Подпись
Изм
Лист
Лист
№ документа
Содержание
1 Введение 1
2 Назначение и область применения 3
3 Технические характеристики 4
4 Структурная схема передатчика 4
5 Разработка и расчёт основных блоков схемы 6
5.1 Параметры НС – кода 6
5.2 Выбор комбинаций НС – кода 9
5.2.1 1 –я посылка 10
5.2.2 2-ая посылка 13
5.3 Выбор АЦП 15
5.4 Расчёт делителя напряжения 18
5.5 Реализация регистра 19
5.6 Разработка логического узла 20
5.7 Выбор передаваемых частот и полос пропускания 20
5.8 Расчёт генераторов гармонических колебаний 22
5.9 Расчёт полосовых фильтров 24
5.10 Разработка блока управления 26
6 Основные требования к алгоритмам диагностирования 28
7 Техническая диагностика и прогнозирование 31
8 Связь технической диагностики с надежностью и качеством 34
9 Основы теории технической диагностики 37
10 Разработка технического диагностирования 39
11 Разработка схемы диагностирования 43
12 Диагностирование работоспособности системы 45
13 Заключение 47
1 Введение
Проектирование современных систем телемеханики в корне отличается от тех же систем спроектированных буквально несколько лет назад. Это объясняется в первую очередь тем, что для построения современных систем телемеханики широко используются интегральные микросхемы и средства вычислительной техники.
Использование современных технологий неизбежно влечёт к повышению скорости работы систем, улучшения качества и размеров систем, повышению точности и т.д., по сравнению со своими предшественниками, выполненными на транзисторах и диодах. Так кроме традиционных функций (телеуправление, телеизмерение, телесигнализация, телерегулирование и передача статистической информации) они могут осуществлять предварительный отбор информации после её сбора, образовывать сигналы, оптимальные для передачи по данному каналу связи, принимать решения для управления местной автоматикой, выдавать по выбору и повторно информацию диспетчеру для визуального контроля и регулирования и т.д.
Кодирование применяемое в современных системах телемеханики позволяет повышать их защищённость от помех за счёт более совершенных кодов которые в схемной реализации более просты чем их соратники, а сжатие данных позволяет увеличить объём передаваемой информации по тем же каналам связи.
Устройства телеизмерения (ТИ) осуществляют передачу на расстояние значений измеряемых величин, их регистрации или ввода данных в автоматическое устройство. Все системы ТИ подразделяют на аналоговые и дискретные. Дискретные системы ТИ наиболее близки по принципам построения схем и используемой аппаратуре к системам телеуправления. Характерная особенность дискретных систем – осуществление в передающем устройстве операции квантования по уровню. При этом вместо передачи непрерывного ряда значений измеряемой величины передаётся конечное её значений (уровней), каждому из которых соответствует при кодировании определённая кодовая комбинация. В зависимости от принципа кодирования различают частотно-импульсные (использующие числовой код) и кодово-импульсные (использующие многоэлементный код) дискретные системы ТИ.
К аналоговым системам принято относить такие системы ТИ, в которых каждому из непрерывного ряда значений измеряемой величины соответствует вполне определённый сигнал ТИ.
Основное преимущество дискретных систем по сравнению с аналоговыми – незначительное влияние изменения параметров линии связи и помех в каналах связи на передаваемые сигналы.
К преимуществам кодово-импульсных систем ТИ следует отнести высокую помехоустойчивость и отсутствие принципиальных ограничений для повышения точности телепередачи, обусловленные дискретным характером сигналов. Кроме того, такие системы приспособлены для вывода информации в цифровой форме.
В кодово-импульсных системах кодируется либо угол поворота стрелки первичного измерительного прибора, либо унифицированный электрический параметр (ток или напряжение), в которой предварительно преобразуется измеряемая величина.
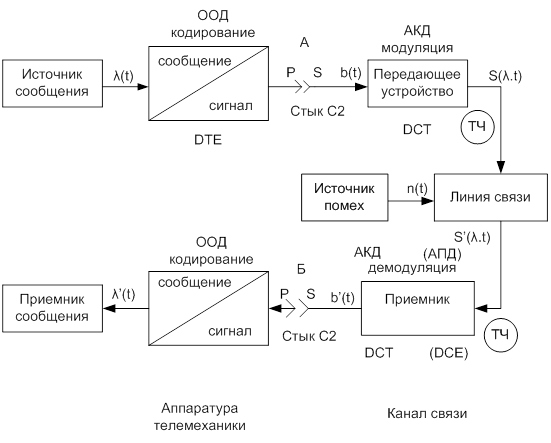
Задача кодирования сообщения в общем случае заключается в согласовании свойств источника сообщений со свойствами канала связи. Различают кодирование источника сообщений (эффективное кодирование) и кодирование, учитывающее влияние помех в канале связи (помехоустойчивое кодирование).
2 Назначение и область применения
Устройства телеизмерения осуществляют передачу на расстояние значений измеряемых величин, их регистрации или ввода данных в автоматическое устройство. В основном такие системы применяются в условиях, когда передача данных затруднительна в прямом виде, тогда стаёт вопрос о применении таких систем.
3 Технические характеристикиОсновные технические характеристики разрабатываемого передатчика системы телеизмерения имеют следующие значения:
| - диапазон изменения измеряемой величины, В | 0 – 15 |
| - допустимая приведённая погрешность измерения, В | 2.8 |
| - максимальная частота изменения измеряемого напряжения, Гц | 100 |
| - метод разделения сигналов | Частотно-временной |
| - метод избирания | Частотно-распределительно-комбинационный |
| Вид проектируемого устройства | Передатчик |
| - код | Неприводимый сменно-посылочный (НС) |
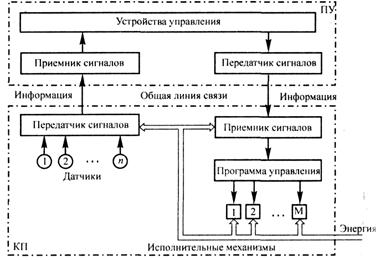
4 Структурная схема передатчика
Разрабатываемая схема приёмника должна осуществлять передачу полученной информации без временных интервалов между посылками, а также производить её обработку с наименьшим временем.
Структурная схема изображена на рисунке 4.1.
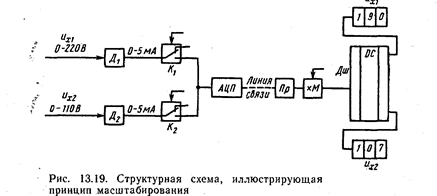
Измеряемое напряжение поступает на вход делителя напряжения, предназначенного для согласования уровня входного сигнала с входом АЦП. Преобразованное напряжение поступает на АЦП, с выхода которого часть двоичного кода, соответствующая первой посылке, сразу же подаётся на блок кодирования (блок логических устройств), а остальная часть – на триггеры, выступающие в роли регистра. Блок регистров предназначен для хранения двоичного кода в то время, когда выходы АЦП находятся в Z – состоянии, что позволяет осуществлять беспрерывную передачу. С выхода блока регистров двоичный код поступает на логический блок (блок кодирования), где происходит преобразование двоичного кода в неприводимый сменно-посылочный код. Сигналы с выхода логического блока поступают на блок преобразования в частоту логических сигналов, где находятся генераторы частоты, ключи включения генераторов, полосовые фильтры и сумматор. Колебания с выходов полосовых фильтров поступают на сумматор, с выхода которого в линию поступает выходной сигнал. Работой вышеперечисленных блоков управляет блок управления, который должен производить следующие операции:
запуск АЦП на преобразование;
управление передачей данных с АЦП;
управлять записью в регистры;
управлять очерёдностью выдачи в линию посылок.
5 Разработка и расчёт основных блоков схемы
5.1 Параметры НС – кода
Допустимая погрешность для АЦП определяется по следующей формуле:
=0,5доп ,(5.1)
=0,5*2.8 = 1.4%.
Количество уровней квантования АЦП (N):
N = 100/ + 1, (5.2)
N = 100/1.4 + 1 = 72.4 .
Поскольку такая разрядность не может быть достигнута то принимаем N=128.
Разрядность кодовой комбинации (n):
n = log2 N, (5.3).
n = log2 128 = 7.
Для преобразования комбинаций двоичного кода (ДК) в НС – код комбинации ДК разбиваются на n групп, число которых равно числу посылок НС – кода nв.
Комбинациям ДК каждой группы присваиваются комбинации частот из соответствующих групп сочетаний, образованных для построения посылок НС – кода .При разбиении разрядов ДК на группы, а так же при формировании комбинаций посылок НС – кода следует учитывать, что число возможных перестановок в группе (комбинаций ДК) не должно превышать количества комбинаций соответствующих посылок:
, (5.4)
где
Niгрдк – число комбинаций i – ой группы ДК;
Nnвi – количество комбинаций i – ой посылки НС.
Выбор числа частотных позиций nч для построения комбинаций посылок НС – кода производится из условия:
. (5.5)
Примем nв = 3 (nв – количество посылок).
Для преобразования семиразрядного ДК в НС – код , у которого nв=3 mч=2, количество необходимых комбинаций:
Nком 23+2*22 =16.
При nч= 7 Nком = 21,а при nч= 6 Nком = 15 ,поэтому будем использовать 7 частотных позиций.
Относительная скорость передачи определяется по следующей формуле:
, (5.6)
где
M – количество информации;
nч – количество частотных позиций;
nв – количество посылок.
По формуле (5.6) находим относительную скорость передачи:
Rf = 7/(7*3) =0.3(3).
Принимая nв = 2 и используем те же формулы.
Для преобразования шестиразрядного ДК в НС – код , у которого nв=2 , mч=2 количество необходимых комбинаций будет равно:
Nком 23 + 24 = 24.
При nч= 8 Nком = 28, поэтому используем 8 частотных позиций.
По формуле (5.6) находим относительную скорость передачи:
Rf = 7/(8*2) =0.43.
На основании вышеприведённых расчётов делаем вывод, что НС – код с параметрами nв = 2 , mч = 2 обеспечивает большую скорость передачи при небольшом затрате аппаратных ресурсов.
5.2 Выбор комбинаций НС – кодаНа основании вышеприведённых расчётов используем для передачи 8 частотных позиций, то возможно получение 28 комбинаций (Таблица 5.1)
Таблица 5.1
| 1-2 | 1-3 | 1-4 | 1-5 | 1-6 | 1-7 | 1-8 |
| 2-3 | 2-4 | 2-5 | 2-6 | 2-7 | 2-8 | |
| 3-4 | 3-5 | 3-6 | 3-7 | 3-8 | ||
| 4-5 | 4-6 | 4-7 | 4-8 | |||
| 5-6 | 5-7 | 5-8 | ||||
| 6-7 | 6-8 | |||||
| 7-8 | ||||||
Для построения кодовых комбинаций 1 – ой посылки нужно использовать 16 комбинаций частот, а для 2-ой посылки 8 комбинаций частот.
По расчётам проведённым ранее необходимо использовать восемь частот, а следовательно, для равномерного использования всех частот каждая частота для первой посылки должна использоваться четыре раза, а для второй два раза. Выбор частотных комбинаций следует производить при помощи карты Карно, потому что использование карт Карно позволит значительно оптимизировать представлении каждой кодовой комбинации для построения логического узла.
5.2.1 1 –я посылка
Ч
D0
D0
астота 1 и 2| 1 | 1 | 2 | 2 |
| D3 1 | 1 | 2 | 2 |
| D2 | |||
| |
D1
Частота 3 и 4
| 3 | 3 | 4 | 4 |
| 3 | 3 | 4 | 4 |
Частота 5 и 6
| 6 | 5 | 5 | 6 |
| 6 | 5 | 5 | 6 |
Частота 7 и 8
| 8 | 7 | 7 | 8 |
| 8 | 7 | 7 | 8 |
Исходя из данных по картам Карно получаем функции для частот приведённые в таблице 5.2.1.1.
Таблица 5.2.1.1
| Частоты | Функции |
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 |
Исходя из выше приведенных функций получаем комбинации частот для первой посылки приведенные в таблице 5.2.1.2:
таблице 5.2.1.2
| код | 0000 | 0001 | 0010 | 0011 | 0100 | 0101 | 0110 | 0111 | 1000 | 1001 | 1010 | 1011 | 1100 | 1101 | 1110 | 1111 |
| част. | 1-8 | 2-8 | 1-7 | 2-7 | 3-8 | 4-8 | 3-7 | 4-7 | 1-6 | 2-6 | 1-5 | 2-5 | 3-6 | 4-6 | 3-5 | 4-5 |
5.2.2 2-ая посылка
Частота 1 и 2
| 1 | 1 | ||
| 2 | 2 |
Частота 3 и 4
| 3 | 4 | ||
| 3 | 4 |
Частота 5 и 6
D0
| 5 | 5 | ||
| D2 | 6 | 6 |
D1
Частота 7 и 8
D0
| 7 | 8 | ||
| D2 | 7 | 8 |
D1
Аналогично определяем комбинации и для второй посылки.
Получаем следующие функции (таблица 5.2.2.1).
Таблица 5.2.2.1
| Частоты | Функции |
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 |
Конечные значения кодовых комбинаций для второй посылки приведены в таблице 5.2.2.2.
таблице 5.2.1.2
| код | 000 | 001 | 010 | 011 | 100 | 101 | 110 | 111 |
| част. | 1-3 | 5-8 | 1-4 | 5-7 | 2-3 | 6-8 | 2-4 | 6-7 |
Так как разрядность кода равна 7, то для удобства использования и простоты подключения выбираем микросхему КР572ПВ3. Микросхема представляет собой восьмиразрядный АЦП последовательных приближений, предназначенный для ввода аналоговой информации в микропроцессоры, микроЭВМ и другие устройства вычислительной техники и обеспечивает следующие режимы: сопряжения, статической памяти и с произвольной выборкой. Условное обозначение приведено на рисунке 5.3.1
A/D
BUSY
DB1
DB2
DB3
DB4
DB5
DB6
DB7
DB8
Рисунок 5.3.1
В данной схеме АЦП будет работать в режиме статической памяти. На рисунке 5.3.2 изображена временная диаграмма работы АЦП в этом режиме, а в таблице 5.3 указаны состояния выходов АЦП и текущее функциональное состояние АЦП в зависимости от комбинации сигналов на входе.
Рисунок 5.3.2
Таблица 5.3
| CS | RD | BUSY | DB7—DB0 | Функциональное состояние АЦП |
| L | H | H | Z | Начало преобразования |
| L | ? | H | Z –данные | Считывание данных |
| L | ? | H | Данные -- Z | Сброс |
| H | X | X | Z | Отсутствие выборки |
| L | H | L | Z | Преобразование |
| L | ? | L | Z | Преобразование |
| L | ? | L | Z | Запрещено |
Основные параметры АЦП:
| Входное напряжение(максимальное) | 10В |
| Номинальное напряжение питания (вывод 1) | 5В |
| Ток потребления по входу (по выводу 1) | 4мА |
| Опорное напряжение (вывод 2) | - 10B |
| Выходное напряжение низкого уровня | 4B |
| Частота внутреннего тактового генератора | 0,4..1,5Мгц |
| Время преобразования |
Похожие работы
... передачи Тц = 2,2 сек определяется расчетное значение частоты мультивибратора: , где k - коэффициент, учитывающий отношение периода колебаний мультивибратора передающего полукомплекта к периоду колебаний мультивибратора приемного полукомплекта k = 1. , так как при расчете мультивибратора, работающего совместно с триггером делителем частоты, расчетное значение его частоты удваивается и ...
... 1) большая помехоустойчивость и, как следствие этого, возможность передачи телеизмерения на большие расстояния, особенно при ис- , пользовании помехозащищенных кодов; 2) большая точность телеизмерения. Погрешность в кодоимпульсных системах возникает при преобразовании измеряемой величины в код. Точность преобразователей, преобразующих измеряемые величины в код, может быть меньше 0,1 %,т. е. ...
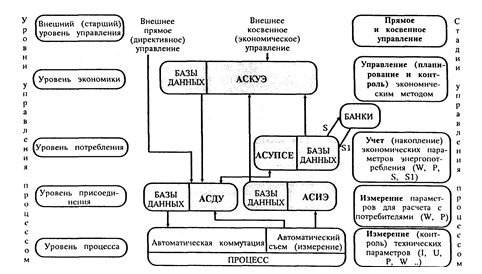

... разных этапах производства (потребления) электроэнергии. Основная цель создания таких систем – дальнейшеё повышение эффективности технических и программных средств автоматизации и диспетчеризации СЭС для улучшения технико-экономических показателей и повышения качества и надёжности электроснабжения ПП. Реформирование электроэнергетики России требует создания полномасштабных иерархических систем ...

... источника. Разумеется, для правильного выбора кода надо знать информационные характеристики источника сообщений и характеристики используемого канала связи. Физические характеристики канала и сигнала. Обычно телемеханические сигналы передаются посылками электрического тока по проводным линиям связи, но иногда используется и радиоканал. В обоих случаях перенос электромагнитной энергии сигналов ...
0 комментариев