Навигация
1.3 Техническая кибернетика
ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА — направление (раздел) кибернетики, в котором на основе единых для кибернетики в целом научных идей и методом изучаются технические системы управления. Техническая кибернетика – современный этап развития теории и практики автоматического регулирования и управления, а также научная база для решения задач комплексной автоматизации производства, транспортных и др. сложных систем управления. Сложные системы управления, в которых как непременный элемент принимает участие человек-оператор, называются автоматизированными системами, в отличие от систем автоматических, функционирующих без непосредственного участия в них человека. Проблема "человек — машина", в которой рассматриваются возможности рационального распределения функций между человеком и автоматически действующими устройствами,— одна из главных в технической кибернетике. Участие человека в управлении агрегатами и технологическими процессами, с одной стороны, и в административном управлении, с другой, также приводит к сращиванию этих двух сфер управленческой деятельности и к созданию единой человеко-машинной системы управления. Поэтому, кроме физиологических особенностей человека-оператора, существенное значение приобретает и его психологическое состояние. Главной задачей инженерной психологии является разработка методов использования знаний о поведении человека при проектировании и эксплуатации сложных человеко-машинных систем управления.
Большое значение в технической кибернетике приобретают методы решения задач, позволяющие преодолеть трудности, возникающие из-за наличия значительного числа взаимодействующих элементов (подсистем), входящих в соответствующую сложную систему.
Одним из самостоятельных направлений технической кибернетики является распознавание образов. Распознающие системы имеют большое научное и практическое значение, их применяют не только при создании читающих автоматов, но и при распознавании и анализе ситуаций, характеризующих состояние технологических процессов или физических экспериментов, а также при разработке медицинских автоматизированных диагностических устройств и т. д. Одним из самостоятельных направлений технической кибернетики является направление, связанное с разработкой систем автоматизированного проектирования (САПР) разного рода объектов и систем.
2. Взаимодействие управляемой и управляющей систем
Управление — функция системы, ориентированная либо на сохранение ее основного качества (т. е. совокупности свойств, утеря которых влечет разрушение системы) в условиях изменения среды, либо на выполнение некоторой программы, долженствующей обеспечить устойчивость функционирования, гомеостаз, достижение определенной цели. Понятие управления формализовано настолько, чтобы можно было дать его точное и при этом достаточно широкое определение; более того, всякое описательное определение управления неизбежно оперирует понятиями, общепринятые формализации которых не выработаны (система, среда, цель, программа и др.). Приведенное определение предусматривает два случая; первый из них имеет место в самоорганизующихся системах — биологических, социальных и социально-экономических; второй случай характерен для отдельных подсистем самоорганизующихся систем, а также для разнообразных технических устройств. При этом цель, в зависимости от трактовки соответствующего понятия, можно соотносить отдельным частным случаям управления либо считать неотъемлемым атрибутом управления вообще.
Систему, в которой реализуются функции управления, обычно называют системой управления и выделяют в ней две подсистемы: управляющую и управляемую. Управляющая система осуществляет функции управления, управляемая система является его объектом. Если управление осуществляется сознательно, то управляющая система создается субъектом управления, который формирует также цель (цели) управления. Иногда понятия субъект и цель управления трактуются шире: субъект управления отождествляется с управляющей системой (независимо от ее природы), а в качестве цели принимается выполнение программы управления. Разделение системы управления на управляющую и управляемую подсистемы не всегда можно произвести однозначно. В технических системах возникающие при этом трудности не имеют принципиального характера, а касаются лишь удобства описания (например, при телеуправлении размещаемые на объекте управления устройства приема и передачи информации можно относить как к нему самому, так и к управляющей системе).
Между управляющей и управляемой системами необходимы каналы связи. По каналу связи, ведущему к управляющей системе от управляемой, передается информация о состоянии последней, точнее, о текущих значениях существенных переменных объекта управления; по каналу связи противоположного направления передается управляющая информация (управляющие воздействия). Таким образом, управляющая и управляемая системы соединены контуром обратной связи. В некоторых случаях канал связи для передачи информации о состоянии объекта управления отсутствует (имеется лишь прямая связь); такие схемы управления весьма ограничены по возможностям и отличаются низкой надежностью. Простейшая схема управления с обратной связью изображена на рис. 1, где R — управляющая система, О — управляемая система (объект управления), Е — среда системы управления, d — канал передачи информации о состоянии объекта управления, f — канал передачи управляющей информации, i — воздействия среды на объект управления, а — выход объекта управления. Эта схема, в частности, адекватно описывает многочисленные механизмы регулирования и технических и биологических системах по принципу гомеостаза.
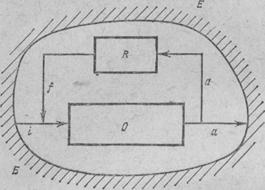
Рис. 1.
Состояние объекта управления в какой-либо момент времени здесь зависит от его предшествующих состояний, воздействий среды и управляющих воздействий, а состояние управляющей системы — от состояния объекта управления (и, возможно, ее собственных предшествующих состояний).
Механизмы регуляции по такой схеме в технических и биологических системах, как правило, действуют автоматически; при этом материальная субстанция, измерение которой дает информацию о состоянии объекта управления (давление пара, температура, электромагнитные характеристики и т. д.), используется в канале связи f как носитель этой информации. Для преобразования информации о состоянии в управляющую информацию управляющая система R соответственно изменяет величину сигнала, полученного по каналу f (см. Коэффициент обратной связи) или реализует трансформацию в качественно иной носитель (например, давление — в напряжение электрического тока). В данном частном случае — при автоматическом функционировании управляющей системы — ее обычно называют регулятором, хотя нередко эти два термина употребляются как синонимы.Важной отличительной особенностью сознательно управляемых социальных и экономических систем является обязательное наличие посредника в связях d и f, т. е. отсутствие автоматизма их функционирования. Это обусловливает многие специфические требования к организации систем социально-экономического управления, определению его качества, выдвигает проблему стимулирования.
Рисунка 1, однако, недостаточно для описания некоторых систем регулирования в технике, поведения высших животных, управляемого развитой высшей нервной деятельностью, и тем более для описания систем управления социальными и экономическими процессами.
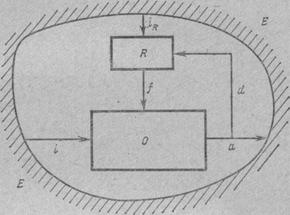
Рис. 2
В этих случаях управляющая система не только регистрирует состояние объекта управления, но и наблюдает за изменениями среды, прогнозируя возможные реакции объекта на эти изменения (т. е. осуществляет упреждающее определение его состояний, в данном случае — траекторий развития) с целью заблаговременного принятия соответствующих мер. Одна из возможных в подобных случаях схем информационных связей представлена на рис. 2.
В обеих приведенные схемах, а также других возможных вариантах информационного взаимодействия управляемой и управляющей систем последняя представляет собой орган переработки информации о состоянии объекта управления и среды функционирования системы управления в целом в управляющие воздействия. В различных частных случаях управляющие воздействия могут принимать самую разнообразную форму; при управлении экономикой их совокупность достаточно полно, хотя и не исчерпывающе охватывается понятием административно-хозяйственная структура.
Имеются различные принципы классификации как процессов переработки информации при управлении, так и вырабатываемых ими управляющих воздействий. В экономике наиболее существенно разделение управляющих воздействий на непосредственные и косвенные.
В административно-хозяйственной структуре непосредственное управляющее воздействие, будучи направлено на конкретный хозяйственный объект (любого уровня структуры до высшего включительно) или на любой объект из определенной совокупности, выражается в нормативном установлении показателя, фиксирующего значение какой-либо характеристики развития или функционирования данного объекта или границу изменения такой характеристики (например, рентабельности, прибыли, производительности труда, фонда заработной платы и т. д.); наиболее важные частные случаи — лимиты потребления ресурсов и задания по выпуску продукции для отдельных хозяйственных ячеек. Непосредственные управляющие воздействия, таким образом, представляют собой средства директивного влияния управляющей системы на объект управления, их назначение состоит в прямом ограничении множества его возможных состояний.
Косвенные управляющие воздействия основаны па использовании того обстоятельства, что ячейки социально-экономической системы представляют собой самоорганизующиеся системы, целенаправленно оптимизирующие свое развитие и функционирование в соответствии с собственными (имманентными) интересами. Эти интересы определяют отношение предпочтения каждой хозяйственной ячейки на множестве ее возможных состояний, однако данное отношение зависит от некоторой совокупности внешних параметров (прежде всего, ценностных показателей — цен, норм ренты, ставок различных отчислений и платежей и т. д.). Фиксация значений подобных параметров и составляет содержание косвенных управляющих воздействий; варьируя такие значения, управляющая система не меняет множества возможных состояний объекта управления, но ориентирует предпочтения на этом множестве в направлении, желательном с точки зрения цели управления, тем самым содействуя ее достижению.
При этом одно и то же управляющее воздействие может быть непосредственным по отношению к одним ячейкам социально-экономической системы и косвенным — по отношению к другим. Например, директивное установление в каждом экономическом районе объема деятельности отраслей, производящих услуги, распределяемые через общественные фонды потребления, является косвенным управляющим воздействием на процессы движения населения и трудящихся, т. е. на определенные ячейки социальной структуры общества. Область эффективности непосредственных воздействий сравнительно широка при управлении производственно-технологической структурой хозяйства и узка при управлении социальной структурой общества; относительно косвенных воздействий справедливо противоположное утверждение.
Совокупность управляющих воздействий, распределенных во времени, соответствующая какой-либо информации о состоянии объекта управления и среды (т. е. выход управляющей системы, обусловленный некоторыми значениями ее входов), называется управляющим решением. Всякое управляющее решение предполагает уменьшение разнообразия объекта управления (в случае использования косвенных воздействий — с учетом его самоорганизации). Закон необходимого разнообразия определяет требования к избирательной способности управляющей системы, обусловливаемые тем уменьшением разнообразия объекта управления, которое необходимо для эффективности управления.
Усиление избирательной способности управляющей системы (т. е. увеличение ее пропускной способности как канала связи, мощности по переработке информации или же собственного разнообразия) является центральной проблемой при разработке больших систем управления.
У. Р. Эшби наметил аналогию между усилителями мощности в технике и усилителями разнообразия управляющей системы: последняя должна пользоваться каким-либо интенсивным источником разнообразия, так направляя его функционирование, чтобы индуцировать проявления его избирательной способности, соответствующие цели управления. Таким источником разнообразия в социально-экономическом управлении является человек с его целенаправленной самоорганизующейся деятельностью, и проблема усиления избирательной способности управляющей системы в значительной мере сводится к проблеме человеческих факторов в управлении. Подобно техническим усилителям мощности усилители разнообразия могут быть многокаскадными: это достигается иерархической организацией управляющей системы. Кроме того, совершенствование структуры управляющей системы достигается реализацией принципа непрерывного (скользящего) управления.
Если все процедуры переработки информации о состояниях объекта управления и среды в управляющие решения могут быть формализовано описаны, такое описание называют алгоритмом управления. Современные требования к быстродействию, надежности, точности управления и информационная нагрузка на управляющую систему столь высоки, что могут быть удовлетворены лишь при широкой автоматизации процессов управления, для которой требуется формализация управленческих процедур. Однако полная формализация при управлении большими системами невозможна; это вызывает необходимость использования принципа внешнего дополнения.
Формализация процессов управления в социально-экономической системе опирается на использование математического моделирования, причем для прогноза состояний среды и объекта управления (в частности, принимаемых в результате тех или иных управляющих воздействий) применяются преимущественно дескриптивные, а для выработки управляющих решений — нормативные модели.
Литература
1. Винер Н. Кибернетика. Пер. с англ. М., "Советское радио", 1968.
2. Ланге О. Введение в экономическую кибернетику. Пер. с польск. М., "Советское радио", 1964.
3. Немчинов В. С. Избранные произведения. Т. 3. М., "Наука",- 1967.
4. Проблемы оптимального функционирования экономики. М., "Наука", 1972.
5. Эшби У. Р. Введение в кибернетику. Пер. с англ. М., Изд-во иностр. лит., 1959.
6. Эшби У. Р. Конструкция мозга. Пер. с англ. М., "Мир", 1964.
Похожие работы
... . В феврале 1964 г. журнал “Юнайтед Стэйтс Ньюс энд Уорлд Рипорт” публикует последнее его интервью “Машины изобретательнее людей?”. Смерть постигла основателя кибернетики 18 марта 1964 г., в возрасте 69 лет. 2. Кибернетика Норберта Винера Концепция кибернетики родилась из синтеза многих научных направлений. Во-первых - как общий подход к описанию и анализу действий живых организмов и ...
... для эффективной работы и научного поиска в этой области познания. Кибернетика как перспективная область научного познания привлекает к себе все большее внимание философов. Положения и выводы кибернетики включаются в их области знания, которые в значительной степени определяют развитие современной теории познания. Как справедливо отмечают отечественные исследователи, кибернетика, достижения ...
... , заменяя наводчика, и обращает внимание на роль обратных связей в технике и живых организмах. Очень продуктивным оказывается его знакомство с мексиканским физиологом доктором Артуром Розенблютом[2]. 2. Концепция кибернетики Роберта Винера В 1945 - 47 гг. Винер работал в кардиологическом институте в Мехико. В эти годы у Винера возникла идея о необходимости создания единой науки, изучающей ...
... (селективная концепция информации), и это позволяет подойти ко всем процессам с единой меркой, с единым статистическим аппаратом. Отсюда мысль об общей теории управления и связи - кибернетике. Количество информации - количество выбора - отождествляется Винером с отрицательной энтропией и становится, подобно количеству вещества или энергии, одной из фундаментальных характеристик явлений природы. ...
0 комментариев