Московский Государственный Технический Университет им. Н.Э. Баумана
Курсовая работа по курсу “Нелинейные САУ”
на
тему:
Применение метода частотных круговых диаграмм к исследованию устойчивости систем с логическими алгоритмами управления.
Выполнил: ст-т гр. АК4-81
Смык В.Л.
Руководитель: профессор
Хабаров В.С.
Реутов 1997 г.
Применение метода частотных круговых диаграмм к исследованию устойчивости систем с логическими алгоритмами управления.
На ранней стадии развития теории автоматического регулирования требование устойчивости работы системы было первым и обычно единственным и содержание большинства теоретических исследований сводилось к иследованию устойчивости.
“Термин “устойчивость” настолько выразителен, что он сам за себя говорит”,-отмечают в начале изложения теории устойчивости Ж. Ла Салль и С. Лефшец [1]. Это вполне справедливо, но, несмотря на это, неточности и нелогичности можно встретить как раз не в математических, а в смысловых понятиях и терминах.
Устойчивостью любого явления в обиходе называю его способность достаточно длительно и с достаточной точностью сохронять те формы своего существования, при утрате которых явление перестает быть самим сабой. Однако не только в обиходе, но и в научной терминалогии устойчивым называют не явление, а систему, в корой оно наблюдается, хотя это не оправдывает логически. Устойчивы ли физические тела - шар или куб? Такой вопрос будет иметь смысл, если речь идет о материале, из которого они сделаны. (Металлический шар
устойчив, шар из дыма нет.) Теорию управления интересует, однако, не эта прочнасная устойчивость. Подразумевается, что система управления как инженерная конструкция заведома устойчива, и в теории изучается устойчивость не самой системы, а ее состояний и функционирования. В одной и той же системе одни состояния или движения могут быть устойчивыми, а другие не устойчивыми. Более того, одно и то же жвижение может быть устойчивым относительно одной переменной и неустойцивым относительно другой - это отмечал еще А.М. Ляпунов [2]. Вращение ротора турбины устойчиво по отношению к угловой скорости и неустойчиво относительно угла поворота вала. Движение ракеты устойчиво относительно траектории и неустойчиво по отношению к неподвижной системе координат. Поэтому нужно оговаривать, устойчивость какого состояния или движения в системе и относительно каких переменных изучается. Так же есть много методов для оценки самой устойчивости. Мы рассмотрим как можно оценить устойчивость системы с логическим алгоритмом управления методом круговых диаграмм.
Рассмотрим теоретическую часть и посмотрим что из себя представляет круговой критерий. Пусть дана система
.
x=Ax+bx, s=c’x, (1)
где
x
и s
- в общем случае
векторы (и,
следовательно,
b и с - прямоугольные
матрицы), а матрица
А не имеет
собственных
значений на
линейной оси.
Предположим
, что для некоторого
m,
![]() Ј
m
Ј
Ј
m
Ј![]()
система (1), дополненая соотношением x=-ms, асимптотически усойчива.
Для
абсолютной
экпоненциальной
устойчивости
системы (1) в классе
М(![]() )
нелинейностей
x=j(s,t),
удовлетворяющих
условию
)
нелинейностей
x=j(s,t),
удовлетворяющих
условию
![]() Ј
j(s,t)/s
Ј
Ј
j(s,t)/s
Ј![]() (2)
(2)
достаточно,
чтобы при всех
w,
-Ґ0,
т.е. если нелинейные
характеристики
лежат в 1 и 3 квадрантах,
и ее внешностью,
если сектор
(![]() )
захватывает
два смежных
квадранта. Если
одна из границ
сектора совпадает
с осью абсцисс,
т.е. если
)
захватывает
два смежных
квадранта. Если
одна из границ
сектора совпадает
с осью абсцисс,
т.е. если ![]() =0
или
=0
или ![]() =0
, то область С
будет полуплоскостью,
а ее граница
- вертикальной
прямой, проходящей
соответственно
через -1/
=0
, то область С
будет полуплоскостью,
а ее граница
- вертикальной
прямой, проходящей
соответственно
через -1/![]() или -1/
или -1/![]() .
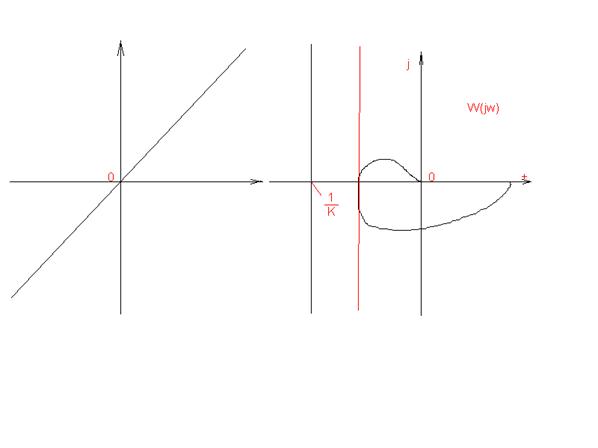
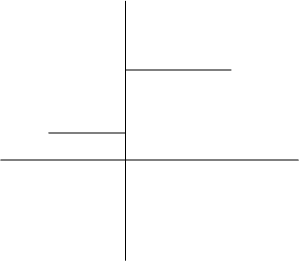
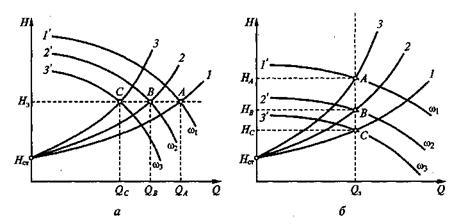
На
рисунке 1 показаны
границы в плоскости
z для различного
расположения
секторов (
.
На
рисунке 1 показаны
границы в плоскости
z для различного
расположения
секторов (![]() )
в плоскости
s,
x.
Там же изображены
кривые W(jw),
w>0
для неособого
случая, расположенные
так, что возможна
абсолютная
устойчивость.
Однако только
приемлимого
расположения
хаоактеристик
W(jw)
еще недостаточно
для суждения
об абсолютной
устойчивости
: кроме этого,
нужно еще
потребовать,
чтобы линейная
замкнутоя
система была
асимптотически
устойчивой.
)
в плоскости
s,
x.
Там же изображены
кривые W(jw),
w>0
для неособого
случая, расположенные
так, что возможна
абсолютная
устойчивость.
Однако только
приемлимого
расположения
хаоактеристик
W(jw)
еще недостаточно
для суждения
об абсолютной
устойчивости
: кроме этого,
нужно еще
потребовать,
чтобы линейная
замкнутоя
система была
асимптотически
устойчивой.
Круговой критерий обеспечивает также абсолютную устойчивость для системы с любым блоком, вход s и выход x которого удовлетворяют для всех t неравенству
(![]() s-x)(x-
s-x)(x-![]() s)і0 (7)
s)і0 (7)
Рисунок 1, а.
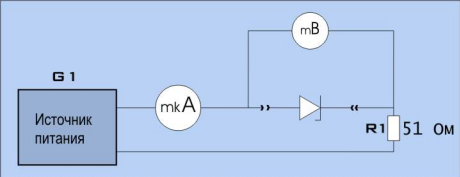
Рассмотрим систему, приведенную на рис. 2.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() А Х Y
А Х Y![]() У
У
![]() (P) Z
(P) Z
 (-)
(-)
![]()
![]() G(p) g
G(p) g
![]()
Рисунок 2.
Здесь
W![]() (p)
- оператор линейной
части системы,
которая может
иметь в общем
случае следущий
вид:
(p)
- оператор линейной
части системы,
которая может
иметь в общем
случае следущий
вид:
![]()
![]()
W![]() (p)=
(p)=![]() ;
;
![]() (8)
(8)
![]() W(p)=
W(p)=![]() ;
;
Алгоритм регулятора имеет вид:
y=Y![]() x,
x,
![]()
![]()
![]()
![]()
![]()
![]()
![]() при
gx>0
при
gx>0
![]() Y
Y![]() = (9)
= (9)
![]() -
-![]() при gx0
при gx0
где
![]() =
=
-
k![]() при g
при g![]() 0,
0,
а гадограф
mW(jw)+1
при
![]()
![]() соответствовал
критерию Найквиста.
соответствовал
критерию Найквиста.
Для исследуемой системы условие (3) удобнее записать в виде
(4) и (5).
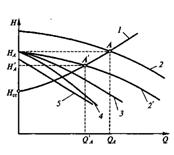
На
рис. 4 приведенны
возможные
нелинейные
характеристики
из класса М(![]() )
и годографы
W(jw),
расположенные
таким образом,
что согласно
(4) и (5) возможна
абсолютная
устойчивость.
)
и годографы
W(jw),
расположенные
таким образом,
что согласно
(4) и (5) возможна
абсолютная
устойчивость.
![]()
![]() y ^
y ^
![]()
y=![]() g (
g (![]() )
)
![]()
![]()
![]()
![]() |x| y=
|x| y=![]() g
(при
g
(при ![]() =0)
=0)
![]()
![]()
![]()
![]()
![]() >
>
![]()
![]() 0
0
“а” “б”
![]()
![]()
![]()
![]()
![]()
![]()
“в” “г”
Рисунок 4.
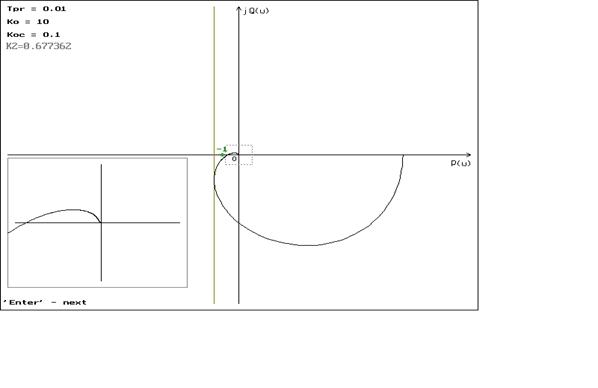
В рассматриваемом случае (10) при
W![]() (p)=
(p)=![]() ,
когда
,
когда
W(p)=
W![]() (p)G(p),
G(p)=
(p)G(p),
G(p)=![]() p+1,
p+1,
годограф W(jw) системы на рис. 5.
![]() j
j
W(jw)
w=Ґ
![]()
![]() >
>![]()
![]()
![]()
![]() =
=![]()
w=0
Рисунок 5.
В случае (10) справедливы графические формы на рис. 4 в,г, т.е. исследуемая система абсолютно устойчива в смысле кругового критерия (3) или (5) при
![]() >
>![]() (14)
(14)
Интересно заметить, что достаточные условия абсолютной устойчивости по Ляпунову
а > 0 , y(t) > 0
и
a > c
для рассматриваемого случая совпадают с достаточными условиями абсолютной устойчивости, полученными для кругового критерия (14), если выполняется требование
y(t) > 0 (15)
поскольку,
согласно (11) и
(13) a=a![]() =
=![]() .
.
Докажем это, используя условия существования скользящего режима
-![]() kЈy(t)=c
kЈy(t)=c![]()
![]() k
k
т.е. подставим сюда вместо коэфициентов а,с, и k их выражения через
![]() ,
,
![]() ,
,
![]() ,
тогда получим
,
тогда получим
-![]()
![]() Ј
Ј![]() y(t)=
y(t)= Ј
Ј![]()
![]() (16)
(16)
Согласно рис. 5 и условия (16) получаем:
1) при
![]() =
= ![]() ,
y(t)=0
,
y(t)=0
2) при
![]() >
> ![]() ,
y(t)>0
,
y(t)>0
3) при
![]()
![]() ,
y(t)
,
y(t)![]() , то можно сделать
вывод, что коректор
будет влиять
только на высоких
частотах, а на
низких будет
преобладать
, то можно сделать
вывод, что коректор
будет влиять
только на высоких
частотах, а на
низких будет
преобладать
![]() ,
что можно наблюдать
на графиках
1.1 - 1.4. На графиках
1.5 - 1.8 можно наблюдать
минемальные
значения
,
что можно наблюдать
на графиках
1.1 - 1.4. На графиках
1.5 - 1.8 можно наблюдать
минемальные
значения ![]() ,
это значит что,
при этих значениях
будет максимальные
значения полки
нечувствительности
релейного
элемента.
,
это значит что,
при этих значениях
будет максимальные
значения полки
нечувствительности
релейного
элемента.
Минемальные
значения полки
нечуствительности
можно наблюдать
на графиках
1.9 - 1.12, особенно
при минемальном
значении
![]() .
.
Приложение N 1.
Программа для построения годографов на языке программирования
СИ ++.
#include
#include
#include
#include
#include
#include
#include
#include
void Godograf(float Tpr, float Ko, float Kos, int Color,
int Xc, int Yc, int x, int y, int z, int err);
void Osi(int Xc, int Yc, int kol);
int xmax, ymax;
float Kos[]={0.1,1.0},
Ko[] ={10.0,100.0},
Tpr[]={0.01,0.09,0.2,0.5};
void main(void)
{
float P_w, Q_w, w;
int driver, mode, err;
driver = DETECT;
initgraph(&driver,&mode,"");
err = graphresult();
if (err!=grOk) {cout
Похожие работы

... некоторого m, £ m £ система (1), дополненая соотношением x=-ms, асимптотически усойчива. Для абсолютной экпоненциальной устойчивости системы (1) в классе М() нелинейностей x=j(s,t), удовлетворяющих условию £ j(s,t)/s £ (2) достаточно, чтобы при всех w, -¥<w<+¥, выполнялось соотношение Re{[1+w)][1+W(jw)]}>0. (3) Круговой ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... рисунков в формате А0-А1 со скоростью 10-30 мм/с. Фотонаборный аппарат Фотонаборный аппарат можно увидеть только в солидной полиграфической фирме. Он отличается своим высоким разрешением. Для обработки информации фотонаборный аппарат оборудуется процессором растрового изображения RIP, который функционирует как интерпретатор PostScript в растровое изображение. В отличие от лазерного принтера в ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...
0 комментариев