ИДЕНТИФИКАЦИЯ И МОДЕЛИРОВАНИЕ ТЕХНОЛОГИЧЕСКИХ ОБЪЕКТОВ
Идентификация параметров электромеханической системы
Введение
Цель работы: приобрести навыки определения постоянных времени системы по переходной характеристике.
Дано:
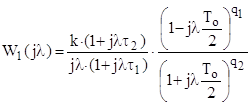
-передаточную функцию электромеханической системы:
 ;(1)
;(1)
-постоянные времени Т1=1, Т2=10;
-уравнения изменения скорости двигателя постоянного тока W(t):
 ;(2)
;(2)
где  - относительное время процесса;
- относительное время процесса;
- коэффициент, который характеризует степень расхождения постоянных времени Т1 и Т2;
 - коэффициент демпфирования;
- коэффициент демпфирования;
Тм, Тя - электромеханическая и электромагнитная постоянные времени двигателя соответственно, причем Тм=Т2 в уравнении (1).
Ход работы
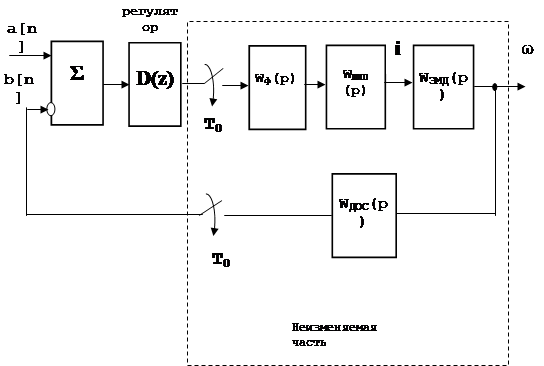
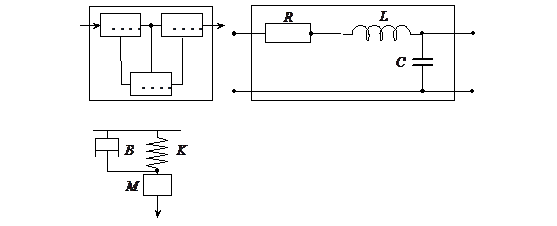
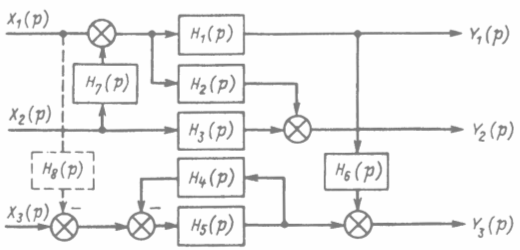
1. Соответственно заданных данных и передаточной функции системы строим функциональную схему системы, используя среду Matlab. Схема представлена на рисунке 1.
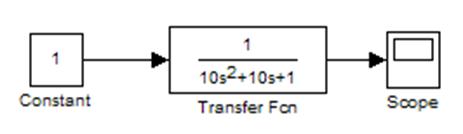
Рисунок 1 - Функциональная схема.
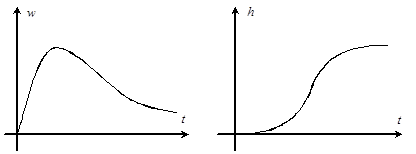
2. График переходного процесса представленный на рисунке 2.
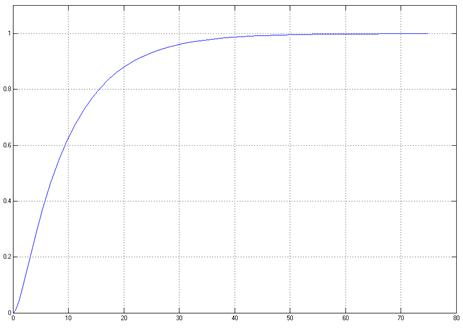
Рисунок 2 - График переходного процесса.
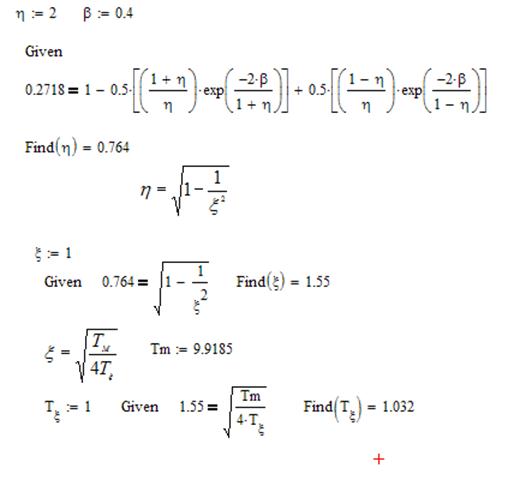
По графику переходной функции (рисунок 2) определим время t1 при ![]() получили t1=11.95.
получили t1=11.95.
Вычисляем ТМ с помощью формулы
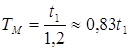 ,
,
получили ТМ= 9,9185, ![]() .
.
3. При ![]() , необходимо определить из графика
, необходимо определить из графика ![]() и решить уравнение (2) относительно h, а потом определить
и решить уравнение (2) относительно h, а потом определить ![]() . Получили значение
. Получили значение ![]()
4. Рассчитываем значение Тя
5. Определим ошибки идентификации за формулами:
![]() и
и 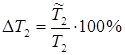
![]()
![]()
Выводы: в ходе работы было определено постоянные времени по переходной характеристике, установлен что коэффициент, который характеризует различие постоянных времени не влияет на относительное время при разгоне двигателя к заданному единичному уровню, экспериментально получении значения постоянных времени почти совпадают с заданными.
Моделирование нелинейных объектов
Цель работы: Приобрести навыки моделирования нелинейных объектов. А также анализа их влияния на точность системы
Исходные данные:
тип двигателя: ПБВ 132;
номинальный момент: 35 Н·м;
номинальная скорость: 600 об/мин;
номинальная мощность: 2,2 кВт;
номинальное напряжение: 53 В;
номинальный ток: 50 А;
максимальный момент: 350 Н·м;
максимальная скорость: 2000 об/мин;
момент инерции якоря: 0,188/0,1901 кг/м2;
максимальное теоретическое ускорение: 1860 м/с2;
электромеханическая постоянная времени: 14,2 мс;
электромагнитная постоянная времени: 7,35 мс.
величина люфта: 2b=0.004.
Теоретические сведения
Люфт в кинематических передачах приводов подач станков может вызывать потерю устойчивости системы управления и ухудшение динамических показателей. Кроме этого он вызывает искажение траектории контурного движения и снижает точность обработки.
Структура механизма с нелинейностью типа «люфт» содержит нелинейный элемент, геометрическая модель которого описывается соотношениями:
![]() при
при ![]() ,
,
где Х – входная величина нелинейного звена; ХН – выходная величина нелинейного звена; 2b – величина люфта.
Ход работы:
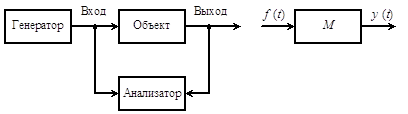
С применением пакета Matlab составляем модель электромеханической системы, схема которой представлена на рисунке 1.
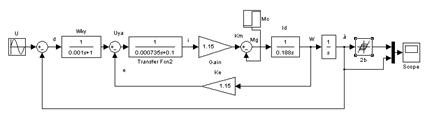
Рисунок 1 – Схема электромеханической системы в среде Matlab
Расчёты всех коэффициентов используемых в электромеханической системе, произведенные при помощи пакета MathCAD, приведены ниже.
Активное сопротивление якоря:

Конструктивный коэффициент:
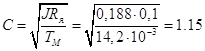 .
.
Определяем параметры входных воздействий:
Амплитуда входного воздействия ![]() , пусть
, пусть
А=1;
Частота входного воздействия
 ,
,
принимаем
![]() .
.
Входное воздействие будет иметь вид:
![]() .
.
Эпюры сигналов на входе и выходе звена модели с нелинейным элементом типа «люфт», полученные при помощи пакета Matlab, изображены на рисунке 2.
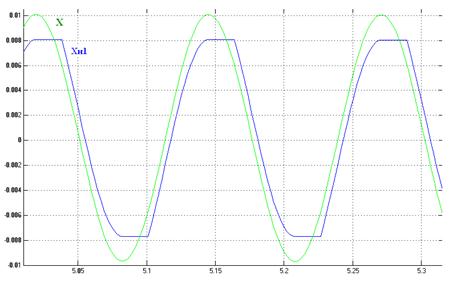
Рисунок 2 – Графики сигналов на входе и выходе звена типа «люфт» в среде Matlab
При моделировании систем с нелинейностями типа «люфт» нелинейное звено заменяется эквивалентным звеном с передаточной функцией
![]()
которая называется гармонической передаточной функцией нелинейного звена.
Коэффициент передачи нелинейного звена и фазовая характеристика определяются выражениями:
![]()
 .
.
Коэффициенты гармонической линеаризации в функции ![]() , характеризующие соотношения амплитуд синфазной
, характеризующие соотношения амплитуд синфазной ![]() и квадратурной
и квадратурной ![]() составляющих первой гармоники выходного сигнала ХН1 к амплитуде А сигнала на входе Х:
составляющих первой гармоники выходного сигнала ХН1 к амплитуде А сигнала на входе Х:

Тогда передаточная функция примет вид:
![]() .
.
Модель замены люфта линейным элементом в среде Matlab изображена на рисунке 3.
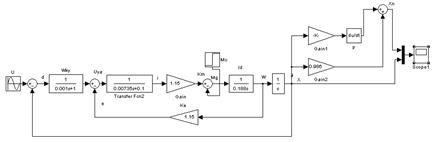
Рисунок 3 – Схема модели замены люфта линейным элементом
Полученные эпюры сигналов на входе в линейное замещённое звено типа «люфт» и на его выходе изображены на рисунке 4.
|
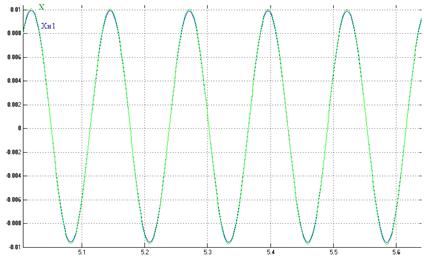
Рисунок 4 – Графики сигналов на входе в линейное замещённое звено типа «люфт» и на его выходе
Составим модель компенсации люфта и проведём её исследование, схема модели в среде Matlab изображена на рисунке 5.
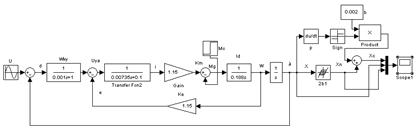
Рисунок 5 – Схема модели компенсации люфта в среде Matlab
Полученные эпюры сигналов на входе (выходе) звена типа «люфт» и после компенсации изображены на рисунке 6.
|
|
|
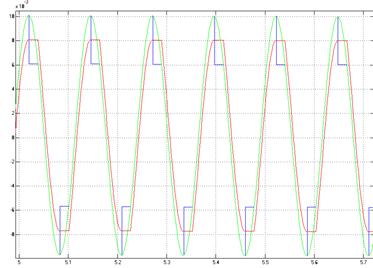
Рисунок 6 – Графики сигналов на входе звена типа «люфт» и после компенсации в среде Matlab
Выводы: в ходе лабораторной работы я приобрел навыки моделирования нелинейного объекта типа «люфт», проанализировала их влияние на точность системы, составила и исследовала модель для компенсации люфта.
Оптимизация параметров пид-регуляторов для объектов управления с нелинейностями
Цель работы: освоение пакета прикладных программ Nonlinear Control Design (NCD) Blockset системы MATLAB для автоматической настройки параметров моделируемых систем электроприводов в условиях ограничений.
Индивидуальное задание:
Коэффициенты передаточной функции:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Неопределенный параметр ![]() в диапазоне 0,2…0,5.
в диапазоне 0,2…0,5.
Желаемые параметры качества переходного процесса δ=±5%; σ=1,2; tпп=1,5 с
Ход работы
Передаточная функция объекта (электропривода):
![]()
Коэффициент интегральной составляющей:
![]() .
.
Коэффициент дифференциальной составляющих:
![]() .
.
Пропорциональная составляющая (предельное значение):
![]() .
.
Строим исследуемую схему в среде MatLab.
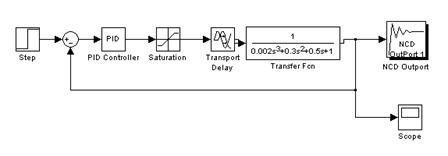
Рисунок 1 – Структурная схема модели для оптимизации ПИД-регулятора
Графики переходного процесса с оптимизированными параметрами ПИД-регулятора, представлены на рисунках 3-4.
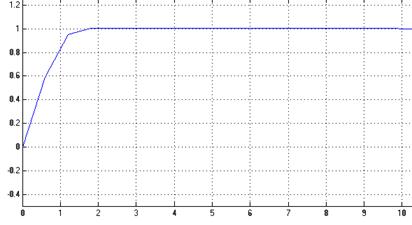
Рисунок 3 – График переходного процесса для заданной модели (Scope)
Параметры системы при оптимизации:
Start time: 0 Stop time: 60.
There are 2405 constraints to be met in each simulation.
There are 3 tunable variables.
There are 1 simulations per cost function call.
Creating a temporary SL model tp484964 for computing gradients...
Creating simulink model tp484964 for gradients...Done
f-COUNT MAX{g} STEP Procedures
7 -0.01 1
14 -0.01 1 Hessian modified twice
15 -0.01 1 Hessian modified twice
Optimization Converged Successfully
Active Constraints:
1203
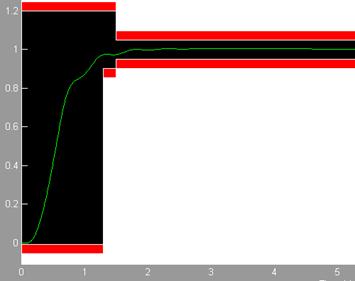
Рисунок 4 – График переходного процесса для заданной модели (NCDOutPort)
Вывод: в ходе лабораторной работы я изучил пакет прикладных программ Nonlinear Control Design (NCD) Blockset системы MATLAB для автоматической настройки параметров моделируемых систем электроприводов в условиях ограничений, научился решать задачи оптимизации при наличии ограничений какого-либо коэффициента системы.
Похожие работы
... в системе управления, тех параметров, которые невозможно зарегистрировать измерительными приборами. В данной курсовой работе производится идентификация параметра зазора при регулировании положения. Созданная подсистема идентификация, позволяет выявить влияние зазора и сделать это влияние минимальным на вид переходного процесса. Переходные процессы в цифровых электроприводах получаются ...
... цепи W1(s) = Wp(s) представлено как параллельное соединение простейших звеньев. 2.9 Неопределенность моделей систем управления Математические модели не отражают исчерпывающим образом динамические свойства систем управления в силу идеализации и упрощений, неизбежных при моделировании, неточной реализации алгоритмов управления и изменений характеристик объектов и других элементов в ...
... , а 3 формируется путем умножения построчно колонок 1 и 2. Модель в абсолютных единицах после определения коэффициентов записывается в виде Динамическая идентификация Многие технологические объекты управления, функционирование которых в динамике еще недостаточно изучено, не могут быть описаны аналитически. Для получения их динамических моделей также применяются экспериментальные методы. ...
... данных, реализующую выделенный бизнес-процесс; 9. анализ современного состояния развития технологий разработки бизнес моделей и промышленных технологий проектирования ПО. Тема дипломной работы «Построение модели основных бизнес процессов на предприятии», является, несомненно, актуальной, так как задача такого типа решается на любом предприятии. База данных позволит вести учет поставок, сбыта, ...
0 комментариев