Анализ требований, предъявляемых к автономным системам электропитания с учётом обеспечения электромагнитной совместимости (ЭМС).
Проблемы электромагнитной совместимости устройств силовой электроники с техносферой связаны как с усилением обратного влияния полупроводниковых преобразователей на питающую сеть в связи с их непрерывно расширяющимся распространением, так и с ростом требований к качеству электроэнергии из-за роста числа ответственных потребителей, чувствительных к некачественности электрической энергии. [ 1, 2, 3, 4, 9 ]
В настоящее время происходит интенсивный рост числа электронной аппаратуры, функционирование которой сопровождается потреблением из сети импульсного тока и, как следствие, генерацией в сеть высших гармонических составляющих, способных вызвать повреждение электрооборудования или его неправильное функционирование. В связи с этим должны быть решены задачи:
· определение требований к качеству электроэнергии, используемой при работе различного рода потребителей;
· обеспечение этих требований при создании и эксплуатации устройств, систем и комплексов. [ 5, 6, 7 ]
Определение требований к качеству электроэнергии осуществляется разработчиками аппаратуры и обуславливается точностью устройств. По мере усложнения задач, решаемых электронной аппаратурой, происходит повышение требований к ее точности, и следовательно, к качеству электроэнергии.
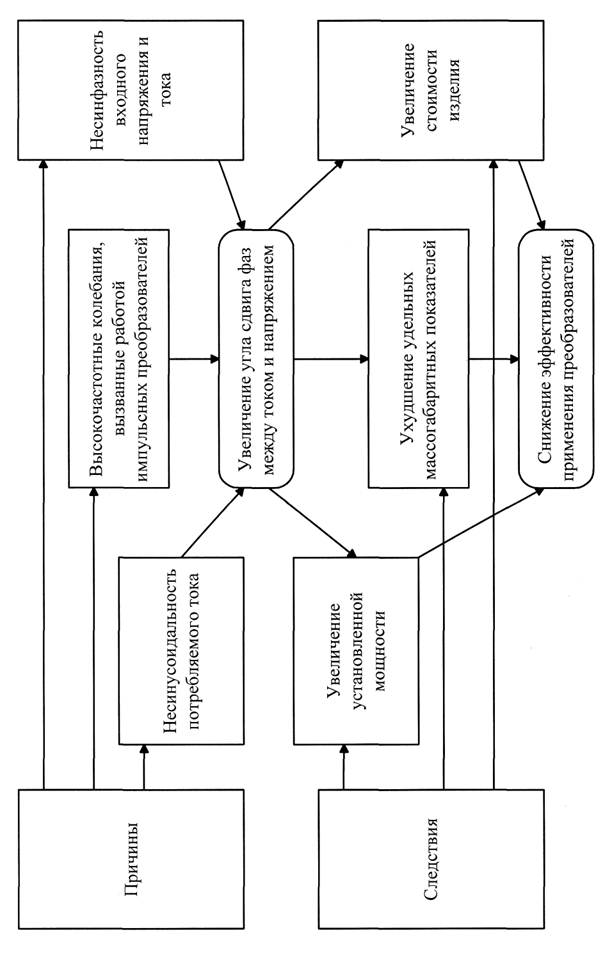
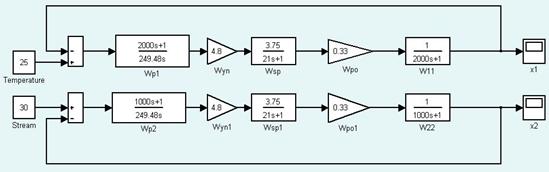
Взаимосвязь электромагнитных процессов в преобразователях и их влияние на технико-экономические показатели аппаратуры показаны на рис. 1.1.
Для устройств автоматики и вычислительной техники эти требования сводятся в основном к стабильности напряжения питания в статических и динамических режимах.
Обеспечение требуемой стабильности напряжения питания производится за счет разработки соответствующих полупроводниковых преобразователей энергии. Повышение требований к стабильности напряжения приводит к усложнению схем преобразователей, что вызывает ухудшение массогабаритных, энергетических и других показателей.
Особо сложной и трудноразрешимой задачей является задача обеспечения стабильности напряжения в автономных подвижных объектах, где всегда имеют место жесткие ограничения на массогабаритные показатели оборудования.
Развитие современных технологий характеризуется широким распространением автономных объектов, способных решать различные производственные задачи при разнообразных условиях эксплуатации. Как правило, подобные объекты оснащаются автономными системами электроснабжения.
В зависимости от характера функциональных задач, решаемых автономными объектами, их системы электроснабжения содержат ряд источников вторичного электропитания (ИВЭП) соответствующих видов энергии.
Вследствие того, что технические устройства, реализующие производственные технологии, предъявляют определенные требования к качеству энергии, то соответствующие ИВЭП снабжаются соответствующими регуляторами и образуют вместе с ними замкнутые динамические системы.
Так как проектирование динамической системы производится при условии обеспечения номинальных значений энергетических координат, то отклонение
|
|
![]()
последних при работе системы воспринимаются ею как возмущения, действующие на определенные элементы системы. Отклонение энергетических координат от номинальных значений в ряде случаев приводит к некоторому эквивалентному изменению динамических свойств системы.
Оба отмеченных фактора обуславливают изменение качества функционирования динамических систем и требуют разработки методов учета или устранения указанных явлений при проектировании подобных систем. Отклонение энергетических координат от номинальных значений в процессе работы технических устройств обусловлено ограничением по мощности соответствующих ИП. [2,7 ]
Известно [ 3 ], что повышение мощности ИП при прочих равных условиях практически всегда ведет к увеличению габаритов и массы соответствующего оборудования, повышению непроизводительных затрат энергии, (например увеличение потерь холостого хода) и следовательно, к ухудшению общего КПД энергооборудования. В силу указанных причин излишнее увеличение мощности ИП на автономных объектах и особенно на подвижных крайне нежелательно, поэтому мощность ИП автономных объектов на практике всегда ограничена и часто бывает соизмерима с мощностью приемников. Следствием ограниченности мощности ИП является зависимость значений их выходных координат от режима и характера работы нагрузки, которая, например, для источников электрической энергии определяется внутренним сопротивлением источника питания. В свою очередь характер и режимы работы приемников определяются режимами работы соответствующих динамических систем, в состав которых они входят.
Таким образом, при соизмеримости мощности ИП с мощностью приемников, с одной стороны, происходит влияние режимов работы динамических систем на характер изменений и значения выходных (энергетических) координат ИП, с другой стороны, следствием отклонений энергетических координат ИП от их номинальных значений является
изменение (обычно ухудшение) качества функционирования динамических систем, получающих энергию от данного ИП.
Если от одного ИП получают энергию ряд динамических систем, то вследствие указанных факторов может возникнуть взаимное влияние между процессами в разных системах через общий ИП. Для устранения этого явления можно производить раздельное энергоснабжение различных систем от нескольких автономных ИП. Однако подобное решение проблемы в общем случае не всегда удовлетворительно, поскольку применение целого ряда автономных ИП одной и той же физической природы приводит к ухудшению массогабаритных и энергетических показателей качества электрооборудования.
Поэтому в настоящее время наиболее широкое распространение получили системы централизованного питания подвижных объектов, предполагающие использование одного общего ИП, от которого и получают энергию все системы подвижного объекта.
Так как в состав системы «ИП-ИВЭП-нагрузка», входят самые разнообразные технические устройства (ТУ) различные по своей физической природе и принципу действия, работа которых предполагает потребление энергии разных видов и номиналов, то системы энергоснабжения по необходимости должны содержать преобразующие устройства, обеспечивающие получение энергии требуемого рода и качества.
Таким образом, система централизованного энергоснабжения, кроме первичного источника питания (ИП), содержит ряд преобразователей энергии, снабженных регуляторами соответствующих выходных (энергетических) координат, являющихся по существу замкнутыми регулируемыми динамическими системами.
Поскольку число приемников электроэнергии обычно велико и они расположены некомпактно, то между ИП и нагрузкой необходимо организовать распределительную сеть, включающую в себя устройства передачи энергии,
устройства коммутации каналов ее передачи и ряд вспомогательных устройств (фильтры, ограничители, датчики контроля, индикации).
Таким образом, первичные ИП совместно с распределительной, коммутационной регулирующей аппаратурой и всеми преобразователями энергии, образуют систему электроснабжения (СЭС), от которой получают энергию все потребители.
Современное судно (корабль) с позиций системного анализа представляет собой сложную иерархическую структуру, состоящую из большого числа подсистем и комплексов, значительная часть которых характеризуется высокой степенью автоматизации.
К современным судовым системам автоматики и вычислительным комплексам предъявляется ряд требований, важнейшие из которых определяются статическими, динамическими и массогабаритными показателями. Кроме того, судовые системы должны удовлетворять требованиям ЭМС.
Радиоэлектронная аппаратура на большинстве судов и кораблей получает питание не от основной электростанции, а от специальных преобразователей электроэнергии. Основные причины такого технического решения две [ 5 ].
Первая заключается в том, что параметры электроэнергии для питания радиоэлектронных систем отличаются от стандартных параметров силовой электрической сети.
Вторая причина состоит в том, что РЭА является нелинейным потребителем и потому искажает форму кривой напряжения. В процессе развития как микроэлектроники, так и силовой электроники несовместимость по цепям питания увеличивается. С одной стороны, миниатюризация электронных схем преобразования сигналов все более снижает уровень сигналов, делая схемы более критичными к качеству питания. С другой стороны, в силовой электронике ускоренно развиваются тиристорные и
транзисторные преобразователи электроэнергии с высокочастотным преобразованием ее параметров.
Проблема снижения сложности и стоимости системы электропитания РЭА привела к увеличению числа потребителей, питающихся от одного вторичного щита с преобразователем. Появились индивидуальное и централизованное электропитание спецпотребителей.
Развитие систем электропитания РЭА идет, в основном, в двух направлениях: замена электромашинных преобразователей статическими и перевод на питание непосредственно от шин ГРЩ электростанции.
Результатом комплексной автоматизации корабельных
электроэнергетических систем стало появление на кораблях нового класса потребителей электроэнергии - комплексных систем управления (КСУ), что привело к созданию специальных систем централизованного электропитания СЦП. Произошло развитие СЦП от чисто защитно-распределительных систем до систем силовой электроники, предназначенных для реализации бесперебойного электропитания специфической электронной нагрузки. Отмеченное позволяет считать системы централизованного электропитания (СЦП) отдельной частью корабельной электротехнической системы (КЭТС). Корабельные СУ ЭЭС по существующей классификации относятся к классу систем управления функциональным комплексом технических средств автономных электроэнергетических систем.
Применение в корабельных ЭЭС существенно нелинейных нагрузок (например «ДПТ-УВ») является одним из существенных факторов, влияющих на результаты работы измерительных цепей СУ ЭЭС.
Более 60% всей вырабатываемой в мире электрической энергии потребляется электрическими двигателями различных типов общепромышленного и судового назначения. Современные судовые системы, устройства и технологии требуют от электропривода повышенной точности
движения, быстродействия, надежности, понижения вносимых системой «преобразователь-двигатель» искажений в сетевое напряжение.
Развитие электроники, создание новых полупроводниковых преобразователей сделали возможным решение поставленных выше задач. Использование нового поколения силовых полупроводниковых приборов типа IGBT, GТО и др. в системах регулируемого электропривода позволяет улучшить массогабаритные показатели устройств управления и существенно повысить технико-экономические показатели электроприводов.
В настоящее время [ 2, 3, 5, 6, 8, 10 ] проявляется большой интерес к решению этих задач с помощью импульсного управления потоком электроэнергии на высокой частоте.
Похожие работы
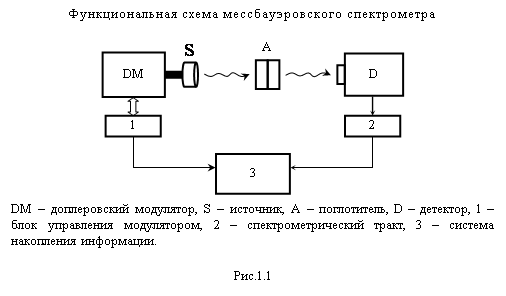
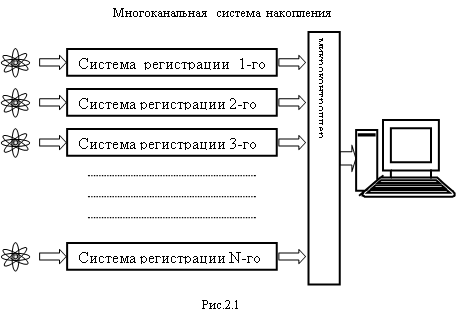
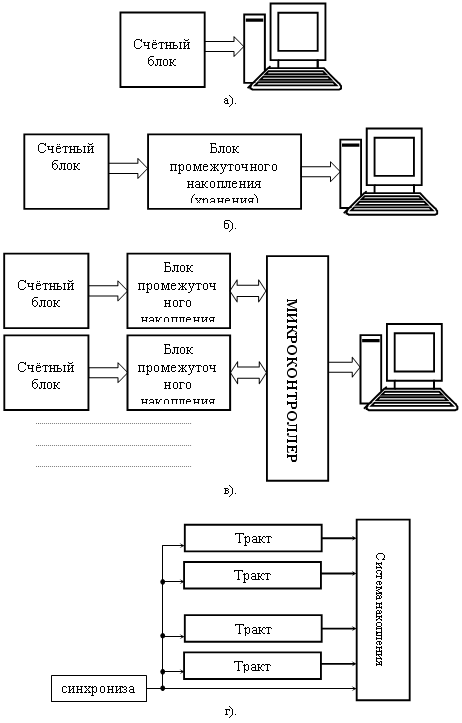
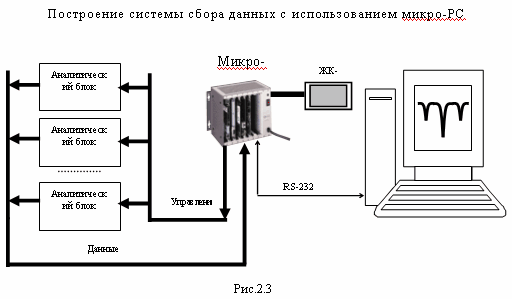
... программирование микроконтроллера, как инструмента накопления данных и управления ресурсами, с учётом необходимой и достаточной степени доступа к конечной аппаратуре. Модуль накопления для задач многомерной мессбауэровской спектрометрии спроектирован с учётом следующих условий: - Синхронизация накопителя с системой доплеровской модуляции осуществляется внешними тактовыми импульсами “старт” и ...
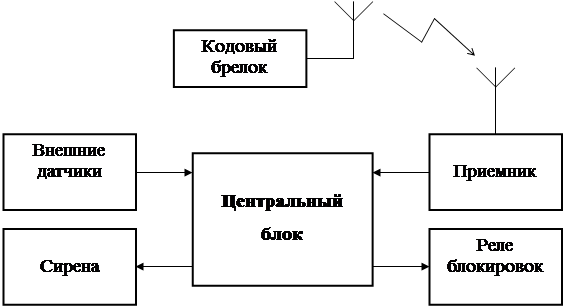
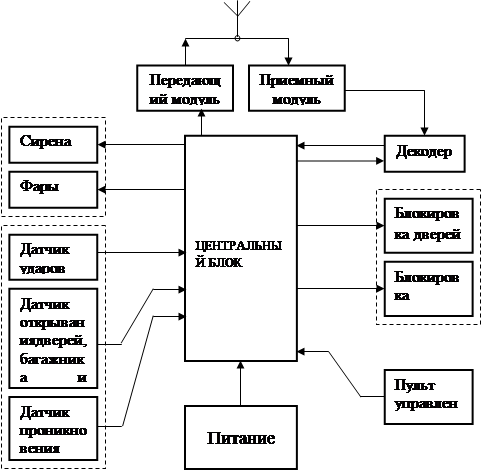
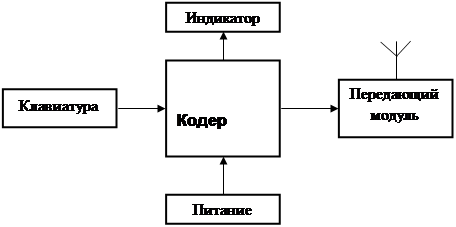
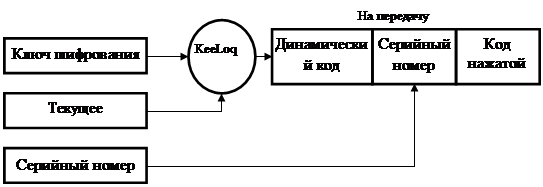
... , элементы питания – 2400 мм2) высота пульта управления с учётом ширины корпуса будет равна 10 мм. 7. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ 7.1 Характеристика проекта Проектируемая система представляет собой систему охранной сигнализации автомобилей. В разрабатываемой системе будут реализованы функции, как автономной охраны, так и централизованной. Так, например, она будет в режиме «Тревога» ...
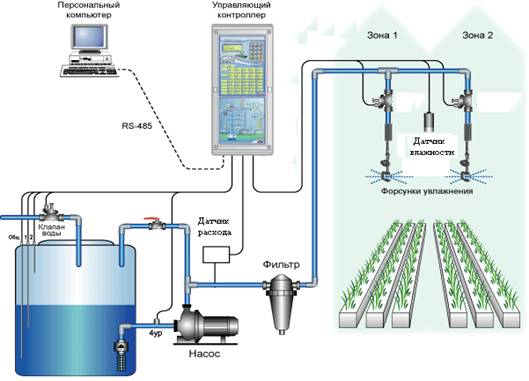
... управления осуществляется с помощью автоматизированного модуля верхнего уровня, который также отвечает за интерфейс на посту оператора. 3.1 Требования к структуре системы Автоматизированная система управления и контроля климата в тепличных хозяйствах выполнена на базе микропроцессорной техники. По иерархическому принципу АСУ ККТХ должна подразделяться на уровни: нижний уровень: - ...
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
0 комментариев