Федеральное агентство по образованию
ГОУ ВПО «Сибирский государственный индустриальный университет»
Кафедра автоматизированного электропривода и промышленной
электроники
Курсовой проект
ИДЕНТИФИКАЦИЯ ТЕХНОЛОГИЧЕСКИХ ОБЪЕКТОВ УПРАВЛЕНИЯ
Новокузнецк, 2010г.
ЗАДАЧИ ИДЕНТИФИКАЦИИ
Объективные закономерности, присущие процессам переработки информации, обусловливают аналогию функциональных структур человека-оператора и управляющего устройства любого типа. Эта аналогия распространяется не только на перечень этапов переработки информации, но и на их содержание. Чтобы управлять технологическим объектом, управляющее устройство должно располагать информацией о его свойствах и состоянии в данный момент времени. Эти данные обеспечиваются введением в управляющее устройство априорной и текущей информации, объем которой зависит от сложности объекта и задач, им выполняемых. Любой объект рассматривается как система с входа ми и выходами. В том числе технологический объект можно представить как систему, входными исполнительными устройствами которой являются различного рода исполнительные приводы с передаточными устройствами, а выходными - параметры технологического процесса. В этом случае управляющее устройство должно вырабатывать воздействия на входы технологического объекта, так чтобы выходные технологические параметры для обеспечения требуемого качества выпускаемой продукции принимали заданное или оптимальное значение и не превышали допустимых значений. Это значит, что управляющие воздействия и их последовательность должны формироваться управляющим устройством с учетом особенностей технологического объекта, его состояния и тем самым обеспечивать необходимое целенаправленноe протекание технологического процесса. Следовательно, для высококачественного управления технологическим объектом необходимо знать связи (закономерности), существующие между его входными и выходными управляемыми величинами. Такие связи между выходами и входами объекта, представленные формализовано, носят название модели или алгоритма функционирования объекта. Без такой формальной модели объекта невозможна разработка целенаправленного управления им. Чем универсальнее, точнее модель технологического объекта, тем эффективнее и результативнее можно осуществить управление.
Принципы и методы получения и представления формальных моделей объекта, а также сам процесс получения таких моделей называются идентификацией.
В "Системе автоматического управления электроприводами" и других известны примеры аналитических моделей элементов автоматизированного электропривода: переходные и частотные характеристики систем электропривода и двигателей, зависимости выходного напряжения тиристорных преобразователей от угла управления тиристорами и т.п. Обычно это одномерные объекты, имеющие один вход и один выход, чаще всего линейные, детерминированные, т.е. обладающие неизменным во времени характером и параметрами преобразования входной величины в выходную. Одному объекту может соответствовать несколько моделей, отражающих разные стороны функционирования, но может существовать универсальная модель, описывающая различные объекты одним аналитическим выражением. Например, формула механической характеристики электропривода отражает связь между скоростью и моментом в статике, а дифференциальное уравнение или передаточная функция представляет собой модель объекта в динамике.
Однако современные технологические объекты — это объекты, имеющие несколько входов выходов, взаимовлияющих друг на друга, связанных нелинейными зависимостями со случайными возмущения ми. Возможно, сочетание непрерывно меняющихся входных и выходных величин и дискретных операций. Такие объекты требуют не только непрерывного изменения самих технологических операций, но и соблюдения определенной заданной последовательности, смены этих операций, а также учета аварийной ситуации объекта.
Для объектов, требующих оптимального управления, используется специфический тип модели — целевая функция, представляющая зависимость критерия качества функционирования объекта от его входных воздействий. Многообразие объектов обусловило появление различных методов получения моделей, а также форм их представления. Применяются аналитические и экспериментальные методы получения моделей, которые могут быть представлены в виде аналитических выражений, таблиц, графов, циклограмм и др. Для сложных объектов, подверженных случайным возмущениям различного характера в непрогнозируемых сочетаниях и последовательности, разрабатываются стохастические модели, в которых исходные величины, интервалы времени и параметры преобразования заданы законами распределения и статистическими характеристиками.
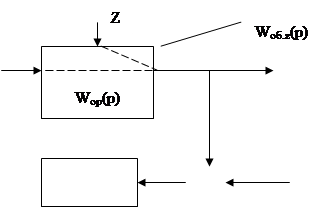
Применительно к технологическим объектам возникают специфические проблемы определения границ идентифицируемого объекта и оценки качества модели. Границы идентифицируемого объекта определяются, во-первых, детально сформулированной целью, т.е. перечнем всех технологических параметров, поведение которых влияет на качество продукции, и, во-вторых, перечнем внешних факторов в той или иной степени влияющих на основные технологические Обычно при идентификации для удобства построения моделей идут по пути расчленения модели объекта на математически однородные элементы или типовые звенья. После такой декомпозиции синтез моде ли исследуемого объекта сводится к синтезу структуры и параметров оператора Фм, преобразующего многомерные векторы входных управляющих Хм и возмущающих ZM воздействий в вектор управляемых выходных координат YM с требуемым уровнем адекватности параметры.
![]()
![]() 3.1
3.1
При идентификации по управляющим входам полагают возмущающие воздействия равными 0, т.е. получают модель в виде первого члена правой части (3.1). Оценка качества модели может производиться путем анализа ее адекватности объекту, в частности путем вычисления суммы квадратов отклонений данных расчета на модели Ym и результатов эксперимента на объекте у0:
При синтезе модели стремятся достигнуть соотношений I = Imin или I = Iдоп Если эти условия не удовлетворяются, то модель чрезмерно упрощена и необходимо выбрать другой ее тип. Если Iдоп не зада но, то применяются специальные методы оценки адекватности модели объекту.
Кроме требований точности формальные модели (алгоритмы функционирования) должны, как правило, удовлетворять следующим требованиям:
- определенности — модель должна исключать различные варианты ее толкования;
- массовости - модель должна быть пригодной для широкого диапазона численных значений исходных данных;
- результативности - она должна позволять выполнять расчет с использованием известного математического аппарата;
- надежности — модель должна обеспечивать с течением времени требуемую точность совпадения данных, полученных с использованием модели и эксперимента.
Многообразие технологических процессов не позволяет дать конкретные рекомендации по выбору методов разработки моделей различных технологических объектов.
Если возможен перенос возмущений к выходу модели, то указанное соотношение записывается в виде наиболее часто используемые приемы разработки
АНАЛИТИЧЕСКИЕ МЕТОДЫ ПОЛУЧЕНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ТЕХНОЛОГИЧЕСКИХ ОБЪЕКТОВ
Модели элементов
Аналитические методы традиционны при рассмотрении формальных моделей элементов электропривода и в связи с этим наиболее знакомы студентам. Они базируются на знании фундаментальных закономерностей электромеханического преобразования энергии. Аналогичный под ход возможен и при использовании гидравлических и пневматических приводов, он может быть распространен на элементы рабочего технологического оборудования.
Любая сложная силовая структура, состоящая из нескольких контуров, в которых происходит преобразование энергии из одного вида в другой, может быть разбита на отдельные элементы. Каждый из них осуществляет получение энергии, ее накопление, передачу другому элементу, расходование на полезную работу или рассеивание некоторой части энергии в виде потерь.
Знание природы элементов позволяет математически описать процессы преобразования энергии. Обобщив различные методики и формализовав связи одного элемента с другим, можно получить уравнения, описывающие процессы в сколь угодно сложных и разнородных силовых структурах технологических процессов. Рассмотрение только технологических процессов формообразования позволяет остановиться на системах с сосредоточенными параметрами и элементами.
Для получения обобщенных моделей элементов с сосредоточенными параметрами введем понятие разности потенциальных уровней U. Будем понимать под этим расход энергии на единицу преобразованного продукта. Введем также переменную количества Q — численную меру объема преобразуемого продукта. Произведение этих величин даст работу, необходимую для изменения на U потенциальных уровней количества продукта Q:
UQ = А.
Мощность, расходуемая на изменение потенциального уровня со скоростью dQ / dt, определяется соотношением

Для иллюстрации приведены уравнения электрической и механической цепей:
электрическая цепь:
Или
где q — заряд; R, L, С - активное сопротивление резистора, индуктивность катушки и емкость конденсатора, включенных в цепь;
механическая цепь:
или
где J — момент инерции;
θ,ω — угол и угловая скорость двигателя;
β = Мп /ω0 — жесткость механической характеристики двигателя;
к = M/a — жесткость кинематического звена. Второе слагаемое второго уравнения момента характеризует суммарный момент сопротивления Мс.
Элементы, связанные соединениями, в которых не происходит накопления и преобразования вещества или энергии, образуют структуру системы, отражающую технологический процесс преобразования этих видов продуктов. Для анализа такой структуры используются два закона: сумма расходов продукта в любом разветвлении равна 0:
сумма разностей уровней потенциалов в любом контуре равна 0:
 (3.2)
(3.2)
Решение уравнений типа (3.2) и (3.3) может дать принципиально разные результаты.
Если многоконтурная система имеет один вход и один выход, то система дифференциальных уравнений первого порядка, описывающих процессы в элементах, даст дифференциальное уравнение, порядок которого определяется числом накопителей энергии в системе.
Технологические объекты управления, как правило, являются многосвязными системами, имеющими несколько входов и выходов. Для них характерна зависимость каждого выхода от всех входов системы. Математическая модель такой системы представляет собой систему дифференциальных уравнений различного порядка, в левой части каждого из этих уравнений фигурирует одна из выходных переменных, а в правой — все входные. Для анализа подобных систем их математические модели обычно представляют в матричной форме.
Модели многосвязных систем
Для современных АСУ ТП характерно объединение в единую систему отдельных приводов и механизмов и даже объединение сложных технологических агрегатов в комплексно-автоматизированные технологические линии, гибкие автоматизированные производства. Примерами первых могут служить станки с ЧПУ, отрабатывающие при обработке детали сложные траектории и обеспечивающие оптимальный режим резания; примерами вторых — технологические линии прокатного производства. Основной особенностью таких систем является невозможность рассмотрения их как механической совокупности от дельных механизмов. Это обусловлено взаимосвязью и взаимовлиянием друг на друга управляемых технологических параметров.
Для обеспечения требуемого качества продукции необходимо одно временно управлять многими взаимосвязанными переменными (технологическими параметрами) путем непрерывного воздействия на различные исполнительные механизмы. В подобных системах изменение одного управляющего или возмущающего воздействия вызывает изменение нескольких управляемых переменных и наоборот - каждая управляемая переменная зависит от нескольких управляющих воз действий. Многосвязными являются большинство систем, у которых есть несколько возможностей управлять одним объектом, подверженным обычно нескольким внешним воздействиям. Подобные системы называют также многоканальными или многомерными.
В многоканальных системах в отличие от одноканальных входные воздействия и выходы объекта в каждый момент времени описываются как многомерные векторы, а сам объект — оператором А, пре образующим вектор входных воздействий X в вектор выходных переменных Y:
Y = АX. (3.4)
В этом случае можно говорить об аналогии между оператором А и передаточной функцией в одноканальных системах. В многоканальных системах решаются те же задачи, что и в одноканальных, т.е стабилизация, программное и следящее управление, оптимизация. Здесь также решается вопрос об устойчивости системы, качестве ее динамики. Представляя систему многомерной, необходимо уметь путем структурных преобразований упрощать внутреннюю структуру сложной системы, соединять ее с другими системами и т.д. Самостоятельной задачей является получение и представление формализованных моделей таких систем.
Основным физическим принципом, положенным в основу аналитических методов получения моделей многомерных объектов, является метод универсальных уравнений.
Записав уравнения по типу (3.2), получим, например, для установившегося режима трехсвязной линейной системы уравнения вида:
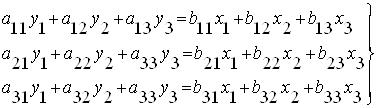 (3.5)
(3.5)
где х1,х2,х3 – входные, а у1,у2,у3 – выходные переменные; aij, bij – коэффициенты – вещественные числа, которые могут принимать также и нулевые значения.
При записи уравнений динамика структуры системы уравнений будет аналогичной (3.5), но вместо yi и xi будут фигурировать временные функции xi(t) и yi (t) или их операторные изображения xi(p) и yi (p), а вместо коэффициентов aij, bij– оперторные полиномы.
После решения системы уравнений (3.5) или ее динамического аналога она принемает вид:
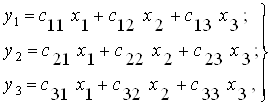 (3.6)
(3.6)
где ci — вещественный коэффициент для уравнений статики или передаточная функция для уравнений динамики.
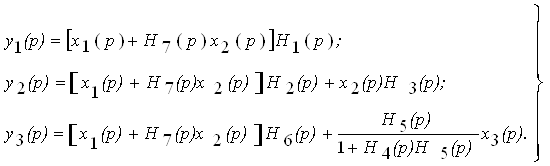
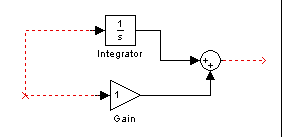
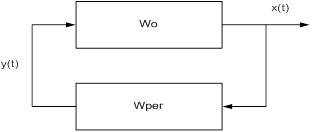
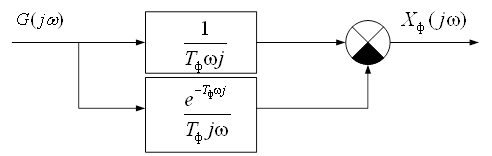
Модель системы в виде уравнений (3.5) или (3.6) может быть определена любой внутренней структурой, т.е. связи между каналами могут быть обусловлены непосредственным взаимодействием переменных, прямыми связями входа с различными выходами и обратными связями от выходов к входам. На рис. 3.1 приведена система, обладающая указанными свойствами. Эту систему можно описать следующими уравнениями:
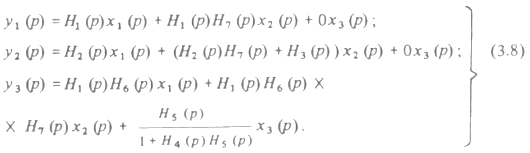
После преобразований система (3.7) принимает вид, аналогичный (3.6):
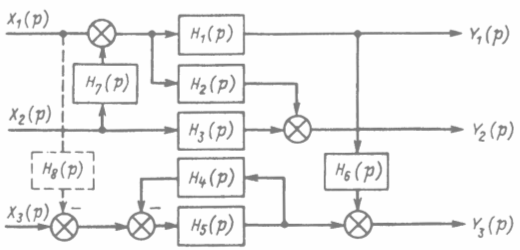
Рисунок 3.1 – Пример трехсвязной структуры
Как видно из изложенного, даже для относительно простой системы запись формальной модели получается весьма громоздкой. После приведения ее к виду (3.6) решать систему обычным способом становится сложно. С увеличением числа входов и выходов задача еще более усложняется.
Для получения более компактных и унифицированных форм представления моделей многомерных систем применяется матричная форма записи переменных и операторов преобразования.
Например, система (3.5) в матричной форме может быть представлена в виде
AY = ВХ, (3.9)
где X, Y - матрицы входных и выходных переменных; А, В - матрицы преобразований.
Система (3.6) принимает вид
Y = СХ. (3.10)
Под матрицами в данном случае понимается упорядоченная, т.е. выполненная по определенному правилу, табличная форма записи цифр, буквенных коэффициентов или передаточных функций и полиномов. Так, в (3.10) матрицы имеют вид:
Главное преимущество матричной формы записи заключается в том, что, составляя матрицы по определенным правилам, можно трансформировать в матричную форму не только запись переменных, но и операции над ними.
При наличии некоторых навыков операции над матрицами также легче воспринимаются, чем операции с множеством переменных. Математическое обеспечение современных ЭВМ располагает программами, ориентированными на унифицированное матричное представление задач анализа и синтеза многомерных систем, что позволяет широко применять для этих целей современную вычислительную технику.
Использование матричного представления объекта весьма эффективно при анализе и синтезе системы по динамическим показателям. Одним из наиболее современных методов анализа динамики много мерных систем является метод пространства состояний. Под переменными состояния и образуемым ими пространством состояний понимается совокупность величин, позволяющих по известным входным сигналам для t > t0 определить выходные сигналы для t ≥ t0.
В качестве переменных состояния могут приниматься как выходные переменные, так и их производные. Так, для одномерной системы, описываемой дифференциальным уравнением л-го порядка, переменными состояния будут значения у и (n – 1) производных в момент t = 0, позволяющие в дальнейшем при решении дифференциального уравнения классическим методом определить постоянные интегрирования.
Для многомерной системы понятие переменных состояния рассмотрим на примере электропривода с системой управления преобразователь - двигатель при действии на преобразователь двух управляющих воздействий и1 и и2. Динамическая модель такой системы имеет вид:
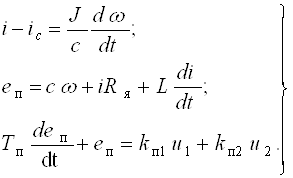 (3.11)
(3.11)
Выберем в качестве переменных состояния интересующие нас величины, приняв их выходами системы, и обозначим их

Запишем выражения для динамической модели объекта в виде системы дифференциальных уравнений в канонической форме:
 (3.12)
(3.12)
Применительно к примеру система будет иметь вид:
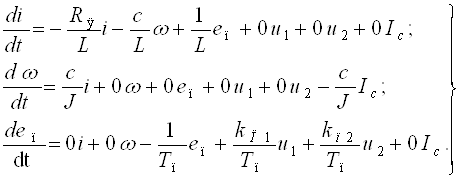 (3.13)
(3.13)
или в матричной форме
![]()
или, если раскрыть матрицы

Здесь Y(f) - столбец неизвестных выходных функций времени или переменных состояния; F (t) — столбец задающих (входных) функций времени; А, В — квадратные матрицы постоянных коэффициентов.
Сравнивая (3.14) с записью дифференциального уравнения первого порядка и располагая формулой его решения
И располагая формулой его решения

где τ — переменная интегрирования, можно доказать, что и для матричного выражения системы дифференциальных уравнений можно напирать аналогичное выражение для ее решения. Здесь матричная экспоненциальная функция еAt может быть представлена рядом системы уравнения вида:

Здесь матричная экспоненциальная функция еAt может быть представлена рядом:

Требуемые для получения временных функций суммирование и умножение матриц выполняются на ЭВМ по типовым программам.
Как и одномерные системы, многомерные решают задачи стабилизации совокупности параметров, программно-следящего их изменения или оптимизации.
Специфичным для многомерных систем является возможность неравенства числа входов и выходов, обычно пу ≤ пх, а также взаимовлияние каналов друг на друга. Формально это взаимовлияние представляется в виде перекрестных связей с передаточными функциями Н2 (р), Н6(р), Н7 (р) на рис. 3.1. Если они являются объективным проявлением природы управляемого объекта, они называются естественными. Если введены специально, например, для нейтрализации взаимовлияния — искусственными или корректирующими.
Например (рис. 3.1), для компенсации влияния y на y3 представ ленного в виде естественной связи с передаточной функцией Н6 (р), необходимо на вход х6 подать с входа Х корректирующую связь с передаточной функцией

Тогда выражение для уъ (р) в (3.8) примет вид
или

Здесь уъ становится независимым от х i.
Рассматривая систему (3.8), можно ввести понятие передаточной матрицы является собственными передаточными функциями. Они отражают зависимость выхода от "своего" входа; остальные (обозначим их L) являются несобственными. Тогда
![]()
где
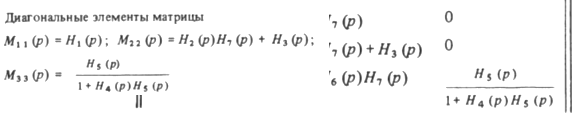
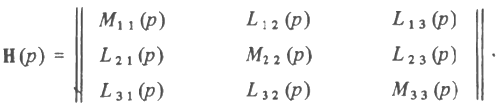
Очевидно, чтобы каналы стали автономными, передаточная матрица должна стать диагональной.
При частотных методах исследования если на один из входов подать гармонический сигнал частоты ω, то на всех выходах появятся гармонические сигналы той же частоты, но с разными амплитудами и фазами, т.е. может быть введено понятие собственной и несобственной амплитудно-фазовых характеристик.
Аналогично можно рассматривать переходную матрицу, отражающую временную реакцию выходов на единичные скачки на входах.
При построении сложных систем из многомерных звеньев, как и при использовании одномерных звеньев, очень удобны и наглядны структурные схемы из звеньев и связей между ними, которые изображаются двойными линиями.
Хотя наиболее универсальным подходом при анализе и преобразовании такой системы является совместное решение систем уравнений в матричной форме, возможны и привычные структурные преобразования. Правила преобразования и методы их обоснования в многомерных системах хорошо ассоциируются с одномерными, хотя и имеют свою специфику.
Для простоты рассмотрим преобразования с матричными звеньями одинакового размера, когда число входов равно числу выходов. Тогда при последовательном соединении матричных звеньев с передаточными функциями Н1(р) и Н2(р) эквивалентное звено описывается матрицей
При параллельном - матрицей
![]()
при антипараллельном – матрицей
![]()
где Е — единичная матрица.
Схожи и правила переноса точек ответвления и суммирования.
Самостоятельной проблемой многомерных звеньев и систем является выбор исходной модели, определяющей в дальнейшем число входов и выходов. По существу до выполнения анализа модели неизвестна значимость отдельных выходов для функционирования системы при решении поставленной перед ней задачи. До анализа модели трудно также оценить, все ли входы (исполнительные элементы технологического агрегата) существенно влияют на выбранные выходы (технологические параметры).
В этом плане выделяют полностью управляемые системы, когда все выходы зависят от всех входов, и полностью наблюдаемые, когда нет переменных состояния, не связанных с выходами.
ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ ПОЛУЧЕНИЯ МОДЕЛЕЙ ТЕХНОЛОГИЧЕСКИХ ОБЪЕКТОВ УПРАВЛЕНИЯ
Постановка задачи
Если для получения модели аналитические методы идентификации неприемлемы в связи с недостаточным знанием алгоритмов функционирования технологических объектов управления либо по причине сложности и экономической нецелесообразности разработки моделей на их основе, то применяются экспериментальные методы получения моделей технологических объектов управления. Модели, полученные на основе эксперимента, не столь универсальны, как аналитические, но более просты по своей структуре и позволяют применять однотипный математический аппарат.
Экспериментальные методы идентификации базируются на пассив ном либо активном эксперименте. В первом случае исследуются режимы естественной эксплуатации технологических объектов управления, во втором задаются такие, которые наилучшим образом выявляют его свойства. Во время эксперимента измеряются значения интересующих нас технологических параметров (управляемых выходных переменных) и факторов, на них влияющих (управляющих входных переменных и возмущений). Эти данные позволяют выбрать математическое выражение и определить входящие в него коэффициенты, исходя из обеспечения адекватности модели объекту. Полученная таким об разом модель должна с заданной степенью точности соответствовать реальному объекту, т.е. расчетные и экспериментальные значения выходных переменных при заданных управляющих воздействиях и возмущениях должны совпадать в динамических и статических режимах.
Проведение эксперимента и последующая обработка его результатов для создания модели усложняются в связи с тем, что технологические объекты управления, как правило, многомерные и недетерминированные. Поэтому при проведении серии повторяющихся экспериментов при подаче одинаковых входных переменных на выходе можно получать различные значения одной и той же технологической переменной. Такое различие объясняется действием случайных сочетаний неучтенных факторов. Если разбросы незначительные, то задача сводится к оценке степени приближения модели к результатам эксперимента. При значительных отклонениях под сомнение ставится правильность выбора типа модели. В ряде случаев возникает даже необходимость сначала установить сам факт наличия закономерности между входными и выходными величинами. В этом случае решающее значение приобретает задача определения объема эксперимента. Под объемом эксперимента понимают количество учитываемых факторов, частоту повторения однотипных экспериментов и их количество. Чем больше число повторений опыта, тем достовернее модель, т.е. тем больше вероятность нахождения истинного значения переменной в более узком интервале эксперимента.
Исходя из изложенного, можно установить следующие основные этапы получения модели технологического объекта управления по экспериментальным данным:
- планирование объема эксперимента: количества контролируемых параметров, числа измерений и кратности их повторения;
- выбор типа математической модели (уравнения регрессии);
- выполнение эксперимента и обработка данных;
- определение количественных характеристик (коэффициентов) принятого типа модели;
- проверка значимости полученных коэффициентов по влиянию на них разброса результатов экспериментов;
- проверка адекватности модели объекту.
Если две последние проверки дают отрицательный результат, то проводится уточнение объема эксперимента, эксперимент повторяется, уточняется модель объекта.
Идентификация одномерных детерминированных объектов
Задача состоит в представлении в аналитическом виде существующей связи между входом и выходом одномерного объекта. Полагаем, что при эксперименте случайные помехи отсутствуют и в экспериментально снятых значениях нет разброса. Для таких объектов модель наиболее часто описывается полиномом вид:
![]()
Степень полинома ориентировочно можно определить по разностям экспериментально снятых ординат функции при постоянных приращениях аргумента. Она принимается равной такому порядку разностей, при котором они становятся примерно постоянными во всем диапазоне изменения входной величины. Например, при неизменных разностях между ординатами модель описывается полиномом первой степени, при неизменных разностях между разностями второго порядка — полиномом второй степени и t.д.
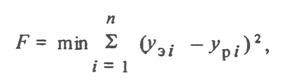
Оптимальной может считаться модель, у которой при определенных расчетом коэффициентах сумма квадратов отклонений расчетных ур и экспериментальных уэ значений будет минимальной, т.е. минимизируется функционал

где п — число опытов.
Для определения коэффициентов модели составляют систему уравнений типа
![]()
Совместное решение полученных уравнений относительно ai дает такие их значения, при которых удовлетворяется условие (3.15).
Для упрощения (3.16) целесообразно начало отсчета абсциссы xiпомещать в середину интервала экспериментально снятых значений и пользоваться симметричными значениями xi (одинаковыми, но раз личными по знакам). В этом случае все суммы нечетных степеней х будут обращаться в нуль, что существенно упростит систему уравнений.
Например, если в качестве модели выбран полином второй степени
![]()
то функционал (3.15) имеет вид

Коэффициенты являются неизвестными переменными. В соответствии с (3.16) составляем систему уравнений:
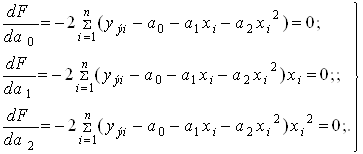
Приравнивая суммы нечетных степеней xi к нулю, получаем
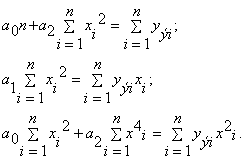
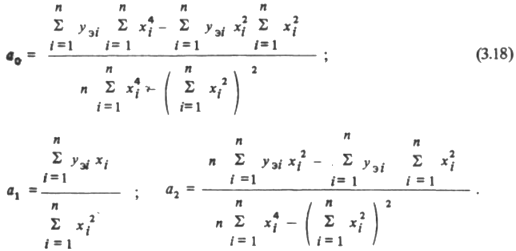
Решение относительно коэффициентов:
Рассчитав коэффициенты и подставив их в (3.16), получим уравнение регрессии.
Идентификация многомерных объектов
Получение модели многомерных объектов по результатам эксперимента осложняется прежде всего тем, что на исследуемый параметр влияет много факторов, которые сложно разделить на существенные и несущественные, поэтому трудно определить число входов объекта, подлежащих учету.
В отличие от одномерных объектов затруднена геометрическая интерпретация модели. Так, для двух входных параметров, влияющих на третий выходной, приходится обращаться к двухмерной области. Увеличение входов требует рассмотрения многомерной гиперповерхности, описываемой уравнением с несколькими аргументами и не поддающейся геометрической интерпретации.
Вместе с тем модель, отражающая зависимость исследуемого параметра или критерия от многих переменных, должна быть достаточно информативной, достоверной и удобной в пользовании.
При значительном числе входов xi модель может быть нелинейной и иметь сложный рельеф с вершинами, впадинами, гребнями. Поиск экстремальных точек (вершин и впадин) на этой поверхности путем изменения входных величин составляет содержание оптимального управления. Обычно такая модель называется целевой функцией или поверхностью отклика, а оптимальное управление обеспечивает работу технологического объекта управления в области экстремального значения критерия качества.
Получить по данным эксперимента модель объекта управления, точно воспроизводящую поверхность отклика, весьма сложно. Поэтому на практике часто ограничиваются ее линейным или квадратичным приближением, выбирая диапазон изменения переменных в ограниченной области. Это возможно, если функция непрерывная и выпуклая. Границы области обычно выбирают так, чтобы в нее попал экстремум или предельно допустимые значения y и xi.
Такой подход может дать в большей степени качественное, нежели количественное решение. Оно сводится к оценке влияния различных факторов на исследуемую переменную y и дает возможность пренебречь некоторыми из них.
Метод, позволяющий получить многомерную модель объекта управления на основе эксперимента, получил название факторного анализа, нередко он называется методом планирования эксперимента, факторным экспериментом и т.п. Применительно к детерминированному объекту метод заключается в следующем:
- для объекта выбирают факторы хi, оказывающие существенное влияние на выход у; определяют области изменения хi;
- составляют программу (план) эксперимента;
- принудительно изменяя xi в избранных пределах и сочетаниях, определяемых программой эксперимента, фиксируют значения у;
- рассчитывают коэффициенты уравнений модели.
Основными условиями проведения эксперимента являются:
- выбор независимых друг от друга входных величин хi
- возможность и наблюдаемость изменения у;
- возможность задания хi с точностью, превышающей точность измерения у.
При постановке задачи выбирается центр области варьирования с координатами у0, х1 0, х2 0 … и устанавливаются границы области варьирования. По возможности область выбирается меньшей, что повышает точность модели. Выбор границ осуществляется с учетом влияния помех, так чтобы последние были намного меньшими, чем планируемое отклонение входной величины ximax или ximin от начального значения хi0.
Природа объекта управления такова, что xi могут иметь различные физическую природу и размерность. Поэтому желательно пользоваться относительными величинами входных переменных. В качестве базовых удобно выбирать предельные отклонения ∆хi.
В этом случае

При таком подходе ось у помещается в центр идентифицируемой области, для которой
![]()
План проведения эксперимента и методика расчета коэффициентов зависят от выбранного типа модели. В наиболее часто встречающемся виде многомерная модель представляется степенным полиномом, содержащим также члены, учитывающие совместное действие факторов. Модель, порядок которой не превосходит второго, имеет вид
![]()
Г
де х0 — фиктивная переменная, вводимая для унификации членов модели и всегда равная 1.
После выбора типа модели определяется объем эксперимента. Необходимо установить, сколько раз, в какой последовательности и в каких различных сочетаниях надо изменять хi чтобы при минимальном объеме эксперимента получить достаточно достоверный результат.
При идентификации методом планирования эксперимента принимается следующая последовательность операций:
- все члены уравнения модели, содержащие переменные xi их квадраты и произведения записывают в виде линейных уравнений aixiи нумеруют последовательно при составлении полинома
![]()
или в общем виде

где n - число членов уравнения регрессии; j = 1/N - номер эксперимента;
для определения коэффициентов уравнения ai в соответсвии с методом минимума суммы квадратов отклонений записывают функционал:
где N - число экспериментов (опытов), берут частные производные этого функционала по коэффициентам и, приравнивая их нулю, получают систему уравнений dF / dai = 0, из которой определяют аi.
Более просто получить результат, если считать, что минимум отклонений имеет место при совпадении результатов расчетной модели и эксперимента в точках проведения опытов, т.е. полагать
В этом случае коэффициенты должны удовлетворять системе линейных уравнений вида (3.23). В матричной форме эта система имеет вид
Y=XA, (3.24)
где Y — матрица-столбец экспериментальных значений у с числом элементов N9 равных числу опытов;
А — матрица-столбец коэффициентов вм с числом элементов, равным числу членов полинома л;
X - матрица входных воздействий xt размером N * п.
Чтобы матрицу X сделать квадратной и далее диагональной, умножим обе части (3.24) на транспонированную матрицу Хt. Обозначим Хt Х = С и получим
![]()
![]()
откуда
![]()
Если выбрать определенную последовательность изменения входов xi, то квадратная матрица С и обратная ей матрица С-1 будут диагональными. Тогда система (3.25) разбивается на п независимых уравнений, каждое из которых будет включать лишь один неизвестный коэффициент
где N — номер опыта.
Диагональность матрицы С-1 определяется таким варьированием хi которое подчиняется условиям:
- симметричности - сумма xi одного столбца должна быть равна нулю;
- нормированности – сумма x2i одного столбца должна быть равна числу опытов с разными сочетаниями xi;
- ортогональности - сумма xi – 1 xi должна быть равна нулю.
Удовлетворяя этим условиям, составляем таблицу планирования эксперимента (табл. 3.4) для двух факторов согласно (3.22) так, чтобы получить четыре разные комбинации значений переменных хх и х2.
Из таблицы видно, что число комбинаций значений переменных равно M = 22 = 4, причем сумма хi в колонках 1, 2 равна нулю; сумма хi в колонках 4, 5 равна 4; сумма в колонке 3 равна нулю.
Таблица 3.4
| x0 | x1 | x2 | x3=x1x2 | x4= | x5= | |
| 0 | 1 | 2 | 3 | 4 | 5 | |
| + | - | - | + | + | + | |
| + | + | - | - | + | + | |
| + | - | + | - | + | + | |
| + | + | + | + | + | + |
Колонки 4 и 5 имеют значения, аналогичные колонке 0, т.е. не дают дополнительной информации, поэтому следует ограничиться четырьмя колонками лго> xl9 x2 и ххх2 (участок табл. 3.4, очерченный двойными линиями). Получим модель вида путем приравнивания нулю частных производных по ai получаем систему уравнений
Минимизируя функционал
Если эксперимент спланирован с выполнением условий симметричности, нормированности и ортогональности, то рассмотренные выражения окажутся проще, так как

С учетом этого выражения для расчета коэффициентов получим в соответствии с (3.26) моделей объектов.
Эксперимент, при котором перебираются все возможные сочетания xi, называют полнофакторным или ПФЭ2n. Он дает возможность определить только коэффициент при входных воздействиях первого порядка и их сочетаниях. Такой ПФЭ называют планом первого порядка.
Кроме ПФЭ2n применяется дробный факторный эксперимент (ДФЭ), который позволяет уменьшить объем эксперимента. По числу коэффициентов выполняются эксперименты для реализации (3.23). Так, если требуется определить четыре коэффициента - а0, alt a2, а-х, то достаточно провести четыре эксперимента, удовлетворяющих требованиям ПФЭ. Это соответствует двухфакторному эксперименту, где колонка x1 х2 заменена колонкой х3. Для модели типа
![]()
вместо N = 23 =8 достаточно провести четыре опыта. В таблице планирования эксперимента (табл. 3.4) колонка 0 заполняется плюсами, 1 — чередованием плюса и минуса через одну строку, 2 — через две строки, а 3 формируется путем умножения построчно колонок 1 и 2. Модель в абсолютных единицах после определения коэффициентов записывается в виде
![]()
Динамическая идентификация
Многие технологические объекты управления, функционирование которых в динамике еще недостаточно изучено, не могут быть описаны аналитически. Для получения их динамических моделей также применяются экспериментальные методы. Целью последних является нахождение аналитических выражений, описывающих динамику объекта управления с требуемой степенью точности. В отличие от статических моделей динамические связывают выходную величину с входным воздействием в процессе их изменения во времени.
В практике предшествующих дисциплин для записи динамических моделей линейных систем использовался аппарат дифференциальных уравнений. Как правило, технологические объекты управления являются системами, элементы которых имеют нелинейные характеристики и описываются уравнениями высоких порядков. В передаточных устройствах электропривода имеются люфты, возможно наличие сухого трения, приходится учитывать упругости их элементов и т.д.
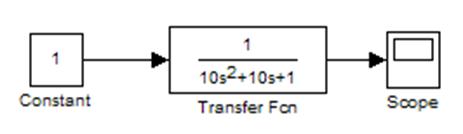
Применение методов математического моделирования избавляет исследователя от решения дифференциальных уравнений, но при этом необходимо иметь аналитические модели всех звеньев.
Экспериментальные методы позволяют получить формальную модель практически любого объекта по результатам обработки экспериментальных данных. Существуют активные и пассивные эксперименты.
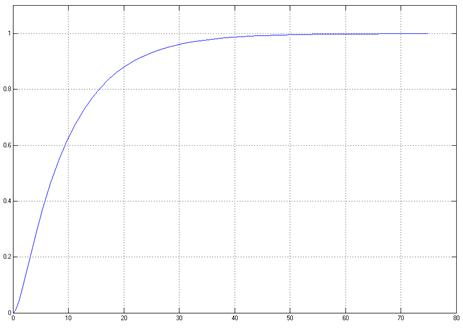
Активный эксперимент основан на задании объекту специально сформированных управляющих или возмущающих воздействий. По реакции объекта на эти воздействия устанавливаются и оцениваются его динамические свойства. Обычно изучается реакция на скачкообразные, гармонические или импульсные воздействия. Полученные переходные или частотные характеристики позволяют определить, например, для линейной системы передаточные коэффициенты, постоянные времени отдельных звеньев и динамические свойства объекта в целом.
Не для всех систем может быть поставлен активный эксперимент. Иногда он может быть неприемлем из-за дороговизны специального дополнительного оборудования, высокой стоимости его монтажа, нередко его реализация невозможна по условиям техники безопасности. В этих случаях применяется пассивный эксперимент. Сущность его заключается в фиксации значений входных и выходных переменных в нормальных эксплуатационных динамических режимах.
Одним из сравнительно несложных современных методов динамической идентификации, основанных на результатах пассивного эксперимента, является метод Калмана. Сущность его заключается в следующем:
- в процессе эксплуатации через строго фиксированные интервалы времени записывают значения входных и выходных параметров;
- выбирают наиболее простой вид аналитической модели, записан ной в виде разностного уравнения того или иного порядка;
- по результатам эксперимента и принятого типа модели методом минимума суммы квадратов отклонений определяют коэффициенты разностного уравнения;
- решают разностное уравнение и сравнивают полученные динамические характеристики с экспериментом;
- при больших отклонениях задаются разностным уравнением более высокого порядка и повторяют расчет.
Сопоставление изложенной выше методики динамической идентификации с порядком выполнения статической идентификации свидетельствует об их аналогии. Отличие состоит лишь в моделях: модель в ста тике описывается алгебраическим уравнением, динамическая модель — разностным.
Для дифференциального линейного уравнения k - го порядка аналогом будет разностное уравнение вида

где п — номер точки эксперимента; А, В — коэффициенты разностного уравнения. Оно может быть принято в качестве исходной модели при динамической идентификации.
Поскольку порядок идентифицируемого объекта обычно неизвестен, следует начинать с наиболее простой модели, а именно — разностного уравнения первого порядка вида
![]()
Если модель окажется недостаточно адекватной, следует взять в качестве модели разностное уравнение второго порядка
yn = A0yn –1 + A0yn –2 + B0xn –1 + B0xn –2
Далее, используя методику минимизации суммы квадратов отклонений, т.е. функционала вида
Получаем систему уравнений из которых можно А0 А1, В0, В1

Экспериментальные модели недетерминированных объектов
Выше рассматривались простейшие случаи получения экспериментальным путем гладких, устойчиво, без разбросов повторяющихся аналитических моделей. Пригодность такой модели оценивалась по допустимому максимальному отклонению от эксперимента. На практике на эксперимент оказывает влияние действие многих малозначащих факто ров в различных непрогнозируемых сочетаниях. Поэтому при повторении опытов с одними и теми же значениями входов получают неповторяющиеся значения выходов. Разброс выходных величин, его причины и характер могут быть различными. Они могут вызываться систематическими погрешностями, являющимися функцией времени (изменение сопротивления резистора при изменении температуры, дрейф нуля усилителя и т.п.). Разброс может быть вызван пороговым действием какого-либо неучтенного фактора и при эксперименте давать повторяющуюся зависимость, имеющую характер ломаной линии. Весьма часто на разброс влияют отклонения случайного характера.
Для устранения систематических погрешностей применяют многократное повторение необходимой номенклатуры опытов при различных сочетаниях значений входов в случайной последовательности (рандомизация). Так, при двухфакторном эксперименте с N, равным 4 опытам, с приведенными ранее сочетаниями х1 и х2 (см. табл. 3.4) при первом эксперименте проводят опыты в последовательности 1, 2, 3, 4, затем меняют последовательность - 3, 1, 2, 4 и т.д. Случайные последовательности номеров опытов получают, пользуясь таблицами случайных чисел (отбрасывая повторяющиеся числа и значения, большие N). Квазислучайные последовательности получают, используя различные алгоритмы, например алгоритм Неймана. По этому алгоритму для получения случайных чисел в пределах 0 ... 1 выбирают произвольное число, меньшее единицы, возводят его в квадрат, берут из середины результата необходимое число разрядов, вновь возводят в квадрат и т.д.
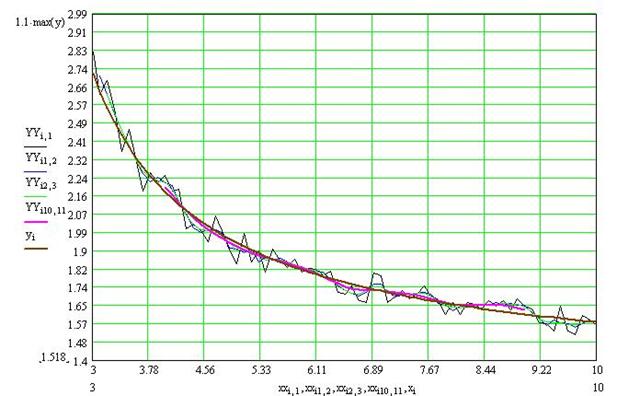
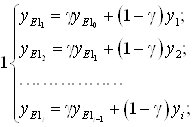
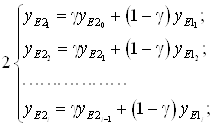
Когда действует порогово-дискретный фактор, применяют сглаживание. Наиболее простой метод сглаживания — по способу скользящей средней. Состоит он в вычислении средней ординаты для фиксированных значений абсцисс:
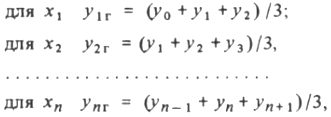
где унr - п-я ордината на гладкой (сглаженной) кривой.
Когда разброс вызван действием случайных факторов, задача усложняется тем, что значения переменных и параметров, полученные при проведении эксперимента, являются лишь приближенными оценками неизвестных истинных значений, т.е. эти значения получены со случайными погрешностями, а следовательно, и сами оценки являются случайными величинами.
Для приближенного выбора вида модели результаты эксперимента фиксируют в виде точек в системе прямоугольных координат. При слабом действии случайных помех просматривается обобщенный характер зависимости: линейная или нелинейная, возрастающая или спадающая. Задавшись видом уравнения регрессии, можно получить коэффициенты методом наименьших квадратов и далее оценить адекватность уравнения регрессии и истинной модели объекта.
Если разброс столь значителен, что визуально невозможно оценить характер закономерности и предварительно выбрать модель, то приходится увеличивать серии повторяющихся опытов. При этом чаще повторяются наиболее характерные и вероятные значения, определяющие физическую сущность объекта, что позволяет задаться тем или иным типом модели.
В общем, и весьма упрощенном виде подход к идентификации недетерминированных объектов можно рассматривать следующим образом. Полученная по результатам эксперимента модель является лишь приближенной оценкой истинных параметров и определяет интервал, в котором находятся истинные значения, с той или иной достоверностью. Чем меньший разброс наблюдается во время эксперимента, тем выше достоверность нахождения истинного значения в данном интервале. В соответствии с теорией вероятности при стремлении числа опытов к бесконечности интервал стремится к нулю, а достоверность - к единице.
Следовательно, планирование эксперимента для идентификации не детерминированных объектов должно определять такие его объем и число повторений, при которых будет обеспечена заданная достоверность модели. Эти задачи решаются с использованием аппарата математической статистики, корреляционного и регрессионного анализов. При решении этих задач пользуются положениями теории случайных событий и процессов. Событие — это любой факт, фиксируемый во время эксперимента. Численной мерой объективной возможности наступления события является вероятность. Вероятность простого события определяется расчетным путем только для опытов, сводящихся к схеме случая: события независимы, равновероятны, какое-либо одно обязательно должно произойти. Эта вероятность Р* определяется как отношение возможного числа событий с интересующим нас исходом n* общему числу возможных событий m*
Р* = п*/т*.
Большинство реальных опытов нельзя свести к схеме случая. Поэтому экспериментально определяется статистическая вероятность Р как отношение числа опытов n, в которых наблюдался интересующий нас исход, к общему числу проведенных опытов т:
Р = п/т.
Согласно теореме Бернулли при m→∞ разность Р* - Р стремится к нулю.
События бывают:
- достоверные (Р * = 1),
- невозможные (Р* = 0),
- случайные (0 < Р* < 1);
- совместные (одновременные);
- несовместные;
- зависимые (появление одного меняет вероятность появления другого) и независимые. Под потоком событий понимают следующие друг за другом события в случайные моменты времени.
Вероятность совместного наступления нескольких простых независимых событий равна произведению вероятностей наступления каждого из них. Вероятность наступления одного из нескольких несовместных событий равна сумме вероятностей наступления каждого из них.
Случайные события определяются также численными характеристиками - случайными величинами. Они могут быть непрерывными, например время tk, в течение которого произошло к событий, и дискретными, например число событий к в интервале времени tk.
Связь случайной величины с вероятностью его появления математически описывается законами распределения случайных величин. Эти законы определяются по результатам статистической обработки данных эксперимента.
Законы распределения чаще всего представляются в виде интегральной F(x) или дифференциальной f(x) функции распределения. Первая применяется для дискретных величин и определяет вероятность того, что случайная величина не превышает некоторого фиксированного ее значения хk, т.е. вероятность ее нахождения в интервале
![]()
ФОРМАЛИЗАЦИЯ ДИСКРЕТНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ ОПЕРАЦИЙ (ТЕХНОЛОГИЧЕСКИХ ЦИКЛОВ)
Структура формирования технологического цикла
Полный технологический цикл изготовления готовой штучной продукции всегда представляет собой совокупность отдельных технологических операций, сменяющих друг друга в определенной последовательности. Причинами смены операций могут быть команды человека-оператора или автоматического устройства, выдающего их после получения сигналов от датчиков об окончании предыдущей операции в соответствии с заложенной в него программой. В то же время очень редко можно обеспечить нормальную работу агрегата, ориентируясь на "жесткую" программу, не способную адаптироваться к неожиданным ситуациям, возникающим в технологическом цикле. Так, если на какой-либо операции становится очевидным появление брака, то оператор или автоматическое устройство следующей командой должны предусмотреть не продолжение обработки, а останов агрегата и уборку бракованной детали. Аналогичная ситуация возникает при поломке оборудования, превышении допустимых значений параметров процесса, несоответствии параметров исходной заготовки техническим условиям.
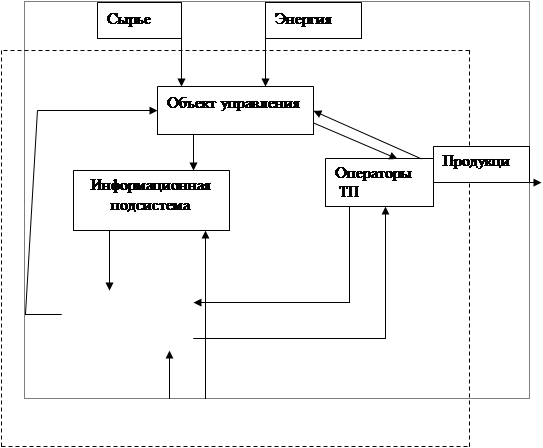
При управлении технологическим циклом необходимо формировать дискретную последовательность (программу) команд исполнительным элементам технологического объекта управления (электро- и гидроприводам). Формирование команд осуществляется управляющим устройством, называемым дискретным автоматом (рис. 3.6), на основе логического анализа ситуации, о которой сообщают различные датчики положения детали, завершения или качества протекания очередной технологической операции, по командным и оповестительным входам. Только зная, как и при каких условиях должна формироваться нужная последовательность состояния объекта управления, можно сформулировать задание на синтез управляющего устройства.
Таким образом, хотя общая функциональная структура АСУ ТП остается такой, как представлена на рис. 3.6.1 методы построения модели технологического цикла принципиально отличны от рассмотренных выше методов получения моделей объекта, отражающих непрерывное его функционирование в процессе выполнения технологической операции
Существуют различные формы представления моделей дискретных последовательностей операций, т.е. моделей технологического цикла. Они могут предоставляться в виде таблиц, циклограмм, графов, формул и т.д. Предполагая, что все технологические последовательности, в конечном счете, представляют собой повторяющиеся циклы, следует выделить два существенно отличных вида моделей: комбинационные и последовательностные. В первом случае дальнейшее функционирование объекта определяется только состоянием объекта при выполнении предшествующей операции; во втором — последовательностью смены предшествующих операций.
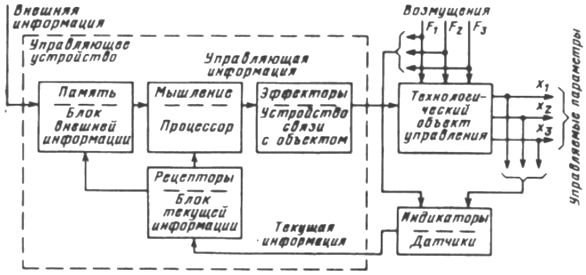
Рисунок 3.6.1 – Структура управления технологическим объектом человеком – оператором или АСУ ТП
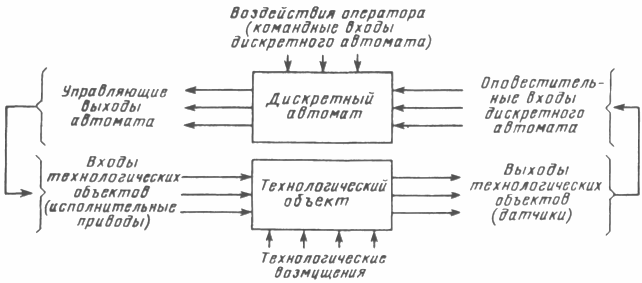
Рисунок 3.6 – Структура управления технологическим циклом при помощи дискретного автоматического устройства
Для удобства деления цикла на отдельные элементы вводится понятие технологического такта или состояния, т.е. конечного интервала, времени, когда агрегат работает с неизменной комбинацией включенных (отключенных) командных (кнопки, ключи), оповестительных (датчики) и исполнительных (электро-, гидроприводы, электромагниты, муфты) элементов.
Общая последовательность формализации технологического цикла состоит из следующих этапов:
1)составления содержательного описания, в котором в произвольной повествовательной форме описывается технологический цикл при нормальном его ходе и аварийных ситуациях;
2)разбиения цикла на такты, характеризуемые неизменным состоянием исполнительных приводов и контролируемых параметров;
3)анализ переходов от одного такта к другому при нормальных и аварийных ситуациях для выявления причин переходов, т.е. выявления изменения состояния командных и исполнительных органов вызывающих переход;
4) установления причинно-следственных и логических ситуационных связей между входами и выходами объектам правления, обусловленных требованиям технологии;
5) составления формализованного графического представления алгоритма функционирования в виде таблицы, циклограммы, графика и т.п.
Комбинационные детерминированные модели. Таблицы истинности
В качестве комбинационных (как наиболее простого вида) моделей, в которых дальнейший ход цикла определяется состоянием входов и выходов объекта управления только в данном такте, часто используются таблицы истинности, отражающие однозначное соответствие дискретных состояний входов и выходов объекта управления.
Активное (включенное) или пассивное (отключенное) состояние исполнительного элемента (входа) или уровень контролируемого выхода (высокий, низкий) может обозначаться любыми символами. Обычно для этих целей используются дискретные величины 1 и 0. При числе входов п возможны N = 2п сочетаний комбинаций их единичного и нулевого уровней. Поскольку последовательность смены комбинаций в данном случае роли не играет, в таблице истинности их удобно располагать в виде кодов натурального ряда двоичных чисел, т.е. чередуя 0 и 1 для первого входа через одно состояние, для второго — через два, для третьего — через четыре и т.д. Особо следует отметить, что не все комбинации состояний входов (исполнительных приводов) и датчиков реально могут иметь место.
Последовательностные детерминированные модели
В отличие от комбинационных моделей при составлении последовательностных моделей необходимо отражать однозначное соответствие состояний выходов комбинациям состояний входов, как в данном такте, так и в предыдущих. Следовательно, одна и та же комбинация входов в данном такте может вызвать переход в разные новые стояния в зависимости от того, каким было предшествующее состояние. Поэтому в модели должны быть отражены не только данный такт, но и предыстория.
В зависимости от сложности объекта используются различные виды моделей. В простейшем случае применяются циклограммы, в которых состояния отражают условным изображением включенного или отключенного исполнительного элемента в виде наличия или отсутствия линии. При большом числе состояний применяются таблицы состояний и графы. Более конкретно методика составления моделей изложена на примерах.
Циклограмма. Она представляет собой ряд горизонтальных строк, равных числу командных и исполнительных элементов. Строки условно разбиты на отрезки, число которых равно числу элементарных технологических тактов. Включенное состояние элемента на строке обозначается сплошной линией, отключенное — отсутствием ее. Вертикальными линиями на циклограммах показана "передача управления" - причинно-следственные связи между командными и исполнительны ми элементами.
Когда элемент включен, совокупность тактов называется периодом включения, а когда отключен — периодом отключения. Такт, предшествующий периоду включения, называется включающим, а периоду отключения - отключающим.
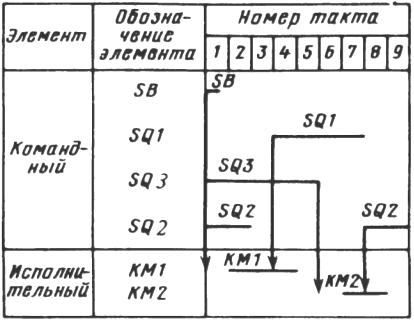
Рисунок 3.8 – Циклограмма работы грузового подъемника.
Пример 1. Рассмотрим циклограмму работы грузового подъемника (рис. 3.8). Грузовой подъемник с тележкой от подачи кратковременной команды кнопкой SB (пуск) идет вверх [кнопка SB включает контактор "Вперед" КМ1 (SB - КМ1), после чего отключается (такт 1)]. В начале движения отключается нижний конечный выключатель SQ2 (такт 2). После достижения крайнего верхнего положения кабина воздействует на верхний конечный выключатель SQ1, который дает команду на отключение КМ1 (такт 3, SQ1 - КМ1). Контактор КМ1 отключается (такт 4). После выката тележки отключается конечный выключатель SQ3 (такт 5) и включается контактор "Назад" КМ2, подъемник идет вниз (такт 6, SQ3 - КМ2), отключается SQ1 (такт 7). После воздействия внизу на нижний конечный выключатель SQ2 отключается КМ2 (такт 8, SQ2 - КМ2), кабина останавливается (такт 9).
Таблица состояний. Число строк таблицы соответствует числу состояний, число столбцов — числу возможных комбинаций переменных; крайний левый столбец фиксирует номера исходных состояний.
Таблица 3.15
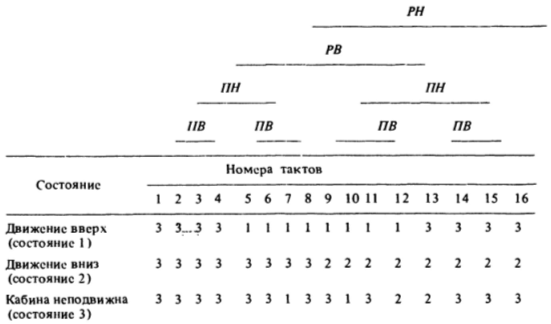
Над таблицей приводится мнемограмма. В клетках проставляются номера состояний, обусловленных исходным состоянием и возникшей комбинацией управляющих переменных.
Пример 2. Подъемник перемещается с одного уровня на другой реверсивным приводом, включаемым исполнительными элементами контакторами КМ1 и КМ2. Пуск подъемника осуществляется по команде от этажных кнопок SB1, SB2y SB3, SB4. Аварийные ситуации предот вращаются реле перегрузки, конечными выключателями SQ1 и SQ2 и контролем закрытия дверей шахты SQ3t SQ4. Все командные переменные сведены к четырем: пуск вверх ПВ — нажаты кнопки "Вверх" SB1, SB3 на первом или втором этаже; пуск вниз ПН — нажаты кнопки "Вниз" SB2t SB4 на первом или втором этаже; есть разрешение дви- гаться вверх РВ — закрыты все двери, не нажат конечный выключатель SQ1, нет перегрузки; есть разрешение двигаться вниз РН — закрыты все двери, не нажат конечный выключатель SQ2, нет перегрузки.
Число возможных состояний три: 1 — движение вверх, 2 — движение вниз, 3 — кабина неподвижна. Таблица состояний (табл. 3.15) содержит три строки и 24 = 16 столбцов. Число столбцов равно числу комбинаций командных переменных.
В первой строке исходным является состояние 1 (движение вверх), поэтому во всех клетках, соответствующих действию РВ, проставляется 1. При отсутствии разрешения на движение вверх (отсутствует PВ) кабина не движется, в этих клетках ставится 3. Аналогично заполняется вторая строка, т.е. где есть РН — ставится 2, а в остальных — 3.
В третьей строке указывается исходное состояние кабины 3, поэтому 3 проставляется: в клетках 1-4, так как нет РВ и РН; в клетках 8, 9, 16, так как нет вызова (отсутствуют ПВ и ПН); в клетках 5 и 15, так как здесь разрешение противоречит вызову (есть ПВ, нет РВ и на оборот). В клетках 7,10 ставится 1, а в клетках 12, 13 - 2, так как разрешение соответствует вызову. Состояние командных органов для клеток 6, 11, 14 нереально при нормальной эксплуатации (есть одно временно два вызова: вверх и вниз). В такой ситуации кабина может оставаться неподвижной, т.е. ставится 3.
Граф-схема. При представлении цикла в виде графа в вершинах (кружках) проставляются номера (коды) состояний. Вершины соединяются стрелками, отражающими переходы из одного состояния в другое.
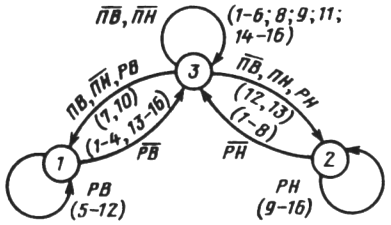
Рисунок. 3.9 – Граф-схема алгоритма функционирования подъемника
Над стрелками записываются комбинации переменных, обусловливающих этот переход.
На рис. 3.9 представлен граф, описывающий работу подъемника из примера 3.8. Граф имеет три вершины (состояния 1, 2, 3) (см. табл. 3.15). Пуск из состояния 3 (подъемник неподвижен) в состояние 1 или 2 (движение вверх или вниз) обусловлен наличием требуемой команды (ПВ или ПН), отсутствием противоположной (ПН или ПВ) и наличием разрешений (РВ или РН). Обратный переход обусловлен только отсутствием разрешения (РВ или РН), т.е. снятие ПВ или ПН останова не вызывает. Сохранение состояния 1 или 2 обусловлено только наличием РВ или РН, а состояние 3—их отсутствием. В скобках над или под стрелками указаны номера комбинаций переменных (такты), соответствующие данному переходу.
Представление тем или иным образом алгоритма функционирования зависит от степени их освоения и приобретенных навыков.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
1. Автоматизация типовых технологических процессов и установок: Учебник для вузов/А.М. Корытин, Н.К. Петров, С.Н. Радимов, Н.К. Шапарев. —2-еизд., перераб. и доп. - М.: Энерго-атомиздат, 1988.—432 с: ил.
Похожие работы
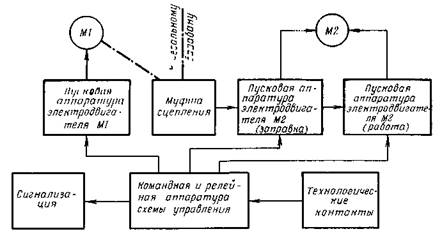
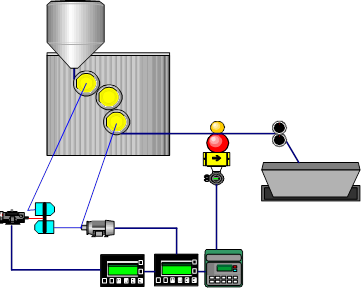
... М2 и зажигается сигнализация. После устранения технологических неполадок пуск электродвигателя М2 производится в приведенной выше последовательности. Фрагмент функциональной схемы автоматизации чесальной машины показан на рисунке 2. Мнемосхема выполненная в GENESIS на рисунке 3. Рисунок 2. Фрагмент функциональной схемы автоматизации чесальной машины. Регулятор ЛПЛ на чесальной машине ЧМД ...
... АСР. Данная схема детализируется для расчета замкнутой АСР и приводится к виду X0 Wp(p) Рис. 7. Структурная схема замкнутой автоматической системы управления, состоящей из объекта и регулятора В качестве выходной величины системы ...
... Рисунок 6 – Графики сигналов на входе звена типа «люфт» и после компенсации в среде Matlab Выводы: в ходе лабораторной работы я приобрел навыки моделирования нелинейного объекта типа «люфт», проанализировала их влияние на точность системы, составила и исследовала модель для компенсации люфта. Оптимизация параметров пид-регуляторов для объектов управления с нелинейностями Цель ...
... задвижек больших диаметров, установленных на обводе сетевых подогревателей, в ряде случаев вызывает значительные трудности. Способ может быть реализован только на турбинах с регулируемыми отопительными отборами пара. Совместное применение способов отключения ПВД и скользящего противодавления обеспечивает в течение всего отопительного сезона гарантированное снижение электрической мощности ...
0 комментариев