность процесса регулирования и вызываемое этим снижение производительности исполнительного механизма, а также невозможность точного воспроизведения повторяющихся производственных процессов (например, при частых пусках). Регулирование режимов работы исполнительных механизмов Э. обычно осуществляют при помощи устройств автоматического управления. Такой Э., называется автоматизированным, широко используется в системах автоматического управления (САУ). В разомкнутых САУ изменение возмущающего воздействия (например, нагрузки на валу электродвигателя) вызывает изменение заданного режима работы Э. В замкнутых САУ благодаря связи между входом и выходом системы во всех режимах работы автоматически поддерживаются заданные характеристики, которые при этом можно и регулировать по определенному закону. В таких системах находят все более широкое применение ЭВМ. Одной из разновидностей автоматизированного Э. является следящий электропривод, в котором исполнительный орган с определённой точностью воспроизводит движения рабочего механизма, задаваемые управляющим органом. По способу действия различают следящие Э. с релейным, или дискретным, управлением и с непрерывным управлением. Следящие Э. характеризуются мощностями от нескольких вт до десятков и сотен квт, применяются в различных промышленных установках, военной технике и др. В 60-е гг. 20 в. в различных областях техники нашли применение Э. с числовым программным управлением (ЧПУ). Такой Э. используют в многооперационных металлорежущих станках, автоматических и полуавтоматических линиях. Создание автоматизированного Э. для обслуживания отдельных технологических операций и процессов — основа комплексной автоматизации производства. Для решения этой задачи необходимо совершенствование Э. как в направлении расширения диапазона мощностей Э. и возможностей регулирования, так и в направлении повышения надёжности и создания Э. с оптимальными габаритами и массой.
3.Трансмиссия
(от лат. transmissio - передача, переход), устройство для передачи механической энергии от двигателя к исполнительным органам машины либо к другим рабочим машинам (станкам, мельницам и т.п.). Передача вращения от Т. (трансмиссионного вала) к рабочим машинам обычно производится приводными ремнями (контрпривод). В современной технике под Т. понимается вся совокупность передаточных устройств от вала двигателя до рабочих органов машины, на которой он установлен. Так, в автомобиле или тракторе в состав механической Т. входят силовая передача, сцепление, карданная передача, дифференциальный механизм и др. устройства. На тепловозах, судах, грузовых автомобилях, тракторах используются также гидромеханические (гидротрансформатор и механическая коробка передач), гидрообъёмные (гидронасос с гидромоторами) и электромеханические (генератор и электродвигатели) Т.
3.1.Силовая передача
Силовая передача, устройство для передачи механической энергии, обычно с преобразованием сил, моментов и скоростей, а в некоторых случаях — характера движения. С. п. в приводах машин позволяет согласовать режимы работы двигателя и исполнительных органов машины, приводить в движение несколько механизмов от одного двигателя, осуществлять реверсирование движения, изменять вращающие моменты и частоты вращения при сохранении постоянного момента и частоты вращения двигателя, преобразовывать вращательное движение в поступательное, винтовое и др. Наибольшее распространение в машиностроении получили механические С. п. с твёрдыми звеньями, нередко используются также гидравлические (см. Гидропривод машин), пневматические и другие С. п. Иногда в одной машине для привода различных механизмов могут одновременно применяться С. п. разных типов или их комбинации (например, гидромеханические С. п.). Экономическая целесообразность использования в машинах быстроходных двигателей (в связи с их меньшими габаритом, массой и стоимостью) определяет преимущественное распространение силовых передач, понижающих частоту вращения ведомого вала по сравнению с ведущим. Наибольшую мощность можно передать с помощью зубчатых С. п. (известны, например, редукторы к судовым турбинам мощностью свыше 50 Мвт). Мощность червячных С. п. Ограничена (обычно 200 квт) недостаточно высоким кпд и нагревом. Цепные С. п. могут передавать мощность до 4 Мвт, фрикционные С. п. — до 300, ремённые С. п. — до 1,5 Мвт. Механические С. п. компактны, удобны для компоновки машин, обладают высокой надёжностью, позволяют относительно просто осуществлять необходимые преобразования движения и практически любые передаточные отношения; при надлежащем качестве изготовления большинство С. п. имеет высокий кпд.
3.2.Сцепление
Сцепление, сцепная муфта, механизм транспортных машин для передачи крутящего момента от двигателя внутреннего сгорания к коробке передач. С. обеспечивает кратковременное разъединение вала двигателя и вала трансмиссии, безударное переключение передач и плавное трогание машины с места. В зависимости от числа ведомых дисков различают одно-, двух- и многодисковые С. Устанавливаемые в автомобилях С. обычно представляют собой одно- или двухдисковую муфту, диски которой сжаты пружинами. Для обеспечения мягкости включения С. и уменьшения крутильных колебаний трансмиссии между фрикционными накладками дисков часто устанавливают плоские пружины, а крепление дисков к их ступицам производят через упругую муфту с витыми пружинами (см. Демпфер) и т. п. Выключение С. осуществляется педалью через рычажную или гидравлическую передачу, а в тяжёлых машинах с помощью сервопривода (см. Исполнительный механизм). Выключение может быть автоматическим при переключении передач. В качестве С. используют также многодисковые масляные муфты (в мотоциклах), нормально разомкнутые (в тракторах), гидродинамические или гидродинамические в сочетании с фрикционными (в автомобилях), а иногда электромагнитные муфты с ферромагнитной смесью (обычно в автомобилях для инвалидов).
3.3.Карданная передача
Карданная передача автомобиля (от имени Дж. Кардано), устройство для передачи вращения от ведущего вала к ведомому, расположенных под углом один к другому. Часто в процессе работы угол и расстояние между валами непрерывно изменяются. В автомобилях К. п. (рис. 1) применяются для соединения двигателя и коробки передач (угол до 5°), коробки передач с раздаточной коробкой (угол до 5°), коробки передач (раздаточной коробки) с главной передачей (угол до 15°), а также в др. случаях (в рулевом приводе, для привода лебёдок и т. и.). К. п. включает карданный вал с двумя (реже одним) карданами. Если карданным валом соединяются механизмы, угол и расстояние между которыми изменяются (например, коробка передач и главная передача автомобиля), предусматривается осевая компенсация в виде скользящего шлицевого соединения, допускающего изменение длины вала в заданных пределах. В зависимости от величины угла между валами в К. п. могут быть использованы полукарданы (жёсткие или упругие), полные карданы неравных угловых скоростей или карданы равных угловых скоростей. Наиболее распространены полные карданы (рис. 2), основными деталями которых являются две вилки, игольчатые подшипники, крестовина, опоры для цапф крестовины и уплотняющие устройства. Кпд одного кардана — 0,985—0,99.
3.4.Дифференциальный механизм
Дифференциальный механизм, устройство, позволяющее получать результирующее движение как сумму или разность составляющих движений. В Д. м. с одной степенью свободы составляющие движения кинематически связаны и осуществляются одним приводом, а результирующее получается как разность этих движений. Д. м. с одной степенью свободы применяют для получения малых точных перемещений или больших сил (например, в приборах, металлорежущих станках и т.п.).
В Д. м. с двумя и более степенями свободы составляющие движения независимы и выполняются каждое своим звеном. Известны разные типы таких Д. м., но наибольшее распространение получил Д. м. с коническими зубчатыми колёсами (обычно называемый просто дифференциалом), применяемый в автомобилях и др. транспортных машинах, механических приводах и т.п. Зависимость между действительными скоростями звеньев Д. м. выражается формулой w1 + w2 = 2wB или n1 + n2 = 2nB, где w1, w2, wB и n1, n2 и nB соответственно угловые скорости и частоты вращения центральных колёс и водила. В вариаторе, работающем по замкнутой схеме, Д. м. позволяет расширить диапазон регулирования и осуществить реверсивное вращение выходного вала. В металлорежущих станках Д. м. применяется с целью упрощения настройки и уменьшения числа необходимых для этого сменных зубчатых колёс. В счётно-решающих машинах Д. м. используется для выполнения математической операции сложения параметров.
Список литературы.
1. Лит.: Чиликин М. Г., Общий курс электропривода, 5 изд., М., 1971; Авен О. И., Доманицкий С. М., Бесконтактные исполнительные устройства промышленной автоматики, М. — Л., 1960; Электропривод систем управления летательных аппаратов. М., 1973; Основы автоматизированного электропривода, М., 1974. Ю. М. Иньков.
2. Лит.: Решетов Д. Н., Передачи в машинах, М., 1953; Кудрявцев В. Н., Выбор типов передач, М. — Л., 1955; Проектирование механических передач, 3 изд., М., 1967; Детали машин. Расчет и конструирование. Справочник, под ред. Н. С. Ачеркана, 3 изд., т. 3, М., 1969. А. А. Пархоменко.
3. Лит.: Хельдт П. М., Автомобильные сцепления и коробки передач, пер. с англ., М., 1960; Борисов С. Г., Эглит И. М., Муфты сцепления тракторов, М., 1972. Н. Я. Ниберг, И. М. Эглит.
4. Лит.: Малаховский Я. Э., Лапин А. А., Веденеев Н. К., Карданные передачи, М., 1962. М. И. Лурье. Н. Я. Ниберг.
Похожие работы

... материалов, деталей и конструкций, предприятий по эксплуатации и ремонту строительных машин и транспорта, стационарные и пере-движные производственные, энергетическое и складское хозяйство строительных организаций, научно-исследовательские, проектные, учебные и другие учреждения и хозяйства, обслуживающие строительство. В более широкой трактовке материальной базой строительства является сово- ...



... , в том числе скважин для изготовления буронабивных свай. Рыхлители служат для рыхления мерзлых грунтов и пород, которые не могут разрабатываться обычными машинами для земляных работ, экскаваторами, бульдозерами, скреперами. Одноковшовые строительные экскаваторы могут разрабатывать грунты с удельным сопротивлением копанию k1=0,5МПа, а многоковшовые с k1=0,8МПа. Бульдозеры и скреперы могут ...
... машин (стационарные и полевые условия) и определение общей годовой производственной программы предприятия. 4.10 Выбор формы организации и метода проведения работ по ТО и Р строительных машин. Выбираем для медницко-радиаторного отделения централизованную форму выполнения работ. Централизованная форма тех. обслуживания заключается в том, что все технологические операции технического обслуживания и ...
... грунта из ковша). Рис. 3. Схема работы обратной лопаты Многоковшовые экскаваторы. Многоковшовые экскаваторы представляют собой землеройные машины, имеющие в качестве рабочего органа многоковшовую цепь или роторное колесо с ковшами, жестко закрепленными по периметру. Они применяются: на дорожно-строительных работах; при рытье котлованов, каналов и траншей для укладки труб или для оснований ...
0 комментариев