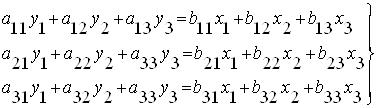
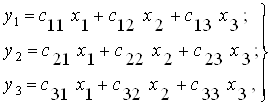
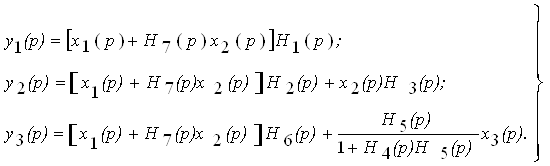
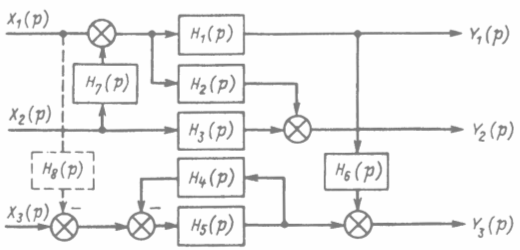
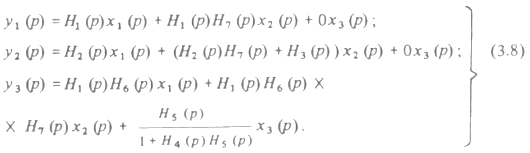
В современных сложных объектах, как правило, выходной сигнал объекта зависит не от одного входного сигнала, как в случае с кривой разгона, а от нескольких входных сигналов, т.е. объект управления имеет сложное переплетение взаимосвязей входных и выходных сигналов.
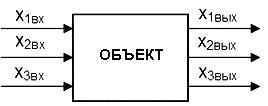
Рис. 1. Схема объекта, состоящего из нескольких взаимосвязанных входных-выходных сигналов
Для идентификации таких сложных объектов используется метод регрессионного анализа с проведением активного эксперимента на базе теории математического планирования эксперимента.
Назначение этой теории – значительно сократить количество экспериментальных опытов и упростить расчеты, необходимые для получения уравнения взаимосвязи выходного сигнала с несколькими входными сигналами – уравнения регрессии.
Сокращение числа необходимых экспериментов в теории математического планирования эксперимента достигается за счет одновременного изменения всех входных сигналов (факторов), а упрощение расчетов получается за счет того, что изменение входных сигналов (факторов) нормируется, т.е. величины ![]() . Пусть
. Пусть ![]() – зависит от 2-х входных факторов.
– зависит от 2-х входных факторов.
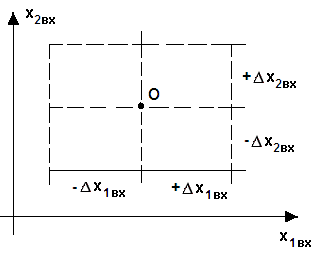
Рис. 2. Схема исследования объекта методом регрессионного анализа для двух входных сигналов (факторов)
Точка О – номинальный режим работы объекта. Нормализация происходит за счет того, что начало координат переносится в точку О на ![]() .
.
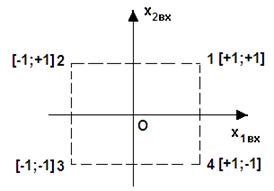
Рис. 3. Схема центрального плана полного факторного эксперимента для двух входных сигналов (факторов)
Здесь (рис. 3) изображен план проведения опытов для изучения зависимости ![]() . Число опытов равно 4=22 – полный факторный эксперимент; Для k входных факторов число опытов в факторном эксперименте: N=2k. При k=3 N=8; k=4, N=16 и т.д.
. Число опытов равно 4=22 – полный факторный эксперимент; Для k входных факторов число опытов в факторном эксперименте: N=2k. При k=3 N=8; k=4, N=16 и т.д.
На приведенном выше рис. 3. изображен центральный (точка О – в центре) ортогональный полный факторный план эксперимента для 2-х входных факторов.
Таблица 1. Полный факторный эксперимент для k=2.
| № опыта |
|
|
|
| 1 | +1 | +1 |
|
| 2 | -1 | +1 |
|
| 3 | -1 | -1 |
|
| 4 | +1 | -1 |
|
Свойство плана, когда, называется ортогональностью плана.
Таблица 2. Полный факторный эксперимент для k=3.
| № опыта |
|
|
|
|
| 1 | +1 | +1 | +1 |
|
| 2 | -1 | +1 | +1 |
|
| 3 | -1 | -1 | +1 |
|
| 4 | +1 | -1 | +1 |
|
| 5 | +1 | +1 | -1 |
|
| 6 | -1 | +1 | -1 |
|
| 7 | -1 | -1 | -1 |
|
| 8 | +1 | -1 | -1 |
|
В полном факторном плане экспериментов число опытов резко возрастает в зависимости от числа входных факторов: k=4 N=16; k=5, N=32; k=6, N=64 опыта. Поэтому для сокращения числа опытов с минимальной потерей информации применяются сокращенные планы – дробные реплики. Если планы содержат половину опытов полного факторного эксперимента, то такой план носит название полуреплики.
Таблица 3. Пример полуреплики для k=4 (ПФЭ=16)
| № опыта |
|
|
|
|
| 1 | +1 | +1 | +1 | +1 |
| 2 | +1 | -1 | +1 | -1 |
| 3 | -1 | +1 | +1 | -1 |
| 4 | -1 | -1 | +1 | +1 |
| 5 | +1 | +1 | -1 | -1 |
| 6 | +1 | -1 | -1 | +1 |
| 7 | -1 | +1 | -1 | +1 |
| 8 | -1 | -1 | -1 | -1 |
Используют также ¼ реплики от полного факторного эксперимента.
Уравнение взаимосвязи входного и выходного сигналов – уравнение регрессии – записывается в виде алгебраического полинома 1-ой и 2-ой степени в следующем виде:
1-ой степени:
xвых = b0 +b1x1+b2x2;
с учетом взаимодействия входных факторов для 2-х входных факторовx1 и x2:
xвых = b0 + b1x1 + b2x2 + b12x1 x2 .
Полином второй степени – уравнение регрессии:
![]()
Естественно, это уравнение более точно описывает взаимосвязь xвых – функции отклика – с входными факторами (сигналами) объекта.
Задача идентификации объекта управления (ОУ) методом регрессивного анализа сводится к выбору порядка математической модели – уравнения регрессии – и определению коэффициентов b0, b1, b2, b12 и т.д. в этом уравнении регрессии. При определении этих коэффициентов используется метод наименьших квадратов, в котором определяется наименьшая сумма отклонений в квадрате (2-ой степени) между реально полученным в эксперименте выходным сигналом и выходным сигналом, рассчитанным (предсказанным) по уравнению регрессии, т.е. ищут минимум функции:
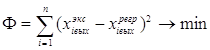
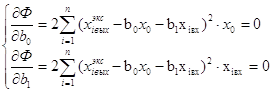
Минимум функции Ф достигается в том случае, когда первая частная производная (тангенс угла наклона к впадине) равна нулю, т.е.
![]() .
.

Рассмотрим пример использования метода наименьших квадратов. Пусть выходной сигнал (функция отклика) зависит от одного фактора (входного сигнала). Активно проведено n экспериментов. Задана ![]() и получена
и получена ![]() – результатов экспериментов. Общий вид уравнения регрессии 1-го порядка для примера:
– результатов экспериментов. Общий вид уравнения регрессии 1-го порядка для примера:
xвых = b0 + b1x1
Методом наименьших квадратов ищем минимум функции Ф:
![]()
Для получения минимума этой Ф приравниваем к нулю частные производные
![]() .
.
Для удобства получения частных производных введем фиктивную переменную x0=1 и функцию Ф запишем:
![]()
x0=1 можно убрать. Тогда
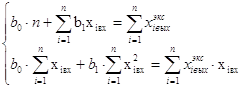
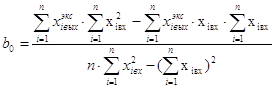
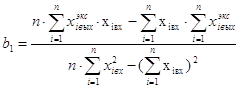
Решая эту систему алгебраических уравнений (можно методом Крамера), находим:
Проверка идентичности математической модели – уравнения регрессии исследуемого объекта проводится по нескольким критериям адекватности и идентичности модели.
Поскольку результаты опытов в эксперименте заранее точно предсказать невозможно, то обработка и сами результаты связаны с неопределенностью или вероятностью. Вероятность изменяется в пределах: 0 – события быть не может, 1 – событие произойдет обязательно (день-ночь). При большом числе параллельных (одинаковые условия) опытов вероятность может быть задана в виде функции распределения вероятностей (рис. 4.):
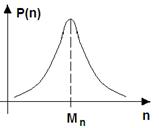
Рис. 4. Схема нормального (гауссовского) закона распределения вероятностей
На практике чаще всего используется так называемое нормальное (гауссовское) распределение вероятностей.
Случайная величина (![]() ) имеет несколько числовых характеристик, наиболее важные из которых – это математическое ожидание и дисперсия.
) имеет несколько числовых характеристик, наиболее важные из которых – это математическое ожидание и дисперсия.
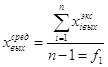
Математическое ожидание – это среднее взвешенное значение случайной величины
![]()
Дисперсия характеризует разброс значений случайной величины относительно ее математического ожидания.
![]() .
.
Проверка значимости уравнения регрессии проводится по критерию Фишера или F-критерию. Проверка заключается в определении, значимо ли (больше ошибки измерения) полученное уравнение ![]() отличается от уравнения
отличается от уравнения ![]() . Для этого вычисляют дисперсию относительно среднего значения выходного сигнала:
. Для этого вычисляют дисперсию относительно среднего значения выходного сигнала:
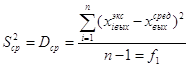 ,
,
где f1 – число степеней свободы,
 .
.
А также остаточную дисперсию:
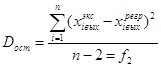 ,
,
f2 – число степеней свободы.
Величину критерия Фишера (F-критерий) определяют по формуле:
![]() (должно быть).
(должно быть).
Значимость коэффициентов bi уравнения регрессии определяют по t-критерию (критерии Стьюдента):
 ,
,
 .
.
Метод корреляционного анализа используется для идентификации объектов управления в том случае, если входные и выходные сигналы являются случайными величинами.
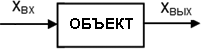
Рис. 5. Схема исследования объекта корреляционным методом
При корреляционном анализе используются:
– автокорреляционная функция (АКФ) и
– взаимокорреляционная функция (ВКФ).
АКФ характеризует зависимость последующих значений случайной величины от предыдущих, находящихся на расстоянии Dt.
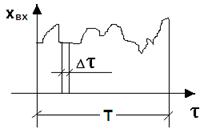
Рис. 6. График изменения входной случайной величины – входного сигнала
АКФ:
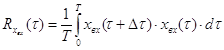 .
.
При Dt ®0 – точнее.
Взаимокорреляционная функция связывает две величины, отстоящие друг от друга на Dt.
ВКФ:
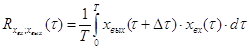 .
.
С АКФ и ВКФ связаны (через преобразование Фурье, когда входной-выходной сигнал раскладывается в ряд Фурье, состоящий из суммы синусоидальных колебаний с различной w – ряд гармоник) спектральные плотности случайных величин.
![]() – для АКФ,
– для АКФ,
![]() – для ВКФ.
– для ВКФ.
Физически ![]() показывает, какая доля мощности случайной величины приходится на данную частоту.
показывает, какая доля мощности случайной величины приходится на данную частоту.
Через спектральную плотность находим АФЧХ объекта:
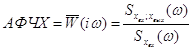 .
.
Техническая диагностика – наука о распознавании состояния технической системы. Диагнозис (гр.) – распознавание.
Объект технического диагностирования – изделие и его составные части, техническое состояние которых подлежит определению с заданной точностью.
Техническое состояние – совокупность свойств объекта, характеризуемая в данный момент времени признаками, установленными технической документацией на объект.
Техническое состояние может быть:
– исправное-неисправное;
– работоспособное-неработоспособное;
– функционирующее правильно и неправильно.
Диагностирование по алгоритму – это совокупность предписаний с использованием диагностических признаков.
Система технического диагностирования – совокупность средств и объекта диагностирования, а также и исполнителей, осуществляющих диагностирование по правилам, установленным соответствующей документацией. Система технической диагностики определяет состояние технического объекта, характер его изменения с течением времени, по определенным диагностическим признакам.
Теоретический фундамент технической диагностики – теория распознавания образов, разработка алгоритмов распознавания, создание диагностических математических моделей, устанавливающих связь между состояниями технической системы и их отображением в пространстве диагностических признаков (сигналов). Диагнозы – классы типичных (типовых) состояний.
Важная часть распознавания – правила принятия решений (решающие правила).
Диагностика в режиме работы объекта называется функциональным техническим диагностированием.
Диагностика, когда проводятся тестовые воздействия – тестовая техническая диагностика.
В технической диагностике введено понятие глубины поиска дефекта, задаваемое указанием составной части объекта диагностики, с точностью, до которой определяется место дефекта. Обычно это модуль или блок, иногда даже микросхема (ЛОМИКОНТ).
Актуальность технической диагностики подтверждается следующими цифрами: в США исследования показали техническое обслуживание и ремонт самолета в 3-4 раза больше его стоимости, ремонт и обслуживание радиотехнического оборудования – 1200% от его стоимости. В СССР (по 181 г.) ремонтом и обслуживанием металлорежущих станков занимались в 4 раза больше рабочих, чем изготовлением этого оборудования. Стоимость заводского ремонта в ВВС США в 187 г. составила 15 млрд. долл., что в 2 раза больше, чем в 180 г.
Тенденция роста убытков, связанных с отказами техники, имеет место во всех развитых странах. Отказы, неисправности, поломки, сбои, ошибки и даже катастрофы – неизбежные факторы, дестабилизирующие процесс нормального функционирования объекта и системы управления. Имеется 3 причины отказов и катастроф:
а) применение малоизученных физических явлений для создания изделий;
б) несоблюдение принципа системности при проектировании изделий; применение несовершенных и неадекватных расчетных схем;
в) "человеческий фактор" в разработке, производстве и эксплуатации изделий ("защита от дурака").
Так, например, недостаточная изученность свойств материалов и несовершенство расчетов привели к катастрофе в США реактивного пассажирского самолета "Комета", который развалился в воздухе. Причина – прямоугольные иллюминаторы, в углах которых возникла концентрация напряжений, что привело к разрушению корпуса самолета. Второй пример. В 167 г. во время наземных испытаний космического корабля "Аполлон" США возникло короткое замыкание в проводе под креслом космонавта – мгновенный пожар в избытке кислорода – погибли 3 человека. В США подсчитано в 156 г., что из-за ошибок рабочих и служащих возникло 2 млн. отказов промышленного оборудования, что стоило 2 млрд. долл. Причина большинства авиакатастроф – "человеческий фактор".
Объективность "человеческого фактора" и необходимость его учета отражена в шуточных законах Мэрфи:
1. Инструмент падает туда, где может нанести наибольший вред.
2. Любая трубка при укорачивании оказывается слишком короткой.
3. После разборки и сборки какого-либо устройства несколько деталей оказываются лишними.
4. Количество имеющихся в наличии запчастей обратно пропорционально потребности в них.
5. Если какая-либо часть устройства может быть смонтирована неправильно, то всегда найдется кто-нибудь, кто так и сделает.
6. Все герметические стыки протекают.
7. При любом расчете число, правильность которого для всех очевидна, становится источником ошибок.
8. Необходимость внесения в конструкцию принципиальных изменений возрастает непрерывно по мере приближения к завершению проекта.
Необходимость в разработке научно обоснованных методов технической диагностики и технических средств для реализации диагностических систем и комплексов подтверждают результаты исследований, по которым установлено, что специалист 25% времени тратит на определенные части изделия, где произошла неисправность, 62% – на определение неисправной детали и только 13% времени – на восстановление отказавшей детали. Техническое диагностирование использует технические математические модели. Отличие диагностических моделей от обычных математических моделей, которые отражают номинальный режим функционирования объекта или системы управления состоит в том, что диагностическая модель описывает существенные свойства аварийных режимов, вызванных различными отказами. Объект или система при разработке диагностической модели рассматриваются по следующей схеме (рис. 3.):
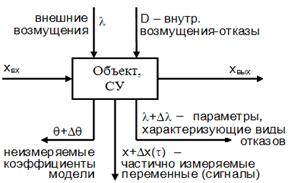
Рис. 7. Схема разработки диагностической модели объекта или системы управления
Иерархия диагностических моделей (ДМ)
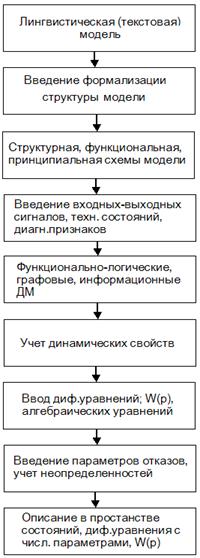
Рис. 8. Иерархия диагностических моделей
Из схемы видно, что диагностические модели могут быть различной сложности: от простых описательных (текст) до математических моделей высокого уровня.
Классификация отказова) по степени влияния: полные, частичные;
б) по характеру проявления: окончательные, перемежающиеся;
в) по степени связи: зависимые, независимые;
г) по частоте проявления: однократные, многократные;
д) по характеру возникновения: внезапные, постепенные;
е) по математическим моделям: параметрические, сигнальные;
ж) по видам проявления: обрывы, короткие замыкания, дрейф, переориентация, изменение эффективности.
Задачи диагностирования по следующей схеме (рис. 9.):
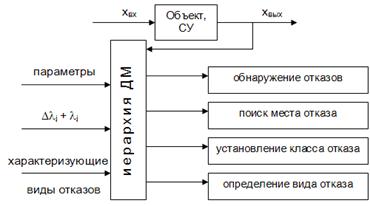
Рис. 9. Схема диагностирования по отказам
Для диагностики моделей используется (см. классификацию) множество физических видов отказов – диагностических признаков.
В качестве прямых диагностических признаков соответствующего отказа используют Dli = li- liном – отклонение диагностического параметра li от номинального значения. Косвенные диагностические признаки оценивают через отклонение величины xвых – выходного сигнала объекта (системы).
Разработка диагностического обеспечения системы управления или объекта идет по следующей схеме (рис. 10.):
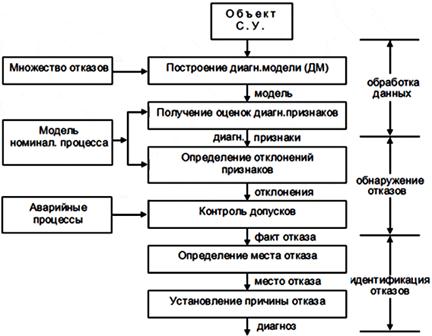
Рис. 10. Схема разработки диагностического обеспечения системы управления или объекта
Математическая постановка задачи технического диагностирования объекта (системы управления)Пусть:
а) задана система линейная с постоянными характеристиками на отдельном отрезке времени стационарная, работающая в номинальном режиме;
б) задано множество контрольных точек;
в) задано множество физических отказов с характеристикой отказов;
г) задано множество тестовых и рабочих сигналов управления;
д) задано время диагностирования ОУ (СУ).
Требуется:
Провести техническое диагностирование ОУ (СУ) в целях контроля технического состояния – обнаружение отказов, поиск места и определение причин отказа.
При вероятностных методах распознавания технического состояния системы вероятность постановки диагноза ![]() , где Ni – число состояний объекта из общего числа состояний N, у которых имел место диагноз Di, а P(kj/Di) – вероятность появления диагностического признака kjу объекта с диагнозом Di. Если среди Niсостояний объектов, имеющих диагноз Di, у Nij появился признак kj, то
, где Ni – число состояний объекта из общего числа состояний N, у которых имел место диагноз Di, а P(kj/Di) – вероятность появления диагностического признака kjу объекта с диагнозом Di. Если среди Niсостояний объектов, имеющих диагноз Di, у Nij появился признак kj, то
![]()
Вероятность появления диагностического признака kjво всех состояниях объекта N независимо от их диагноза с учетом того, что kj появляется только в Nj состояниях объекта, равна:
![]() .
.
Из изложенного выше вытекает, что вероятность совместного появления следующих событий: наличия у объекта диагноза Di и диагностического признака kj – равна:
![]() .
.
Отсюда:
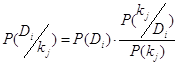 – формула Байеса.
– формула Байеса.
Формула Байеса неточно отражает реальное положение при постановке диагноза Di при наличии диагностического признака kj. Дело в том, что в этой формуле априорно (без доказательства, заранее) принято, что все диагностические признаки имеют равную вероятность появления в реальных условиях работы системы, при этом не учитывается информационная ценность того или иного диагностического признака.
Информационная ценность диагностического признака определяется количеством информации, которое вносит данный диагностический признак в описание технического состояния объекта управления (ОУ) или системы управления (СУ).
Количество информации связано с энтропией (степенью неопределенности) состояния системы, чем выше определенность состояния системы (меньше энтропия), тем меньше информации мы получим, изучая (диагностируя) эту систему (о ней и так почти все известно).
Энтропия (степень неопределенности) системы по Шеннону (разработчик теории информации) находят по формуле:
![]()
где H(A) – энтропия системы A; P(Ai) – вероятность Ai состояния системы А.
Количество информации определяется как разность энтропии системы в 2-х различных состояниях:
J = H(A1) – H(A2),
где J – количество информации, H(A1) – энтропия 1-го состояния, H(A2) – энтропия 2-го состояния системы.
Список литературы
1. Льюнг Леннарт. Идентификация систем. – М.: Наука, 191.
2. Интеллектуальные системы автоматического управления. / Под ред. И.М. Макарова, В.М. Лохина – М.: Физматпит, 2001.
3. В.О. Толкачев, Т.В. Ягодкина. Методы идентификации одномерных линейных динамических систем. – М.: МЭИ, 197.
4. К.А. Алексеев. Моделирование и идентификация элементов и систем автоматического управления. – Пенза, 2002.
5. Дочф Ричард, Вишоп Роберт. Современные системы управления. – М.: Юнимедиастайп, 2002.
6. С.В. Шелобанов. Моделирование и идентификация систем управления. – Хабаровск, 199.
7. К.В. Егоров. Основы теории автоматического регулирования. – М.: Энергия, 167.
Похожие работы
... , а 3 формируется путем умножения построчно колонок 1 и 2. Модель в абсолютных единицах после определения коэффициентов записывается в виде Динамическая идентификация Многие технологические объекты управления, функционирование которых в динамике еще недостаточно изучено, не могут быть описаны аналитически. Для получения их динамических моделей также применяются экспериментальные методы. ...
... и контроля убытков. При этом задействуется каждая из функций финансового менеджмента: планирование, организация, руководство и контроль. • Рассмотрим, например, роль планирования как функцию финансового менеджмента применительно к управлению финансовыми рисками. Одним из элементов внутрифирменного планирования является бизнес-план, в структуре которого имеется раздел — оценка рисков. Этот раздел ...
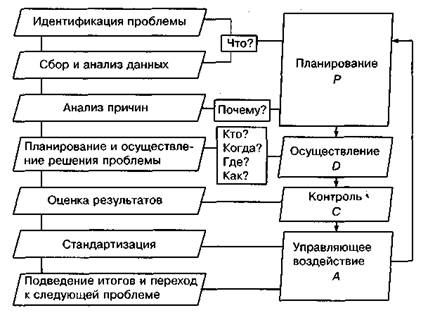

... 3. Управление качеством Управление любыми процессами является круговым циклом: планирование (plan, P) - осуществление ('do, D) - контроль (check, С) - управляющее воздействие (action, Л). Процесс управления качеством также можно представить как последовательность прохождения этих этапов. Цикл PDCA обеспечивает постоянное отслеживание и повышение уровня качества производства. Управление следует ...
... Возникшие потребности в научно обоснованных методах и средствах управления нашли свое выражение в кибернетике - науке об управлении и системном анализе, особым предметом исследования которых являются сложные и очень сложные системы окружающего мира. 4.4 Организационные системы Традиционно современная кибернетика рассматривала, в основном, простые и сложные управляемые системы, для которых ...
0 комментариев