Южно Уральский Государственный Университет
Кафедра “Автоматики и телемеханики”
К У Р С О В А Я Р А Б О Т АПо теме “Моделирование систем управления”
Вариант № 17
Выполнила: Киселева Е.В.
Группа 421
Проверил: Стародубцев Г.Е.
Миасс, 1999 г.
Задание на курсовое проектирование
1. Провести полный факторный эксперимент вида 3^3 с моделью BLACK BOX
2. Методом регрессионного анализа получить аналитическую зависимость
y=f(x1,x2,t)
3. Составить модель полученного уравнения регрессии.
4. Провести оценку адекватности уравнения регрессии заданной модели по критерию Фишера для a=0,05 , рассчитать среднее абсолютное отклонение координат аналитической модели от заданной.
5. Провести оценку значимости коэффициентов регрессии по критерию Стьюдента для a=0,05
6. Получить графики ошибки
ym-yr=f(t)
ym - выходная координата модели BLACK BOX
yr - выходная координата созданной модели
Значения параметров:
x1= 0.6 ... -1.4
x2= 2.0 ... 0.6
t = 2 ... 10
b = 1.1
Экспериментальные данные.
1. Составим последовательность имитации эксперимента, исходя из данных курсового задания, и представим в матричной форме. Имитационная модель – это модель системы управления с введением случайной переменной погрешности b=1,1.
Необходимо найти аналитическое уравнение связи параметров системы и числовых знаковых коэффициентов. Уравнение регрессии имеет следующий вид:
Y=b0+Sbixi+Sbijxixj+Sbiixi2
bixi – линейная регрессия,
bijxixj- неполная квадратичная регрессия,
biixi2- квадратичная регрессия.
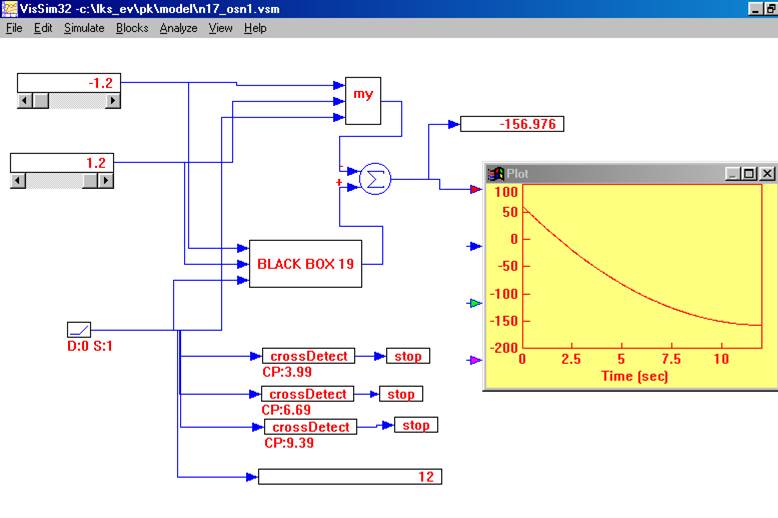
Схема для проведения экспериментов (приложение №1 Vissim 32)
Матричная форма имитационного эксперимента.
| x0 | x1 | x2 | x3=t | x1*x2 | x1*x3 | x2*x3 | x1*x1 | x2*x2 | x3*x3 |
| 1 | 0,6 | 2 | 10 | 1,2 | 6 | 20 | 0,36 | 4 | 100 |
| 1 | 0,6 | 2 | 6 | 1,2 | 3,6 | 12 | 0,36 | 4 | 36 |
| 1 | 0,6 | 2 | 2 | 1,2 | 1,2 | 4 | 0,36 | 4 | 4 |
| 1 | 0,6 | 1,3 | 10 | 0,78 | 6 | 13 | 0,36 | 1,69 | 100 |
| 1 | 0,6 | 1,3 | 6 | 0,78 | 3,6 | 7,8 | 0,36 | 1,69 | 36 |
| 1 | 0,6 | 1,3 | 2 | 0,78 | 1,2 | 2,6 | 0,36 | 1,69 | 4 |
| 1 | 0,6 | 0,6 | 10 | 0,36 | 6 | 6 | 0,36 | 0,36 | 100 |
| 1 | 0,6 | 0,6 | 6 | 0,36 | 3,6 | 3,6 | 0,36 | 0,36 | 36 |
| 1 | 0,6 | 0,6 | 2 | 0,36 | 1,2 | 1,2 | 0,36 | 0,36 | 4 |
| 1 | -0,4 | 2 | 10 | -0,8 | -4 | 20 | 0,16 | 4 | 100 |
| 1 | -0,4 | 2 | 6 | -0,8 | -2,4 | 12 | 0,16 | 4 | 36 |
| 1 | -0,4 | 2 | 2 | -0,8 | -0,8 | 4 | 0,16 | 4 | 4 |
| 1 | -0,4 | 1,3 | 10 | -0,52 | -4 | 13 | 0,16 | 1,69 | 100 |
| 1 | -0,4 | 1,3 | 6 | -0,52 | -2,4 | 7,8 | 0,16 | 1,69 | 36 |
| 1 | -0,4 | 1,3 | 2 | -0,52 | -0,8 | 2,6 | 0,16 | 1,69 | 4 |
| 1 | -0,4 | 0,6 | 10 | -0,24 | -4 | 6 | 0,16 | 0,36 | 100 |
| 1 | -0,4 | 0,6 | 6 | -0,24 | -2,4 | 3,6 | 0,16 | 0,36 | 36 |
| 1 | -0,4 | 0,6 | 2 | -0,24 | -0,8 | 1,2 | 0,16 | 0,36 | 4 |
| 1 | -1,4 | 2 | 10 | -2,8 | -14 | 20 | 1,96 | 4 | 100 |
| 1 | -1,4 | 2 | 6 | -2,8 | -8,4 | 12 | 1,96 | 4 | 36 |
| 1 | -1,4 | 2 | 2 | -2,8 | -2,8 | 4 | 1,96 | 4 | 4 |
| 1 | -1,4 | 1,3 | 10 | -1,82 | -14 | 13 | 1,96 | 1,69 | 100 |
| 1 | -1,4 | 1,3 | 6 | -1,82 | -8,4 | 7,8 | 1,96 | 1,69 | 36 |
| 1 | -1,4 | 1,3 | 2 | -1,82 | -2,8 | 2,6 | 1,96 | 1,69 | 4 |
| 1 | -1,4 | 0,6 | 10 | -0,84 | -14 | 6 | 1,96 | 0,36 | 100 |
| 1 | -1,4 | 0,6 | 6 | -0,84 | -8,4 | 3,6 | 1,96 | 0,36 | 36 |
| 1 | -1,4 | 0,6 | 2 | -0,84 | -2,8 | 1,2 | 1,96 | 0,36 | 4 |
Матрица значений полученных в результате эксперимента.
| y0 | y1 | y2 | y3 | y4 | Ysr |
| 235,09 | 235,41 | 235,727 | 234,95 | 236,37 | 235,51 |
| 134,71 | 136,34 | 136,881 | 135,22 | 135,76 | 135,78 |
| 67,067 | 68,544 | 67,82 | 68,197 | 68,574 | 68,04 |
| 140,38 | 140,7 | 141,017 | 140,24 | 141,66 | 140,8 |
| 60,996 | 62,634 | 63,171 | 61,508 | 62,046 | 62,071 |
| 14,357 | 15,834 | 15,11 | 15,487 | 15,864 | 15,33 |
| 64,287 | 64,606 | 64,926 | 64,146 | 65,565 | 64,706 |
| 5,906 | 7,544 | 8,081 | 6,418 | 6,956 | 6,981 |
| -19,73 | -18,26 | -18,979 | -18,6 | -18,23 | -18,759 |
| 100,25 | 100,57 | 100,887 | 100,11 | 101,53 | 100,67 |
| 65,866 | 67,504 | 68,041 | 66,378 | 66,916 | 66,941 |
| 64,227 | 65,704 | 64,98 | 65,357 | 65,734 | 65,2 |
| -9,162 | -8,843 | -8,523 | -9,303 | -7,884 | -8,743 |
| -22,54 | -20,91 | -20,368 | -22,03 | -21,49 | -21,468 |
| -3,182 | -1,705 | -2,429 | -2,052 | -1,675 | -2,2086 |
| -99,95 | -99,63 | -99,313 | -100,1 | -98,67 | -99,533 |
| -92,33 | -90,7 | -90,158 | -91,82 | -91,28 | -91,258 |
| -51,97 | -50,5 | -51,219 | -50,84 | -50,47 | -50,999 |
| -53,19 | -52,87 | -52,553 | -53,33 | -51,91 | -52,773 |
| -21,57 | -19,94 | -19,398 | -21,06 | -20,52 | -20,498 |
| 42,787 | 44,264 | 43,54 | 43,917 | 44,294 | 43,76 |
| -177,3 | -177 | -178,663 | -177,4 | -176 | -177,28 |
| -124,7 | -123 | -122,509 | -124,2 | -123,6 | -123,61 |
| -39,32 | -37,85 | -38,569 | -38,19 | -37,82 | -38,349 |
| -282,8 | -282,5 | -282,153 | -282,9 | -281,5 | -282,37 |
| -209,2 | -207,5 | -206,999 | -208,7 | -208,1 | -208,1 |
| -102,8 | -101,3 | -102,059 | -101,7 | -101,3 | -101,84 |
Вычислим коэффициенты B по формуле
B=(XTX)-1XTYsr
XT – транспонированная матрица
Ysr- средние экспериментальные значения
| b0 | -29,799251 |
| b1 | 13,6541852 |
| b2 | 9,96405181 |
| b3 | -15,946707 |
| b4 | -21,000048 |
| b5 | 16,508325 |
| b6 | 7,50010119 |
| b7 | -9,3224778 |
| b8 | 19,0904535 |
| b9 | 0,99813056 |
Вычисления производились в Microsoft Excel по следующей формуле
=МУМНОЖ(МУМНОЖ(МОБР(МУМНОЖ(ТРАНСП (Хматрица);Хматрица));ТРАНСП(Хматрица));Yматрица)
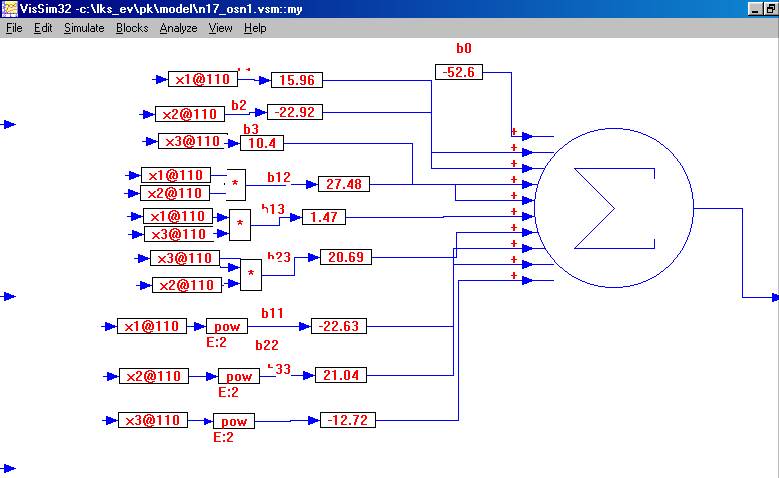
Полученные коэффициенты подставим в уравнение регрессии и построим схему для проведения эксперимента (приложение №2,3 Vissim 32) и проведем эксперимент без использования дельты или шума.
Внесем полученные данные в столбец (Yip) таблицы.
| Ysr | Si кв | Yip | (Yi-Yip)2 |
| 235,51 | 0,3219 | 234,7 | 0,61090 |
| 135,78 | 0,7492 | 135,5 | 0,06574 |
| 68,04 | 0,3897 | 68 | 0,00163 |
| 140,8 | 0,3219 | 140 | 0,68327 |
| 62,071 | 0,75 | 61,77 | 0,09060 |
| 15,33 | 0,3897 | 15,25 | 0,00646 |
| 64,706 | 0,3214 | 63,93 | 0,60218 |
| 6,981 | 0,75 | 6,73 | 0,06300 |
| -18,759 | 0,3897 | -18,78 | 0,00046 |
| 100,67 | 0,3219 | 99,93 | 0,54258 |
| 66,941 | 0,75 | 66,73 | 0,04452 |
| 65,2 | 0,3897 | 65,21 | 0,00009 |
| -8,743 | 0,3214 | -9,51 | 0,58829 |
| -21,468 | 0,75 | -21,71 | 0,05856 |
| -2,2086 | 0,3897 | -2,23 | 0,00046 |
| -99,533 | 0,3216 | -100,3 | 0,51380 |
| -91,258 | 0,75 | -91,45 | 0,03686 |
| -50,999 | 0,3897 | -50,97 | 0,00082 |
| -52,773 | 0,3214 | -53,48 | 0,49985 |
| -20,498 | 0,75 | -20,68 | 0,03312 |
| 43,76 | 0,3897 | 43,79 | 0,00088 |
| -177,28 | 0,9015 | -177,6 | 0,12013 |
| -123,61 | 0,7492 | -123,8 | 0,04902 |
| -38,349 | 0,3897 | -38,35 | 0,00000 |
| -282,37 | 0,3219 | -283,1 | 0,48525 |
| -208,1 | 0,7492 | -208,3 | 0,02938 |
| -101,84 | 0,3892 | -101,8 | 0,00240 |
| SSi=13,73 | S=5,13026 | ||
Так как результаты опытов обладают статической неопределенностью, поэтому опыты воспроизводим несколько раз при одних и тех же значениях факторов для повышения точности коэффициентов регрессии за счет эффекта понижения дисперсии.
n=27- экспериментов
m=10 – количество членов уравнения
Si2=1/g-1*S(Ygi-Yi)2 , g- количество экспериментов ( 5)
Sy2=1/n*SSi2
S0= å(Yi-Yip)2/n-m – среднеквадратичная ошибка на степень свободы
d=å|Yi-Yip|/n – среднее обсолютное отклонение между расчетными значениями
Адекватность вида регрессии уравнения определяется по критерию Фишера, а значимость коэффициентов по критерию Стьюдента и доверительного интервала на его основе.
Fрасч= S02/Sy2<Fтабл(a, n-m)
Fтабл=1,77 ,
a=0,05 – уровень значимости
1-a®р – вероятность с которой уравнение будет адекватно.
n-mÞ27-10=17 – число степеней свободы
SDbj2=Sy2/n - дисперсия коэффициентов взаимодействия
Dbj=±tc* Ö Sy2/ Ö n
tc=2,12
| Sy2 | 0,5085 | Fрасч. | 1,08031201 | |
| So | 0,5493 | Sg2 | 0,01883355 | |
| d | 0,4359 | Dbj | 0,29093901 | |
|
| p | 0,95 |
Fтабл=1,75> Fрасч.= 1,08, значит система адекватна.
Уравнение регрессии примет вид.
Y=-29,79+13,65x1+9,96x2-15,94x3-21x1x2+16,5x1x3 +7,5x2x3-9,32x12+19,09x22+0,99x32
График ошибки (см. приложение № 4).
Вывод.
Исходя из полученных значений сделаем вывод, что полученная система очень мало отличается от заданной.
Уравнения адекватны
Коэффициенты значимы
Приложение № 1
Приложение № 2
Похожие работы
... цепи W1(s) = Wp(s) представлено как параллельное соединение простейших звеньев. 2.9 Неопределенность моделей систем управления Математические модели не отражают исчерпывающим образом динамические свойства систем управления в силу идеализации и упрощений, неизбежных при моделировании, неточной реализации алгоритмов управления и изменений характеристик объектов и других элементов в ...
ельно. Моделями словесного описания можно считать, например, должностные инструкции, штатное расписание, деловые письма (модель некоторой ситуации), а также так называемые модели систем управления: бюрократическую модель Макса Вебера, неоклассическую модель, профессиональную модель и модель принятия решений Герберта Саймона; ü модели графического описания используются для изучения ...
... мировой войны. В учебниках по экономике обычно разбирается «дилемма заключенного» и точка равновесия по Нэшу (ему присуждена Нобелевская премия по экономике за 1994 г.)[23]. Моделирование процессов управления предполагает последовательное осуществление трех этапов исследования. Первый - от исходной практической проблемы до теоретической чисто математической задачи. Второй – внутриматематическое ...
... них 10 час. – обзорные лекции, 4 час. –практические занятия, 6 час. – лабораторные работы на ЭВМ. Рабочая программа курса «Моделирование систем радиосвязи и сетей радиовещания». СОДЕРЖАНИЕ ДИСЦИПЛИНЫ 1 Введение Цели и задачи дисциплины. Основные понятия теории моделирования систем. Использование моделирования при исследовании и проектировании сетей ...
0 комментариев