Лабораторная работа
«Исследование динамических свойств моделей типовых звеньев систем автоматического управления по их частотным характеристикам»
Введение
Цель работы – изучение экспериментального метода и аппаратных средств определения амплитудно-фазовых частотных и динамических характеристик типовых звеньев.
1. Теоретические сведения
Для сложного объекта автоматического регулирования не всегда удается произвести исследование с помощью аналитических методов ввиду того, что заранее неизвестны математические модели, параметры объекта или существуют значительные нелинейности в объекте. В этом случае применим экспериментальный метод построения частотных характеристик исследуемого объекта, базирующийся на том, что если на его вход подать сигнал синусоидальной формы с частотой и амплитудой, равной единице, то на выходе в установившемся режиме получится тоже синусоидальный сигнал с той же частотой но с другими амплитудой и фазой.
Синусоидальные функции могут выражаться в векторной форме показательными функциями с мнимым аргументом:
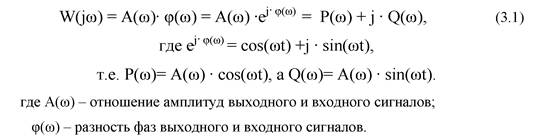
Величина W(j) называется комплексным коэффициентом передачи или усиления, представляющим комплексное число, модуль которого равен отношению амплитуд выходного и входного сигналов при неизменной частоте входного сигнала. Если положить =0, то получается коэффициент усиления или коэффициент передачи системы или звена.
Процесс регулирования Y(t) складывается из двух частей: переходного процесса YПП(t) и установившегося процесса YУСТ(t):
Y(t) = YПП(t) + YУСТ(t).
Математически переходный процесс определяется общим решением однородного уравнения (1.1), при Х(t)=0, а установившийся процесс – частным решением уравнения неоднородного уравнения (1.1), при заданной правой части Х(t). С точки зрения теоретической механики переходный процесс есть свободное движение системы, а установившийся процесс – вынужденное движение. С точки зрения теории колебаний первое есть собственные колебания, а второе – вынужденные колебания, но это ни в коем случае не означает, что переходный и установившийся процессы всегда по форме будут колебательными. Для получения переходной характеристики подают мгновенно скачком на вход звена некоторое постоянное значение вида:
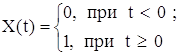
и наблюдают переходный процесс (свободные колебания) на выходе звена. На коммутационном поле АВМ эта модель входного воздействия реализуется на масштабном операционном усилителе с изменяемым согласно варианта задания коэффициентом усиления:

Такое идеальное звено не обладает инерционностью и мгновенно дает на выходе величину:
![]() (1.2)
(1.2)
Если на вход звена или системы подать сигнал синусоидальной формы с частотой ω вида:
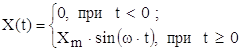 (1.3)
(1.3)
то на выходе в установившемся режиме получится тоже синусоидальный сигнал с той же частотой ω, но с другими амплитудой и фазой (наблюдение вынужденных колебаний звена).
2 Экспериментальная часть
Составим таблицу значений 2.1
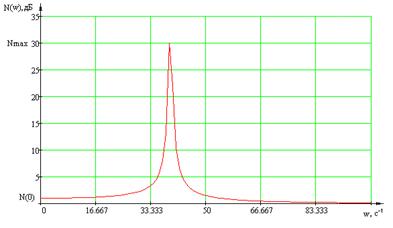
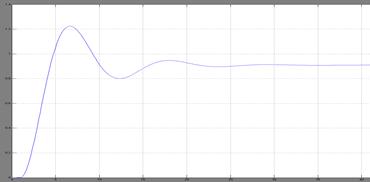
Построим график апериодического звена второго порядка, рисунок 2.1 и с помощью данного графика получим значение T2.
Рисунок 2.1 – график апериодического звена второго порядка
Вычислив А(ω) и φ(ω), построим годограф, рисунок 2.2.
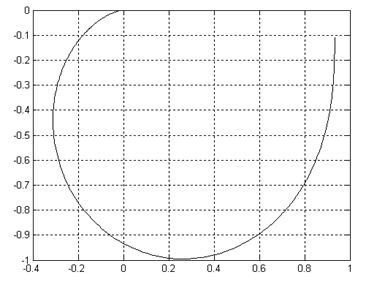
Рисунок 2.2. – Годограф А(ω)φ(ω)
Зная значение = 14 В, а = 15 В, можно рассчитать ![]() .
.
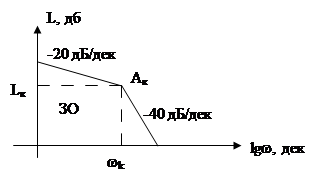
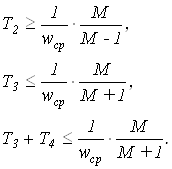
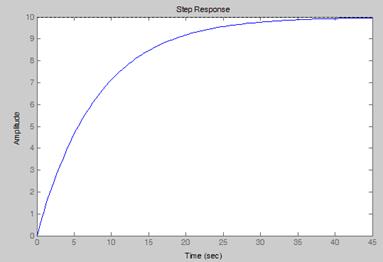
Исходя их графика для определения постоянных времени апериодического звена второго порядка, рисунок 2.3, найдём значение ![]() .
.
![]()
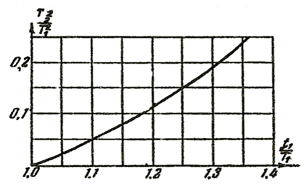
Рисунок 2.3 – График для определения постоянных времени апериодического звена второго порядка
Следует можем найти ![]() :
:
![]()
![]()
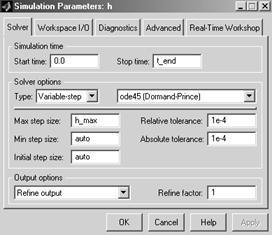
Воспользовавшись программой MatLab, построим графики характеристик: ФЧХ, АЧХ, ВЧХ, МЧХ, КЧХ, ЛАЧХ и ЛФЧХ.
В окна команд запишем:
>> m=[0.93333]
m = 0.9333
>> n=[1.3225 1.15 1]
n = 1.3225 1.1500 1.0000
>> tf (m, n)
Transfer function:
0.9333
1.323 s^2 + 1.15 s + 1
>> [h, w]=freqs (m, n, 600);
>> ampl=abs(h);
>> phi=angle(h);
>> phi=unwrap(phi);
>> plot (w, phi, 'k'); grid on
>> plot (w, ampl, 'k'); grid on
>> vchhar=ampl.*cos(phi);
>> plot (w, vchhar, 'k'); grid on
>> mchhar=ampl.*sin(phi);
>> plot (w, mchhar, 'k'); grid on
>> plot (vchhar, mchhar, 'k'); grid on
График ФЧХ представлен на рисунке 2.4.
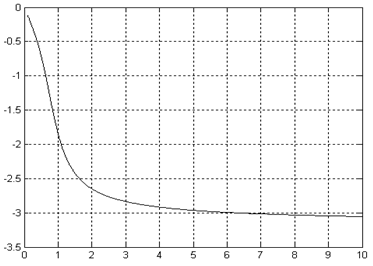
Рисунок 2.4 – График фазочастотной характеристики
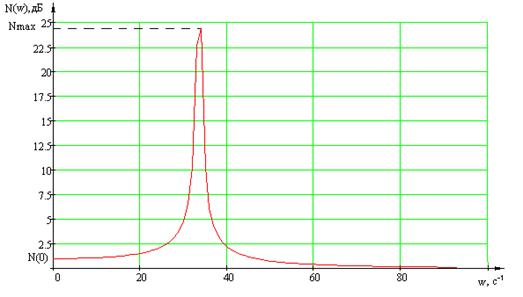
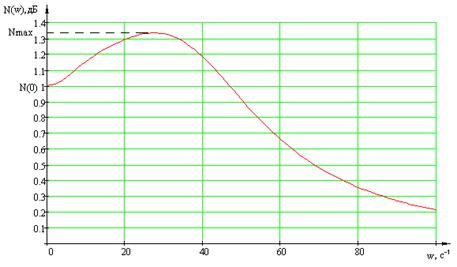
График АЧХ представлен на рисунке 2.5.
![]()
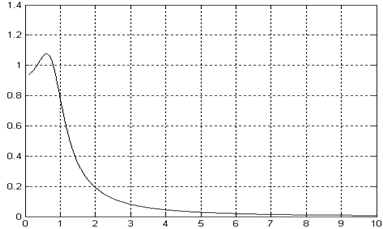
![]() Рисунок 2.5 – График амплитудо-частотной характеристики
Рисунок 2.5 – График амплитудо-частотной характеристики
График ВЧХ представлен на рисунке 2.6.
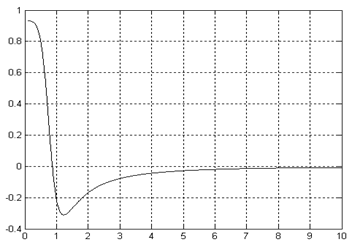
Рисунок 2.6 – График вещественной частотной характеристики
График МЧХ представлен на рисунке 2.7.
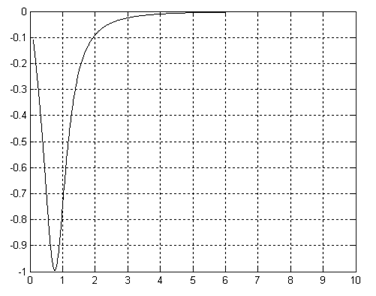
![]() Рисунок 2.7 – График мнимой частотной характеристики
Рисунок 2.7 – График мнимой частотной характеристики
График КЧХ представлен на рисунке 2.8.
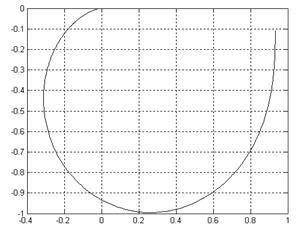
Рисунок 2.8 – График комплексной частотной характеристики
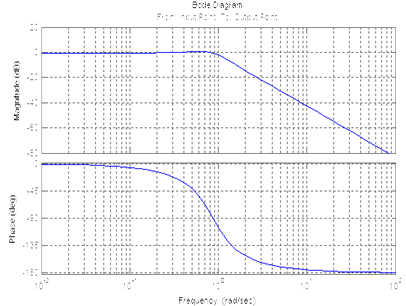
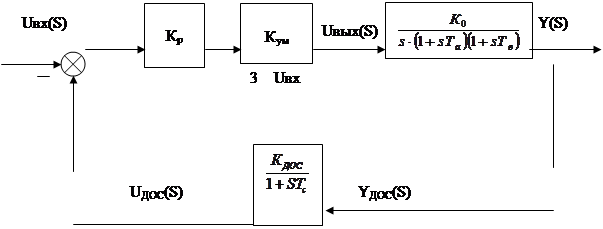
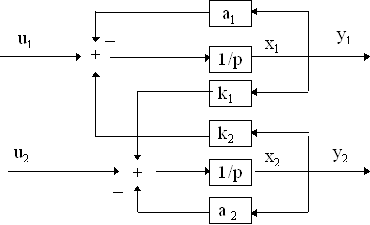
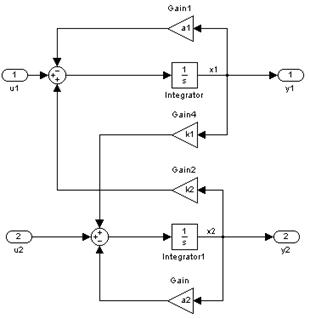
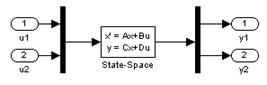
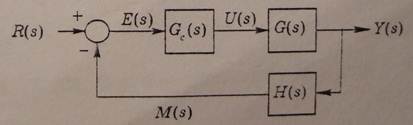
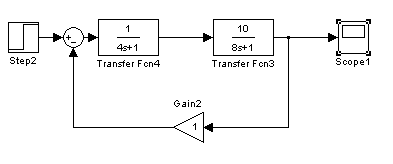
Для построения ЛАЧХ и ЛФЧХ составим структурную схему представленную на рисунке 2.9.

Рисунок 2.9 – Структурная схема для построения ЛАЧХ и ЛФЧХ
![]()
![]()
![]() Рисунок 2.9 – Графики ЛАЧХ и ЛФЧХ
Рисунок 2.9 – Графики ЛАЧХ и ЛФЧХ
Похожие работы
... устройства, которое нужно добавить к некоторой неизменяемой части системы, чтобы обеспечит требуемое качество системы в установившемся и переходном режимах. Наиболее приемлемым для решения задачи динамического синтеза является метод логарифмических амплитудных характеристик (метод ЛАХ). [1, § 12.5] Стадии синтеза по методу ЛАХ включают: 1. построение располагаемой ЛАХ, т.е. ЛАХ исходной ...
... работы Целью работы является анализ частотных характеристик разомкнутых и замкнутых систем, получение навыков по использованию критерия устойчивости Найквиста. В работе предусматривается исследование трех систем, различающихся видом передаточной функции (ПФ) разомкнутого контура. Варианты значений параметров ПФ приведены в табл. 3.1. Замкнутая система построена по типу классической следящей ...

... имеют некоторый типовой вид. Сложные (многосвязные) технические объекты в совокупности с узлами (устройствами) управления первого, исполнительного уровня образуют подсистемы оперативного управления, которые представляют собой многосвязные системы автоматического регулирования (МСАР) по типу следящих систем. Задающие воздействия для них формируются на втором, тактическом уровне, а цели управления ...

... в смеситель воды. Рисунок 2.1 – Схема управления плотностью бумажной массы Далее рассмотрим структурную схему данной системы: Рисунок 2.2 – Структурная схема управления плотностью бумажной массы На этой схеме: Gc(s)-регулятор. Передаточная функция регулятора: Предположим, что k=10, тогда: G(s)-исполнительный механизм. Передаточная функция исполнительного механизма: ...
0 комментариев