Содержание
Введение…………………………………………………………………………..3
1. Характеристика объекта автоматизации……………………………………4
2. Выбор системы автоматического управления подъемным двигателем…..6
3. Асинхронный двигатель как объект автоматического управления………9
4. Расчет параметров контуров регулирования тока и скорости……………13
5. Структурная схема подъемной установки…………………………………15
6. Переходные процессы………………………………………………………16
7. Аппараты контроля и защиты подъемной установки…………………….19
8. Оценка эффективности автоматизации……………………………………29
Заключение………………………………………………………………………33
Список литературы……………………………………………………………...34
Введение
Данный курсовой проект выполняется по дисциплине «Автоматизация установок и комплексов».
Автоматизация производственных процессов играет огромную роль в современном производстве. Особенно в последнее время, когда в аппаратуру автоматизации стали, внедрятся достижения микропроцессорной техники, возможности этой аппаратуры вышли на новый технический уровень.
Повышение мощности горных предприятий, интенсификация горных работ, увеличение глубины шахт предопределяют рост энергопотребления и увеличения единичной мощности шахтных стационарных машин. Возрастает необходимость дальнейшего совершенствования их систем автоматического управления.
К основным требованиям, предъявляемые к перспективным системам, электропривода, следует отнести большую потребность в применении регулируемого электропривода, что необходимо для повышения производительности труда.
Подъемная установка шахтная – основной транспортный комплекс, связывающий подземную часть шахты с поверхностью; предназначена для выдачи ни поверхность добываемого полезного ископаемого и получаемой при проходке горных выработок породы, спуска и подъема людей, транспортирования горно – шахтного оборудования и материалов, а также осмотра армировки и крепления ствола шахты.
Подъемные установки классифицируют по назначению – на главные или грузовые (для транспортировки полезных ископаемых), вспомогательные или грузолюдские (для транспортирования породы, материалов, оборудования, спуска и подъема людей); по типу ствола шахты – на вертикальные и наклонные; по числу канатов; по типу органов навивки; по типу подъемных сосудов – на скиповые, клетьевые, скипо – клетьевые, бадейные; по степени уравновешенности.
В качестве грузовых применяются, как правило, двухскиповые подъемные установки; односкиповые подъемные установки с противовесом используются на шахтах небольшой производительности при многогоризонтной работе или необходимости раздельной выдачи различных сортов (марок) полезных ископаемых. Клетевые подъемные установки применяются для шахт небольшой производительности и глубины. Крупнейшие скиповые установки имеют производительность более 1200 т/ч (скипы грузоподъёмностью до 60 т, скорость движения до 25 м/с).
Для вертикального подъёма используют барабанные одноканатные или многоканатные со шкивом трения подъёмные машины.
Цель курсовой работы рассмотреть автоматизацию скиповой подъемной установки с асинхронным приводом.
АВТОМАТИЗАЦИЯ ПОДЪЕМНОЙ УСТАНОВКИ
1. Характеристика объекта автоматизации.
Главный ствол оборудован двумя скипами СН15-223-1,1 для выдачи горной массы и скипом СН-7-185-1,1 для выдачи породы. Вспомогательный ствол оборудован двухэтажной клетью 2НОВ400-13,2-0,2. Вентиляционные стволы №1 и №2 предназначены для выдачи исходящей струи воздуха и в качестве запасных выходов, оборудованы одноэтажными клетями 1НОВ400-9,0.
Характеристика подъемных установок главного и вспомогательного стволов
|
Наименование показателя |
Ед. изм |
Главный ствол подъемы |
Вспомогат. ствол Одноклетьевые с противовесом |
||||||||
|
Двухскиповой |
Односкповой с противовесом |
№1 |
№2 |
||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
||||||
|
Назначение подъема |
выдача г/массы |
выдача породы |
Спуск – подъем людей и выполнение прочих вспомогательных операций |
||||||||
|
Тип подъема |
одноканатный |
||||||||||
|
Глубина обслуживания горизонта |
м |
605 |
605 |
605 |
605 |
||||||
|
Высота подъема |
м |
688 |
680 |
605 |
605 |
||||||
|
Суточный объем работ |
т |
5350 |
770 |
||||||||
|
Система подъема |
неуравновешенная |
неуравновешенная |
|||||||||
|
Подъемный сосуд |
Скип с секторным затвором |
Клеть двухэтажная неопрокидная на вагонетку ВГ-2,5 |
|||||||||
|
-тип |
СН15-223-1,1 |
СН7-185-1,1 |
2НОВ400-13,2-0,2 |
||||||||
|
-масса |
т |
11,9 |
8,37 |
5,7 |
5,7 |
||||||
|
-геометрическая емкость |
м3 |
15 |
5 |
- |
- |
||||||
|
Расчетная масса полезного груза |
т |
14,3 |
6,7 |
4,0 |
4,0 |
||||||
|
Максимальное число людей в клети |
чел. |
27 |
27 |
||||||||
|
Вес противовеса |
т |
11,72 |
8,462 |
8,462 |
|||||||
|
Канат подъемный: |
круглопрядный |
круглопрядный |
|||||||||
|
-тип |
ЛК-РО |
ЛК-РО |
ЛК-РО |
ЛК-РО |
|||||||
|
-ГОСТ |
7668-80 |
7668-80 |
7668-80 |
7668-80 |
|||||||
|
-диаметр |
мм |
63 |
46,5 |
46,5 |
46,5 |
||||||
|
Машина подъемная |
|||||||||||
|
- тип |
ЦР-6×3,4/0,6 |
ЦР-6×3,4/0,6 |
ЦР-6×3,4/0,6 |
ЦР-6×3,4/0,6 |
|||||||
|
Длительность цикла подъема |
с |
102 |
252 |
284 |
284 |
||||||
Объектом курсового проектирования является двухскиповая подъемная установка главного ствола. Целью курсового проектирования является автоматизация подъемной скиповой установки с асинхронным приводом.
1.1. Общие требования к аппаратуре автоматики шахтной подъемной установки
Нормальная и безаварийная работа подъемной установки обеспечивается при наличии следующих защитных и блокировочных устройств:
- защиты от переподъема;
- защиты от превышения скорости;
- защиты от провисания струны и напуска каната;
- защит и блокировок тормозной системы;
- защит и блокировок, препятствующих поражению электрическим током;
- защит и блокировок, контролирующих работу приводных двигателей;
- блокировки, позволяющей включать двигатель после переподъема или напуска каната только в сторону ликвидации переподъема или напуска каната;
- блокировки системы маслосмазки.
Автоматизированные подъемные установки должны иметь следующие дополнительные защиты и блокировки:
- защиту от обратного хода подъемных сосудов;
- блокировку, контролирующую выполнение команды на растормаживание машины;
- контроль замыкания на «землю» в цепях управления и защиты;
- блокировку, не допускающую перехода с ручного управления на автоматическое и обратно без наложения предохранительного тормоза.
На автоматизированных подъемных установках с асинхронным приводом должна быть установлена защита от чрезмерной продолжительности разгона и дотягивания, воздействующая на предохранительный тормоз. [6]
Устройства управления и защиты шахтных подъёмных машин -комплекс аппаратов, которые выполняют следующие функции:
- получение информации о положении сосуда в стволе;
- ограничение скорости;
- задание скорости подъёма системы автоматического регулирования;
- защиту от переподъёма.
Все перечисленные функции связаны с получением и переработкой информации о положении подъёмных сосудов в стволе. Это является основным содержанием процесса управления машиной, задача которой сводится в конечном счёте к тому, чтобы контролировать перемещение подъёмного сосуда в заданную точку ствола с требуемой точностью, затратив на это минимальное время. Параметры движения при этом не должны выходить за пределы нормативов, определённых «Правилами безопасности в угольных и сланцевых шахтах».
Современные подъёмные машины комплектуются электромеханическими и электрическими аппаратами, позволяющими работать в автоматическом режиме с высокой степенью надежности и безопасности.
2. Выбор системы автоматического управления подъемным двигателем
Развитие подъемных установок связано с совершенствованием как самих подъемных машин, так и их электропривода и систем автоматизации. Требованиям, предъявляемым к электроприводу рудничных подъемных установок, наиболее полно удовлетворяет электропривод по системе ПЧ-АД.
Система управления имеет широкий спектр возможностей:
- управление в ручном и автоматическом режиме
- возможность включения преобразователей в сети со стандартными промышленными протоколами и построение управляющих и мониторинговых систем
- встроенное ПИД-регулирование параметра (например: скорости, давления или температуры)
- полный комплекс защит преобразователя и двигателя и т.д.
Система управления замкнутая, что обеспечивает необходимую точность регулирования. Система управления содержит два контура обратной связи: по скорости и по току.
Канал обратной связи по скорости включает в себя тахогенератор ТГ, как датчик обратной связи, узел суммирования напряжений управления скоростью двигателя ![]() и обратной связи по скорости
и обратной связи по скорости ![]() , регулятор скольжения РС, блок ограничения БО его выходного напряжения
, регулятор скольжения РС, блок ограничения БО его выходного напряжения ![]() , а также узел суммирования напряжения
, а также узел суммирования напряжения ![]() и результирующего напряжения
и результирующего напряжения ![]() . [4]
. [4]
По мере увеличения нагрузки на валу двигателя (моменты М1 и М2 на рисунке 2.1а) и уменьшения скорости и, соответственно сигнала ![]() , увеличивается сигнал рассогласования, пропорциональный абсолютному скольжению двигателя:
, увеличивается сигнал рассогласования, пропорциональный абсолютному скольжению двигателя:
![]()
![]() -
-![]()
![]() ,
,
где ![]() -скорость идеального холостого хода АД, соответствующая исходному сигналу управления
-скорость идеального холостого хода АД, соответствующая исходному сигналу управления ![]() ;
;
![]() -реальная скорость АД при заданной нагрузке на его валу.
-реальная скорость АД при заданной нагрузке на его валу.
При ![]() сигнал
сигнал ![]() на выходе БО, суммируясь с сигналом
на выходе БО, суммируясь с сигналом ![]() (при
(при ![]() ), за счет интегральной составляющей передаточной функции регулятора скорости РС обеспечивает такое приращение сигнала управления
), за счет интегральной составляющей передаточной функции регулятора скорости РС обеспечивает такое приращение сигнала управления ![]() преобразователем частоты, при котором частота его выходного напряжения становится равной
преобразователем частоты, при котором частота его выходного напряжения становится равной ![]() (1+
(1+![]() ). Одновременно с изменением выходной частоты преобразователя меняется по сравнению с начальным
). Одновременно с изменением выходной частоты преобразователя меняется по сравнению с начальным ![]() и его выходное напряжение
и его выходное напряжение ![]() (рисунок 1.1б). При этом скорость двигателя восстанавливается до заданного значения
(рисунок 1.1б). При этом скорость двигателя восстанавливается до заданного значения ![]() , т.е. обеспечивается абсолютная жесткость механической характеристики АД (линия 1 на рисунке 2.1а). Для увеличения перегрузочной способности АД по моменту дополнительно к основному контуру стабилизации скорости использован и канал положительной обратной связи по току статора.
, т.е. обеспечивается абсолютная жесткость механической характеристики АД (линия 1 на рисунке 2.1а). Для увеличения перегрузочной способности АД по моменту дополнительно к основному контуру стабилизации скорости использован и канал положительной обратной связи по току статора.
При повышении максимально допустимого тока статора АД (при ![]()
![]() и, соответственно
и, соответственно ![]() ), регулятор скольжения должен быть исключен из работы, например ограничением его выходного сигнала
), регулятор скольжения должен быть исключен из работы, например ограничением его выходного сигнала ![]() на уровне
на уровне ![]() ( рисунок 1.1в). При этом вступают в работу отрицательные обратные связи по току статора с РТ, обеспечивая за счет одновременного уменьшения частоты и напряжения статора АД до их минимальных значений
( рисунок 1.1в). При этом вступают в работу отрицательные обратные связи по току статора с РТ, обеспечивая за счет одновременного уменьшения частоты и напряжения статора АД до их минимальных значений ![]() и
и ![]() ограничение момента АД при
ограничение момента АД при ![]() на уровне
на уровне ![]() (линия 2 на рисунке 2.1а). Тогда минимальная синхронная скорость двигателя
(линия 2 на рисунке 2.1а). Тогда минимальная синхронная скорость двигателя ![]() будет соответствовать значениям
будет соответствовать значениям ![]() и
и ![]() , а механическая характеристика -линии 3 рисунок 5.1а.
, а механическая характеристика -линии 3 рисунок 5.1а.
Функциональный блок нелинейности БН (рисунок 2.2)служит для сохранения перегрузочной способности двигателя и задает такое соотношение между ![]() и
и ![]() , чтобы компенсировать падение напряжения на активном сопротивлении обмотки статора.
, чтобы компенсировать падение напряжения на активном сопротивлении обмотки статора.
Рассматриваемая СУЭП с ПИ-регуляторами угловой скорости и тока называется двукратноинтегрирующей. Она является астатической как по задающему, так и по возмущающему воздействиям. Управление осуществляется без статической ошибки, т.е. обе составляющие коэффициента статизма равны нулю. Система находит применение при диапазоне регулирования угловой скорости D=2000 и более.
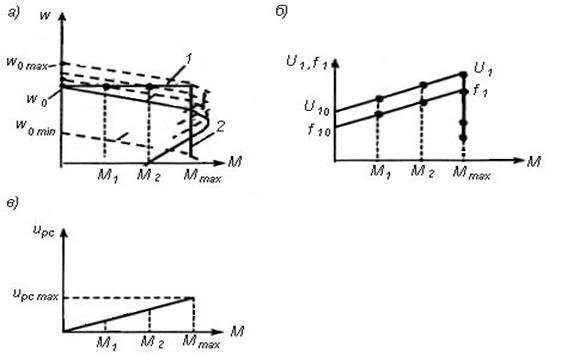
Рисунок 2.1 Статические зависимости переменных электропривода в системе управления по скорости
Функциональная схема системы управления подъемным двигателем представлена на графическом листе 1.
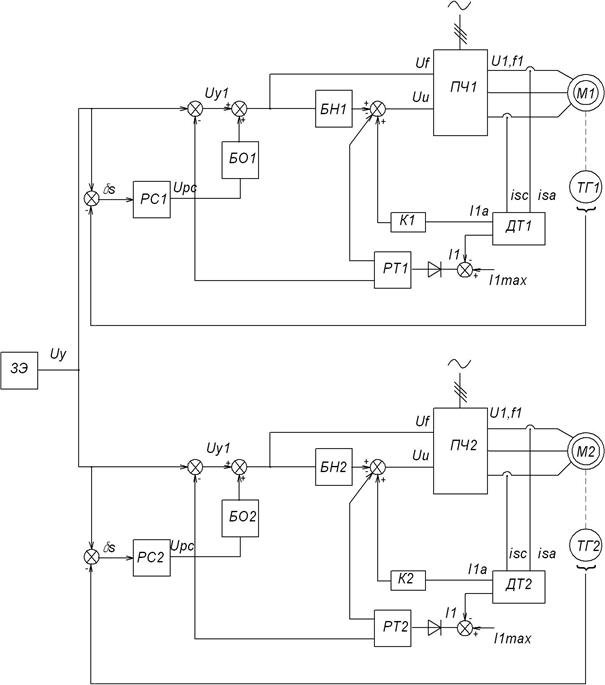
Рисунок 2.2 Функциональная схема системы регулирования
3. Асинхронный двигатель как объект автоматического управления
Прогресс в области силовой преобразовательной техники открывает возможность широкого применения частотно-регулируемого асинхронного привода. Частотное регулирование позволяет получить характеристики привода, подобные характеристикам электроприводов постоянного тока, и даже с более высоким быстродействием за счет большой перегрузочной способности асинхронных электродвигателей и относительно малого момента инерции ротора. В этих условиях на динамические свойства привода существенное влияние оказывают электромагнитные переходные процессы в системе преобразователь частоты- двигатель, без учета которых невозможно получить адекватную математическую модель привода и обеспечить при синтезе требуемые показатели качества процессов управления.
Как правило, двигатели являются многофазными электрическими машинами. Это обстоятельство осложняет математическое описание динамических процессов, так как с увеличением числа фаз возрастает число уравнений электрического равновесия и усложняются электромагнитные связи. В теории электрических машин доказано, что любая многофазная электрическая машина с n-фазной обмоткой статора и m-фазной обмоткой ротора при условии равенства полных сопротивлений фаз статора (ротора) в динамике может быть представлена двухфазной моделью, которая в специальной литературе получила название обобщенной электрической машины, схема которой представлена на рисунке 3.1. [8]
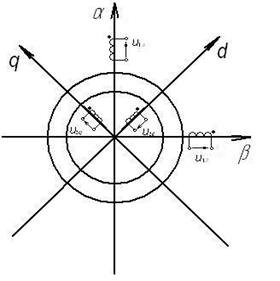
Рисунок 3.1 Схема обобщенной электрической машины
Принадлежность переменной той или иной обмотке определяется индексами, которыми обозначены оси, связанные с обмотками обобщенной машины, с указанием отношения к статору (1) или ротору (2). На рисунке 3.1 система координат, жестко связанная с неподвижным статором, обозначена ![]() , с ротором- d, q. В этом случае число уравнений для равновесия напряжений сокращается. В качестве новой системы координат обычно принимают ортогональную систему координат u,v. Эти оси могут быть неподвижны или вращаться в пространстве с некоторой постоянной скоростью
, с ротором- d, q. В этом случае число уравнений для равновесия напряжений сокращается. В качестве новой системы координат обычно принимают ортогональную систему координат u,v. Эти оси могут быть неподвижны или вращаться в пространстве с некоторой постоянной скоростью ![]() .
.
Преобразование реальных переменных трехфазной машины к реальным переменным эквивалентной двухфазной машины выполняются согласно системам уравнений (1), (2):
![]()
![]() , (1)
, (1)
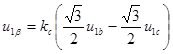
где ![]() -согласующий коэффициент пропорциональности, выбор которого должен осуществляться из условия инвариантной мощности. [8]
-согласующий коэффициент пропорциональности, выбор которого должен осуществляться из условия инвариантной мощности. [8]
![]()
![]() , (2)
, (2)
![]() ,
,
![]() ,
,
![]()
Обратные преобразования выполняются по формулам (3):
![]()
![]() , (3)
, (3)
![]() ,
,
![]() ,
,
![]()
Уравнения механической характеристики двигателя можно представить в виде:
![]()
![]() ,
,![]() (4)
(4)
![]() ,
,
![]() ,
,
![]()
где ![]() , (5)
, (5)
![]() , (6)
, (6)
![]() , (7)
, (7)
![]() , (8)
, (8)
![]() , (9)
, (9)
![]() . (10)
. (10)
Таким образом потокосцепление каждой обмотки в системе координат u,v определяется собственной индуктивностью ![]() или
или ![]() и взаимной индуктивностью
и взаимной индуктивностью![]() с другой обмоткой, расположенной на этой же оси. Параметры подъемного двигателя, необходимые для построения его двухфазной модели, рассчитаны по каталожным данным двигателя. Методика и компьютерная программа расчета представлена в приложении.
с другой обмоткой, расположенной на этой же оси. Параметры подъемного двигателя, необходимые для построения его двухфазной модели, рассчитаны по каталожным данным двигателя. Методика и компьютерная программа расчета представлена в приложении.
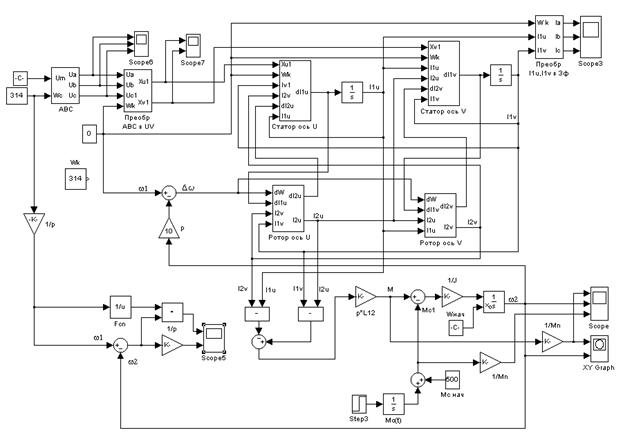
Рисунок 3.4 Двухфазная модель подъемного двигателя
4. Расчет параметров контуров регулирования тока и скорости
Устойчивость и динамические показатели качества регулирования скорости АД определяются выбором параметров пропорциональной и интегральной составляющих передаточных функций регуляторов РС и РТ.
Эквивалентная электромагнитная постоянная времени цепей статора и ротора АД:
 ,
,
где ![]() - угловая скорость электромагнитного поля АД при его номинальной частоте питания
- угловая скорость электромагнитного поля АД при его номинальной частоте питания ![]() ;
;
![]() - для мощных АД общепромышленного исполнения.
- для мощных АД общепромышленного исполнения.
Модуль жесткости линеаризованной механической характеристики АД:
 ,
,
где ![]() - критический момент двигателя.
- критический момент двигателя.
![]() ,
,
где ![]() -электромеханическая постоянная времени привода, с;
-электромеханическая постоянная времени привода, с;
![]() - момент инерции привода,
- момент инерции привода, ![]() .
.
Статический коэффициент передачи преобразователя частоты:
 ,
,
где ![]() -напряжение питания двигателя;
-напряжение питания двигателя;
![]() -напряжение на входе преобразователя частоты.
-напряжение на входе преобразователя частоты.
![]() - постоянная времени цепи управления ПЧ.
- постоянная времени цепи управления ПЧ.
Статический коэффициент передачи тахогенератора:
 ,
,
где ![]() - максимальное задающее напряжение, В;
- максимальное задающее напряжение, В;
![]() -максимальная угловая скорость двигателя, 1/с.
-максимальная угловая скорость двигателя, 1/с.
Статический коэффициент передачи датчика тока:
 ,
,
где ![]() -напряжение на выходе датчика тока при номинальном токе двигателя, В.
-напряжение на выходе датчика тока при номинальном токе двигателя, В.
Регуляторы тока и скорости легко реализуются на операционных усилителях, осуществляющих одновременно с усилением необходимые математические операции над входными электрическими сигналами. Для получения ПИ-регулятора в цепи обратной связи операционного усилителя включают последовательно резистор и конденсатор.
Передаточные функции ПИ-регуляторов скорости и тока:
 ,
,
 .
.
Статический коэффициент передачи регулятора скорости:

где  ;
;
 ,
,
где ![]() .
.
Статический коэффициент передачи регулятора тока:
 .
.
Коэффициент интегральной составляющей ПИ-регуляторов скорости и тока:
![]() - постоянная интегрирования регуляторов.
- постоянная интегрирования регуляторов.
![]() .
.
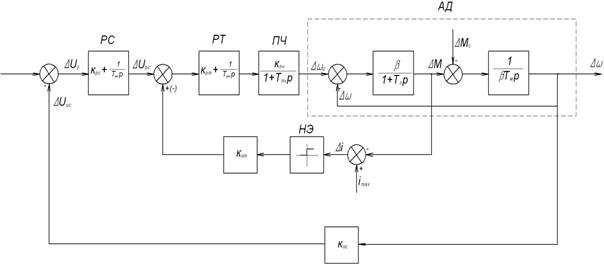
Рисунок 4.1 Структурная схема системы управления
5. Структурная схема подъемной установки
Структурная схема подъемной установки представлена на рисунке 5.1, где звено 14 включает в себя преобразователь частоты и асинхронный двигатель, передаточное устройство – усилитель 20 (коэффициент передачи равен 77), механическая часть привода представлена усилителем 21 (коэффициент передачи равен 0,0000097).
Нагрузка двигателя имеет две составляющие: элемент 25, учитывающий вес поднимаемого груза; переменная составляющая, учитывающая изменение длины подъемного каната в процессе работы, представленная на схеме усилителем 24 с коэффициентом передачи 100.
Система управления приводом построена по принципу подчиненного регулирования координат. Она включает в себя пропорционально – интегральный регулятор скорости, он реализован на элементах 10, 11 и 12, и пропорционально – интегральный регулятор тока, реализованный на элементах 15, 16 и 17.
Блок задания программы движения выполнен на интеграторах 3, 5, 7, 9 и усилителях 2, 4, 6, 8.
Блок задания программы движения формирует диаграмму скорости в зависимости от положения скипа в стволе. Каждый участок диаграммы скорости формируется по сигналу соответствующего датчика. Работа датчиков смоделирована нелинейными элементами 26, 29, 32, усилителями 27, 30, 33 и блоками 28, 31 и 34.
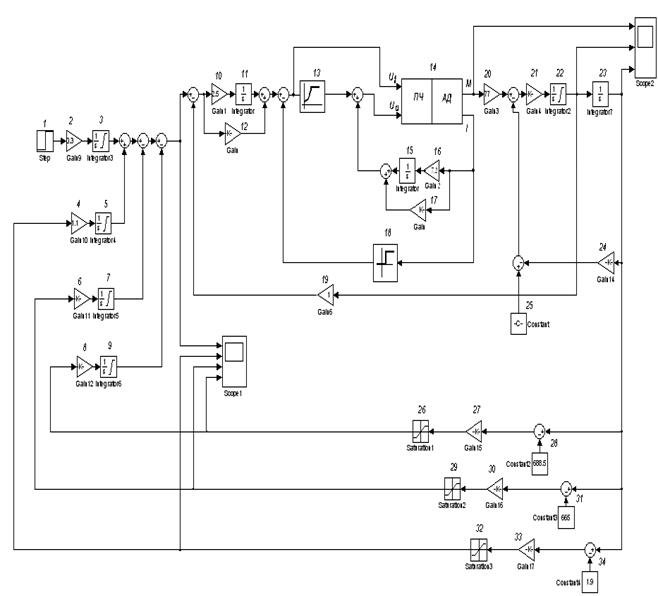
Рисунок 5.1 Структурная схема подъемной установки
6. Переходные процессы
В результате моделирования динамических процессов в системе управления подъемным двигателем на основе структурной схемы подъемной установки получены зависимости момента, скорости и положения скипа в стволе от времени. Переходные процессы, происходящие в системе управления электроприводом подъемной установки, изображены на рисунке 6.1.
Участок 1 – 2 на рисунке 6.1 формируется блоками 1, 2, 3 (рисунок 4.1) по команде загрузочного устройства.
Участок 3 – 4 (период основного ускорения) формируется по сигналу датчика (элементы 32, 33, 34).
Блоки 6, 7 задают программу движения на участке 4 – 5 (участок основного движения).
Когда скип достигнет второго датчика (элементы 29, 30, 31), то датчик подает команду основного замедления (участок 5 – 6). При движении на участке 6 – 7 скип доходит до третьего датчика, который выдает команду на стопорение (участок 7 – 8).
Отличие диаграммы скорости, формируемой по положению скипа в стволе, от диаграммы заданной программным устройством – участок 2-3. Величина участка зависит от загрузки скипа. При большей загрузке скорость скипа меньше расчетной, поэтому за время участка 2 – 3 система дотягивает скип до выхода из направляющих.
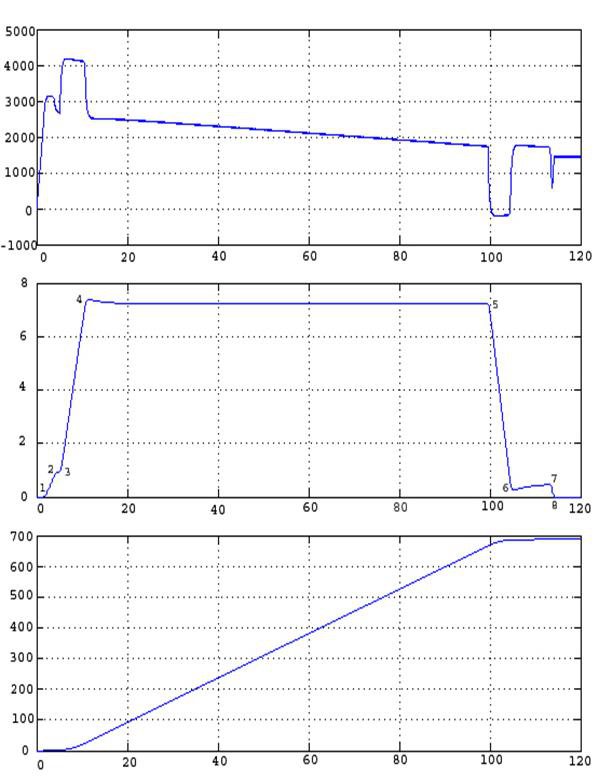
Рисунок 6.1 Переходные процессы
7. Аппараты контроля и защиты подъемной установки
7.1 Аппарат контроля хода и защиты подъёмной машины
Появление автоматизированных многоканатных подъёмных машин потребовало создания специального аппарата, совмещающего в себе многие функции управления и защиты, связанные с получением и переработкой информации о положении подъёмных сосудов в стволе. Аппарат должен содержать набор путевых выключателей и программные устройства, необходимые для автоматизации хода, ограничитель скорости и концевые выключатели для защиты от переподъёма, сельсин-датчик для дистанционной передачи информации на указатель глубины пульта управления и ряд других вспомогательных устройств. Необходимо также обеспечить ввод поправки в случае возникновения рассогласования между положением узлов аппарата и фактическим положением подъёмных сосудов в стволе из-за проскальзывания головных канатов относительно канатоведущего шкива.
Аппарат задания и контроля хода подъёмной машины АЗК предназначен для управления в автоматическом и ручном режимах и защиты однобарабанной подъёмной машины. Аппарат выполняет следующие функции:
- выдаёт импульсы в отдельных точках пути движения подъёмного сосуда для осуществления необходимых переключений в схеме автоматического управления;
- формирует электрические сигналы для работы сельсинного указателя глубины, располагаемого на пульте управления машиной;
- формирует электрический аналоговый сигнал заданной скорости для системы автоматического регулирования скорости подъёма;
- производит автоматическую корректировку положения элементов аппарата в соответствии с фактическим положением подъёмных сосудов в стволе при проскальзывании и упругом переползании канатов относительно канатоведущего шкива;
- осуществляет контроль целости кинематических связей с подъёмной машиной, а также внутренних кинематических цепей аппарата.
Комплектность поставки аппарата АЗК: шкаф с приводом ШПА-1, блок программирования при разъездах на максимальной скорости БПМ-1, блок программирования при разъездах на пониженной скорости БПП-1, реле контроля вращения РКВ-1, электрический ограничитель скорости ЭОС-2, стабилизатор напряжения С-0,75.
Аппарат АЗК состоит из двух симметричных узлов, в каждом из которых имеется набор из 20 путевых выключателей, сельсин-датчик указателя глубины, сельсин-датчик ограничителя скорости, тахогенератор контроля кинематических цепей и корректор.
Кинетическая схема аппарата АЗК показана на рисунке 7.1. Каждая из симметричных частей аппарата получает вращение от входного вала через конический дифференциал, ось сателлитов которого может поворачиваться двигателем корректора. Включаясь во время стоянки машины, двигатель вращает все узлы аппарата, вводя таким образом необходимые поправки.
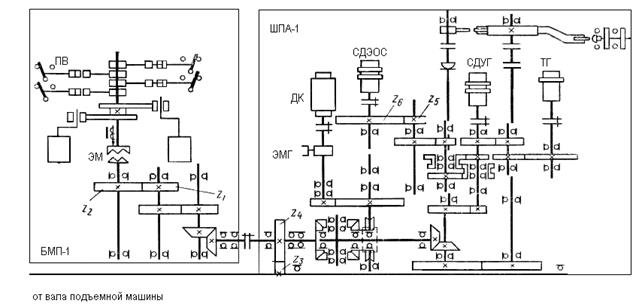
Рисунок 7.1 Кинематическая схема аппарата АЗК
Путевые выключатели аппарата АЗК предназначены для выдачи в систему управления и защиты сигналов о прохождении подъёмным сосудом определённых точек ствола.
Блок этажных выключателей имеет два вертикальных вала, жестко связанные друг с другом посредством зубчатых колес, обеспечивающих поворот одного вала на 28,8, а другого- на 30 оборотов за цикл подъёма. На одном валу укреплены кулачки, а на другом- толкатели. Каждый кулачок и толкатель составляют пару, которая обеспечивает срабатывание одного путевого выключателя. При встрече кулачка и толкателя последний выдвигается и при своём вращении перебрасывает механизм мгновенного переключения, закрепленный неподвижно. Настройка путевого выключателя на срабатывание в определённой точке ствола производится при нахождении в этой точке подъёмного сосуда путём поворота кулачка и толкателя вокруг их валов и до встречи и фиксации их в этом положении с помощью специальных винтов. Высокая точность срабатывания выключателя обусловлена тем, что кулачок и толкатель встречаются только один раз за цикл подъёма.
В каждой симметричной части кинематической схемы шкафа ШПА-1 имеется датчик указателя глубины СДУГ, передача к которому выбрана так, что он поворачивается за цикл подъёма на угол не более 98,5 оборота. Сельсин- датчик электрического ограничителя скорости СДЭОС приводится через сменную пару шестерен z5 –z6, которые выбирают в зависимости от конкретной длины участка замедления таким образом, чтобы на этой длине поворот ротора не превышал 60°. Тахогенераторы ТГ используются в системе контроля исправности кинематических цепей аппарата. Контроль осуществляется с помощью устройства РКВ, которое представляет собой комбинацию двух транзисторных реле скорости, одно из которых получает сигнал скорости от тахогенератора машины, а другое- от тахогенератора аппарата ТГ. Устройство РКВ обеспечивает наложение предохранительного тормоза в случае пропадания любого из этих сигналов. Аппарат комплектуется двумя устройствами РКВ для каждой из симметричных частей отдельно.
В блоках программирования скорости БПМ-1 и БПП-1 применены профильные диски, воздействующие на сельсинные бесконтактные командоаппараты автоматики СКАА. Для повышения масштаба задания скорости профильные диски выполнены отключаемыми. Каждый из блоков программирования содержит пару профильных дисков (для одного и другого направления движения машины), воздействующих на свои командоаппараты, концевые выключатели положения профильных дисков и редуктор с электромагнитной муфтой. Сменная пара шестерен z1 –z2 подбирается таким образом, что на пути разгона (замедления) профильный диск поворачивается на угол не более 180°. Одна половина профильного диска программирует разгон машины, другая - замедление. На протяжении движения с максимальной скоростью, а также на участке дотяжки профильный диск остается неподвижным. Управление электромагнитной муфтой производится от соответствующих путевых и концевых выключателей на валу профильных дисков.
Блок БПМ-1 используется для программирования на максимальной скорости, блок БПП-1 – для автоматизации многогоризонтных подъёмных установок. С помощью последнего программируется пониженная скорость разъездов между сближенными горизонтами, когда путь разъезда не позволяет разогнаться до максимальной скорости. В блоках программирования применены бесконтактные командоаппараты СКАА, выполненные на базе сельсинов БД-501А , работающих в трансформаторном режиме.
Сельсин- датчик указателя глубины СДУГ типа БД-501А соединен с сельсин- приёмником в указателе глубины УГС-4, расположенном на пульте управления машиной.
Сельсин- датчик ограничителя скорости СДЭОС того же типа используется в качестве задатчика допустимой скорости для электрического ограничителя скорости ЭОС-2. СДЭОС осуществляет программирования допустимой скорости в функции положения подъёмного сосуда на участке замедления.
7.2 Пульт управления подъемной машиной
Современные подъемные машины снабжаются пультами управления, на которых сосредоточены все необходимые аппараты для контроля эксплуатационных параметров агрегатов подъемной установки, скорости, местонахождения подъемных сосудов, а также аппараты, предназначенные для воздействия на электропривод и тормозное устройство машины в режиме ручного управления.
Унифицированный пульт шахтного подъёма ПШП предназначен для местного и дистанционного управления работой подъёмных установок. Пульт может нормально работать в помещениях при температуре 5-40°С, относительной влажности не более 80% и высоте над уровнем моря до 2000м. Пульт имеет защищенное исполнение. Выполняемые функции:
- управление разгоном и замедлением привода подъёмной установки с помощью командоаппарата;
- управление приводом тормоза дистанционное с помощью сельсинного указателя глубины;
- визуальный контроль за скоростью подъёма и фиксация действительных тахограмм на диаграммной бумаге;
- сигнализация о наличии напряжения в цепях главного и оперативного тока посредством сигнальных ламп;
- контроль электрической нагрузки подъёмного двигателя в разных режимах;
- фиксация кодовых сигналов управления;
- управление вспомогательными приводами;
- сигнализация о давлении воздуха или масла в тормозной системе;
- сигнализация о состоянии основных узлов и агрегатов подъёмных установок (загрузочное устройство, приёмный бункер, посадочные кулаки, качающиеся площадки и так далее) с помощью световых табло;
- аварийное отключение подъёмной машины кнопкой.
Пульт ПШП имеет только электрическую связь с подъёмной машиной и может устанавливаться как в машинном зале, так и на приёмной площадке. Для машин с дистанционным управлением обычно устанавливаются два пульта (местного и дистанционного управления) с взаимной блокировкой.
В центральной части пульта расположены два сельсинных указателя глубины типа УГС-4. В правой и левой вертикальных тумбах расположены измерительные приборы: регистрирующий таховольтметр, счетчик кодовых сигналов, счетчик циклов подъёма, часы, манометры для контроля тормозной системы, универсальные переключатели. В правой и левой горизонтальных тумбах расположены рукоятки управления машиной и кнопочные пульты. Под ногами машиниста расположены педальные кнопочные посты аварийной остановки и включения динамического торможения.
Левая рукоятка предназначена для управления тормозом подъёмной машины с помощью электропневматического регулятора давления. Рукоятка воздействует на бесконтактный командоаппарат, выполненный на базе сельсина БД-501А, работающего в режиме потенциал – регулятора.
Правая рукоятка предназначена для управления приводом подъёмной машины. Для электропривода переменного тока правая рукоятка пульта воздействует на командоконтроллер КК-8418 или КП-1400.
7.3 Сельсинный указатель глубины
Указатель глубины является единственным источником информации о положении подъёмных сосудов в стволе при ручном управлении подъёмной установкой. От точности и надежности указателя глубины зависят безопасность и производительность работы всей установки.
Сельсинный указатель глубины УГС-4 предназначен для визуального контроля положения подъёмного сосуда в стволе. Указатель устанавливается на пульте управления машиной ПШП. Он работает в комплекте с аппаратом АЗК. Масштабы точной и грубой шкал указателя определяются сменными шестернями передачи к сельсин–датчику, установленному в этих аппаратах. В качестве привода указателя глубины УГС-4 используется сельсин – приёмник БС-501А.
Указатель глубины выполнен по одноканальной схеме, которая предполагает наличие только одного сельсин- датчика СД, делающего большое число оборотов за цикл подъема, и одного сельсин- приемника СП, расположенного на указателе глубины СУГ. В указателе глубины СУГ имеется 2 сельсин- приемника точного и грубого отсчета. Стрелка точного отсчета укреплена непосредственно на валу сельсин- приемника, а стрелка грубого отсчета приводится во вращение через замедляющий редуктор Р, расположенный в СУГ (рисунок 7.2).
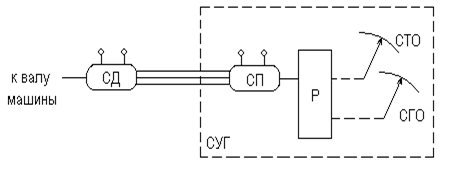
Рисунок 7.2 Схема сельсинного указателя глубины
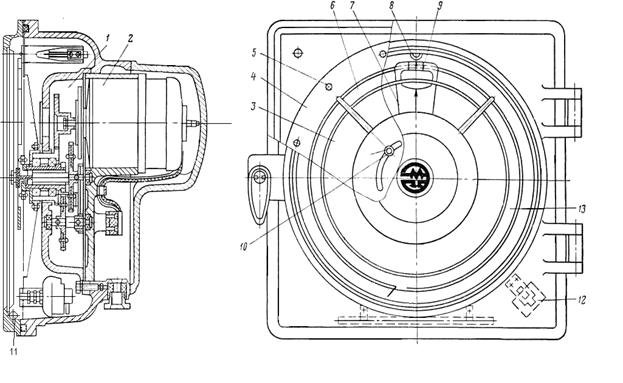
Рисунок 7.3 Указатель глубины УГС-4
Электрический сигнал от сельсин - датчика, механически связанного с валом подъёмной машины через аппарат задания и контроля хода, передаётся на сельсин-приёмник 2 указателя глубины. Сельсин-приёмник передаёт вращение на стрелку (кольцо) точного отсчёта 13 через пару шестерен с передаточным отношением, равным единице, позволяющим делать то же число оборотов, что и сельсин – датчик. В свою очередь визир 7 (стрелка грубого отсчёта) получает вращение от того же сельсин – приёмника через четырёхступенчатый редуктор 1 с передаточным отношением, равным 100, т.е. при одном обороте кольца 11 визир повернется на 3,6°. Этот угол ограничивается имеющимися дополнительными метками 9 на визире, которые служат для визуальной фиксации начала последнего оборота кольца (стрелки точного отсчёта). Со стрелкой грубого отсчёта связаны дополнительные стрелки 5, которые позволяют визуально наблюдать точку перехода на замедление подъёмной машины. При наладке подъёма стрелки устанавливаются в необходимое положение по пути подъёмного сосуда, после чего фиксируются винтами 10. В конструкции указателя глубины имеется контрольная лампа 8, сигнализирующая о последнем обороте стрелки точного отсчёта. Сигнал на лампу поступает или от путевого аппарата, контролирующего ход подъёмной машины, или от датчика, расположенного в стволе. Необходимые отметки горизонтов и приёмных площадок наносятся при наладке карандашом 11 на шкалах 3 и 4, а при необходимости корректировки меток удаляются резинкой 12.
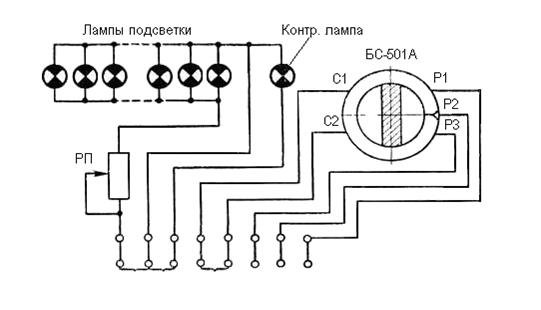
Рисунок 7.4 Электрическая схема указателя глубины УГС-4
Кроме контрольной лампы по окружности шкалы указателя установлен ряд ламп подсветки. Резистор РП служит для установки наиболее удобной машинисту интенсивности подсветки.
7.4 Бесконтактные концевые выключатели
Концевые выключатели применяются на шахтных подъёмных установках для получения электрических сигналов о прохождении подъёмным сосудом определенных фиксированных точек ствола. В большинстве случаев такие сигналы необходимо получать в точках стопорения подъёмных сосудов и в точках переподъёма.
В соответствии с условиями шахтных стволов к конструкции концевых выключателей предъявляются повышенные требования в отношении климатической устойчивости. Выключатели герметичны, хорошо противостоят агрессивной шахтной воде, нормально работают в широком диапазоне перепадов температур окружающей среды. Кроме того, концевые выключатели должны быть быстродействующими, иметь высокую надежность и обладать свойством самоконтроля.
Принцип работы выключателей типов ВМ основан на изменении электрических параметров датчика, установленного в стволе при воздействии на него поля магнита, укрепленного на подъёмном сосуде. В комплект бесконтактного магнитного выключателя входят: магнит МВМ, укрепляемый на подъёмном сосуде, датчик ДВМ и станция СВМ.
Датчик ДВМ представляет собой трансформатор с сердечником в виде О-образной пластины из пермаллоя. На сердечнике имеются первичная и вторичная обмотки. При воздействии на датчик внешнего магнитного поля, создаваемого магнитом МВМ, сердечник намагничивается, и его магнитная проницаемость резко уменьшается. Это приводит к исчезновению напряжения на вторичной обмотке датчика. Датчик заключен в корпус, выполненный из ударопрочной пластмассы, и герметизирован эпоксидной смолой.
Станция СВМ представляет собой транзисторный усилитель переменного тока, на выходе которого включено электромагнитное реле. Принципиальная схема магнитного выключателя типа ВМ-63 показана на рисунке 7.5.
При подаче питания на станцию СВМ (клеммы 1,2) первичная обмотка датчика ДВМ (клеммы К11, К12) также получает питание. При отсутствии вблизи датчика подъёмного сосуда, на вторичной обмотке датчика (клеммы К13, К14) появляется напряжение, которое через входной трансформатор Тp3 поступает на базу транзистора Т и усиливается. В коллекторную цепь этого транзистора включен выходной трансформатор Тp2, питающий через выпрямительный мост ВГ-2, промежуточное реле Р1, которое остается в возбужденном состоянии до тех пор, пока на датчик ДВМ не воздействует магнитное поле. При подходе подъёмного сосуда, несущего магнит МВМ, к датчику напряжение на его клеммах К13 и К14 исчезает, в результате чего реле 1Р отключается и своим размыкающим контактом разрывает цепь катушки выходного реле Р2, контакты которого введены в электрическую схему машины. Катушка реле Р2 включена через свой размыкающий контакт, который может быть зашунтирован перемычкой К9, К10. Если перемычка К9, К10 установлена, то катушка реле Р2 остается отклоненной только в период нахождения подъёмного сосуда в зоне чувствительности датчика. После ухода подъёмного сосуда реле Р2 снова включается.
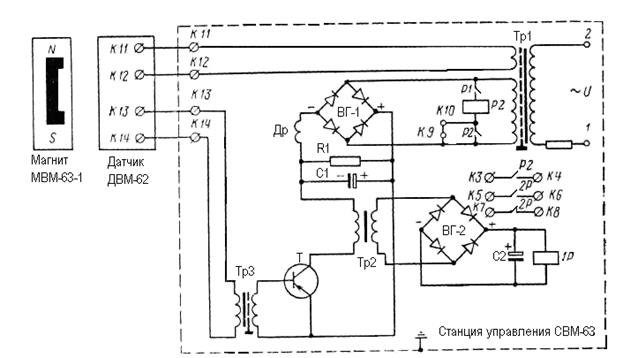
Рисунок 7.5 Принципиальная схема магнитного выключателя ВМ-63
Если перемычка К9, К10 отсутствует, то реле Р2 после воздействия на датчик остаётся отключенным и при отсутствии подъёмного сосуда вблизи датчика. Включение реле Р2 при этом может быть произведено кратковременным замыканием клемм К9, К10. Перемычка К9, К10 не ставится при использовании магнитного выключателя в качестве переподъёмного, а восстановление цепи реле Р2 производится одним из контактов обходного переключателя переподъёма, соединяемого с этими клеммами. Такое включение препятствует самопроизвольному восстановлению цепи защиты в области переподъёма.
Коллекторная цепь транзистора Т питается от выпрямителя, состоящего из диодного моста ВГ-1 и фильтра (Dp, Rl, Cl). Схема обладает свойством самоконтроля всех входящих в него цепей. Действительно, исчезновение питания, обрыв любой цепи, пробой или обрыв транзистора и другие неисправности приводят к исчезновению напряжения на вторичной обмотке трансформатора Тр2 и отключению реле 1Р.
7.5 Ограничитель скорости подъема
Существующие в настоящее время скорости подъема и параметры предохранительного торможения не обеспечивают остановку подъемных сосудов в пределах пути переподъема при подходе их к концевому выключателю крайнего положения с максимальной скоростью. Поэтому для обеспечения безопасной работы подъемная установка снабжена ограничителем скорости, который осуществляет контроль снижения скорости подъема на участке подхода к крайнему положению. Принцип работы состоит в том, что для каждой точки участка замедления задается предельно допустимое значение скорости, с которым сравнивается действительная скорость. Если последняя превышает допустимую, то ограничитель скорости, воздействуя на предохранительный тормоз, останавливает машину.
Описанный выше аппарат АЗК снабжается электрическим ограничителем скорости ЭОС-2, структурная схема которого изображена на рисунке 7.6. В аппарате АЗК расположены сельсин- датчики СД1 и СД2. СД-1 предназначен для программирования допустимой скорости на участке замедления при направлении движения «вперед», а СД-2 – при движении «назад». Путевые выключатели ПВ1,ПВ2 настроены на срабатывание соответственно в точках А и В ствола. На выходные обмотки трансформатора Тр включены 2 идентичных дублирующих друг друга канала сравнения скоростей. Каждый канал состоит из выпрямительного моста В1(В2), диодного аппроксиматора ДА1(ДА2), в качестве элемента сравнения используется нуль-орган НО1(НО2), тахогенератора подъемной машины ТГ1(ТГ2), усилителя переменного тока УПТ1(УПТ2) и реле превышения скорости РПС1(РПС2).
Взаимный контроль дублированных каналов сравнения скорости производится с помощью реле РК, которое соединено с источником питания через параллельные цепочки последовательно включенных размыкающих и замыкающих контактов реле РПС1 и РПС2. Время срабатывания ограничителя скорости ЭОС-2 не превышает 0,1 с.
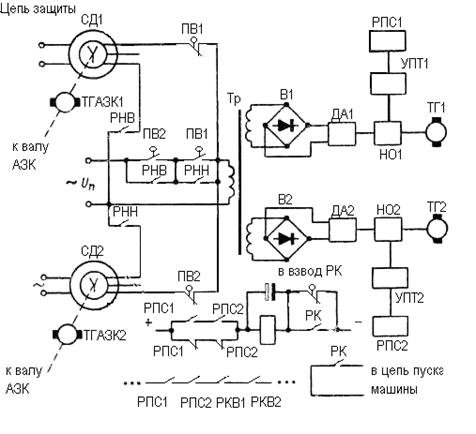
Рисунок 7.6 Ограничитель скорости ЭОС-2
8. Оценка эффективности автоматизации
Оценку эффективности заданного объекта проводим по результатам расчета годового экономического эффекта и срока окупаемости затрат на автоматизацию.
Годовой экономический эффект и срок окупаемости капитальных затрат на автоматизацию для объектов, автоматизация которых не оказывает непосредственное влияние на изменение добычи угля, производим по упрощенным формулам, не требующим расчета полной себестоимости 1т добычи
![]() ;
; ![]() ,
,
Где ΔЗ – изменение эксплуатационных затрат в результате автоматизации объекта, руб./год;
Ка – капитальные затраты на автоматизацию объекта с учетом стоимости монтажных и наладочных работ, руб;
Ен – нормативный отраслевой коэффициент экономической эффективности для угольной промышленности Ен = 0,2.
Изменение эксплуатационных затрат ΔЗ определяется как алгебраическая сумма изменений затрат по заработной плате ΔЗзп, амортизационным отчислениям ΔЗам, материалам ΔЗмт, и расходу электроэнергии ΔЗэн, (в расчете на 1 год)
ΔЗ = ΔЗзп+ ΔЗам+ ΔЗмт + ΔЗэн.
Экономическую эффективность рассчитываем в двух вариантах в базовом и новом. В базовом варианте ведем расчет для скиповой подъемной установки с тиристорным электроприводом двигателя постоянного тока. В новом варианте расчет ведем для скиповой подъемной установки с асинхронным частотно – регулируемым приводом.
Так как итоговая сложность оборудования увеличилась лишь на 5 баллов, то в соответствии ЕНЧ общая численность работников одинакова как для базового, так и для нового варианта. [11]
ΔЗзп = 0 поскольку численность и качество персонала не меняется,
Стоимость оборудования рассчитывается на основе предварительного составленного перечня оборудования (табл. 8.1), действующих цен на оборудование и единых норм амортизационных отчислений на полное восстановление основных фондов.
Таблица 8.1 Сметная стоимость создания активной части ОФ
|
Наименование оборудования |
Кол-во |
Стоим-ть ед. оборуд. тыс.руб. |
Суммарная стоим-ть тыс.руб. |
Транспорт. расходы 4% тыс.руб. |
Монтаж оборуд. тыс.руб. |
Полная стоим-ть тыс.руб. |
Норма амортизации % |
Амортизац. отчисления тыс.руб. |
|||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|||||||||
|
Базовый вариант |
|||||||||||||||||
|
Подъемн двигатель |
1 |
2200 |
2200 |
88 |
220 |
2508 |
3,07 |
76,996 |
|||||||||
|
КТЭУ |
1 |
935 |
935 |
37,4 |
93,5 |
1065,9 |
3,07 |
32,72 |
|||||||||
|
КРУ РН |
6 |
145,612 |
873,672 |
34,95 |
87,367 |
996 |
16,7 |
166,332 |
|||||||||
|
Трансформатор |
1 |
500 |
500 |
20 |
50 |
570 |
10 |
57 |
|||||||||
|
Автомат. выключ. |
6 |
4 |
24 |
0,96 |
2,4 |
27,36 |
20 |
5,472 |
|||||||||
|
Пускатель |
5 |
0,95 |
4,75 |
0,19 |
0,475 |
5,415 |
20 |
1,083 |
|||||||||
|
Осветит. трансформа тор |
1 |
4,45 |
4,45 |
0,78 |
0,445 |
5,073 |
20 |
1,015 |
|||||||||
|
АЗК |
1 |
676,619 |
676,619 |
27 |
67,662 |
771,28 |
20 |
154,256 |
|||||||||
|
Итого: |
5949,028 |
494,874 |
|||||||||||||||
|
Новый вариант |
|||||||||||||||||
|
Подъемн двигатель |
2 |
450 |
900 |
36 |
90 |
1026 |
3,07 |
31,5 |
|||||||||
|
ПЧ |
2 |
750 |
1500 |
60 |
150 |
1710 |
3,07 |
52,497 |
|||||||||
|
КРУ РН |
6 |
145,612 |
873,672 |
34,95 |
87,367 |
996 |
16,7 |
166,332 |
|||||||||
|
Трансформатор |
1 |
30 |
30 |
1,2 |
3 |
34,2 |
10 |
3,42 |
|||||||||
|
Автомат. выключ. |
6 |
4 |
24 |
0,96 |
2,4 |
27,36 |
20 |
5,472 |
|||||||||
|
Пускатель |
5 |
0,95 |
4,75 |
0,19 |
0,475 |
5,415 |
20 |
1,083 |
|||||||||
|
Осветит. трансформа тор |
1 |
4,45 |
4,45 |
0,78 |
0,445 |
5,073 |
20 |
1,015 |
|||||||||
|
АЗК |
1 |
676,619 |
676,619 |
27 |
67,662 |
771,28 |
20 |
154,256 |
|||||||||
|
Итого: |
4575,328 |
415,575 |
|||||||||||||||
ΔЗам = 494,874 – 415,575 = 79,299 тыс. руб.
ΔЗмт = 0 поскольку расход материалов не меняется
ΔЗэн = 5388,472 – 2556,253 = 2832,219 тыс. руб.
ΔЗ = 79,299+2832,219 = 2911,518 тыс. руб.
![]() = 2911,518 – 0,2*4575,328 = 1996,4524 тыс. руб.
= 2911,518 – 0,2*4575,328 = 1996,4524 тыс. руб.
![]() = 4575,328/2911,518 = 1,57
= 4575,328/2911,518 = 1,57
Заключение
В данной работе рассмотрена характеристика объекта автоматизации – скиповой подъемной установки. Выбрана система автоматического управления подъемным двигателем. Рассмотрен асинхронный двигатель как объект автоматического управления. Произведен расчет параметров контуров регулирования тока и скорости. Выполнена структурная схема подъемной установки. Рассмотрены переходные процессы. Выбраны аппараты контроля и защиты подъемной установки.
Для управления подъемной установкой применена замкнутая система подчиненного регулирования, обеспечивающая заданную точность поддержания скорости двигателя. Предложено формировать программу движения скипа в функции его положения в стволе. Это позволяет более точно выдерживать заданную диаграмму скорости движения подъемных сосудов.
Литература
1. Электротехнический справочник. – 4-е изд. испр./ Алиев И.И. – М.: ИП Радио Софт, 2002.
2. Справ. энергетика угольной шахты/ B.C. Дзюбан, Я.С. Риман, А.К. Маслий – М.: Недра, 1983. – 542 с.
3. Руководство по ревизии, наладке и испытанию шахтных
подъемных установок/ В.Р. Бежок, Б.Н. Чайка, Н.Ф. Кузьменко и др. – М.: Недра. 1982.-391 с.
4. Частотно-регулируемый асинхронный электропривод / О.И.Осипов-М.: издательство МЭИ,2004-80 с.
5. Шахтные подъемные установки/ М.М.Федоров-М.: Недра,1979-309 с.
6. Руководство по ревизии, наладке и испытанию шахтных
подъемных установок/ В.Р. Бежок, Б.Н. Чайка, Н.Ф. Кузьменко и др. – М.: Недра. 1982.-391 с.
7. Современные системы автоматизированного электропривода/ В.В.Москаленко-М.: Высшая школа,1980-96 с.
8.Теория электропривода/ Ключев В.И.–М.: Энергоатомиз-
дат, 1998. – 704 с.
9. Автоматизированный электропривод типовых
производственных механизмов и технологических комплексов: учеб
ник для вузов/ М.П. Беликов, В.А.Новиков, Л.Н. Рассудов. - М: Изда
тельский центр «Академия», 2004. - 576 с.
10. Модернизация электропривода и автоматизация шахтных подъемных установок/ Гальперин И.Я., Бежок В.С. – М.: Недра, 1984.–200 с.
11. Единые нормативы численности повременно оплачиваемых рабочих для шахт Донецкого и Львовско-Волынского угольных бассейнов/М.: 1981.
12. Современные системы автоматизированного электропривода/ В.В.Москаленко-М.: Высшая школа,1980-96 с.
11. Энергосберегающий асинхронный электропривод: Учеб. пособие для студ. высш. учеб. заведений/ И.Я. Браславский, 3. Ш. Ишматов, В. Н. Поляков. Под ред. И. Я. Браславского. – М.: Издательский центр «Академия», 2004. – 256 с.
Похожие материалы
... от переподъемов, нулевую и максимальную защиты. - предусматривать остановку сосудов в промежуточных точках ствола. световую сигнализацию о режимах работы подъемной установки в здании подъемной машины, у оператора загрузочного устройства, у диспетчера. Современные регулируемые электроприводы постоянного тока для автоматизированных подъемных установок выполняют на основе двигателей постоянного ...
... конвейерной линии; организация и системы ТО и ППР К обслуживанию ленточных конвейеров допускаются лица, прошедшие медицинское освидетельствование с заключением возможности работы на подземных конвейерных установках, обладающие соответствующими навыками и знаниями по обслуживанию и ремонту конвейеров, прошедшие инструктаж по ТБ, техминимум и имеющие право на обслуживание конвейерных установок. ...
... ; защита отходящих линий - от утечки тока на землю, от короткого замыкания. 1.7 Поверхностный комплекс рудника В поверхностный комплекс рудника входят: склад взрывчатых материалов, компрессорная, котельная, здания подъемных машин шахт "Тишинская", "Ульбинская", "Западная", "Вентиляционная", надшахтные здания "Тишинская" и "Ульбинская", здания вентиляционных установок "Западная", "Ульбинская ...
... выемочной машины; - контролировать перемещение машины и подвигание забоя за определенный период (смену, сутки); - контролировать скорость и машинное время выемки угля; - выдавать информацию о расчетной и фактической добыче угля из лавы и в целом по шахте, а также о производительности комбайнов и конвейерных линий. Кроме того, АИСТ предоставляет информацию о (расчетной - для оценки) фактической ...
... .страх, грн 0,96 Стоимость материалов, грн 3.95 Стоимость энергии, грн 0,77 Амортизационные отчисления, грн 0,24 Себестоимость 1 т. руды 8.32 Специальная часть. 2. Подготовка и организация массового взрыва в блоке 2.1 Понятие о массовом взрыве в шахте Очистка отбойка выполняется большим количеством зарядов, число которых ограничивается устойчивостью кровли, размерами залежи и ...
0 комментариев