Содержание
1. Волчок
2. Секстан Флерие
3. Почему волчок не падает
4. Рождение гироскопа
5. Гироскоп и его основные свойства
6. Некоторые сведения из механики
7. Гироскоп в авиации
7.1. Роль гироскопических приборов в самолетовождении
7.2. Гироскопический тахометр
7.3. Гироскопический указатель поворотов
7.4. Авиационный гироскоп направления
7.5. Авиационный гиромагнитный компас
7.6. Авиационный гироскопический горизонт
7.7. Автоматический штурман
1. Волчок
Внимание многих ученых и изобретателей привлекла древнейшая народная игрушка - волчок (рис.1), которой придавали самые различные формы (рис.2).
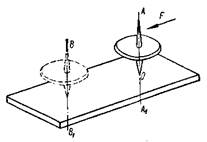
Рис.1. Волчок
Большей частью волчок приводили во вращение с помощью тонкой бечевки, предварительно намотанной на его вал. Быстро сдергивая бечевку с вала волчка, сообщали последнему вращение вокруг оси АА1, которое продолжалось до тех пор, пока силы трения, действующие в точке О опоры волчка о какое-либо основание, не прекращали его движение.
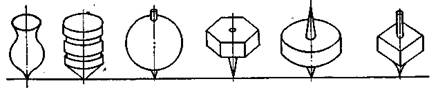
Рис.2 Различные формы волчков
Попытки повалить быстро вращающийся волчок на бок не удавались. Под действием толчка с силой волчок лишь отскакивал в сторону и продолжал вращаться вокруг вертикальной оси ВВ1, положение которой было лишь несколько смещено относительно первоначального направления АА1.
Удивительное свойство волчка сохранять неизменным направление оси АА1 своего вращения открывало широкие перспективы для его практического использования. В самом деле, если быстро вращающийся волчок, выполненный в виде диска, неизменно выдерживает вертикальное положение, то вращение самого диска будет происходить строго в горизонтальной плоскости. Возникла непосредственная возможность практического осуществления искусственного горизонта.
Изучением законов движения волчка занялись многие ученые мира. Над этой задачей работал и знаменитый английский ученый И. Ньютон (1642 - 1727) и член Российской академии наук Л. Эйлер (1707 - 1783). Эйлер в 1765 г. впервые опубликовал теорию движения твердого тела около неподвижной точки его опоры и тем самым создал теоретическую базу для дальнейшего более глубокого изучения законов движения волчка. Работы французских ученых Ж. Лагранжа (1736-1813) и Л. Пуансо (1777 - 1859) во многом содействовали дальнейшему изучению и разработке методов практического использования свойств быстро вращающегося волчка.
2. Секстан Флерие
В 1886 г. французский адмирал Флерие предложил новый прибор - секстан - для измерения географической широты местоположения корабля во время шторма, основой которого являлся быстро вращающийся волчок. Сам волчок был выполнен в виде цилиндрического тела В (рис.3), подпертого остроконечной шпилькой на точке N. Во время работы прибор удерживали за рукоятку%R в вертикальном положении. С помощью ручного насоса во внутрь его через шланг М накачивали сжатый воздух, который ударял направленными струями в боковую поверхность волчка и приводил его во вращение вокруг оси ААХ. При весе волчка в 175 г удавалось сообщить ему вращение со скоростью около 3000 об/мин. Для обеспечения вращения волчка неизменно в горизонтальной плоскости его центр тяжести располагали примерно на 1 мм ниже точки опоры. Приведенный во вращение волчок даже при отклонениях рукоятки от вертикального положения продолжал оставаться в горизонтальной плоскости, обеспечивая на качающемся корабле искусственный горизонт.
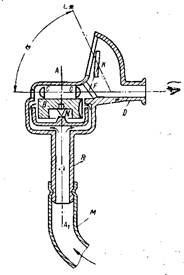
Рис. 3. Схема секстана Флерие
Для удобства фиксирования плоскости горизонта на верхней торцовой поверхности волчка были укреплены две плосковыпуклые линзы С, на плоских поверхностях которых нанесены тонкие штрихи, расположенные параллельно торцовой поверхности волчка. Расстояние между линзами С соответствовало фокусному, вследствие чего при вращении волчка В штрихи, нанесенные на линзах, для глаза, наблюдающего в окуляр D прибора, сливались в одну черту. Эта черта и фиксировала положение плоскости горизонта, по отношению к которой измерялся угол а высоты светила L, аналогично тому, как это было описано выше (см. рис.4).
Для одновременного наблюдения за линией искусственного горизонта и светилом в приборе было установлено два зеркала F и К. Поворотом зеркала К луч, идущий от светила L, совмещали с линией искусственного горизонта. При этом величина угла а определялась углом поворота зеркала К.
Такова вкратце схема первого прибора, в котором был использован волчок, по своей форме и устройству принципиально не отличающийся от обычных волчков, имевших широкое распространение в быту.
3. Почему волчок не падает
Небольшая вершина, которую мы покорили, прочитав и усвоив предыдущую главу, позволяет нам ответить на вопрос, вынесенный в заголовок.
Представим себе какой-либо волчок, например то, что описан в начале книги, - тонкий латунный диск (шестеренка), насаженный на тонкую стальную ось Этот вариант волчка изображен на рис.4.
Пусть вас не пугает сложность рисунка, она кажущаяся. Ведь сложное - всего лишь недостаточно понятое. Некоторые усилия и внимание - и все станет простым и ясным.
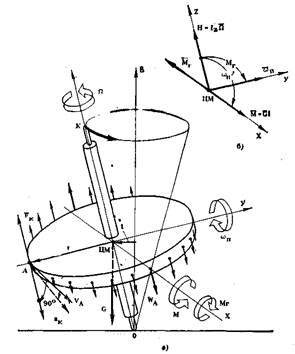
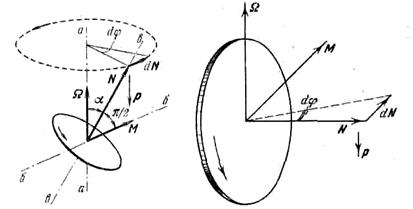
Рис.4. Схема, поясняющая возникновение прецессии, гироскопического момента и характера движении полчка
Возьмем прямоугольную систему координат хуz и поместим ее центр в центр масс полчка, то есть в точку ЦМ. Пусть ось z проходит через ось собственного быстрого вращения волчка, тогда оси хуz будут параллельны плоскости диска и лежать внутри него. Договоримся, что оси хуz участвуют во всех движениях волчка, кроме его собственного быстрого вращения.
В правом верхнем углу (рис.4, б) изобразим такую же систему координат хуz. Она нам понадобится в дальнейшем для разговора на "языке" векторов.
Сначала не будем раскручивать волчок, и попытаемся его поставить нижним концом оси на опорную плоскость, например на поверхность стола. Результат не обманет наших ожиданий: волчок обязательно упадет на бок. Почему это происходит? Центр масс волчка (точка ЦМ) лежит выше точки его опоры (точки О). Сила веса G волчка, как мы уже знаем, приложена в точке ЦМ. Поэтому любое малое отклонение оси z волчка от вертикали В обусловит появление плеча силы G относительно точки опоры О, то есть появление момента М, который и повалит волчок в направлении своего действия, то есть вокруг оси х.
Теперь раскрутим волчок вокруг оси z до большой угловой скорости Ω. Пусть по-прежнему ось z волчка отклонена от вертикали В на малый угол, т.е. на волчок действует тот же момент М. Что же изменилось теперь? Как мы увидим дальше, изменилось многое, а вот в основе этих изменений лежит тот факт, что теперь каждая материальная точка i диска уже имеет линейную скорость V, обусловленную вращением диска с угловой скоростью Ω.
Выделим одну точку в диске, например точку А, имеющую массу mA и лежащую в средней плоскости диска на расстоянии г от оси вращения (г - радиус диска). Рассмотрим особенности ее движения за один оборот.
Итак, в начальный момент времени точка А, как и все другие точки диска, имеет линейную скорость, вектор которой VА лежит в плоскости диска. На волчок (и его диск) действует момент М, который пытается* опрокинуть волчок, придав точкам диска линейные скорости, векторы которых Wi перпендикулярны плоскости диска.
Под действием момента М точка A начинает приобретать скорость WA. В силу закона инерции скорость материальной точки мгновенно нарасти никак не может. Поэтому в начальном положении (точка А находится на оси у) ее скорость WA=0, и только через четверть оборота диска (когда точка А, вращаясь, будет уже находиться на оси х) ее скорость WA возрастает и станет максимальной. Это значит, что под действием момента М вращающийся волчок поворачивается вокруг оси у, а не вокруг оси х (как это было с нераскрученным волчком). В этом явлении начало разгадки тайны волчка.
Поворот волчка под действием момента М называется прецессией, а угловая скорость поворота - скоростью прецессии, обозначим ее ы п. Прецессируя, волчок начал поворот вокруг оси у.
Это движение является переносным по отношению к собственному (относительному) вращению волчка с большой угловой скоростью Ω.
В результате переносного движении вектор относительной линейной скорости VA материальной точки A, уже возвратившейся и начальное положение, окажется повернутым в сторону переносного вращении.
Таким образом, возникает уже знакомая нам картина влияния переносного движения на относительное, влияния, рождающего Кориолисово ускорение.
Направление вектора Кориолисова ускорения точки А (в соответствии с правилом, приведенным в предыдущей главе), найдем, повернув вектор относительной скорости VА точки А на 90° в сторону переносного (прецессионного) вращения волчка. Кориолисово ускорение ак точки A, имеющей массу тА, порождает силу инерции FK, которая направлена противоположно вектору ускорения aк и приложена к материальным точкам диска, соприкасающимся с точкой A.
Рассуждая подобным образом, можно получить направления векторов Кориолисова ускорения и силы инерции для любой другой материальной точки диска.
Вернемся к точке А. Сила инерции FK на плече r создает момент МГА, действующий на волчок вокруг оси х. Этот момент, порожденный Кориолисовой силой инерции, называется гироскопическим.
Его величину определяют помощью формулы:
МГА = rFk= mAr2 ΩωП = IA Ω ωП
Величину IA = mAr2, зависящую от массы точки и ее расстояния от оси вращения, называют осевым моментом инерции точки. Момент инерции точки является мерой ее инертности во вращательном движении. Понятие момента инерции было введено в механику Л. Эйлером.
Моментами инерции обладают не только отдельные точки, но и целые тела, поскольку они состоят из отдельных материальных точек. Имея это в виду, составим формулу для гироскопического момента МГ, создаваемого диском волчка. Для этого в предыдущей формуле заменим момент инерции точки IA на момент инерции диска IД, а угловые скорости Ω и ωП оставим прежними, так как все точки диска (за исключением тех, что лежат соответственно на осях гну) вращаются с одинаковыми угловыми скоростями Ω и ωП.
Н.Е. Жуковский "отец русской авиации", занимавшийся также и лучением механики волчков и гироскопов, сформулировал следующее простое правило для определения направления гироскопического момента (рис.4, б): гироскопический момент стремится совместить вектор кинетического момента Н с вектором угловой скорости переносного вращения ωП по кратчайшему пути.
В частном случае скоростью переносного вращения является скорость прецессии.
На практике пользуются также аналогичным правилом для определения направления прецессии: прецессия стремится совместить вектор кинетического момента Н с вектором момента физических сил М по кратчайшему пути.
Эти простые правила лежат в основе гироскопических явлений, и мы ими будем широко пользоваться в дальнейшем.
Но вернемся к волчку. Почему он не падает, поворачиваясь вокруг оси х, ясно - препятствует гироскопический момент. Но может быть, он упадет, поворачиваясь вокруг оси у в результате прецессии? Тоже нет! Дело в том, что, прецессируя, волчок начинает поворачиваться вокруг оси у, а это значит, что сила веса G начинает создавать момент, действующий на волчок вокруг этой же оси. Такая картина нам уже знакома, с нее мы начинали рассмотрение поведения вращающегося волчка. Стало быть, и в этом случае возникнут процессия и гироскопический момент, которые не позволят волчку долго наклоняться вокруг оси у, а переведут движение волчка в другую плоскость, и которой нее явлении повторятся снова.
Таким образом, пока угловая скорость собственного вращения волчка Ω велика, момент силы тяжести вызывает прецессию и гироскопический момент, которые удерживают волчок от падении в каком либо одном направлении. Этим объясняется устойчивость оси r вращения волчка. Допуская некоторые упрощения, можно считать, что конец оси волчка, точка К движется по окружности а сама ось вращения z описывает в пространстве конические поверхности с вершинами в точке О.
Вращающийся волчок представляет собой пример движения тела, имеющего одну неподвижную точку (у волчка это точка О). Задача о характере движения такого тела сыграла важную роль в развитии науки и техники, ее решению посвятили свои труды многие выдающиеся ученые.
4. Рождение гироскопа
Получив медицинское образование, Жан Бернар Леон Фуко (1819 - 4868) увлекся экспериментальной физикой и достиг в этой области немалых успехов. Назовем лишь самые крупные - токи Фуко, маятник Фуко, гироскопы.
Слово "гироскоп", придуманное Л. Фуко, состоит из двух греческих слов: "гирос" - вращение и "скопео" - наблюдать, смотреть.
Итак, гироскоп - это "наблюдатель вращения". Сейчас гироскопы "наблюдают" вращение самых разнообразных объектов - кораблей, самолетов, ракет, спутников и многих других. Л. Фуко, создавая свой лабораторный прибор (гироскоп), хотел с его помощью наблюдать вращение Земли относительно абсолютного пространства.
Идея прибора основывалась на теоретическом положении Л. Эйлера о том, что быстровращающееся тело, имеющее одну неподвижную точку и не подверженное действию моментов внешних сил, сохраняет неизменным положение оси своего вращения в абсолютном пространстве. Л. Фуко рассуждал примерно так. Поскольку Земля вращается в абсолютном пространстве, то должно наблюдаться движение предметов, расположенных на ее поверхности, по отношению к оси такого быстровращающегося тела.
Приступая к созданию своего прибора, Л. Фуко сразу же столкнулся с тремя взаимосвязанными проблемами, ставшими потом классическими в гироскопической технике:
1) как практически реализовать тело, имеющее одну неподвижную точку и, стало быть, свободу вращения вокруг трех взаимно перпендикулярных осей;
2) как раскрутить это тело вокруг одной из его осей и в дальнейшем поддерживать высокое значение угловой скорости;
3) как "защитить" вращающееся тело от действия внешних возмущающих моментов,
В качестве тела, предназначенного для быстрого вращения, Л. Фуко выбрал маховик, который был установлен в кардановом подвесе.
Прежде чем объяснить, как устроен карданов подвес, широко применяющийся в технике и в наше время, стоит сказать несколько слов о человеке, чье имя он носит.
Джероламо Кардано (1501 - 1576) - итальянский философ, врач, математик и техник - легендарная личность. Хилый от рождения, он был могуч духом п очень хотел прославиться.
Обладал выдающимися способностями и редким трудолюбцем; жил активно - участвовал в научных диспутах, рьяно занимался медициной и физкультурой, азартно играл в шахматы и кости, много писал, работал с наслаждением.
В своей книге "О моей жизни..." Д. Кардано, подводя итог сделанному, написал: "Число разрешенных мною проблем и вопросов доходит до 40 тысяч; и более мелких указаний я оставляю после себя до 200 тысяч. Вот основания, почему светоч нашей отчизны (Андреа Альчиати - видный юрист начала XVI в. - Ред) назвал меня "мужем открытий".
Однако этот "муж открытий" был не очень щепетилен в вопросах приоритета, и многие истины, известные и до него (сознательно или искренне заблуждаясь, теперь не установить), публиковал под своим именем. В частности, это относится и к карданову подвесу, который еще в XIII в. был описан французским архитектором Уйларсом де Гонкуром.
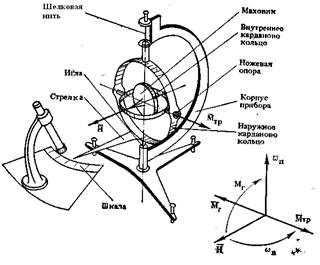
Рис.5. Схема модели первого гироскопа Л. Фуко, 1852 г.
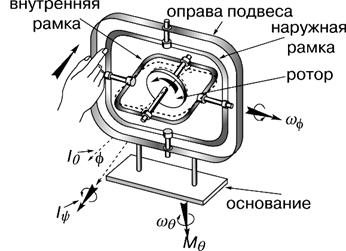
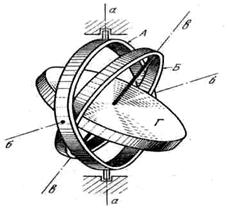
В настоящее время разработано много кинематических схем карданова подвеса, широко применяемых в гироскопической технике. Однако мы вернемся к тому варианту, который применил в своем приборе.Д. Фуко (рис.5). Ось вращения маховика на подшипниках была установлена в кольце, полуоси которого были выполнены в виде трехгранных призм ("ножей"). Ось вращения ножевых опор составляла прямой угол с осью вращения маховика. Стальные полированные "подушки", №а которые опирались грани ножей, были установлены в другом кольце. Это кольцо сверху с помощью шелковой нити подвешивалось к корпусу прибора, а снизу упиралось в корпус иглой. Для наблюдения за движением оси вращения маховика относительно поверхности Земли на кольце была укреплена длинная стрелка (поверхность Земли в данном приборе представляла подставка прибора со шкалой). Кольца называются соответственно внутренним и наружным кардановыми кольцами. Эти два кольца вместе с установленными на них опорами образуют механическую систему, называемую кардановым подвесом. Карданов поднес позволяет установленному в нем телу одновременно поворачиваться вокруг трех взаимно перпендикулярных осей (обеспечивает телу три вращательные степени свободы). Так, например, маховик, установленный в приборе Л. Фуко, мог вращаться вокруг собственной оси (первая степень свободы), вместе с внутренним кольцом карданова подвеса мог поворачиваться вокруг осп ножевых опор (вторая степень свободы) и вместе с внутренним и наружным кольцами карданова подвеса мог поворачиваться вокруг вертикальной оси, слегка закручивая шелковую нить (третья степень свободы).
В своем приборе Л. Фуко постарался в максимальной степени выполнить условия Эйлера: вращающееся тело (маховик) имело одну неподвижную точку, а именно точку пересечения осей маховика, внутреннего и наружного кардановых колец; чтобы свести к минимуму возмущающие моменты, действующие на маховик, были применены самые совершенные из известных тогда опор - ножевые опоры и шелковая нить; узел "маховик - внутреннее кольцо" был тщательно отбалансирован, то есть центр масс узла был совмещен с неподвижной точкой, что в отличие от волчка сводило к пулю момент, создаваемый силой тяжести самого узла. Отмечая низкий уровень возмущающих моментов, Л. Фуко писал, что подвижные узлы прибора "приходили в движение от малейшего дуновения".
Почему так много внимания уделил Л. Фуко устранению моментов внешних сил? Что бы произошло, если бы вокруг осей карданова подвеса действовали бы достаточно большие возмущающие моменты, например моменты трения опор?
Предположим, что маховик раскручен и обладает кинетическим моментом Н, а вокруг оси внутреннего кольца карданова подвеса действует момент трения МTP, создаваемый ножевыми опорами.
Действие своего прибора Л. Фуко продемонстрировал членам Парижской академии наук 27 сентября 1852 г.
С помощью специального устройства маховик был приведен н быстрое вращение и дальше работал на выбеге. Ось вращения маховика была выставлена в плоскость горизонта (направлена горизонтально). Стрелка, связанная с наружным кардановым кольцом, установлена на нулевой отметке шкалы.
Ожидалось, что ось маховика начнет совершать кажущийся поворот вокруг вертикальной оси прибора со скоростью, равной вертикальной составляющей скорости вращения Земли на широте Парижа.
Так как ожидался достаточно медленный поворот стрелки, то для наблюдения за ее движением применялся микроскоп. Опыт удался частично: только в первые минуты после запуска маховика стрелка действительно двигалась справа налево, а затем движение ее становилось хаотичным. Объяснялось это тем, что маховик слишком быстро терял скорость вращения и даже незначительные возмущающие моменты трения ножевых опор вызывали хаотическую прецессию оси маховика в плоскости горизонта.
Уже первые опыты обнаружили еще одно интересное свойство гироскопа - практическую безинерционность прецессионного движения маховика. Если к маховику мгновенно приложить и спять момент внешних сил (па-пример, слегка ударить молоточком но внутреннему кольцу карданова подвеса), то также практически мгновенно возникнут и исчезнут угловая скорость прецессии и гироскопический момент (явления, связанные с квазиупругим эффектом, здесь не рассматриваются). В результате внутреннее кольцо не повернется вокруг своей оси. Всякое другое материальное тело в подобной ситуации продолжало бы двигаться по инерции, отклоняясь все дальше от начального положения.
У маховика гироскопа движение по инерции также есть, но оно. выражается не в одностороннем отклонении от начального положения, а в мелком, быстро затухающем дрожании около этого положения.
Мелкое, быстро затухающее дрожание маховика называется нутацией, что в переводе с латинского языка означает "колебание".
В своих докладах Парижской академии наук Д. Фуко указал также на то, что маховик его прибора, лишенный одной степени свободы, должен стремиться совместить ось своего вращения с вектором абсолютной переносной скорости вращения основания. Теперь этот результат легко можно получить с помощью правила И.Е. Жуковского, во времена же Д. Фуко это было неожиданным открытием. Впечатление еще более усилилось, когда Л. Фуко пояснил, что с помощью гироскопа, имеющего только дне степени свободы, можно определять направление па Северный полюс Земли и широту места установки прибора. Представим себе гироскоп, маховик которого имеет только две степени свободы, а именно: вращение с большой скоростью вокруг собственной оси и возможность поворота вокруг оси внутреннего карданова кольца. Позже подобные приборы стали называться гироскопами с двумя степенями свободы, или двухстепенными гироскопами. Л. Фуко рассмотрел два характерных положения двухстепенного гироскопа относительно поверхности вращающейся Земли.
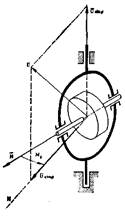
Рис.6. Гирокомпас Л. Фуко
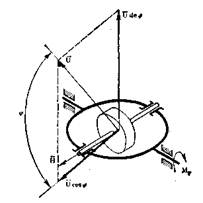
Рис.7. Гироширот Л. Фуко
Мерное: ось внутреннего кольца карданова подвеса вертикальна, и гироскоп участвует в переносном вращении Земли со скоростью U, вектор которой может быть разложен на две составляющие Ūsinφ и Ūcosφ (рис 6). В этом случае в соответствии с правилом Н.Е. Жуковского возникают два гироскопических момента. Один из них будет стремиться совместить вектор Н с вектором Ūsinφ. Но этого совмещения не произойдет, так как на пути совмещения стоят опоры внутреннего кольца карданова подвеса. Этот момент будет создавать лишь давление на опоры.
Другой гироскопический момент будет стремиться совместить вектор Н с вектором Ūcosφ. Это совмещение, возможно, так как опоры допускают поворот маховика вокруг вертикальной оси. Совершая затухающие колебания в горизонтальной плоскости, ось вращения маховика через некоторое время совместится с направлением вектора Ūcosφ. Но ведь вектор Ūcosφ лежит в плоскости меридиана и направлен на Северный полюс Земли! Значит, материальное тело - ось вращения маховика - также будет направлено на Северный полюс Земли. Получился компас, который в отличие от магнитного компаса указывает направление по на магнитный, я на географический полюс Земли.
Этот прибор позднее был нашли гироскопом Фуко первого; рода, или гирокомпасом Фуко.
Второе положение гироскопа: ось внутреннего кольца адрданова подноса горизонтальна, а ось маховика расположена в плоскости меридиана (рис 7). В этом случае также возникнет гироскопический момент, который совместит вектор Н с вектором U. В совмещенном положении угол между осью вращения маховика и горизонтальной плоскостью оказывается равным широте φ. Этот прибор позднее был назван гироскопом Фуко второго рода, или гироширотом.
Таким образом, особым свойством двухстепенного гироскопа является его способность мгновенно реагировать на угловую скорость вращения основания, на котором он установлен, пытаясь совместить по кратчайшему пути ось вращения маховика (вектор кинетического момента) с соответствующей составляющей вектора угловой скорости вращения основания.
Лишив трехстепенной гироскоп одной степени свободы, Л. Фуко открыл замечательное свойство двухстепенного гироскопа.
Ну а если пойти дальше и лишить маховик гироскопа второй степени свободы, не получим ли мы притом каких-либо полезных эффектов? Получим.
Уже давно известно, что вращающийся маховик способен запаса и, кинетическую энергию, которую затем он может расходовать на приведение и действие различных механизмов и па повышение плавности их работы.
В частности, всем знакомы детские игрушки инерционные автомобильчики. Чиркнув пару раз колесами такого автомобиля по полу, раскручивают маховичок, установленный внутри него. А затем уж маховичок, отдавая свою энергию колесам автомобиля, заставляет его двигаться.
Эта идея используется не только в игрушках.
Сегодня разрабатываются транспортные средства с экологически чистыми маховичными двигателями. Уже по улицам городов движутся опытные образцы троллейбусов и автобусов, приводимые в движение энергией маховиков.
Возникают ли гироскопические моменты в маховичных приводах? Конечно, возникают, но так как, кроме собственного вращения, других степеней свободы маховик не имеет, то и его видимого движения не наблюдается.
Гироскопические моменты в этом случае оказывают лишь давление на опоры маховика, что является отрицательным явлением.
Таким образом, хотя маховичные приводы - очень полезные устройства, к гироскопическим приборам они прямого отношения не имеют.
Итак, в своих работах Л. Фуко указал на принципиальную возможность создания гироскопических приборов трех различных назначений: свободного гироскопа, способного хранить неизменной ориентацию оси маховика в абсолютном пространстве, гироскопического компаса, гироскопического измерителя широты.
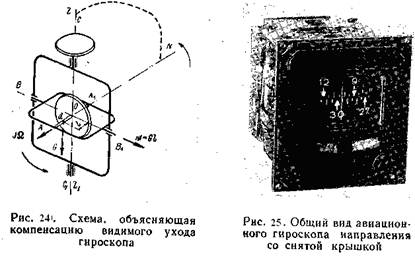
5. Гироскоп и его основные свойстваОбнаруженное свойство волчка открывало интереснейшие перспективы его использования. Представим себе, что мы наблюдаем за земным шаром со стороны его Северного полюса N из мирового пространства (рис.8).
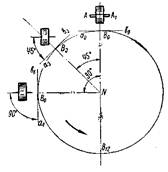
Рис.8. Отклонение гироскопа с течением времени от плоскости горизонта
Предположим также, что в начальный момент времени мы увидели волчок установленным на экваторе в точке Во, причем его главная ось АА1 направлена с запада на восток и расположена горизонтально. Вследствие суточного вращения Земли точка В0 непрерывно изменяет свое положение. По прошествии трех часов она переместится в точку В3, через шесть часов - в точку В6, через двенадцать - в точку В12 и т.д. пока вновь не вернется в исходное положение по истечении 24 часов. Известно, что в любой точке на земной поверхности плоскость горизонта перпендикулярна радиусу земного шара (т.е. плоскость горизонта изменяет с течением времени свое положение в мировом пространстве). Поэтому для наблюдающего из мирового пространства ее положение для точки земной поверхности, расположенной на экваторе, будет казаться прямой линией. Так, в точке В0 это будет прямая а0b0, в точке В3 - прямая а3b3, в точке В3 - прямая а6b6 и т.д.
В суточном вращении Земли участвует и точка подвеса волчка, закрепленная с помощью кардановых колец неподвижно на земной поверхности.
Главная ось такого волчка не сохранит неизменного положения относительно плоскости горизонта. Оставаясь стабильной и мировом пространстве, главная ось АА1 волчка отклонится от плоскости горизонта. Причем угол этого отклонения будет равен углу поворота земного шара.
Следовательно, наблюдатель, находящийся на земной поверхности рядом с волчком в кардановом подвесе, сможет по отклонению его главной оси от плоскости горизонта определить угол поворота земного шара около своей оси.
Прибор Фуко дал возможность непосредственно наблюдать суточное вращение Земли, поэтому и был назван гироскопом.
Быстро вращающийся гироскоп оказывает значительное сопротивление любым попыткам изменить его положение в пространстве. Если воздействовать на его наружное кольцо НК (рис.9) силой F, пытаясь повернуть гироскоп вокруг оси СС1, то можно убедиться в сопротивлении гироскопа внешнему усилию.
Гироскоп начнет поворачиваться не вокруг оси СС1 а вокруг оси ВВ1. в направлении, указанном стрелкой. Скорость вращения гироскопа вокруг оси ВВ1 будет тем больше, чем больше сила F.

Рис.9. Сопротивляемость гироскопа внешним усилиям
Одновременно были обнаружены и другие интересные свойства гироскопа. Опыты показали, что, затягивая винты d, расположенные на наружном кольце НК, и лишая тем самым гироскоп свободы вращения вокруг оси ВВ1, создают условия, при которых гироскоп будет стремиться совместить свою главную ось АА1 с плоскостью меридиана. Для этого необходимо главную ось гироскопа предварительно установить в плоскость горизонта. Если же затянуть винт d1, расположенный на корпусе К прибора, и лишить тем самым гироскоп свободы вращения вокруг оси СС1 то главная ось АА1 при условии ее предварительного совмещения с плоскостью меридиана, будет стремиться к совмещению с линией, параллельной оси мира.
Для уяснения природы многообразных свойств гироскопа обратимся к некоторым основным понятиям и законам механики.
6. Некоторые сведения из механики
Удивительное на первый взгляд свойство гироскопа двигаться в направлении, перпендикулярном действующему на него усилию, полностью подчинено законам механики. Оно объясняется инертностью массы гироскопа, присущей ему, как и любому другому телу.
Наблюдения и опыты показывают, что изменение скорости и направления движения любого тела не может происходить само по себе без воздействия на него внешних сил. Согласно закону Ньютона любое тело, если на него не действуют другие тела, сохраняет состояние покоя или прямолинейного и равномерного движения.

Рис.10. Различные виды движения тел
Свободно движущееся тело А (рис.10) стремится сохранить свое движение с постоянной скоростью v в прямолинейном направлении аb. На схеме скорость v изображена вектором в виде отрезка прямой nl, совпадающей с направлением движения ab. Стрелка на конце вектора указывает, в какую сторону по этому направлению движется тело. Длина nl вектора в условном масштабе изображает величину скорости v.
Ньютон установил также, что ускорение w тела, характеризующее изменение скорости его движения, пропорционально действующей на тело силе F и обратно пропорционально массе этого тела т, равной весу тела G, деленному на ускорение свободного падения g. Этот вывод, имеющий всеобщий характер, носит название второго закона Ньютона и может быть выражен формулой
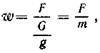
из которой следует, что сила F, необходимая для сообщения телу ускорения до, равна массе т тела, умноженной на ускорение,
F = mw (1)
Из уравнения (1) следует, что для изменения скорости и направления движения тела необходимое внешнее усилие должно быть тем больше, чем больше масса тела и чем больше ускорение последнему должно быть сообщено.
Таким образом, именно масса тела обладает инертностью, или, иначе говоря, свойством сохранять свое состояние движения неизменным, которое может являться и состоянием покоя и состоянием равномерного и прямолинейного движения.
В описанном проявлении инертности массы и заключается сущность основного закона, которому движение гироскопа подчинено в такой же мере, как и движение любого другого тела.
Если на тело А, движущееся по прямой ab со скоростью у0 (рис.10), подействовать в направлении его движения силой F, то по истечении весьма малого промежутка времени оно будет продолжать двигаться в прежнем направлении ab, но уже с новой скоростью vt.
Изменение скорости движения тела за время At и характеризует его ускорение:
![]()
Измеряя скорость в сантиметрах в секунду (см/сек), ускорение будем оценивать в сантиметрах в секунду в квадрате (см/сек2).
В общем случае под воздействием внешней силы тело может изменить одновременно и скорость и направление своего движения. Представим себе, что на тело А, движущееся в направлении ab со скоростью v0, подействовала сила F2, направленная по линии cd, перпендикулярной ab. Под влиянием этого усилия тело получит ускорение в направлении cd, в результате чего по прошествии времени Δt оно, кроме скорости v0 в направлении ab, приобретет некоторую дополнительную скорость v2 в направлении cd.
Нетрудно определить новое направление и вычислить новую скорость v' движения рассматриваемого тела. Как известно, направление движения будет определяться направлением диагонали параллелограмма, стороны которого равны векторам v0 и и2, а значение суммарной скорости - длиной этой диагонали, вычисленной в соответствии с масштабом, принятым для построения векторов у0 и и2.
Для получения ясного представления о сущности проявления основного закона движения при опытах с гироскопическими приборами необходимо выяснить возможные перемещения гироскопа в пространстве.
Движение гироскопа можно рассматривать состоящим из его вращения вокруг трех осей подвеса (рис.11). В этом случае необходимо знать величину и направление скоростей его вращения вокруг каждой из этих осей в отдельности.
Скорость вращения тел измеряют обычно либо числом оборотов в минуту, либо числом, радианов 1 в секунду. Скорость вращения в один радиан в секунду соответствует повороту рассматриваемого тела (рис.14) на угол φR, равный центральному углу, опирающемуся на дугу ab, длина которой равна радиусу окружности R.
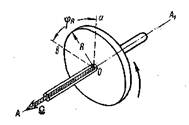
Рис.11. Схема вращения тела вокруг оси
Так, если рассматриваемое тело в течение 1 сек. совершит один оборот, т.е. повернется на 360°, то угловая скорость его вращения, выраженная в радианах в секунду, будет равна:
![]()
Если же тело в течение 1 мин. совершает π оборотов, то величина угловой скорости определится равенством
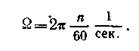
Но одна величина угловой скорости еще не дает полного представление о характере вращательного движения. Необходимо знать положение оси в пространстве, вокруг которой происходит вращение и направление самого вращения.
Для записи этих характеристик наиболее удобно изображать угловые скорости с помощью векторов. Обозначая угловую скорость Q вектором, мы должны совместить его с осью AA1 вращения тела и направить по оси АА1 в такую сторону, чтобы со стороны его конца вращение тела представлялось происходящим против часовой стрелки. Что касается величины угловой скорости Q, то она характеризуется длиной вектора, которая определяет в некотором масштабе ее численное значение.
Важно обратить внимание на тот факт, что ускорение, вызванное воздействием сил, оценивает изменение скорости не только по величине, но и по направлению. Для пояснения сказанного обратимся к рис.12, на котором материальная частица в виде шарика D соединена с помощью нерастяжимой нити OD длиной R с валом В электродвигателя ЭД, корпус которого неподвижно закреплен на фундаменте.
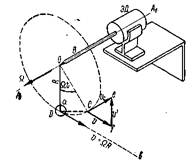
Рис.12. Схема для определения центростремительного ускорения
Как только вал двигателя начнет вращаться вокруг оси ААХ, шарик D также начнет перемещаться вокруг этой оси. Если вал двигателя вращается с постоянной угловой скоростью 2, то и шарик D будет двигаться с такой же по величине скоростью. Окружная скорость v = ΩR шарика D в этом случае постоянна, но все же его движение не остается равномерным и прямолинейным, так как изменяется направление его движения.
Действительно, если бы шарик D двигался равномерно с постоянной по величине скоростью v и прямолинейно, то, начиная, например, с момента совмещения центра шарика с точкой а, произошло бы его перемещение вдоль прямой ab. Но шарик движется по дуге окружности радиуса R. Поэтому в точке С направление скорости vc его движения будет уже отличным от направления скорости v, хотя численные их значения останутся равными.
Так как v и vc являются скоростями одного и того же непрерывно движущегося тела D, то очевидно, что скорость vc образовалась из первоначальной скорости v, получившей вследствие тех или иных причин некоторое изменение на величину v'. Скорости v и и' дают в геометрической сумме ту результирующую скорость vc, которой тело D будет обладать в точке С.
Учитывая, что треугольник Cfe (благодаря равенству скоростей v и vc) является равнобедренным и подобным треугольнику ОаС, у которого стороны Оа и ОС равны между собой и одновременно равны радиусу R, можно составить отношение между сторонами этих двух треугольников
Отрезки Сf и fe в выбранном масштабе выражают численные значения скоростей v и v'. Величина Оа равна радиусу R окружности, по которой происходит перемещение тела D. Кроме того, при малом значении угла Ωt поворота тела D вокруг оси ААХ длина дуги аС = RΩt будет практически равна длине хорды аС Учитывая сказанное, перепишем последнее отношение в следующем виде:
Таково значение той дополнительной скорости, которая была сообщена движущемуся шарику при повороте двигателя на угол Ωt. Эта дополнительная скорость v' и повлекла за собой изменение первоначальной скорости v. Относя величину v' изменения скорости движения ко времени t в течение которого это изменение произошло, мы найдем величину ускорения тела при его движении. Если угол поворота Ωt уменьшить до очень малого значения, близкого к нулю (т.е. рассматривать поворот тела за весьма малый промежуток времени kt), то нетрудно убедиться в том, что дополнительная скорость v' направлена вдоль радиуса R, иными словами к центру, поэтому рассматриваемое ускорение и получило название центростремительного.
Обозначая центростремительное ускорение wц, находим его значение:
Выше уже говорилось о том, что для сообщения телу ускорения на него необходимо воздействовать внешним усилием. В рассматриваемом случае (рис.15) это усилие совпадает по направлению с радиусом R и действует на тело D со стороны нерастяжимой нити 0D. В свою очередь тело D будет действовать на нить силой, равной по величине внешнему усилию, но обратной ему по направлению. Такие силы, развиваемые массой движущегося тела и оказывающие сопротивление внешним усилиям, называются силами инерции. Если прекратить связь между валом двигателя и телом, то с этого мгновения последнее перестанет двигаться по окружности и начнет перемещаться прямолинейно с постоянной скоростью.
Сказанное легко проверить на опыте. Используйте в качестве связи между валом В электрического двигателя ЭД и шариком D обычную суровую нитку. Приведите во вращение вал двигателя, а вместе с ним и шарик и дайте им набрать достаточно большую скорость, Приготовьте острую бритву и в тот момент, когда центр шарика D будет подходить к совмещению с точкой а, быстро перережьте нить. Шарик D сразу же прекратит движение по окружности и начнет перемещаться вдоль прямой ab, с которой в момент перерезывания нити был совмещен вектор v его скорости.
7. Гироскоп в авиации 7.1. Роль гироскопических приборов в самолетовождении
При полете самолета необходимо иметь точные данные о географических координатах тех пунктов земной поверхности, над которыми он в данный момент времени пролетает. Только при этом условии можно совершить полет по заранее заданному маршруту. На заре авиации, когда полеты самолетов производились только в хорошую, так называемую лётную погоду выполнение указанных условий не вызывало затруднений.
Так, например, если самолет должен был совершить перелет по маршруту, включающему в себя пункты А, В, С и D (рис.13), то летчик вначале выбирал направление на поселок А, затем на хутор В, после чего вел самолет вдоль реки до моста С, через нее, и дальше выдерживал направление полета вдоль железнодорожного полотна вплоть до достижения пункта D. Благодаря хорошей видимости летчики легко ориентировались по лежащей под ними местности, а, используя линию естественного горизонта, могли выдерживать полет в горизонтальной плоскости.
Однако с развитием авиации, увеличением дальности, скорости и высоты полетов уже нельзя было рассчитывать на выполнение перелетов только при лётной погоде. Действительно, при больших дальностях беспосадочных перелетов нельзя предполагать, что на всей трассе будет стоять ясная погода. На своем пути самолет может попасть в облачность, туман, дождь и другие условия, при которых земная поверхность окажется скрытой от наблюдений.
Характерная черта современной авиации - совершение полетов при отсутствии видимости земной поверхности. Пассажирские и почтовые самолеты должны совершать регулярные рейсы в любое время дня и ночи, при любой погоде, так как в противном случае, при выжидании лётной погоды будет теряться одно из основных преимуществ воздушного сообщения - скорость. Более того, полет сопровождается подчас отсутствием видимости и небесных светил. В таком случае летчик ведет машину "вслепую".
Для выполнения слепого полета по заранее намеченному маршруту самолет должен быть оборудован приборами, которые в течение всего времени указывали бы направление линии север-юг, называемой обычно полуденной и истинной вертикали. На первый взгляд такие требования могут быть обеспечены весьма простыми средствами. Достаточно, казалось бы, оборудовать самолет маятником и магнитной стрелкой, чтобы дать возможность летчику определить положение самолета относительно плоскостей горизонта и меридиана.
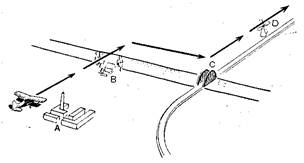
Рис.13. Схема полета самолета по земным ориентирам
Именно по этому пути использования магнитного компаса и маятникового креномера и пытались идти первые русские навигаторы. Так, еще в 1804 г. при полете Я.Д. Захарова с научными целями на воздушном шаре в его гондоле для определения направления движения был установлен магнитный компас.
Опираясь на опыт морского кораблевождения, русские авиаторы стремились оснастить свои воздушные корабли самыми совершенными в те времена навигационными приборами. А.Ф. Можайский при постройке своего первого в мире самолета, испытания которого происходили в России в 1882-1884 гг., предусмотрел установку на нем специально сконструированного магнитного компаса. Большую помощь А.Ф. Можайскому оказал крупнейший специалист компасного дела академик И.П. Колонга (1839-1902).
Русский самолет "Илья Муромец", первый полет которого состоялся в декабре 1913 г., имел 2 комплекта маятниковых креномеров и магнитные компасы; один для летчика и второй для штурмана. Опыт использования магнитного компаса на самолете "Илья Муромец" и явился началом развития самолетовождения по приборам.
Однако ни магнитная стрелка, ни маятник не могли в условиях полета, так же как и на качающемся корабле, сохранять свои положения неизменно совмещенными с направлениями полуденной линии и истинной вертикали. Это объясняется тем, что даже при прямолинейном полете вследствие атмосферных возмущений, случайных отклонений рулей, неравномерной работы двигателей и других причин самолет совершает непрерывные колебания вокруг своих осей (рис.14). Эти колебания порождают перемещения с ускорениями опор подвесов магнитной стрелки и маятника в корпусе самолета, обусловливая тем самым их отклонения от направлений полуденной линии и вертикали. Кроме того, при колебаниях самолета силы трения, неизбежно существующие в опорах подвесов, воздействуя на магнитную стрелку и маятник, увлекают их за поворотами самолета.

Рис.14. Схема самолета: 1 - продольная ось; 2 - вертикальная ось; 3 - поперечная ось
Все это, учитывая непрерывные колебания самолета, порождает и непрекращающиеся колебания маятника и магнитной стрелки около направлений вертикали и полуденной линии. Указанные обстоятельства затрудняют пользование рассмотренными приборами для определения углов крена самолета по отношению к плоскости горизонта и его курсовых углов относительно плоскости меридиана.
Таким образом, ни магнитная стрелка, ни маятниковый креномер не могли явиться надежными указателями положений плоскостей меридиана и горизонта. Вот почему возникла насущная потребность в создании принципиально новых приборов, которые бы в специфических условиях полета сохраняли неизменным свое положение относительно плоскостей горизонта или меридиана. Было сделано много попыток улучшения качества и магнитного компаса и маятникового креномера, однако ни одна из них не дала удовлетворительного решения. И только применение гироскопа позволило создать навигационные приборы, удовлетворяющие все возрастающим требованиям авиации.
Естественно, что внедрению гироскопа в самолетовождение во многом способствовал опыт морского флота, который к этому времени накопил достаточное количество материала по практическому использованию гироскопического компаса на море. Однако было бы ошибочным полагать, что авиация лишь позаимствовала у морского флота уже готовые гироскопические приборы. Малые габариты кабины самолета, высокие скорости его полета, ограничение веса
Для всех механизмов и приборов, устанавливаемых на самолете' исключали возможность использования, на нем морского гироскопического компаса, обладающего, как известно, значительными габаритами и весом.
Правда, в начале XX в. были предприняты попытки использовать гироскопический компас в авиации. Дирижабль "Италия", совершивший в 1928 г. полет к Северному полюсу, был оборудован гироскопическим компасом, однако эксперимент этот был неудачным. Дальнейших же попыток использования гироскопического компаса в авиации, как об этом можно судить по периодической печати, не предпринималось.
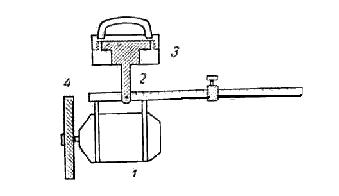
Самолетостроителям в этом вопросе пришлось идти самостоятельным путем. Без сомнения, установившиеся методы проектирования и технологические приемы изготовления гироскопических компасов были в полной мере использованы самолетостроителями, что и оказало решающее влияние на сравнительно быстрое внедрение гироскопических приборов в авиацию. Так, уже в первую мировую войну русские военные самолеты были оборудованы гироскопическими указателями горизонта (рис.15).
Рис.15. Авиационный гирогоризонт 1914 г.
Волчок прибора приводился во вращение сжатым воздухом, подаваемым внутрь прибора через патрубок с и отсасываемым оттуда через трубку d. Волчок описываемого прибора упирался одним концом своей оси, так называемой шпилькой, в подпятник или топку N (рис.16).
Верхняя часть оси ААХ вращения волчка оканчивалась небольшим плоским диском а, по положению которого относительно прозрачного сферического колпака Ь, неизменно связанного с самолетом, и выдерживался горизонтальный полет.
Русская авиация не только не отставала от зарубежных стран в деле использования гироскопических приборов на самолете, но часто являлась пионером их внедрения.
Так, например, в 1917 г. русские летчики А.Н. Журавченко и Г.Н. Алехнович совершили на самолете "Илья Муромец" слепой полет, выдерживая прямолинейный курс в заданном направлении по гироскопическому указателю поворотов, о принципиальном устройстве которого будет сказано ниже. Этот прибор, разработанный П.П. Шиловским специально для авиации, позволил провести самолет по заранее намеченному курсу при полном отсутствии видимости земных ориентиров.
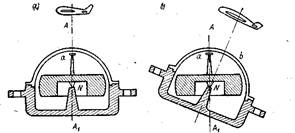
Рис.16. Схема, объясняющая принцип работы авиационного гирогоризонта 1914 г.: а-при горизонтальном полете; б-при наборе высоты
Работы советских ученых А.Н. Крылова, Б.В. Булгакова, С.С. Тихменева, Г.В. Коренева, А.Р. Бонина, Г.О. Фридлен-дера и многих других в содружестве с выдающимися конструкторами Е.Ф. Антиповым, Е.В. Ольманом, Р.Г. Чичикяном, А.И. Марковым и другими талантливыми инженерами обеспечили оснащение советской авиации высококачественными гироскопическими приборами.
В двадцатых годах текущего столетия в дополнение к указателю поворотов создаются авиационные гироскопические указатели, курса и горизонта, которые стали в настоящее время обязательными навигационными приборами самолета любого типа. В начале тридцатых годов советские конструкторы Д.А. Браславский, М.М. Качкачян и М.Г. Эйлькинд первыми в мире разработали, построили и испытали гиромагнитный компас, получивший в настоящее время широкое распространение в авиации всех стран мира.
Гироскопические приборы позволяют измерять углы, угловые скорости и ускорения при отклонении самолета от заданного направления.
Пользуясь гироскопическими приборами, определяют Линейные скорости и ускорения движения самолета. Наконец, они облегчают физический труд летчика, управляя полетом самолета автоматически.
7.2. Гироскопический тахометрКак упоминалось в предыдущем параграфе, одним из первых гироскопических приборов, использованных в авиации, был прибор, указывающий повороты самолета вокруг вертикали, или, как говорят, в азимуте. Чтобы разобраться в его принципиальной сущности, представим себе ротор гироскопа, быстро вращающийся. вокруг оси АА1 в кардановом кольце ВК (рис.17). Кольцо ВК, в свою очередь, может вращаться совместно с ротором вокруг оси ВВ^ в корпусе прибора, жестко укрепленном на основании N.
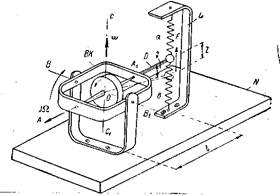
Рис.17. Принципиальная схема гиротахометра
На продолжении оси АА1 к кардановому кольцу ВК прикреплен стержень D, заканчивающийся шаровым наконечником, с которым соединены концы спиральных пружин а и b. Вторые концы этих пружин закреплены на кронштейне L, смонтированном также (на основании N. Благодаря наличию пружин свобода вращени5 гироскопа вокруг оси BBt его подвеса становится частично ограниченной, так как при повороте гироскопа вокруг оси ВВ1, пружинь будут деформироваться, создавая тем самым усилие, стремящееся возвратить гироскоп в исходное нулевое положение.
Если основание N поворачивать вокруг оси СС, с угловой скоростью ω, то вместе с основанием с такой же угловой скоростью а начнет поворачиваться и гироскоп. При этом последний будет поставлен в условия одновременного движения сразу вокруг двух осей: АА1 и CC1 с угловыми скоростями Ω и ω. В этом случае гироскоп начнет вращаться вокруг оси ВВ1 стремясь совместить свою главную ось АА1 с осью CC1 вынужденного поворота.
Вместе с гироскопом вокруг оси В1, будет поворачиваться и стержень D, шаровой наконечник которого начнет воздействовать на пружины а и b. Одна из пружин при этом будет растягиваться на величину z, вторая - на столько же сжиматься. В результате указанной деформации возникнет сила F упругости пружин, которая будет стремиться возвратить гироскоп к нулевому положению. С увеличением угла поворота ξ гироскопа вокруг оси ВВ1 деформация z пружин будет возрастать увеличивая силу F их упругости.
Угол поворота гироскопа b вокруг оси ВВ1 является пропорциональным величине угловой скорости вынужденного поворота прибора, так как кинетический момент JΩ и коэффициент k в каждом приборе остаются величинами постоянными. Следовательно, по величине угла с помощью данного прибора можно измерять угловую скорость. Именно поэтому он получил название гироскопического тахометра. Так как гироскоп прибора имеет только две степени свободы, вокруг осей АА1 и ВВ1 его называют еще гиротахометром с двумя степенями свободы.
Соединяя гироскоп тахометра со стрелкой (рис.18) и снабжая корпус прибора шкалой с нанесенной на ней в соответствующем масштабе сеткой делений, получают возможность произвести непосредственную оценку величины угловой скорости φ. Для успокоения колебаний стрелки гироскопического тахометра последний снабжают специальным успокоителем. В качестве такого успокоителя широкое распространение получил пневматический демпфер, представляющий собой жестко укрепленный на корпусе прибора цилиндр Ц, внутри которого помещен поршень П, соединенный
рычагом с гироскопом. При колебаниях гироскопа, а следовательно и стрелки прибора, около оси ВВ, поршень будет перемещаться внутри цилиндра. Этому оказывает сопротивление воздух, сжимаемый в цилиндре и не успевающий выходить через отверстие L. Указанное сопротивление будет тем больше, чем с большей скоростью происходит перемещение поршня П внутри цилиндра Ц.
Устанавливая описанный гироскопический тахометр на самолете, получают возможность измерять угловые скорости его поворота около одной из собственных осей (рис.14).
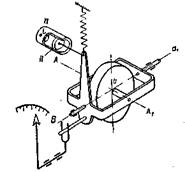
Рис.18. Схема передачи поворота гиротахометра на шкалу прибора
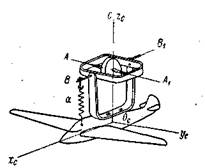
Рис. 19. Схема установки гиротахометра на самолете
Большей частью гироскопические тахометры используются на самолете для фиксирования его поворотов вокруг вертикальной оси. В этом случае тахометр монтируется таким образом, чтобы ось BB1 его подвеса была совмещена с продольной осью Осхс самолета (рис. 19).
До тех пор пока самолет летит строго по заданному направлению, гироскоп гиротахометра вращается только вокруг своей главной оси
Гироскопические тахометры могут быть использованы для измерения угловых скоростей поворота самолета не только относительно его вертикальной оси, но и относительно его продольной и поперечной осей (рис.14). Для этого необходимо так установить гироскопический тахометр, чтобы его ось ОСх была совмещена при нулевом положении гироскопа (рис.18) с соответствующей осью Осус или Осл: с самолета.
7.3. Гироскопический указатель поворотовИз рассмотренного выше можно сделать заключение о том, что для выдерживания полета самолета в заданном направлении не обязательно определять величину угловой скорости его поворота вокруг оси Oczc. Важно лишь получить указание о возникновении этой скорости и ее направлении. Вот почему в авиации гироскопическим тахометром часто пользуются не для количественного измерения угловых скоростей поворота самолета, а лишь для получения качественной информации о факте ее возникновения.
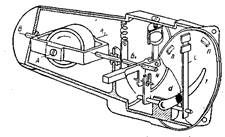
Рис. 20. Схема указателя поворотов
Конструкция гироскопического прибора в этом случае остается принципиально такой же, как и описанная выше. Однако прибор не имеет шкалы с делениями, которая заменена здесь диском с тремя марками (рис. 20); одной центральной, не имеющей обозначений, и двумя крайними: правой П и левой Л.
Одновременно прибор снабжен маятниковым креномером, выполненным в виде изогнутой по некоторому радиусу стеклянной трубки Т, внутри которой свободно перемещается шарик d.
Пользуясь гироскопическим указателем поворотов, летчики контролируют правильность выполнения виражей при разворотах самолета вокруг вертикали.
Учитывая, что при правильном вираже шарик, как и обычный маятник, должен устанавливаться по направлению равнодействующей двух сил: силы тяжести и центробежной силы инерции, - летчик, совершая разворот, может следить не только за положением стрелки гиротахометра, но и за положением шарика креномера. Вот почему указатель поворотов и завоевал одно из основных мест среди авиационных навигационных приборов.
Чтобы читатель мог составить себе представление о конструктивном выполнении авиационных гироскопических указателей поворотов, на рис.21 показана одна из современных моделей прибора с питанием от постоянного электрического тока напряжением 27 в.
7.4. Авиационный гироскоп направленияНесмотря на то, что гироскопический указатель поворотов позволяет выдерживать прямолинейный полет и совершать правильные развороты самолета, пользование одним этим прибором при выполнении слепого полета крайне затруднительно.
В самом деле, представим себе, что самолету было задано направление полета АВ (рис.21), по которому и совершалось его перемещение, начиная от пункта А. В силу тех или иных возмущений самолет в точке С начал отклоняться от заданного курса АВ, поворачиваясь вокруг вертикальной оси в направлении против часовой стрелки.

Рис.21. Общий вид авиационного указателя поворотов при снятой крышке
При наличии на самолете гироскопического указателя поворотов описываемый поворот будет сразу же зафиксирован прибором, стрелка которого отклонится от нулевой черты на шкале указателя. Однако летчик в момент нахождения самолета в точке С мог быть занят наблюдением показаний какого-либо другого контрольного прибора, число которых на приборной доске современного самолета достаточно велико. Может случиться так, что летчик обратит внимание на шкалу гироскопического указателя поворотов лишь только в точке D, когда самолет уже отклонится от заданного курса на некоторый угол Δα.
Как только пилот заметит по указателю поворотов вращение самолета, он сразу же прекратит это вращение и вновь будет выдерживать самолет в прямолинейном полете. Но теперь это движение уже не совпадет с заданным курсом А В, а произойдет в некотором новом направлении DE, составляющем с заданным курсом АВ угол Δα. По шкале указателя поворотов летчик не сможет определить величину угла Δα и, следовательно, не сможет устранить накопившуюся ошибку.
Вот почему выдерживание прямолинейного полета самолета по показаниям лишь одного гироскопического указателя поворотов требует непрерывного наблюдения за его стрелкой, что утомляет пилота. Для осуществления слепого полета необходимо иметь еще один прибор, который позволял бы летчику оценивать направление полета самолета по отношению к заданному курсу не в результате непрерывного наблюдения за показаниями прибора, а лишь по кратковременным взглядам на шкалу последнего. Именно таким прибором и является авиационный гироскоп направления.
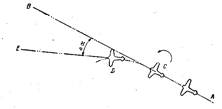
Рис.22. Схема, объясняющая необходимость наличия на самолете гироскопа направления
Сущность устройства гироскопа направления может быть пояснена схемой (рис.23). Представим себе гироскоп с тремя степенями свободы, корпус которого жестко укреплен на самолете так, что его наружная ось СС1 подвеса перпендикулярна плоскости xcOQycкрыльев. В процессе горизонтального полета самолета наружная ось СС1 подвеса такого гироскопа будет совмещена с вертикалью 22. Если ротору гироскопа сообщить теперь вращение вокруг главной оси AA1 с достаточно большой угловой скоростью, то гироскоп, как известно, будет сохранять свою главную ось ААХ неподвижной в пространстве. Поэтому направление полета самолета можно оценивать величиной угла ак, называемого обычно углом компасного курса, образуемого продольной осью 0с; ес самолета с плоскостью АОС гироскопа.
Для удобства замера угла ак наружное кольцо НК гироскопа снабжают диском D с нанесенной на нем шкалой, разделенной по окружности на 360°, - а корпус прибора индексом L, остающимся неподвижным относительно самолета.
Нулевую черту, соединяющую деления 0 и 180° шкалы диска или так называемой картушки D, совмещают с плоскостью АОС гироскопа, в которой всегда находится его главная ось АА1. Поэтому в тех случаях, когда величина угла φ отклонения главной оси АА1 гироскопа от плоскости NOZ меридиана известна, посредством гироскопа может быть измерен и истинный курсовой угол а полета самолета, равный сумме двух углов.
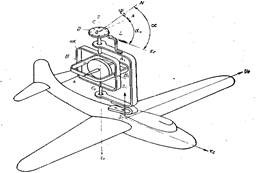
Рис.23. Принципиальная схема гироскопа направления
Однако пользоваться подобным способом измерения истинного курсового угла α в течение более или менее продолжительного времени практически невозможно.
Свободный гироскоп, сохраняя свою главную ось неподвижной в пространстве, непрерывно отклоняется как от плоскости горизонта, так и от плоскости меридиана.
Это движение имеет место и в рассматриваемом случае, в результате чего главная ось АА1 будет непрерывно изменять свое положение по отношению к плоскости NOZ меридиана, вызывая тем самым и непрерывное изменение угла φ. Именно эта причина усложняет использование гироскопа с тремя степенями свободы для измерения истинного курсового угла а полета самолета.
Чтобы вызвать прецессионное движение гироскопа вокруг вертикали ZZ, (рис.80), необходимо создать внешний момент М, действующий на гироскоп относительно его внутренней оси подвеса ВВХ.
В большинстве своем авиационные гироскопы направления снабжаются еще так называемой задающей шкалой, пользуясь которой пилот устанавливает для памяти необходимый курсовой угол полета. Эта вторая задающая шкала ничем не связана с гироскопом. Она соединена лишь с корпусом прибора, относительно которого ее положение может устанавливаться произвольно поворотом одной из рукояток, размещенных на лицевой стороне прибора. В некоторых моделях авиационные гироскопы направления снабжаются дополнительно и маятниковым креномером, ясно видным на рис.25.
Наличие гироскопа направления избавляет летчика от необходимости непрерывно следить за стрелкой гироскопического указателя поворотов.
Однако силы трения, неизбежно существующие в опорах подвеса, неточности балансировки, люфты в подшипниках и целый ряд других причин, связанных с ошибками при изготовлении и регулировке прибора, обусловливают возникновение вредных моментов. Указанные моменты, носящие название возмущающих, действуя на гироскоп относительно его осей подвеса, и вызывают отклонение гироскопа направления от первоначально заданного положения. Существенным недостатком прибора является также то, что при отклонении в силу тех или иных возмущающих моментов главной оси AA1 гироскопа от плоскости меридиана NOZ прибор не возвратится в прежнее положение (даже после прекращения действия возмущающих моментов). Так как воздействие возмущающих моментов происходит непрерывно, отклонение простейших гироскопов направления от заданного положения совершается довольно быстро, примерно 5° за 15 мин. Поэтому гироскопом направления можно пользоваться в течение лишь непродолжительного времени: при виражах самолета, при преодолении облаков, туманностей, грозовых туч и т.п. В дальнейшем его показания должны быть исправлены по магнитному компасу.
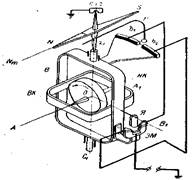
Рис.26. Принципиальная схема устройства гиромагнитного компаса
Необходимость частой проверки показаний гироскопа направления заставляла приборостроителей усиленно искать путей, обеспечивающих неизменное сохранение главной оси гироскопа в плоскости меридиана. Решение этой задачи впервые в мире было найдено советскими конструкторами, создавшими принципиально новый гироскопический прибор, получивший название гиромагнитного компаса.
7.5. Авиационный гиромагнитный компас
Чтобы разобраться в принципе действия гиромагнитного компаса, представим себе гироскоп, на продолжении наружной оси СС1 подвеса которого (рис.26) расположена независимо подвешенная стрелка NS магнитного компаса, несущая на себе контактный движок r. На наружном кольце НК гироскопа смонтированы две изолированные контактные ламели b1 и b2. При отклонении главной оси АА1 от плоскости Nm0Z магнитного меридиана, с которой совмещена стрелка NS магнитного компаса, движок г придет в соприкосновение с одной из ламелей b1 и b2. В результате через одну из двух обмоток электромагнита ЭМ, неподвижно укрепленного на наружном кольце НК, пойдет электрический ток.
При включении в цепь электрического тока обмотки электромагнита ЭМ возникнет магнитный поток, который, воздействуя на якорек Я, укрепленный на оси внутреннего кольца ВК, создаст момент, стремящийся повернуть гироскоп вокруг оси BB1. Но, как известно, при воздействии на быстро вращающийся вокруг оси АА1 гироскоп моментом относительно одной из осей его подвеса возникает прецессионное движение вокруг второй оси. В данном случае прецессионное движение будет происходить вокруг оси СС1 до тех пор, пока главная ось ЛЛХ вновь не совместится с плоскостью Nm0Z магнитного меридиана.
В этот момент движок r выйдет из соприкосновения с контактной ламелью и прекратит питание электромагнита ЭМ, а следовательно, и воздействие на гироскоп внешнего момента. Такова в кратких чертах принципиальная сущность работы гиромагнитного компаса.
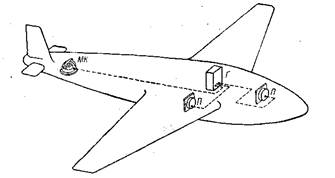
Рис. 27. Схема размещения на самолете агрегатов дистанционного гиромагнитного компаса
С целью устранения возможных недостатков магнитную стрелку на современных самолетах стремятся устанавливать на возможно более удаленном расстоянии от двигателей и кабины летчика (в концах крыльев и хвостовой части фюзеляжа).
Преимуществом прибора, получившего название дистанционного гиромагнитного компаса, является то, что на магнитную стрелку, смонтированную в хвостовой части фюзеляжа, действуют значительно меньшие возмущающие моменты, чем на размещенную непосредственно в корпусе гироскопической системы.
Поэтому вождение самолета по заданному курсу с помощью дистанционного гиромагнитного компаса будет осуществляться с большей точностью, чем при пользовании гиромагнитным компасом, стрелка которого смонтирована в непосредственной близости от гироскопа в одном общем корпусе.
Для передачи показаний гироскопа в кабину штурмана, а в некоторых случаях и на приборную доску летчика дистанционный гиромагнитный компас снабжается специальными повторителями П, аналогичными повторителям, применяемым в морском флоте.
Дистанционные гиромагнитные компасы, питаемые электрическим током, получили широкое распространение не только в авиации. Малые габариты, простота обслуживания и надежность в работе обеспечили его применение и на судах малого тоннажа.

Рис.28. Комплект дистанционного гиромагнитного компаса: 1 - гироскопический узел; 2 - магнитный компас; 3 - повторитель штурмана; 4 - повторитель летчика
На рис.29 показан комплект дистанционного гиромагнитного компаса, состоящего из гироскопа, магнитной системы и двух повторителей: для штурмана и для пилота.
7.6. Авиационный гироскопический горизонтТак как самолет в воздухе может занимать любое положение по отношению к плоскостям горизонта и меридиана, то для выдерживания полета по заранее намеченному направлению необходимо сохранять не только его курс, но и горизонтальное положение. С этой целью современные самолеты оборудуются специальными гироскопическими приборами, главная ось которых сохраняет вертикальное направление. Однако установка главной оси гироскопа с тремя степенями свободы в начальный момент времени в вертикальном направлении еще не обеспечивает выдерживание горизонтального полета самолета.

Рис. 30. Схема прямолинейного полета в мировом пространстве и у земной поверхности
Действительно, если бы мы совершали полет по показаниям гироскопа, главная ось которого в момент старта была совмещена с радиусом Земли (рис.30), то наше движение было бы прямолинейным, но только по отношению к неподвижным звездам, а не к земной поверхности. На практике важно именно последнее, поэтому под прямолинейным горизонтальным полетом принято понимать перемещение самолета на постоянной высоте над земной поверхностью, т.е. по дуге окружности постоянного радиуса, равного сумме земного радиуса R и высоте полета h.
Таким образом, главная ось гироскопа, предназначенного для выдерживания полета в горизонтальном положении, должна быть неизменно совмещена с направлением истинной вертикали 03Z. Это условие может быть выполнено лишь при наличии в системе гироскопического прибора таких сил, которые создавали бы моменты, удерживающие главную ось гироскопа в совмещении с истинной вертикалью.
В авиационном гироскопическом горизонте, применявшемся на самолетах в 1914-1916 гг. в качестве такой удерживающей силы использовалась сила веса его ротора. Для уяснения принципа работы прибора обратимся к схеме рис.31. На ней, в отличие от действительной конструкции, ротор прибора изображен не опирающимся на острие, а подвешенным на штанге Ш, оканчивающейся шаровой опорой. Такое изменение схемы ни в коей мере не искажает принципа работы рассматриваемого прибора и сделано лишь с целью обеспечения большей наглядности при объяснении существа работы рассматриваемого гироскопического прибора.
Центр тяжести ротора смещен вниз по отношению к точке его подвеса. На схеме это смещение условно показано в виде шарового груза, центр которого смещен относительно точки подвеса вдоль главной оси АА1 гироскопа на расстояние. Условимся считать, что с центром шарового груза совмещен центр тяжести ротора гироскопического горизонта.
До тех пор пока главная ось АА1 будет сохранять вертикальное положение, сила G его веса проходит через точку подвеса гироскопа и поэтому никаких моментов относительно точки подвеса О, на него воздействующих, не создает. Вектор кинетического момента гироскопа JΩ, совмещенный с главной осью АА1 будет направлен по вертикали OZ. В результате по положению главной оси можно судить о направлении истинной вертикали.
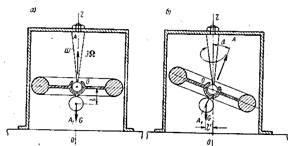
Рис.31. Принципиальная схема устройства маятниковой гировертикали
Если же главная ось AA1 начнет отклоняться от вертикали OZ, то даже при незначительном угле наклона сила G начнет создавать относительно точки подвеса момент G, который будет тем больше, чем больше величина l’, являющаяся проекцией смещения l на горизонтальную плоскость. В рассматриваемом случае вектор момента Gl’ перпендикулярен плоскости чертежа и направлен из точки подвеса ротора в сторону читателя.
Под влиянием внешнего момента Gl’ гироскоп, как известно, начнет прецессионное движение, причем так, чтобы по кратчайшему направлению привести свою главную ось АА1 к совмещению с вектором внешнего момента Gl’. Таким образом, главная ось АА1 и совмещенный с нею вектор кинетического момента JΩ начнут выходить из плоскости чертежа, двигаясь своим верхним концом в направлении на читателя.
Так как точка подвеса гироскопа остается неподвижной, то в результате рассматриваемого движения нижний конец главной оси, а следовательно, и шаровой груз будут отклоняться за плоскость чертежа. Таким образом, как только под влиянием момента Gl’ начнется прецессионное движение гироскопа, вместе с последним поворачивается около точки подвеса и вектор момента Gl’.
Сказанное легко проследить, пользуясь схемой, приведенной на рис.32.
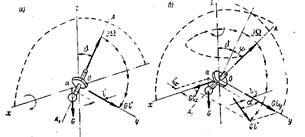
Рис.32. Схема, объясняющая работу маятниковой гировертикали
Сила G создаст относительно оси оу момент Gl’, благодаря чему главная ось АА1 гироскопа, а с ней вместе и вектор кинетического момента JΩ начнут двигаться к совмещению с вектором момента Gl’. Но как только гироскоп повернется вокруг оси ох и его главная ось АА1 составит с плоскостью xoz хотя бы незначительный угол φ (рис.32, б), так сразу же точка а пересечения направления действия силы G с плоскостью хоу сместится с оси ох. Теперь она будет отстоять от оси ох на расстоянии 1x и от оси оу на расстоянии 1у. В связи с этим сила G веса гироскопа создаст моменты Gly и Glxотносительно осей оу и ох.
Вектор суммарного момента Gl’ теперь уже не будет совмещен с осью оу и составит с ней некоторый угол а. Главная ось АА1 гироскопа, непрерывно движущаяся к совмещению с вектором момента Gl’ пойдет теперь к совмещению не с осью or/, а с направлением вектора суммарного момента Gl’. Так как вместе с поворотом гироскопа будет вращаться вокруг оси oz и вектор момента Gl', все на больший угол а, удаляющийся от плоскости yoz, то и главная ось гироскопа, стремящаяся к совмещению с вектором Gl', будет непрерывно перемещаться вокруг оси oz, совершая около нее конусообразные движения. При этом угол рассогласования между осями АА1 и oz обычно настолько мал, что практически главную ось АА1 гироскопа можно считать совмещенной с истинной вертикалью oz.
Однако маятниковая гироскопическая вертикаль не получила распространения в авиации из-за больших ее размеров. Дело в том, что для непрерывного выдерживания главной оси маятниковой гировертикали в непосредственной близости от направления истинной вертикали необходим значительный по величине момент, создаваемый силой веса гироскопа.
С этой целью для обеспечения требуемой точности прибора приходится утяжелять ротор, что влечет за собой и увеличение общих размеров прибора. При малых же размерах ротора и малом его весе момент, возникающий при отклонении гироскопа от истинной вертикали, оказывается недостаточным для противодействия возмущения, порождающим ошибки маятниковой гироскопической вертикали.
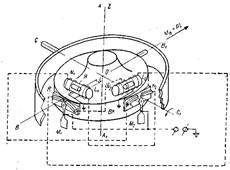
Рис. 33. Принципиальная схема устройства гирогоризонта
По этим причинам маятниковая гировертикаль не могла быть использована в авиации, найдя себе применение только в морском флоте. В авиации для сохранения вертикального положения главной оси небольшого по размерам гироскопа применяются различные методы. На рис.33 приведена схема гироскопа с тремя степенями свободы, центр тяжести которого совмещен с точкой подвеса, а его главная ось ЛЛ, расположена вертикально. На гироскопической камере ВК, которая, как известно, выполняет роль внутреннего кольца подвеса, установлено два цилиндра из немагнитного материала. Эти цилиндры расположены взаимно-перпендикулярно, причем каждый из них установлен симметрично по отношению к соответствующим осям ВВ1 и CC1 подвеса гироскопа.
С обоих концов цилиндров располагаются катушки соленоидов N1, L1 и N2; L2, включаемые в сеть электрического тока посредством маятникового М, и М2, оси подвесов которых параллельны осям ВВ1 и CC1 гирокамеры. Предположим, что отклонение главной оси ЛЛ) гироскопа от направления истинной вертикали OZ произошло в результате поворота гироскопа вокруг оси CC1 в направлении, показанном стрелкой. При этом маятник М2, сохраняя отвесное положение, замкнет ламель K2, расположенную совместно со второй ламелью К1 на изолированном основании, укрепленном на корпусе гирокамеры.
Замыкая контактную ламель К2, маятник М2 включит ток в катушку L1 соленоида, расположенного перпендикулярно оси СС1. Воздействие электромагнитного поля соленоида на помещенный внутри цилиндра якорек Я вызовет перемещение последнего вдоль оси СС1 вправо. Вес Р якорька Я создаст на плече момент Мв = Рl, направление которого на схеме показано вектором, совпадающим с осью ВВ1.
Момент Рl вызовет прецессионное движение гироскопа вокруг оси СС1 в результате чего его главная ось AAl будет идти на совмещение с истинной вертикалью 0Z. Как видим, направление перемещения якорьков зависит от того, какую ламель замкнут соответствующие маятники М1 или М2, которые и управляют системой удерживания гироскопа в вертикальном положении, получившей название корректирующего устройства.
Корректирующие устройства гироскопических приборов выполняются в самых различных вариантах, с которыми читатель может познакомиться в литературе, указанной в конце книги.
Однако вне зависимости от их конструктивной разновидности принципиальная сущность корректирующих устройств остается одной и той же.
Маятники той или иной конструкции фиксируют отклонение главной оси гироскопа от направления истинной вертикали и включают в работу устройства, создающие внешние, воздействующие на гироскоп, моменты. Под воздействием этих моментов гироскоп получает прецессионное движение, в результате которого его главная ось и приходит к совмещению с истинной вертикалью.
Гироскопические приборы, оборудованные корректирующими устройствами для выдерживания их главной оси в вертикальном направлении, в отличие от маятниковых гироскопических вертикалей, получили название авиационных гироскопических горизонтов, пользуясь которыми летчики во время полета получают возможность фиксировать величины углов как продольного, так и поперечного крена самолета.
Часто в целях экономии места на приборной доске самолета, которая занята большим количеством приборов, авиационные гироскопические горизонты монтируют в одном корпусе с гироскопическим указателем поворотов. Такой комбинированный прибор (рис.34) совмещает гироскопический горизонт ГГ, гироскопический указатель поворотов УП и маятниковый креномер МК.
Рис.34. Комбинированный гирогоризонт
Для большей наглядности приведена фотография одновременно трех экземпляров одного и того же гироскопического комбинированного прибора. Каждый экземпляр с предварительно снятой защитной крышкой установлен под различным углом зрения к объективу, благодаря чему читатель может составить представление и о компановке прибора, и о его наружном виде со стороны шкалы.
7.7. Автоматический штурманВ связи с непрерывным ростом скорости и дальности беспосадочных полетов усложнилась работа по определению местоположения летящего самолета, который на протяжении большого участка пути совершает движение в условиях отсутствия видимости земных ориентиров. Возникла необходимость в приборе, автоматически вычисляющим пройденный самолетом путь.
Наличие гироскопа позволило создать такой прибор. Он был назван автоматическим штурманом, который непрерывно записывал пройденный самолетом путь (подобно автоматическому курсографу, регистрирующему направления движения корабля). Прообразом современных автоматических приборов, непрерывно регистрирующих на бумажной ленте курс корабля, самолета или любой другой подвижной платформы явился самопишущий магнитный компас, разработанный М.В. Ломоносовым еще в 1759 г. Отечественный навигационный полуавтомат курсограф был разработан В.Ю. Поляком в 1929 г. Позже решению этой задачи посвятили свой труд Н.А. Гриценко, В.А. Шефов, С.А. Кондратюк и многие другие советские специалисты.
В общих чертах сущность устройства автоматического штурмана может быть рассмотрена по схеме (рис.35). На планшете П закреплена карта с предстоящим маршрутом перелета. Над картой располагаются две взаимно-перпендикулярные кулисы Км и Кш, в прорезях которых установлен соединяющий их между собой ползунок Р, несущий карандаш, соприкасающийся острием с плоскостью карты.
Каждая кулиса заканчивается гайкой, связывающей их с ходовыми винтами ХВШ или ХВМ, приводимыми во вращение электродвигателями. С помощью электродвигателя ЭДМ вращают ходовой винт ХВМ, перемещающий кулису Км.
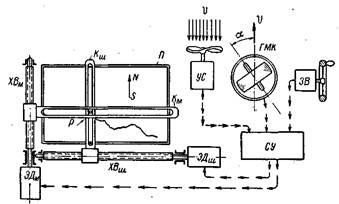
Рис.35. Принципиальная схема устройства автоштурмана
В результате ползунок Р приходит в движение вдоль меридиана карты, и карандаш начинает чертить след перемещения ползунка. Если ток подать на второй электродвигатель ЭДШ, карандаш начнет чертить линию перемещения ползунка вдоль параллели карты.
Для вычерчивания на карте линии проходимого самолетом пути необходимо перемещение ползунка производить со скоростью, пропорциональной скорости самолета. С этой целью в системе автоштурмана используется указатель скорости УС, показания которого передаются в счетно-решающее устройство СУ, автоматически подбирающее необходимое напряжение, подаваемое на электродвигатели ЭДМ и ЭДШ.
Однако показаний одного указателя скорости самолета еще недостаточно для работы автоматического штурмана. Дело в том, что в общем случае направление воздушной скорости v самолета может занимать любое положение по отношению к плоскости меридиана MS (рис.36, а). Поэтому для правильной записи на карте проходимого самолетом пути его воздушную скорость v раскладывают на две составляющие: uм - вдоль меридиана и uш - вдоль параллели.
Так как величины uм и uш зависят от курсового угла а, по которому самолет движется по отношению к плоскости меридиана, то для автоматического их определения в счетно-решающее устройство СУ автоштурмана непрерывно подаются показания гиромагнитного компаса ГМК.
В счетно-решающем устройстве, куда непрерывно подаются значения величин воздушной скорости u самолета и курсового угла а, происходит разделение скорости v на составляющие uм и uш
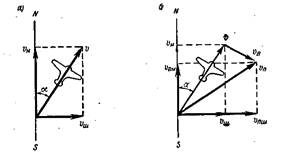
Рис.36. Схема, показывающая снос самолета с заданного курса под воздействием сил ветра
На величину скорости движения самолета относительно земной поверхности большое влияние оказывают ветры. Если скорость ветра, совпадает с воздушной скоростью самолета, то его суммарная (путевая) скорость относительно земной поверхности увеличивается. Когда воздушная скорость самолета и скорость ветра противоположны, путевая соответственно уменьшается. В общем случае скорость ветра vB порождает боковой снос самолета, вызывая его отклонение от заданного направления полета. В итоге путевая скорость vn самолета будет определяться геометрической суммой двух скоростей: воздушной скорости v самолета и скорости ветра uв (рис.36, б).
Проекции путевой скорости v" на направления вдоль меридиана un, м и вдоль параллели un, ш будут уже отличны от. проекций uм и uш на те же направления воздушной скорости v. При большом протяжении маршрута, так же как и при больших скоростях ветра ошибки записи пройденного пути вследствие сноса самолета могут достигать значительных размеров. Поэтому в автоштурманах предусматривается специальное устройство, так называемый задатчик скорости и направления ветра ЗВ, пользуясь которым штурман вручную вводит соответствующую поправку. Эта поправка суммируется в счетно-решающем устройстве СУ с показаниями указателя воздушной скорости УС и гиромагнитного компаса ГМК. В результате из счетно-решающего устройства на электродвигатели ЭДМ и ЭДШ подается напряжение, обеспечивающее перемещение кулис Ки и Кш строго в соответствии с путевыми скоростями самолета: упм - вдоль меридиана и vnш - вдоль параллели (рис.36, б).

Рис.37. Внешний вид планшета автоштурмана
Таков в самых кратких чертах принцип работы авиационного автоматического штурмана, внешний вид планшета которого показан на рис.37.
Похожие работы
... для устройств автоматического управления. В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии. Основные области применения гироскопов – судоходство, авиация и космонавтика. Рассмотрим инерциальную навигацию подробно - метод измерения ускорения судна или летательного аппарата и определения его скорости, положения и расстояния, ...
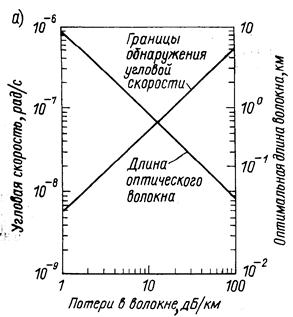
... оптического волокна с потерями a существует определенная длина, позволяющая оптимизировать пределы обнаружения при дробовом шуме: (8) Рис.5, а. Чувствительность волоконно-оптического гироскопа при дробовом шуме светоприемника при оптимальной длине волокна Рис.5, б. Чувствительность волоконно-оптического гироскопа при дробовом ...

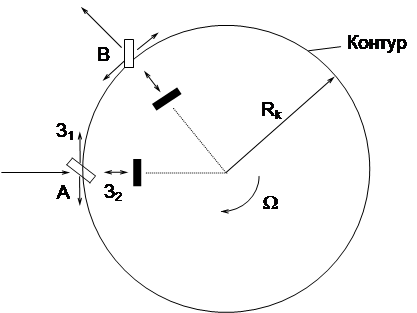

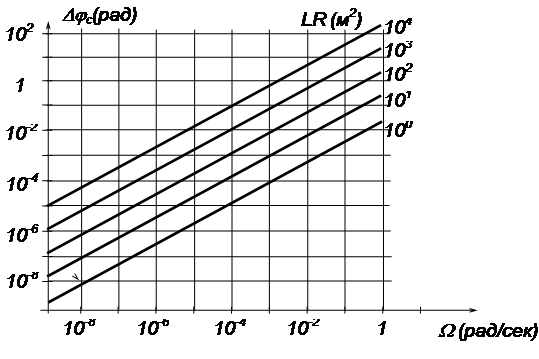

... калькуляции представлены в табл.4.2. Ленточный график работ 5. Безопасность жизнедеятельности и охрана труда Дипломная работа посвящена анализу погрешностей волоконно-оптического гироскопа. В ходе ее выполнения были проведены необходимые расчеты и сделаны выводы, которые могут послужить материалом для ...
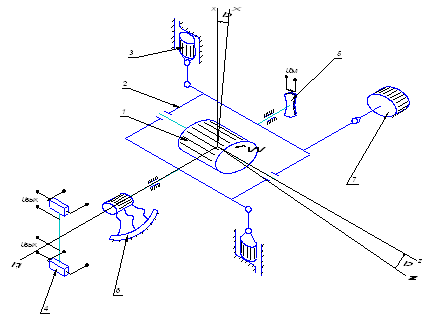
... в виде системы с обратной связью, состоящей из датчика угла, усилителя, дифференцирующего звена, датчика момента (рис.1). Рис.1. Принципиальная кинематическая схема интегрирующего гироскопа. 1 - гиромотор; 2 - рама; 3 - пневматический демпфер; 4 - потенциометрический датчик угла; 5 - датчик момента; 6 - токоподводящее устройство; 7 - арретирующий электромагнит. Наибольшее ...
0 комментариев