РГРТУ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОЙ РАБОТЕ
ПО ДИСЦИПЛИНЕ:
"Теоретические основы радиоэлектронной борьбы""
Студент Косс С. В.
Группа 310 Специальность 210305
2007
Содержание
Введение
Анализ и формализация задачи
Расчет параметров средств помехозащиты
Расчет параметров помехопостановщика
Расчет зон прикрытия помехами
Анализ эффективности применения комплекса помех и средств помехозащиты
Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон
Выбор и технико-экономическое обоснование технологической базы для реализации проекта
Составление структурной схемы устройства
Заключение
Список использованных источников
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ РОССИЙСКОЙ ФЕДЕРАЦИИ
РЯЗАНСКИЙ ГОСУДАРСТВЕННЫЙ РАДИОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА РАДИОТЕХНИЧЕСКИХ СИСТЕМ
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
по дисциплине "Теоретические основы радиоэлектронной борьбы"
Студент _________Косс С.В. _________________код________ группа_310_
1. Тема: "Средства радиоэлектронной защиты и подавления радиоэлектронных средств (РЭС)"
2. Срок представления курсовой работы к защите " 10 " мая 2007 г.
3. Исходные данные для проектирования:
а) Исходные данные к курсовой работе:
Тип РЛС: вертолетная РЛС.
Параметры РЛС: дальность обнаружения цели не менее 30 км;
Определяемые координаты цели: скорость, азимут.
Параметры цели: ЭПР цели Е=5 м2, максимальная скорость цели V=900 м/с;
Виды применяемых помех: уводящая по скорости, пассивная от земной поверхности.
б) Требования к проекту:
Разработать алгоритмы, структурные схемы постановщика помех и средств помехозащиты радиолокационной станции, провести анализ эффективности применения средств помехопостановки и помехозащиты.
4. Обязательные разделы пояснительной записки курсовой работы
Титульный лист.
Задание на курсовую работу.
Содержание.
Введение.
Анализ задачи и ее формализация.
Расчет параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех).
Расчет параметров средств помехозащиты (алгоритма помехозащиты структуры и параметров).
Анализ эффективности применения комплекса помех и средств помехозащиты.
Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон.
Выбор и технико-экономическое обоснование технологической базы для реализации проекта.
Составление структурной схемы устройства и описание ее работы
Заключение
Список использованных источников
Графические материалы (1 л.)
Руководитель работы В.И. Кошелев
Задание принял к исполнению студент:______________
Введение
В современном вооруженном конфликте в полной мере используются всевозможные радиоэлектронные средства (РЭС), которые часто играют решающую роль. Поэтому каждой из конфликтующих сторон к РЭС предъявляются все более высокие требования, часто противоречащие друг другу. Именно поэтому разработка и создание РЭС является очень сложной задачей, которую можно решать только с применением самых современных подходов.
В данном курсовом проекте будет рассмотрена разработка средств радиоэлектронной защиты и подавления РЭС, т.е. будет рассмотрен вопрос создания РЭС с обоих конфликтующих сторон.
Анализ и формализация задачи
Задачи обеспечения помехопостановки и помехозащиты являются взаимосвязанными и присущи всем противоборствующим сторонами, каждая из которых, с одной стороны, пытается сорвать с помощью помех нормальную работу противника, а с другой стороны, стремится обеспечить хорошую помехоустойчивость своих РЭС, то есть обеспечить подавление активных (АП) и пассивных помех (ПП), применяемых противоборствующей стороной.
Согласно ТЗ необходимо спроектировать вертолетную РЛС с дальностью обнаружения не менее 30км, с возможностью определения азимута и скорости целей с ЭПР не менее 5м2 и скоростью не более 900м/с.
Курсовая работа включает в себя следующие пункты:
· расчет параметров бортовой РЛС (БРЛС), обеспечивающих требования ТЗ;
· расчет параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех);
· Расчет средств помехозащиты (алгоритма помехозащиты, структуры и параметров)
· расчет зон прикрытия помехами;
· анализ эффективности применения помех и средств помехозащиты;
· оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон;
· составление структурной схемы устройства и описание ее работы;
Согласно ТЗ при расчете необходимо учесть пассивные помехи - отражения от подстилающей поверхности, Т.о. нужно предварительно подсчитать значения ЭПР помехи в м2. В качестве активной помехи в Т.З. определена помеха, уводящая по скорости. Требуется в ходе работы определить необходимую мощность помехопостановщика и выбрать структурную схему, позволяющую реализовать данную помеху. С другой стороны, требуется обеспечить нормальную работу БРЛС в условии действия помех. По окончании расчетов сделаем вывод об эффективности работы помехопостановщика и помехозащиты.
Современные БРЛС являются сложными информационными системами. Сложность БРЛС определяется ее способностью решать одну и ту же задачу различными способами с использованием различных алгоритмов обработки сигналов.
В общем случае БРЛС предназначена для информационного обеспечения процедур наведения и защиты летательных аппаратов и управления их средствами поражения. Вертолетная РЛС также должна обеспечивать пилота информацией о возможных препятствиях (различные местные предметы а также элементы рельефа земной поверхности). Для решения этих задач необходимо иметь разветвленную сеть режимов работы. К этим режимам, прежде всего, относятся:
o поиск и обнаружение воздушных и наземных целей с определением их государственной принадлежности;
o сопровождение целей, при котором формируются оценки фазовых координат, необходимые для информационного обеспечения всех используемых методов наведения и уклонения от средств поражения;
o идентификация (распознавание) целей вплоть до их типа с ранжированием по степени важности (опасности);
o выдача команд целеуказания средствам поражения и формирование для них команд радиокоррекции;
o точное определение расположения препятствий на пути следования вертолета.
Расчет параметров РЛС
радиоэлектронный защита помеха
Расчет будем производить с помощью программы "Стрела". В окне параметров системы на пяти закладках даны параметры РЛС, которые можно изменять.
В закладке "РЛС" (рис.1) укажем в качестве "Основного режима работы" - импульсно-доплеровский. Такой выбор связан с тем, что импульсно-доплеровские БРЛС по сравнению с импульсными станциями с режимом СДЦ обладают существенно лучшими характеристиками по обнаружению цели на встречных курсах на фоне земли. Закладка "По назначению" - бортовая РЛС. "Скорость носителя РЛС, м/с" - 100 м/с (360км/ч, что соответствует крейсерской скорости современного боевого вертолета). "Однозначно измеряемая скорость, м/с" - 900 м/с (соответствует ТЗ). "Тип обработки" - режекция и когерентное накопление.
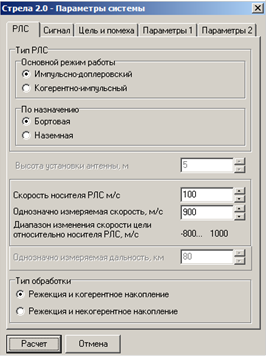
Рис.1
В закладке "Сигнал" (рис.2), укажем в качестве "Типа сигнала" - сложный. "Длина волны, см" - 3 см, такой выбор связан с тем, что близко с этим значением расположено окно прозрачности (3,3 см), что позволяет сигналу распространяться с малым затуханием в пространстве.

Рис.2
Далее необходимо рассчитать ЭПР помехи от подстилающей поверхности. Существует множество способов учета отражений от подстилающей поверхности. Для решение таких задач в режиме квазинепрерывного импульса (КНИ) посредством выбора частот повторения зондирующих импульсов выделяется для частотного спектра отраженного сигнала подвижной цели поддиапазон доплеровских частот, свободный от отражений подстилающей поверхности. Фактически создаются условия обнаружения цели на фоне собственных шумов приемника БРЛС.
Импульсно-доплеровские РЛС используют метод станций, работающих на непрерывном излучении. Спектр доплеровского сигнала, отраженного от поверхности земли с летящего объекта, представлен на рис.3 На нем значению мощности сигнала S (Fд) в области доплеровской частоты Fд = 0 соответствуют высотные отражения от точек подстилающей поверхности вблизи нормали, которая проведена с самолета на землю. Области частот Fдгл соответствуют отражению по оси луча антенны РЛС, скользящего по поверхности земли со скоростью перемещения самолета в горизонтальной плоскости.
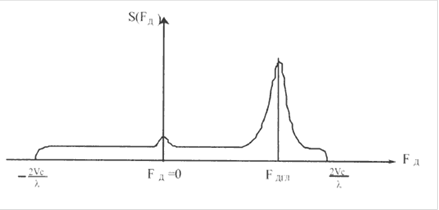
Рис.3
Применим импульсно-доплеровский метод с высокой частотой повторения (ВЧП) излучения зондирующих импульсов. Этот метод заключается в том, что выбирается частота повторения импульсов Fп большая, чем максимальная доплеровская частота цели. Периодически излучаемые зондирующие когерентные импульсы можно рассматривать как сумму гармонических составляющих с частотами fk = f0 + kFп, где f0 - несущая частота РЛС, a k - любое целое число. Каждая составляющая с частотой fk подобна непрерывному зондирующему сигналу, максимальное и минимальное доплеровское приращение частоты сигналов, отраженных от подстилающей поверхности, образуется как 2Vc/Ak и - 2Vc/Аk соответственно, где Аk = c/fk, а с - скорость распространения радиоволн. При этом, значение мощности доплеровского сигнала отражения от земли по каждой составляющей модулируется в соответствии с огибающей спектра зондирующих импульсов Sт. В результате этого спектр отраженного от земли доплеровского сигнала имеет вид, показанный на рис.4.
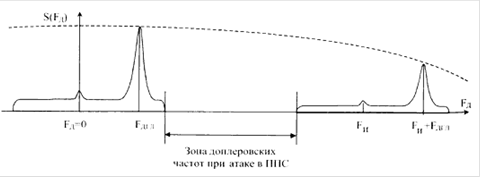
Рис.4
Для малых по сравнению с длиной волны и пологих неровностей применим метод возмущений (мелкомасштабная модель). Отраженная волна представляется в виде суммы волн от гладкой поверхности, определяемой коэффициентами отражения Френеля и обусловленной мелкими неровностями. Если радиус кривизны неровностей много больше длины волны (для плавных неровностей достаточно больших размеров), применим метод Кирхгофа (крупномасштабная модель). При этом отраженное поле вычисляется по законам геометрической оптики, т.е. так же, как при отражении от бесконечной касательной плоскости в данной точке поверхности. С учетом того, что в этой модели затенение одних участков поверхности другими отсутствует, можно воспользоваться коэффициентами отражения Френеля. При оценке участка гладкой поверхности, эффективно участвующего в формировании отраженного сигнала в сторону РЛС, можно воспользоваться зонами Френеля. Рассмотрим случай вертикального облучения земной поверхности. Метод построения зон ясен из рис.5.
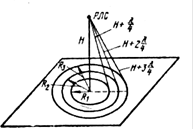
Рис.5
Для первой зоны разность хода лучей до центра зоны и до любой точки внутри зоны не превышает λ/4, что после отражения на границе зоны соответствует разности хода λ/2, т.е. фазовому сдвигу 180°. Остальные зоны строятся аналогично. Отсюда следует, что первая зона является кругом с радиусом:
![]()
так как обычно H >> λ/4, где H - высота БРЛС над землей.
Что касается остальных зон, то они образуют кольца. Вторая зона имеет внутренний радиус R1 и внешний:
![]()
последующие радиусы равны:
![]()
![]()
и т.д. Так как площадь k-го кольца:
![]()
т.е. площади колец зон равны. Вследствие того, что сигналы, отраженные от этих зон, имеют разные знаки, происходит их взаимная частичная компенсация и результирующий отраженный сигнал соответствует приблизительно половине формируемого первой зоной Френеля, что и определяет главную роль этой зоны.
Приближенный расчет для высоты полета вертолета-носителя БРЛС равной 100м показывает, что ЭПР помехи от подстилающей поверхности составляет 18м2 при приеме помехи по боковым каналам.
Заполним закладку "Цель и помеха" (рис.6). "ЭПР цели кв. м" - 5 м (в соответствии с ТЗ). "Максимальная скорость цели, м/с" - 900 м/с (в соответствии с ТЗ). "ЭПР помехи" - 18 м2. "Ширина спектра флюктуаций, Гц" - 10000 Гц.
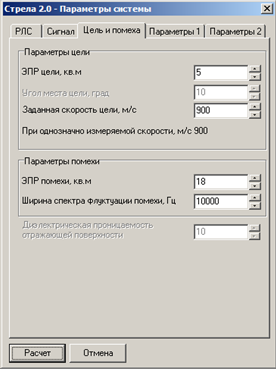
Рис.6
В закладке "Параметры 1" (рис.7) укажем "Мощность передатчика, кВт" - 5кВт, "Коэффициент усиления антенны" - 900, "Энергетическая дальность, км" - 30, "Разрешение по дальности, м" - 50, "Вероятность правильного обнаружения" - 0,95, "Вероятность ложной тревоги" - 10-5, "Потери при обработке, дБ" - 3.
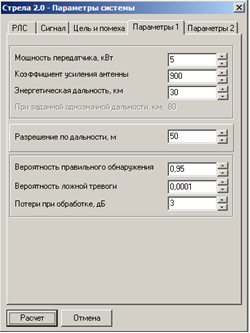
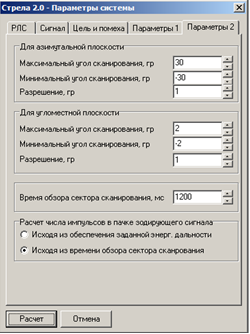
Рис.7
В закладке "Параметры 2" (рис.7) укажем для азимутальной плоскости: "Максимальный угол сканирования, гр." - 30, "Минимальный угол сканирования, гр." - (-30), "Разрешение, гр" - 1; для угломестной плоскости: "Максимальный угол сканирования, гр." - 2, "Минимальный угол сканирования, гр." - (-2), "Разрешение, гр" - 1; "Время обзора сектора сканирования, мс" - 1200 мс. Расчет числа импульсов в пачке зондирующего сигнала вести, исходя из времени обзора сектора сканирования.
Далее программа выдает расчет параметров РЛС, используя введенные ранее данные (рис.8)
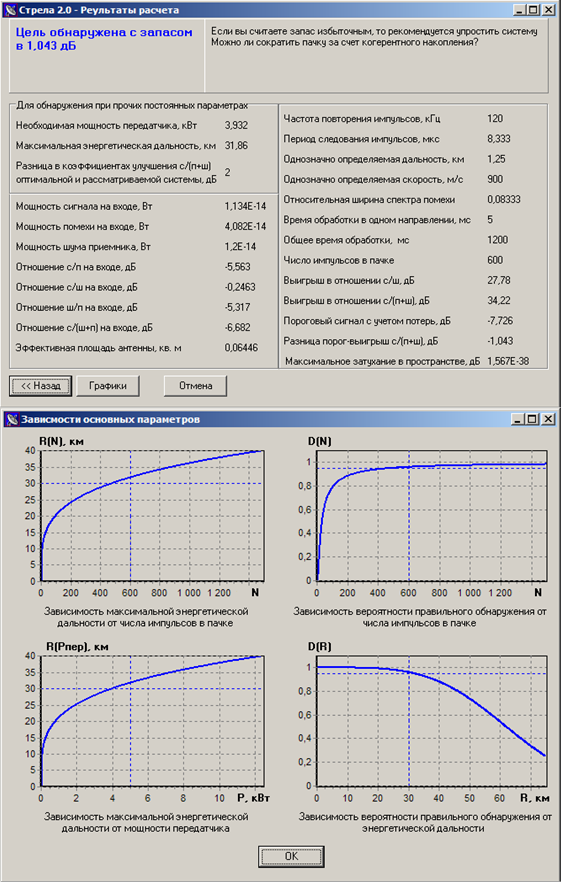
Рис.8
Из данных расчета программы "Стрела" можно видеть следующее:
o увеличение числа импульсов в пачке приводит к большему значению энергетической дальности, что можно объяснить непосредственной связью числа импульсов в пачке N с коэффициентом передачи сигнала kс (kс= N), который в свою очередь связан с энергетической дальностью R, причем чем больше kс, тем больше R;
o увеличение N приводит к повышению вероятности правильного обнаружения D, что согласуется с теорией;
o дальность связана с мощностью передатчика основным уравнением дальности радиолокации, согласно которому увеличение мощности приводит к возрастанию энергетической дальности;
o увеличение энергетической дальности приводит к уменьшению значения правильного обнаружения, связанно данное явление с тем, что на больших дальностях уменьшается мощность отраженного от цели зондирующего импульса, уменьшается разрешающая способность РЛС, больше сказывается совокупное влияние среды на распространяющуюся волну.
Расчет параметров средств помехозащиты
Отраженный сигнал от цели представляет пачку радиоимпульсов с неизвестной доплеровской частотой, которая подвергается когерентной обработке. Чтобы учесть доплеровский сдвиг частоты, широко используются гребенчатые фильтры, представляющие набор узкополосных фильтров, осуществляющих когерентное накопление.
Ожидаемую пачку импульсов (копию сигнала) u (t) можно представить в виде произведения двух колебаний: последовательности видеоимпульсов u1 (t) и высокочастотного колебания u2 (t) несущей частоты f0, модулированного огибающей пачки, т.е.
u (t) = u1 (t) u2 (t),
которое соответствует ожидаемому сигналу. Если аддитивную смесь сигнала с шумом на входе приемника обозначить y (t), то отклик согласованного фильтра даёт на выходе корреляционный интеграл R:
Откуда вытекает следующий оптимальный алгоритм обработки пачки радиоимпульсов: принимаемая реализация колебаний y (t) стробируется. При этом получается колебание u (t) =u1 (t) u2 (t). Стробирование необходимо осуществлять в соответствии со временем запаздывания сигналов. При неизвестном времени запаздывания необходима многоканальная схема. Каждый временной канал относительно соседнего стробируется импульсной последовательностью, задержанной на длительность одного импульса пачки τи. Тогда число временных каналов m в одном периоде повторения Т определяется m=T/τи и соответствует величине скважности. В каждом канале дальности необходимо осуществить накопление сигналов пачки, т.е. вычислить интеграл. Интегрирование осуществляется узкополосным фильтром.
При неизвестной доплеровской частоте цели в каждом стробируемом канале число доплеровских фильтров должно быть таково, чтобы перекрывать весь диапазон доплеровских частот, который в импульсных системах, благодаря периодичности спектра, можно принять равным Fп.
Таким образом, согласованный фильтр обработки имеет структуру, представленную на рис.9.
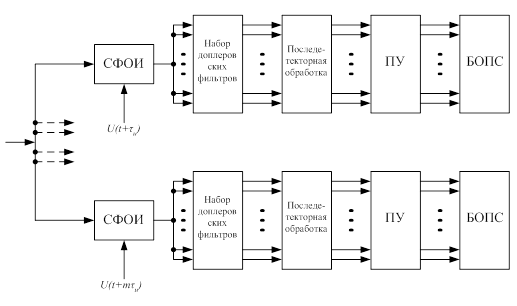
Рис.9
Согласованные фильтры одиночного радиоимпульса (СФОИ) стробируются по дальности с числом временных сигналов m. В каждом канале ставятся узкополосные доплеровские фильтры, перекрывающие доплеровский диапазон целей, где производится накопление сигнала. Детектирование огибающей сигнала осуществляется в блоке последетекторной обработки, на выходе которого в пороговом устройстве (ПУ) происходит сравнение с пороговым уровнем с целью обнаружения сигнала. В блоке определения параметров сигнала (БОПС) определяются параметры цели, такие как скорость, дальность и т.д.
При обнаружении цели определяется доплеровская частота цели по номеру доплеровского фильтра и рассчитывается скорость цели:
![]()
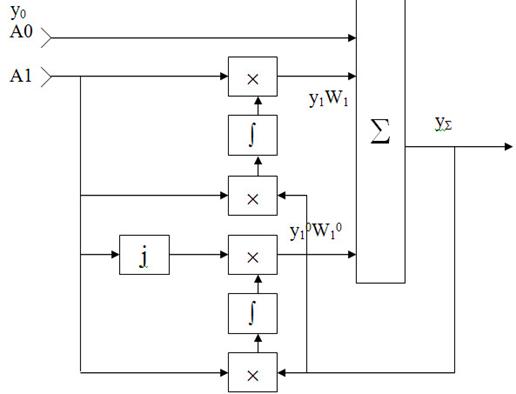
На практике вместо СФОИ лучше использовать усилитель промежуточной частоты (УПЧ), параметры которого согласованны с параметрами сигнала, а узкополосные доплеровские фильтры выполнить в виде блока цифровой обработки, включающего память на всю пачку и обработку на основе быстрого преобразования Фурье (БПФ). Тогда согласованный фильтр имеет структуру, представленную на рис.10.
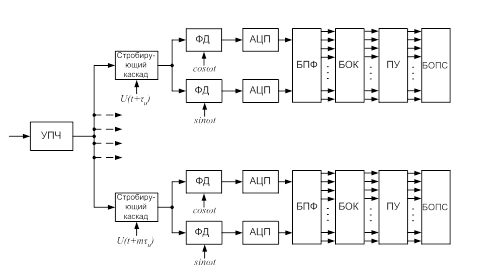
Рис.10
Стробирование по дальности выполняется в стробирующих каскадах, подключенных к выходу УПЧ, на которые подаются временные стробы длительностью τи. Количество стробирующих каскадов равно m.
Обработка по частоте Доплера в каждом временном канале производится на видеочастоте, в двух квадратурных каналах, где с помощью фазовых детекторов (ФД) извлекается полезная информация из фазы сигнала. Для цифровой обработки необходимо информацию с выхода ФД преобразовать в цифровые коды, что выполняется с помощью аналого-цифровых преобразователей (АЦП).
Блок, обозначенный как БПФ, включает память на всю пачку отраженных импульсов и обработку в виде БПФ.
На выходе БПФ образуется n частотных каналов, где n - число импульсов в пачке, отраженной от цели. Полоса пропускания каждого доплеровского фильтра в этом случае будет:
![]()
В БПФ производится когерентное накопление сигнала y (t). Объединение квадратурных каналов производится в блоке объединения квадратур (БОК), причем объединение производится для каждого частотного канала. Обнаружение полезного сигнала происходит на выходах многоканального (n каналов) порогового устройства (ПУ). Дальнейшая обработка в виде фиксации обнаружения и измерения параметров цели производится в блоке определения параметров сигнала (БОПС).
Величина порогового сигнала q на выходе когерентного накопителя:
![]()
где qвх - отношение напряжения полезного сигнала (uсвх) к среднеквадратическому значению шума (σшвх) на входе устройства обработки. Структура фильтра, представленного на рис.23, реально в цифровом виде выполняется на одном АЦП и спецпроцессоре с одним БПФ. Многоканальность по времени реализуется за счет разбиения по временным тактам работы АЦП и БПФ. На рис.11 приведены спектры соседних гармоник, отраженных от пассивных помех, от цели и с учетом частотной характеристики согласованного фильтра, выполненного в виде многоканального доплеровского фильтра, показанного на рис.10.
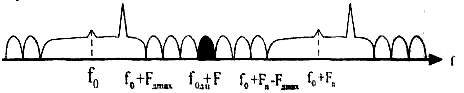
Рис.11
Аналогичный спектр на рис.12 представлен при выполнении многоканального доплеровского фильтра в виде БПФ, структурная схема которого показана на рис.23.

Рис.12
Особенность обработки, показанной на рис.11, состоит в том, что доплеровские фильтры расположены в зоне спектра, свободного от пассивной помехи. При изменении скорости носителя РЛС меняется положение точек f0±Fдmах, что приводит к изменению зоны спектра, свободного от пассивных помех. В этом случае для перекрытия всей зоны спектра, где может находиться полезный сигнал, следует производить адаптивную привязку начала гребенки доплеровских фильтров к скорости носителя РЛС (к точке f0±Fдmах).
В случае использования БПФ (рис.12) по ширине спектра пассивных помех Fдmах рассчитывают количество частотных каналов БПФ, в которых находится помеха, и эти каналы в обнаружении полезного сигнала не участвуют. Из всего анализа можно сделать вывод, что схема рис.10 хоть и сложнее схемы рис.9, но обеспечивает лучшие результаты, так как учитывает изменение скорости носителя РЛС, поэтому будет использована именно эта схема.
В техническом задании также указана активная помеха (АП) - уводящая по скорости. Такой тип помех используется для обеспечения срыва автосопровождения цели по координатам (дальности, скорости). В отличие от помех типа ложная цель, уводящие помехи динамически изменяют свои параметры, т.е. принимая сигнал от РЛС, они преднамеренно изменяют в нем какой-либо параметр (вносят дополнительную задержку, изменяют фазу и др.), после чего переизлучают его в направлении станции, тем самым, обеспечивается автозахват ложной цели и ее сопровождение. Бороться с такой помехой можно, с помощью пороговых алгоритмов.
Дальностный пороговый алгоритм:
Скоростной пороговый алгоритм:
![]()
Поровый алгоритм по ускорению:
![]()
Если неравенства выполняются, то параметры дальности R, скорости vr и ускорения a согласованы и идет сопровождение цели. Если не выполняются, то принимается решение о наличии уводящей помехи. В нашем случае зная, что скорость есть первая производная от дальности, сравнивая оценку с вычисленной скоростью можно сделать вывод о наличии или отсутствии помехи.
![]() , где
, где
![]() .
.
Рассмотрим алгоритм создания уводящей по скорости помехи для БРЛС с автосопровождением по скорости (АСС):
1) радиолокационный сигнал (импульсный или непрерывный) принимается, усиливается и ретранслируется в направлении подавляемой БРЛС;
2) мощный ретранслированный сигнал из-за действия АРУ вызывает уменьшение коэффициента усиления радиолокационного приемника, вследствие чего отраженный от цели сигнал подавляется, и строб скорости БРЛС захватывается сигналом помехи;
3) доплеровская частота переизлученного сигнала помехи последовательно меняется (уводится) в сторону увеличения или уменьшения относительно доплеровской частоты сигнала, отраженного от реальной цели. При этом возможны различные законы изменения частоты, но если производится одновременно увод по дальности, то производная функция изменения дальности должна быть равна во всех соответствующих точках значению функции уводящей помехи по скорости;
4) по достижении максимальной величины увода по скорости передатчик ретрансляционных помех выключается, вызывая срыв сопровождения цели. Отношение уровней сигналов при включенном и выключенном ретрансляторе должно быть таким, чтобы не позволить ГСН наводиться на собственные шумы, излучаемые передатчиком помех;
5) БРЛС переходит в режим перезахвата и начинает процесс поиска доплеровской частоты сигнала цели. При этом через некоторое время возможен либо повторный захват потерянного сигнала, либо захват сигналов от других целей, включая ложные. Во время поиска угломерная система размыкается или находится в режиме памяти по углам или угловой скорости;
6) процесс увода по скорости повторяется. Маневр самолета с максимальным ускорением повышает эффективность воздействия уводящей помехи по скорости.
Описанная последовательность создания уводящей по скорости помехи относится к обычному способу ее формирования. На рис.13 приведена структурная схема широко используемого передатчика уводящей по скорости помехи на основе ретранслятора со сдвигом частоты на ЛБВ. Для разделения принятого сигнала и сигнала помехи используется циркулятор, но он не обеспечивает достаточной развязки для устранения самовозбуждения. Поэтому принятый и выходной сигналы помехи попеременно стробируются таким образом, чтобы исключить одновременную передачу и прием. Хотя радиолокационный приемник будет принимать ретрансляционный сигнал помехи в течение менее чем 50% времени, эффективное воздействие помехи все же будет обеспечено. Так как стробированный высокочастотный сигнал должен накапливаться для последующей передачи, то необходимо использовать в тракте линию задержки.
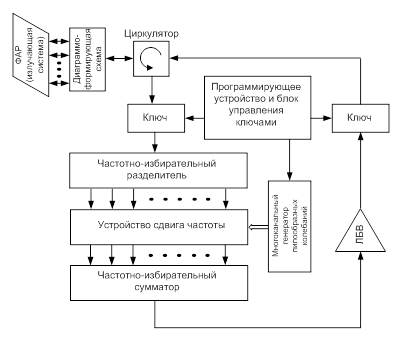
Рис.13
Задержка сигналов должна быть когерентной и достаточной величины, что может потребовать применения преобразования частоты входных сигналов в диапазон промежуточных частот для реализации требуемой задержки. Можно обойтись без введения дополнительной задержки, а использовать запаздывание в ЛБВ и тракте. Пилообразное колебание, управляемое по частоте, подается на спираль ЛБВ с амплитудой, достаточной для получения в ретранслируемом радиолокационном сигнале изменения фазы на 2π рад. Для успешной работы передатчика такая установка амплитуды пилообразного колебания оказывается допустимой в 20 % -ной частотной полосе. Однако подавление остатка сигнала на несущей частоте радиолокационного сигнала должно быть тщательно проверено, так как если уровень сигнала на выходе ЛБВ на несущей частоте входного сигнала оказывается больше уровня радиолокационного сигнала, отраженного от цели, то передатчик помех будет действовать как маяк. Если сигнал помехи превышает остаток на несущей частоте сигнала на 6 дБ или больше, то строб скорости РЛС будет захватываться и уводиться помехой. Обычно коэффициент подавления в диапазоне частот лежит в пределах 10.20 дБ.
В системе сдвига частоты всегда существует начальная (не нулевая) доплеровская частота. В лучшем случае эта начальная частота достигает 20Гц. Для практики важно, чтобы эта начальная частота составляла не более 25% величины разрешающей способности РЛС по скорости. Время действия сигнала помехи на несущей частоте необходимо лишь для того, чтобы воздействовать на систему АРУ подавляемого радиолокационного приемника, и оно обычно составляет доли секунды. Закон изменения частоты обычно линейный, но также возможен параболический или модифицированный экспоненциальный закон. Имитируемое помехой ускорение не должно быть значительным, поскольку РЛС может автоматически сбросить сигнал уводящей по скорости помехи, используя пороговый алгоритм по ускорению, описанный выше. При уводе по скорости изменение на 20 кГц за 5 с соответствует примерно ускорению примерно 5g. После окончания цикла постановки уводящей по скорости помехи передатчик кратковременно выключается, а затем цикл постановки помехи повторяется. Если радиолокационный сигнал после действия уводящей по скорости помехи больше не принимается, то уводящая помеха по скорости может не создаваться до тех пор, пока не появится другой радиолокационный сигнал.
Может также использоваться последовательное соединение, когда данный входной сигнал сдвигается по частоте более чем один раз. Выходные сигналы всех каналов суммируются, усиливаются и излучаются в направлении подавляемого радиолокатора. Возможны девять основных вариантов программ создания помех по скорости, однако, когда они видоизменяются и используются в комбинации, число режимов становится еще большим:
1) программа представляет собой обычную уводящую помеху по скорости, когда увод может совершаться либо вверх, либо вниз по частоте.
2) эта программа является вариантом программы 1), когда максимальная величина увода по скорости сохраняется сравнительно длительное время.
3) множество подпрограмм уводящей помехи по скорости, создаваемых на основе временного разделения, используя для этого только одно устройство сдвига частоты, или на основе распределения по модности, используя много устройств сдвига частоты.
4) программа использует фазовую модуляцию пилообразным сигналом со случайной частотой, чтобы спектр выходного сигнала помехи был подобен спектру при частотной модуляции шумами и сосредоточен в пределах диапазона доплеровских частот радиолокатора (скорости). В качестве модулирующего по фазе сигнала может применяться неограниченный или ограниченный по амплитуде процесс, включая псевдослучайный. Отметим, что этот вид шумовой помехи следует за перестройкой несущей частоты сигнала подавляемого радиолокатора и может производить большие спектральные плотности мощности, например, 100 кВт/МГц.
5) программа создает одну или много фиксированных доплеровских частот, которые могут мерцать и образовывать цели с ложной скоростью в системе поиска РЛС противника по скорости. Это может осуществляться с помощью псевдослучайных последовательностей.
6) программа создает две фиксированные частоты, которые переключаются во времени (включаются и выключаются) с постоянной частотой, равной частоте скрытого конического сканирования подавляемого радиолокатора сопровождения, или с переменной частотой, близкой к ней. При этом получается такой эффект, как и при воздействии амплитудно-модулированной помехи с перестраиваемой частотой сигнала модуляции.
7) Программа 7 является простой разновидностью программы 5. Если в определенных границах поддерживается постоянной радиальная скорость цели относительно позиции ЗРК, то фиксированное смещение частоты вниз может перевести отраженный от цели сигнал в область помех от местных предметов или в область близких к нулевым доплеровским частотам.
8) Программа 8 отчасти подобна программе I, за исключением того, что в данном случае отсутствует временной участок приостановки вблизи доплеровской частоты радиолокационного сигнала.
9) Программа 9 применятся для радиоэлектронного подавления импульсных радиолокаторов со сжатием, использующих ЧМ или ФКМ путем изменения внутриимпульсной структуры.
Произведем расчет необходимой мощности на входе подавляемой БРЛС, для постановщика помех, при этом учтем, что постановщик помех работает по боковым лепесткам. Следует отметить, что дальность от постановщика до БРЛС и от БРЛС до цели равны, так как постановщик расположен на борту противника.
| Расчет мощности передатчика АП, необходимой для создания на входе РЛС отношения (помеха/сигнал) =3 |
Исходные данные
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Мощность постановщика помех выберем равной 3 кВт, что вполне хватит для того, чтобы АП, поступающая на приемник РЛС была достаточно мощной.
Расчет зон прикрытия помехами
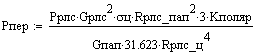
Построим зависимость дальности обнаружения БРЛС от ЭПР помехи от земной поверхности:
![]()
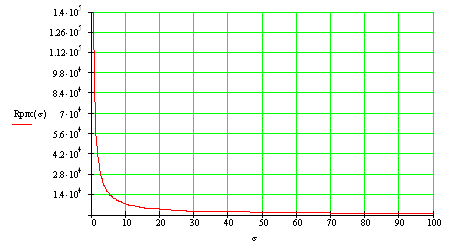
Рис.14
С увеличением ЭПР помехи дальность действия РЛС уменьшается связанно это с большим отражением в сторону РЛС, что может приводить, в свою очередь, к запиранию приемника. Передатчик АП несёт на себе, как правило, воздушное судно, это может быть самолёт радиоэлектронной разведки, или контейнер с оборудованием постановщика может вешаться под крылья более легкого бомбардировщика или истребителя. Размер аппаратуры, а соответственно и конкретное место размещения будет зависеть от требуемой мощности, а значит от расстояния между РЛС и постановщиком, а также от минимального, необходимого расстояния между РЛС и ложной целью. Как правило, на тяжёлые самолеты могут ставиться гораздо более мощные передатчики, это позволяет работать им с больших дистанций, оставаясь в глубоком тылу атакующих порядков истребительной и бомбардировочной авиации. На рис.15 показана зависимость дальности обнаружения БРЛС от мощности постановщика АП, находящегося на удалении 200 км, из которой видно сильное влияние мощности передатчика АП на дальность действия БРЛС.
Рис.15
На рис.333 показана зависимость дальности действия БРЛС от расстояния до нее постановщика помех, которая показывает, что при удалении источника помех, дальность действия БРЛС увеличивается.
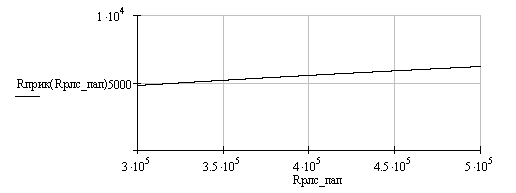
Рис.16
Анализ эффективности применения комплекса помех и средств помехозащитыПостановщик помех может обеспечить срыв сопровождения по скорости, т.к. имеет несколько режимов работы, но это возможно только, если был выбран правильный режим работы постановщика помехи. Для анализа эффективности работы того или иного режима требуется время, что усложняет задачу увода по скорости. Так же требуется учесть тот факт, что на подавляемой РЛС используется АСД, АСС и АСУ в комплексе и решение о наличии помехи принимается путем сравнения результатов этих каналов. Таким образом, для обеспечения нормальной работы помехопостановщика требуется согласовать увод по дальности, скорости и ускорению, чтобы внезапное их изменение не позволило РЛС квалифицировать поведение цели как неестественное. Значит необходимо, чтобы не были превышены допустимые пределы максимального допустимого ускорения стробов дальности и скорости в следящей системе РЛС как в начальный момент увода, так и в любой другой момент цикла увода. Увод стробов дальности и скорости должен начаться в один и тот же момент времени рис.17.

Рис.17.
В свою очередь подавляемая сторона должна не менее грамотно использовать свои возможности: использовать многоканальные РЛС, РЛС разных диапазонов, рассредоточить свои станции на местности и обеспечивать их четкое взаимодействие, применять все другие доступные способы борьбы с помехами.
Таким образом исход радиоэлектронного противодействия во многом зависит от правильного применения своих возможностей с каждой из противодействующих сторон.
Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон
Анализ структурных схем и алгоритмов работы постановщиков помех позволяет сделать вывод о необходимости использования при проектировании таких систем достаточно сложных в изготовлении и настройке элементов и функциональных устройств. К их числу можно отнести устройства мгновенного измерения частоты; высокостабильные генераторы с электронным управлением, используемые как возбудители передатчиков помех и обеспечивающие перестройку по частоте за очень короткие интервалы времени (порядка наносекунд); широкополосные высокочастотные компоненты: ЛБВ и ЛОВ, малошумящие усилители СВЧ, ВЧ-фильтры, быстродействующие переключатели; цифровую высокочастотную память, необходимую для хранения ЗС РЛС и их воспроизведения при постановке УП; сверхбольшие интегральные схемы (СБИС) для организации управления отдельными узлами и системами помехопостановщика. В связи с возможностью размещения постановщиков помех на подвижном носителе (как правило летательный аппарат), перечисленные компоненты должны удовлетворять следующим противоречивым требованиям: иметь минимальные энергопотребление, массу и габариты, хорошую электромагнитную совместимость, сохранять работоспособность при воздействии вибрации и резких изменениях микроклиматических параметров, обладать высокой надежностью.
Основное требование к программным ресурсам конфликтующих сторон - высокая производительность и темп обработки.
Быстродействие АЦП определяется затратами времени на преобразование, которые должны быть меньше длительности временного дискрета. Если быстродействия АЦП недостаточно для преобразования сигналов промежуточной частоты, то переходят к ЦОДЦ и ЦРГФ в виде комплексных фильтров с двумя квадратурными каналами, в которые включены два АЦП, что реализовано в схеме согласованного фильтра, рассмотренной ранее.
Выбор и технико-экономическое обоснование технологической базы для реализации проекта
Практически все современные радиотехнические устройства проектируются с использованием аналоговых и цифровых микросхем ввиду прежде всего их компактности удобства использования. Можно рассмотреть два варианта построения радиоэлектронных систем:
1) с применением аналоговых и цифровых интегральных микросхем в сочетании с дискретными аналоговыми элементами, что позволяет защитить аппаратуру от сильных электромагнитных излучений при достаточном экранировании; также стоимость изделий является довольно низкой, но при этом значительны габаритные размеры и энеропотребление;
2) программируемые цифровые логические микросхемы и микропроцессоры, хоть и незначительно проигрывают в быстродействии, зато они являются более универсальным и гибким инструментом, позволяющим применять их для решения любых задач; также их большим достоинством являются компактность и малое энергопотребление, однако недостатком является высокая стоимость изделий.
С учетом современных условий элементная база, основанная на программируемых логических микросхемах и микропроцессорах является более предпочтительной.
Составление структурной схемы устройства
Структурная схема бортовой РЛС (см. приложение, рис.18) определяет взаимодействие основных узлов импульсно-доплеровской РЛС.
Режимы работы синхронизатора (С) задаются бортовой ЦВМ. Приемник с усилителем промежуточной частоты (УПЧ) имеет как минимум два идентичных канала: дальномерный и угломерный. С угломерного канала поступает информация об угловых координатах цели в режиме обзора и автосопровождения. Информация с дальномерного канала служит для обнаружения, измерения параметров цели в различных режимах.
Основная обработка производится в согласованном фильтре, состоящем из m временных каналов, каждый из m каналов состоит из селектора дальности (СД), квадратурных фазовых детекторов (КФД), АЦП, БПФ, блока объединения квадратур (БОК) и порогового устройства (ПУ). Широкой линией показана обработка в двух квадратурных каналах. Выходы ПУ, число которых определяется числом отраженных импульсов в пачке n, подключены к БЦВМ, где в соответствии с заложенными алгоритмами решаются задачи обнаружения, измерения параметров цели.
Системы автосопровождения по скорости (АСС), дальности (АСД), направлению (АСН) решают задачу сопровождения выбранной цели. Устройство управления (УПР) и привод (П) по командам БЦВМ изменяют положение антенного устройства.
Перевод системы на автоматическое сопровождение цели осуществляется после режима обзора и захвата цели на автосопровождение.
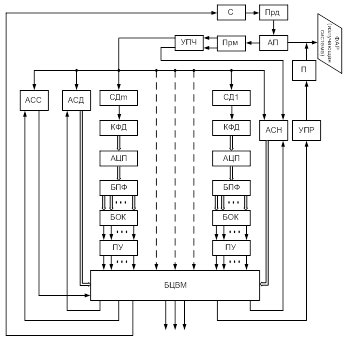
Рис.18
Заключение
В данной курсовой работы был рассмотрен очень сложный вопрос радиоэлектронного противодействия, причем как со стороны постановщика помех, так и с подавляемой этими помехами стороны. Были получены навыки проектирования БРЛС и помехопостановщика, а также рассмотрены возможные способы их построения и возможные проблемы, при этом возникающие. Был проведен технико-экономический анализ элементной базы устройств для того, чтобы они отвечали всем современным требованиям, таким как: многофункциональность, гибкость, малая стоимость эксплуатации и др. В результате проделанной работы можно сделать следующий вывод: было произведено принципиальное структурное проектирование вертолетной РЛС и станции постановщика помех, отвечающие требованиям ТЗ. Но следует отметить, что реальный объем работы при проектировании подобных устройств является гораздо большим, чем позволяют рамки курсового проекта.
Список использованных источников
1. Бакулев П.А., Радиолокационные системы: учебник для вузов. - М.: "Радиотехника", 2004
2. Гуткин Л.С., Теория оптимальных методов радиоприёма при флуктуационных помехах. - М., 1972.
3. Канащенков А.И., Меркулов В.И., Самарин О.Ф., Облик перспективных бортовых радиолокационных систем. Возможности и ограничения. - М.: ИПРЖР, 2002.
4. Финкельштейн М.И., Основы радиолокации, 2 изд. - М.: Радио и связь, 1983.
5. Кошелев В.И., Федеоров В.А., Шестаков Н.Д., Методические указания по курсовому проектированию по дисциплине "Основы теории радиотехнических систем". - Рязань: РГРТА, 1995.
6. Федоров В.А., Методы и устройства обработки сигналов в импульсно-доплеровских радиолокационных станциях. - Рязань: РГРТА, 2006.
7. Бакулев П.А. Радиолокация движущихся целей: Учебник для вузов. - М.: "Сов. радио", 1986.
Похожие работы
... , широкодиапазонности, быстродействия и взаимодействия с другими корабельными системами. Развертывание работ в ВМФ по обоснованию методов и средств радиоэлектронного противодействия (РЭП) явилось следствием проведенных исследований по обобщению и анализу опыта боевых действий на море во второй мировой войне, изучению литературы и немецкой трофейной техники, техники союзников, полученной по ленд- ...
... и передачи защищаемой информации изготовленные в защищенном исполнении. НИИЭВМ РБ разрабатывает и выпускает защищенные носимые, возимые и стационарные ПЭВМ. 3. Средства, предназначенные для контроля эффективности защиты информации. Пассивные средства защиты акустического и виброакустического каналов утечки речевой информации. Для предотвращения утечки речевой информации по акустическому и ...
... – речь, музыку, звуковые сигналы, шум; - обоняние; с помощью носа люди получают информацию о запахах окружающего мира; - вкус; вкусовые рецепторы языка дают возможность получить информацию о том, каков предмет на вкус — горький, кислый, сладкий, соленый; - осязание; кончиками пальцев (или просто кожей), на ощупь можно получить информацию о температуре предмета — горячий он или холодный; ...
... параметры обнаружения. Поскольку принимаемая пачка из N импульсов является когерентной, то . 2. Расчет параметров помехопостановщика 2.1 Расчет мощности передатчика заградительной и прицельной помех помеха помехозащита радиолокационная станция Можно выделить несколько основных типов передатчиков заградительных помех: прямошумовые передатчики; передатчики помех, использующие мощный ...
0 комментариев