Навигация
Составление функциональной схемы проекта внутри ПЛИС 3.1
50593
знака
2
таблицы
31
изображение
3. Составление функциональной схемы проекта внутри ПЛИС 3.1
3.1 Использование сигнала UВ
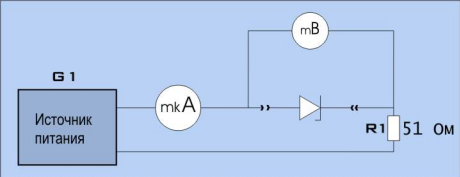
Так как находясь на открытой местности (во избежание сильного изменения диаграммы направленности), антенна обзорного радиолокатора подвержена значительным колебаниям ветра, которые в свою очередь оказывают отрицательное воздействие на работу устройства и могут вызвать ошибки в его работе, была применена простая схема, позволяющая избежать вышеуказанные недостатки. Схема представлена на рисунке 2.
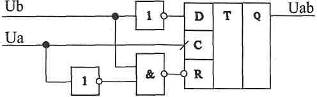
Рисунок 2 - Схема формирования сигнала U АB
Помимо сигналов UA, UR, с двух преобразователей ВАЛ – КОД (датчиков ЛИР-158А) на вход ПЛИС поступают сигналы UB, являющийся сдвинутым на четверть периода сигналом UА.
Как видно из рисунка 2, на тактируемый вход CLK D триггера подается сигнал UА, а сигнал не-UB - поступает на вход D, осуществляя игнорирование любого изменения сигнала UА, пока не закончится импульс UА. Таким образом, срабатывание триггера происходит по фронту сигнала UA, а сбрасывание – по одновременному появлению сигналов не-UА и UB на входе CLRN триггера смотри рисунок 3.
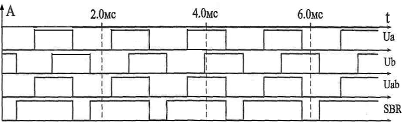
Рисунок 3 - Временные диаграммы формирования UAB
3.2 Выбор частоты синхронизации
Так как для реализации многих функций устройства (самоконтроль, формирователь импульсов, имитатор, формирователь управляющих сигналов питания датчиков) требуется тактирующий сигнал, выбор его частоты осуществим из следующих положений: Исходя из требований ТЗ, устройство должно формировать импульсы заданной длительности 40 ±8 мкс и имеющие определенное взаимное расположение смотри рисунок 4.
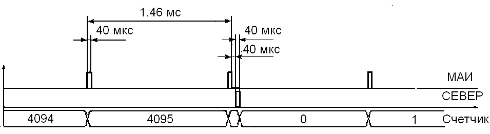
Рисунок 4 - Временные диаграммы формируемых импульсов
Обычно хорошей точностью считается превышение заданных характеристик хотя бы на порядок, выберем длительность импульсов синхронизации равной 1 мкс, таким образом, длительность сформированных сигналов составит 40 ±1 мкс. Так как входной синхросигнал имеет частоту 20 MHz, составим схему деления импульсов на 20, смотри рисунок 5.
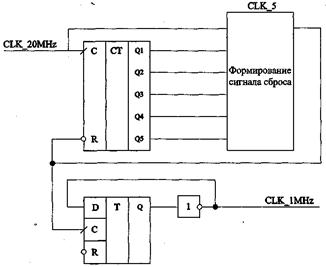
Рисунок 5 - Функциональная схема делителя частоты
На рисунке 5 представлена схема деления частоты на 20. Входной сигнал частотой 20 MHz поступает на синхронизирующий вход пяти разрядного счетчика. Блок CLK 5 осуществляет формирование строба через каждые 10 импульсов синхронизации с длительностью равной 50 нc (20 MHz) Выходные стробирующие импульсы поступают на синхронизирующий вход триггера, результатом работы которого является меандр частотой 1 MHz, смотри рисунок 6.

Рисунок 6 - Временные диаграммы формирователя частоты синхронизации
3.3 Контроль входных сигналов
Алгоритм контроля входных сигналов построен следующим образом: устройство должно осуществлять проверку входящих сигналов на основе данных об расположении импульсов UАВ и UR, положение которых в нормальном состоянии должно соответствовать рисунке 7.

Рисунок 7 - Временные диаграммы расположения входных сигналов
Так как сигнал UR несет в себе информацию о направлении антенны обзорного локатора на СЕВЕР, то его пропадание может вызвать нарушения в работе локатора, таким образом, необходимо осуществлять контроль данного сигнала, и, при возникновении неисправности, сигнализировать обслуживающий персонал о его исчезновении и осуществлять автоматическое переключение на другой оптический датчик, использующийся для резерва.
Согласно ТО на обзорный радиолокатор, скорость вращения антенны является величиной не постоянной и зависит от большого числа факторов таких как: скорость ветра, температура окружающей среды и т.д. Кроме того, при включении привода локатора выход антенной системы в рабочий режим происходит не мгновенно. Все эти факторы влияют на то, что период следования сигнала UR постоянно меняется. Согласно ТО, нормальным режимом работы локатора считается режим, при котором скорость вращения антенны составляет 1 оборот за 6 с.
Сигнал UА несет в себе азимутальную информацию и состоит из набора 4096 импульсов характеризующих изменение угла на 8 минут, поэтому по пришествию импульса UR, необходимо осуществлять их подсчет и сформировать сигнал аварии при несоответствии их числа 4096-ти, а также осуществить переключении на работу от второго оптического датчика, при необходимости.
Так как контролировать сигналы нужно по разным параметрам, целесообразно разделить функцию контроля входных сигналов на два отдельных модуля:
- Модуль SEVER _ 1,
- Модуль MAI _1.
- Модуль SEVER_1
- Структурная схема модуля SEVER_1представлена на рисунке 8.
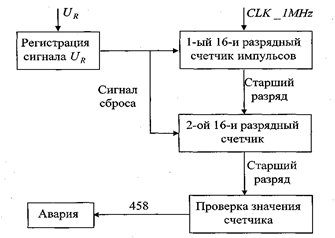
Рисунок 8 - Структурная схема модуля SEVER_1
Модуль SEVER _1 организуем таким образом: Так как скорость вращения антенны локатора не статична будем осуществлять ожидание появления сигнала UR в течение 30 с, что эквивалентно 5-и оборотам антенны при номинальном темпе обзора, составляющем 1 оборот за 6 с. По истечении этого срока будем формировать сигнал УХУДШЕНИЕ, а также сигналы управления датчиками (выключение первого оптического датчика, включение второго оптического датчика). При возникновении невозможности резервирования (вышли из строя 2-а датчика) будем формировать сигнал АВАРИЯ.
Модуль SEVER _1 представляет собой написанную на языке AHDL программу [1]. Заголовок модуля содержит объявленное заранее значение константы Т _ ZAD, несущее в себе информацию о значении до которого досчитал второй счетчик, и необходимое для быстрого изменения условий работы алгоритма.
Формирование необходимой паузы в 30 с организуем с помощью двух 16-и разрядных счетчиков COUNT _ 1 _ 1 и COUNT _ 2_ 1 на синхронизирующие входы которых подадим синхроимпульсы частотой 1 МГц для первого и старший разряд первого счетчика - для второго соответственно. Таким образом, для формирование необходимой паузы, второй счетчик должен досчитать до числа 458, при возникновении которого с помощью D триггера D2 _1 формируется строб STROB _SEVER _ 1, по которому осуществляется формирование сигнала VCC _ DATCHIK _ 1, управляющего работой оптического датчика смотри рисунок 9 (Здесь, для наглядности, показан один счетчик, и частота синхронизации увеличена в 100 раз). При появлении сигнала UR, счетчики сбрасываются, и цикл ожидания повторяется заново смотри рисунок 10. Помимо вышесказанного, сигнал управления питанием датчика - VCC _DATCHIK _1 формируется не в любое время (по возникновению STROB _ SEVER _1), а во избежания формирования искаженного импульса, только после окончания действия сигналов UAB и UR, благодаря JK триггеру D1_1, сброс которого осуществляется сигналом управления WORK смотри рисунок 11. Кроме того, функционирование модуля SEVER _1 осуществляется под воздействием внешних сигналов управления:
- WORK-Работа,
- USTIROVKA -Юстировка,
- MU - Местное управление.
При включении режима WORK осуществляется нормальная работа схемы и контроль входных сигналов. В режиме USTIROVKA или MU - контроль сигналов не функционирует и режим формирования сигналов УХУДШЕНИЕ и АВАРИЯ не происходит. Помимо этого в режиме USTIROVKA схема автоматически устанавливает сигнал VCC _DATCHIK 1 в положение, соответствующее работе первого оптического датчика.
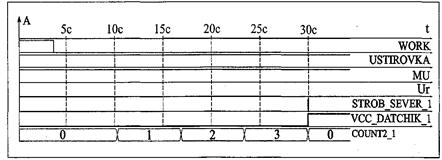
Рисунок 9 - Временные диаграммы формирования сигнала, управляющего питанием первого датчика
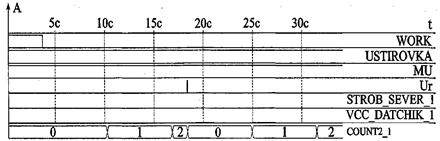
Рисунок 10 - Временные диаграммы сброса счетчиков сигналом UR
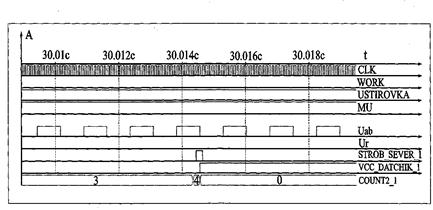
Рисунок 11 - Временные диаграммы формирования сигнала VCC _ DA TCHIK _ 1 по сигналу STROB _ SEVER _1 и UAB
Контроль расположения импульсов UА осуществим иначе:
В паспорте на оптический датчик (ЛИР-158А) сказано о возможности изменения числа импульсов 4096 в переделах ±15 импульсов, то по возникновению данной ситуации будем формировать строб отклонения числа импульсов от заданного. При сильных изменениях в числе импульсов UАв будем формировать сигнал АВАРИЯ, и устанавливать сигнал VCC DATCHIK 1, управляющий работой первого датчика, в положение выключено.
Модуль MAI__1
Структурная схема работы модуля MAI _ 1 представлена на рисунке 12.

Рисунок 12 - Структурная схема работы модуля MAI _ 1
Модуль MAI _1 представляет собой программу, написанную на языке
AHDL [1] и предназначенную для работы с сигналами, идущими с первого оптического датчика. В заголовке программы добавим обозначения констант.
NUM _ MAI _ МАХ (максимально допустимое число импульсов UАВ),
NUM _ MAI _ NORM (Нормальное число импульсов UАВ),
NUM _ MAI _ MIN (минимально допустимое число импульсов UАВ).
Изменение данных величин, по необходимости, позволяет быстро осуществить изменение условий работы модуля MAI _1. В качестве основных элементов программы являются два счетчика импульсов:
COUNT 1 _1 - 16-и разрядный счетчик импульсов UАВ.
COUNT 2 1 - 4-ех разрядный счетчик стробирующих импульсов
NE_NORMA_l.
Так как схема управляется внешними сигналами, и неожиданное переключение может вызвать незапланированное неправильное формирование сигнала ошибки, проверка числа импульсов UАВ осуществляется во время прихода второго импульса UR, в результате чего происходит формирование строба NORMA _ 1, если число импульсов соответствует 4096-и, NE _ NORMA _ 1, если число импульсов U АВ лежит в допустимых пределах и NE_V_ DOPUSKE_1, если их число выходит за значения, указанные в разделе констант, смотри рисунок 13. При работе схемы под воздействием управляющих сигналов ЮСТИРОВКА, MU_D1 или MU_D2, последние два действительны только при наличии дополнительного сигнала, включающего режим местного управления, схема контроля входных сигналов модуля MAI _1 прекращает свою работу и устройство не реагирует на возникновение каких-либо нарушений в работе оптических датчиков.
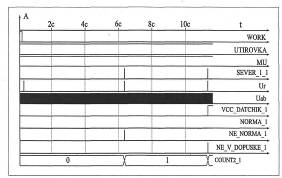
Рисунок 13 - Временные диаграммы работы модуля MAI _1
Как видно из рисунка 13, счетчик считает стробирующие импульсы NE_NORMA_1, появление же импульса NE_V _DOPUSKE_1 вызывает немедленное формирование сигнала VCC_DATCHIK _1. При возникновении импульса NORMA _ 1 происходит сброс счетчика, и работа схемы продолжается смотри рисунок 14. (Здесь, для наглядности восприятия, показана работа только второго счетчика)
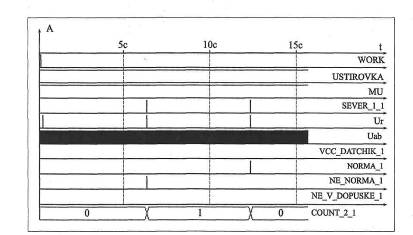
Рисунок 14 - Временные диаграммы сброса счетчика по сигналу NORMA_1
При появлении подряд трех стробирующих импульсов NE_NORMA _1 происходит формирование сигнала VCC _DATCHIK_ 1 и переключение на работу от второго оптического датчика.
Похожие работы
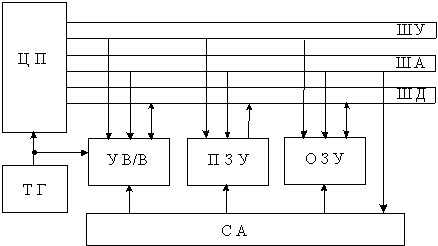
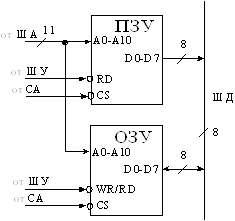
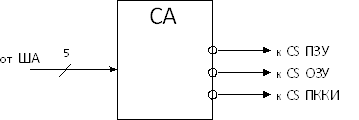
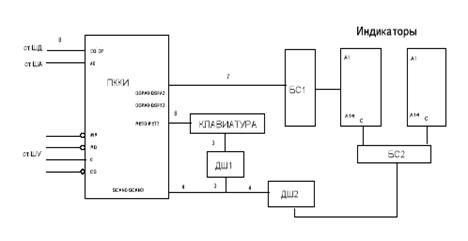
... ОЗУ – оперативное запоминающее устройство; СА – селектор адреса; ШУ – шина управления; ША – шина адреса; ШД – шина данных Рисунок 1 – Структурная схема микропроцессорного устройства Основным узлом разрабатываемого устройства отображения информации является ЦП. В его функции входит управление всеми остальными узлами устройства. Отдельные блоки соединяются между собой линиями, объединяемыми по ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...
... ( пока нужный сектор данных не окажется под головкой чтения/записи) составляет 13 мс против 8-15 мс для НЖМД. WORM системы используют довольно мощный лазер для записи информации. С помощью лазера WORM-устройства обрабатывают поверхность диска для изменения отражающей способности определённых участков диска или для удаления ямок с его поверхности (это достигается за счёт изменения поверхностного ...

... повышения надежности эксплуатации погружного оборудования, получения информации обоснованых параметров скважины, снижения эксплуатационных затрат за счет исключения сложных аварий 5.4 Подбор оптимального режима скважин эксплуатируемых установками ЭЦН и ТМС на Хохряковском месторождении. 1) Перевод на другой вид эксплуатации. Для УЭЦН: 1) Изменением типоразмера УЭЦН. 2) Заглублением ...
0 комментариев