Навигация
Общие сведения о многофункциональных РЛС
44911
знаков
0
таблиц
8
изображений
2. Общие сведения о многофункциональных РЛС
2.1 Назначение и задачи решаемые МРЛС
Радиотехнические системы (РТС) с телеуправлением и самонаведением обладают определенными преимуществами и недостатками. РТС с телеуправлением обеспечивают управление объектами на любой дальности, но с увеличением дальности увеличиваются ошибки наведения.
РТС с самонаведением обеспечивают хорошую точность на конечных участках наведения, но по дальности действия ограничиваются возможностями бортовых координаторов.
Сочетание преимуществ различных способов управления позволяет получить РТС с комбинированным управлением [2].
Комбинированным управлением называется комбинация нескольких
способов управления полетом управляемого объекта.
Комбинирование может быть последовательным, параллельным, смешанным.
Наиболее перспективным является - смешанное комбинирование, так как оно наиболее полно использует все достоинства каждого способа на всех участках полета. Ограничивает применение, сложность аппаратуры.
Все преимущества и достоинства комбинированного способа управления не могут быть полно реализованы при размещении элементов системы управления РТС на различных объектах. Необходимо преимущества и достоинства комбинированного способа управления подкрепить уменьшением времени реакции, повышением уровня автоматизации всех процессов обработки информации (как радиолокационной, так и командной) управления радиотехнической системы.
Одним из известных направлений решения данной проблемы – это применение многофункциональных РЛС (МРЛС).
МРЛС в процессе функционирования обеспечивает выполнение всех задач от момента обнаружения целей, до их уничтожения с заданной эффективностью, а именно:
поиск, обнаружение, опознавание и определение координат всех целей;
анализ воздушной обстановки, точное определение координат сопровождаемых целей.
Для этого необходимо:
1)увеличить дальность обнаружения целей, помехозащищённость от всех видов помех;
2)осуществить обнаружение, опознавание, сопровождение и определение координат нескольких целей одновременно;
3)обеспечить высокую степень автоматизации управления процессами боевой работы и малое время реакции, высокую надежность систем и их живучесть, высокую маневренность и мобильность.
Увеличение дальности обнаружения может быть достигнуто:
-увеличением средней мощности передатчика, путем повышения импульсной мощности, увеличения длительности импульсов, увеличения частоты следования импульсов, применения ЛЧМ;
-увеличением коэффициента усиления антенны;
-уменьшением потерь при квазиоптимальной обработке радиолокационных сигналов.
Одновременное обнаружение и сопровождение нескольких целей может достигаться за счет применения фазированных антенных решеток и СЦВМ в РЛС.
Высокая помехозащищенность МРЛС от активных помех достигается реализацией:
-метода компенсации активных помех;
-пространственной селекции по ширине ДН;
-временной и частотной селекции целей путем стробирования по дальности и узкополосной фильтрации на промежуточной частоте отраженных эхо-сигналов;
-нескольких типов сигналов;
-аппаратуры анализа помех, обеспечивающих включение необходимых мер защиты;
-цифровой обработки сигналов.
2.2 Обобщенная структурная схема МРЛС
Применительно к активному методу радиолокации, гибким методом обзора и рассмотренных принципов построения структурных схем СОЦ и ССЦ, структурная схема МРЛС может иметь вид представленный на Рис.8.
Передающая система формирует мощные высокочастотные сигналы и может быть построена по принципу автогенератора или усилителя мощности, возбуждаемого стабильными маломощными генераторами.
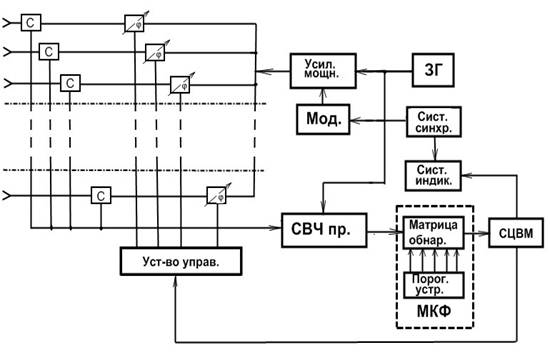
Рис 8. Структурная схема МРЛС.
Наилучшие характеристики имеют передающие системы, построенные по схеме усилительно-преобразовательной цепочки на усилительных (пролетных) клистронах, которые имеют хорошие коэффициенты усиления и полезного действия.
Применение антенной решетки является одним из необходимых условий при построении МРЛС. Основным достоинством ФАР является обеспечение поиска, обнаружения и сопровождения нескольких целей (и ракет), определение их координат с требуемой точностью.
Наличие ФАР ее тип, конструктивные особенности определяют необходимость и структурную схему системы управления лучом.
Одновременный поиск и сопровождение нескольких целей возможен при последовательном, параллельном и смешанном методах обзора пространства.
При последовательном обзоре однолучевая ДН последовательно просматривает все направления в пределах заданного сектора обзора. Параллельный и смешанный обзор вследствие необходимости формирования большого количества ДН применяются крайне редко.
Последовательный обзор может вестись:
- по жесткой программе;
- по гибкой программе.
Наиболее предпочтительной и удовлетворяющей требованиям: максимальной скорости обзора; определение точных координат сопровождаемых целей - является обзор по гибкой программе.
Приемная система обеспечивает селекцию, преобразование, усиление, детектирование и обнаружение сигналов на фоне помех.
Применение различных типов сигналов на этапах поиска, сопровождения предполагает наличие специальных каналов в приемнике обеспечивающих оптимальную (квазиоптимальную) обработку эхо сигналов.
Применение моноимпульсного метода пеленгации обуславливает применение трех приемных каналов: суммарного для обнаружения сигналов, сопровождения по дальности и скорости и двух разностных для сопровождения по угловым координатам. Сопровождение возможно и при реализации последовательного обзора по жесткой программе (сопровождение на проходе) но при этом точность определения угловых координат не выше ширины диаграммы направленности.
Выбор типа зондирующего сигнала, способов защиты от помех и обработки сигналов осуществляется на основе анализа помеховой обстановки.
Обеспечение малой времени реакции, сопровождение нескольких целей при одновременном ведении поиска невозможно без автоматизации не только процесса перехода на автосопровождение, но и самого процесса обнаружения. По этой причине без обнаружителя построенного по принципу многоканальной корреляционно-фильтровой схемы не обойтись. Сущность которой состоит в том, что на ее выходе формируется матрица обнаружения, состоящая из m*n элементов.
Каждый элемент матрицы характеризуется значением амплитуды сигнала, определенным временем запаздывания относительно зондирующих импульсов и определенным смещением по частоте относительно "нулевой" составляющей спектра зондирующего сигнала.
На этапе обнаружения производится сравнение амплитуды сигнала каждого элемента матрицы обнаружения со значением уровня порога. Выработка порога производится из условия стабилизации вероятности ложной тревоги на заранее определенном уровне(критерий НЕЙМОНА-ПИРСОНА). Для улучшения соотношения сигнал/помеха в обнаружителе может применяться некогерентное накопление путем суммирования амплитуд (в каждом элементе матрице) при многократном обращении к цели. С помощью матрицы обнаружения возможна реализация любого критерия обнаружения ( К из L ).
Система индикации МРЛС должна обеспечить одновременное наблюдение: сектора поиска, анализ воздушной и помеховой обстановки, выбор целей для дальнейшей обработки, анализ качества, характеристик сопровождаемых целей.
По этой причине система индикации включает: индикатор поиска, индикатор сопровождения и информационные табло. Сложность индикаторов определяется также необходимостью вывода на плоскость экрана три-четыре координаты цели (обычно 2 координаты).
На индикатор командира, как правило выводится вторичная информация по сопровождаемым целям.
Вычислительная система обеспечивает: управление системами станции, обработку радиолокационной информации, выдачу данных на систему индикации, обработку и выдачу данных для радиолинии, обработку данных контроля МРЛС. Вычислительная система строится по известным принципам построения цифровых вычислительных машин. Сопряжение СЦВМ с абонентами осуществляется устройством ввода-вывода.
Таким образом:
Возможности МРЛС по одновременному поиску, обнаружению и сопровождению нескольких целей, помехозащищенности, быстродействию позволяют реализовать в РТС:
-применение комбинированных способов управления и изменения их вида в зависимости от типа целей и помеховой обстановки;
-нескольких методов наведения и переход с одного метода на другой в процессе полета ракеты;
-высокую помехозащищенность за счет применения различных типов сигналов, наилучших при данном виде помех;
-высокую степень автоматизации управления всеми режимами работы и процессами;
-большую пропускную способность, малое время реакции за счет одновременного обнаружения и сопровождения целей;
-оценку боеготовности за счет применения ЦВМ
Заключение
История развития средств радиолокации представляет собой комплекс мероприятий направленный, прежде всего на повышение вероятности обнаружения, точности и дальности сопровождения, помехозащищенности, удобства управления и ряда других показателей, влияющих на качество и характер технических, маневренных и боевых характеристик. Причем изменение идет сразу по нескольким параметрам сразу, что позволяет сделать новый шаг позволяющий подняться на новый уровень.
Существующая борьба между средствами обнаружения и системами защиты стимулирует принятие не стандартных решений.
В последнее время появилась тенденция в получении возможности управления и получения технической информации от различных РЛС, разного «парка», времени выпуска, на единый центр управления.
Рассмотренная РЛС 9S35М1, объединившая в себе два принципиально различных по своим физическим свойствам приемника, использующая два различных передатчика для решения индивидуальных задач, удобная в управлении, позволяющая оператору легко использовать все положительные стороны РЛС при ведении поиска и сопровождения целей [6].
Рассмотренная в качестве примера проблема повышения разрешающей способности по дальности, наглядно показывает возможности использования для этого дисперсионных ультразвуковых линий задержки.
Тем не менее РЛС уже дважды проходила модернизацию [7], но так и не стала многофункциональной РЛС. И только последние разработки по модернизации РЛС с установкой фазированной антенной решеткой, заменой ЭВМ и системы управления лучом, позволили ей стать МРЛС [9].
Список литературы
1. П.Л. Багинский, Ю.А. Литвиненко Устройство и эксплуатация ЗРК: Учебное пособие. Часть 2. РЛС 9С35М1. Оренбург, 1994г.
2. А.К. Востриков, С.М. Долотов, В.Г. Красюк, А.У. Митин Основы построения радиотехнических систем управления: Учебное пособие. Киев 1981г.
3. Я.Д. Ширман Теоретические основы радиолокации. М., Сов.радио, 1970г. - 560стр.
4. Л.С. Гуткин, В.Б. Пестряков, В.Н.Теплугин. Радиоуправление. 1970
5. Физические основы получения информации : учебное пособие/ И.Г. Перминов . – Пермь: Изд-во Перм. Гос. Техн. Ун-та, 2006.
Дополнительные источники
6. http://pvo.guns.ru/buk/buk_3.htm ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС 9К37М1-2 "БУК-М1-2" (SA-11 Gadfly) (БУК-М)
7. http://www.artillerist.ru/modules/myarticles/article.php?storyid=57 Самоходный зенитный ракетный комплекс 9К37 «Бук» (история ТТХ)
8. http://www.cardarmy.ru/fotos/buk.htm Армейский самоходный зенитно-ракетный комплекс "Бук" (состав ТТХ)
9. http://www.rusarmy.com/pvo/pvo_vsk/zrk_buk.html Зенитный ракетный комплекс "Бук" (модернизация)
0 комментариев