Реферат на тему:
"Основные технические и эксплуатационные требования к системе управления движением судов (САСУДС)"
Назначение
Бортовая станция управления движением - СУД (Maneuvering Control Station) служит для дистанционного управления судовыми силовыми средствами и для задания различных режимов управления движением судна. На ней сосредоточены органы для управления курсом, траекторией и скоростью судна.
СУД представляет собой пульт управления. Силовые средства, используемые при маневрах судна, и системы дистанционного управления ими характеризуются в специальных курсах подготовки штурманского состава.
Состав.
На станции управления движением судна расположены:
Многофункциональный штурвал (или круглая поворотная рукоятка) для управления курсом;
Панель органов управления курсом и траекторией (Steering Controls);
Панель органов дистанционного управления пропульсивными устройствами (Main Engine and Thrusters Controls));
Дисплей для вождения судна (коннинг дисплей),
Рис.1. Внешний вид станции управления движением судна.
Когда судно полностью управляемо по всем горизонтальным степеням свободы на предельно малых скоростях хода и снабжено дистанционной автоматизированной системой управления позиционированием (маневровой системой), то на станции управления имеется дополнительно панель органов управления маневровой системы.
Состав органов управления на панелях станции зависит от конфигурации движительно-рулевого комплекса судна и типа систем для управления им.
Панель для управления курсом и траекторией.
На этой панели размещены органы, с помощью которых производится ручное управление судном по курсу, выбираются режимы управления курсом и траекторией судна, задаются параметры поворотов, производится настройка авторулевого.
Внешний вид панели управления курсом и траекторией СУД интегрированной системы ходового мостика фирмы "Praxix automation technology" (Голландия) представлен на рис 1.
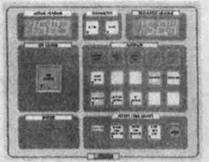
Рис.2. Панель управления курсом и траекторией.
Режимы управления курсом. Количество таких режимов зависит от типа установленного на судне авторулевого (АР).
Ручные режимы. Может быть два ручных режима для управления судном по курсу: "простой" и "следящий" или только один "следящий" режим.
Автоматические режимы управления курсом. Если на судне установлен неадаптивный АР, то автоматический режим один. Он обычно именуется - "Автомат" (Auto). В этом режиме, если не производится ручная настройка, коэффициенты закона регулирования остаются постоянными. Поэтому этот режим иногда называют "Auto-fixed".
Когда на судне адаптивный АР, то может быть несколько автоматических режимов управления курсом: один без адаптации "Auto-fixed" и два или три с адаптацией, отличающиеся используемым критерием оптимальности. Это может быть критерий безопасности, направленный на обеспечение максимальной точности регулирования, и экономичный - предусматривающий минимальный расход ресурсов. Первый из этих режимов часто называют "Стесненные воды" (Confined waters), второй - "Открытое море" (Open sea).
У некоторых адаптивных АР имеется и третий режим адаптации, специально для оптимизации управления в условиях шторма - "Штормовые условия" (Rough sea).
В режиме "Auto-fixed" авторулевой выполняет регулирование курса по неизменному закону с постоянными коэффициентами, некоторые из которых можно подстроить вручную.
В режимах адаптации при изменении внешних и внутренних условий работы авторулевой самостоятельно изменяет характер управления для обеспечения наилучшего по выбранному критерию качества управления. Адаптивные авторулевые обычно приспосабливаются к изменению загрузки, скорости судна, глубины на мелководье, к изменению степени волнения и характера рыскания.
Режимы управления движением но траектории.
Суда, на которых устанавливаются ИСМ, снабжаются системой автоматической вождения судна по заданной траектории - САВТ (Track Control System).
Со станции управления движением может устанавливаться ручной или автоматический режим проводки судна по траектории.
В автоматическом режиме САВТ сама без непосредственного участия человека проводит судно по запланированному пути, элементы которого должны храниться в памяти ИСМ. Автоматический режим часто именуют навигационным режимом (NAV). Для него могут использоваться и названия: "Track steering", "Track keeping", "Track auto". Некоторые САВТ дополнительно к названному имеют автоматический режим управления, обеспечивающий движение к заданной точке (Way point steering).
Регулировки для режима "Auto-fixed". В различных типах авторулевых при ручной настройке иа качественное управление регулируются разные параметры. Для настройки большинства находящихся в эксплуатации авторулевых используется - три-четыре регулировки. Встречаемые в АР виды регулировок приведены ниже.
Регулировка общего коэффициента усиления управляющего сигнала (кР). Такая регулировка называется "Руль" (Rudder). С ее помощью пропорционально изменяется величина вырабатываемого АР заданного значения перекладки руля Диапазон выбора кр обычно составляет 0.5…5.0.
Регулировка коэффициента усиления управляющего сигнала, пропорционального производной рыскания (кД). Регулировка кд определяет степень одерживания судна рулем. Чаще всего она называется "Коитрруль" (Counter rudder). Диапазон изменения значений кд лежит в пределах от 0 до 30. Для установки регулятора обычно используется шкала с условными делениями, от нуля до единицы, либо от нуля до десяти.
Регулировки для подстройки АР к работе при плохой погоде. Для этой цели может применяться регулировка зоны нечувствительности, либо регулировка скорости руля. Они предназначены для уменьшения частоты и величины перекладок руля при рыскании судна на волнении.
С помощью первого регулятора загрубляется работа авторулевого путем увеличения диапазона его нечувствительности в условиях волнения. Зона нечувствительности может выбираться в пределах 0°+3°. Этот регулятор называется "Рыскание-" (Yaw). В некоторых АР для него используется название "Погода" (Weather).
Регулятор "Скорость руля" (Rudder's rate) служит для снижения реакции авторулевого на волновое рыскание путем уменьшения скорости руля. С увеличением рыскания судна от волн скорость руля уменьшают.д.иапазон выбора регулируемого параметра обычно составляет 1.5+5.0 /с.
Регулировка "Рулевой предел" (Rudder limit) используется для ограничения максимального значения перекладок руля. Применяется она с целью избежания значительных углов крена при поворотах. Диапазон выбора ограничений обычно составляет 5°…35°.
Системы управления движением судов (СУДС) Транзас - современные автоматизированные системы, необходимые для повышения безопасности мореплавания, безопасности жизни на море и защиты окружающей среды от возможных негативных последствий судоходства, а также повышения эффективности навигации и грузоперевозок.
Разработка систем управления движением судов началась в компании Транзас в начале 1990-х годов. Надежность в работе и качество СУДС позволили за очень короткий срок выйти как на российский, так и на международный рынки. В настоящее время системами СУДС Транзас оснащены более 100 портов в 34 странах мира.
Системы управления движением судов предоставляют пользователям различную навигационную информацию, позволяют идентифицировать и сопровождать суда и другие навигационные объекты в прибрежных акваториях, а также планировать судоходство в прибрежных водах.
Основные задачи, решаемые СУДС:
получение информации о навигационной обстановке от различных сенсоров
обобщение данных о целях и представление их в табличном виде и графически в сочетании с многослойными электронными картами
оперативный контроль за движением судов
планирование графика движения судов
анализ навигационной ситуации и выдача сигнала тревоги и предупреждения в соответствии с задаваемыми оператором критериями
предоставление вспомогательной навигационной и прочей информации
цифровая запись данных всей навигационной ситуации для последующего воспроизведения
За последние 10-15 лет количество СУДС почти удвоилось, и сегодня в мире насчитывается свыше 500 СУДС различного масштаба и назначения. Это связано не только с увеличением грузооборота портов и интенсивности судоходства, но и с реальной угрозой экологических бедствий вследствие морских аварий с крупнотоннажными танкерами и другими судами с опасными грузами.
Современные СУДС рассматриваются как важный и неотъемлемый элемент обеспечения безопасности мореплавания, создаются и функционируют в соответствии с международными и национальными правовыми и нормативными актами. Правило V/19 Международной Конвенции по охране человеческой жизни на море (SOLAS) и связанная с ним Резолюция IMO А.857 (20) определяют, что СУДС создаются в целях охраны человеческой жизни на море, безопасности и эффективности судоходства и защиты окружающей среды. Правительства прибрежных государств обязуются создавать СУДС там, где по их мнению, достаточно высоки интенсивность судоходства или степень риска аварий.
Основные функции СУДС:
организация и регулирование судоходства на акваториях портов и на подходах к ним, контроль за соблюдением правил плавания;
обеспечение безопасности мореплавания в сложной навигационной, метеорологической и гидрологической обстановке;
защита окружающей среды за счет снижения риска аварий и разливов нефтепродуктов;
содействие лоцманским службам, поисково-спасательным операциям и операциям по борьбе с разливами нефтепродуктов;
контроль за судоходством в прибрежных водах в интересах государства, информационное обеспечение пограничных и таможенных режимов.
Технологическая основа СУДС:
береговые радиолокационные станции (РЛС);
оборудование Автоматической идентификационной системы (АИС);
телевизионные системы наблюдения;
системы обработки и отображения информации;
средства ОВЧ (УКВ) радиотелефонной связи с судами;
ОВЧ (УКВ) радиопеленгаторы;
радиорелейные линии связи;
вычислительные сети и сети передачи данных;
электронная картография.
По назначению и особенностям района действия СУДС подразделяются на следующие категории:
портовые, действующие на акваториях портов и на подходах к ним;
речные, действующие на внутренних водных путях, на подходах к портам, расположенным в реках и эстуариях;
прибрежные, осуществляющие контроль за судоходством в территориальных водах прибрежных государств или в международных проливах;
По размерам района действия и особенностям организации СУДС подразделяются на:
локальные, обслуживающие ограниченные акватории, небольшие участки побережья или внутренних водных путей;
региональные, обслуживающие акватории протяженностью в десятки и сотни миль.
Региональные СУДС образуются, как правило, посредством информационной интеграции нескольких портовых и прибрежных СУДС, центры которых обмениваются информацией между собой и являются субцентрами региональной СУДС.
Типовая структура СУДС включает Центр СУДС и связанные с ним удаленные радиотехнические посты (РТП), где располагаются источники информации (РЛС, оборудование АИС, телекамеры, радиопеленгаторы) и средства связи. Передача информации от РТП в Центр СУДС производится с использованием радиорелейных или наземных линий связи. Центр СУДС является местом, где обрабатывается и анализируется поступающая информация, где принимаются управляющие решения и откуда осуществляется взаимодействие с судами. Обработка информации в СУДС, как правило, полностью автоматизирована и выполняется компьютерами общего или специального назначения. В результате обработки информации формируется картина судоходной обстановки, отображаемая на ситуационных дисплеях.
Управляющими звеньями СУДС являются операторы, которые анализируют судоходную обстановку, оценивают и прогнозируют ее развитие. Операторы СУДС посредством ОВЧ (УКВ) радиосвязи передают для судов информацию, предупреждения, рекомендации и указания, обеспечивающие безопасное и эффективное судоходство в районе действия СУДС.
Суда в районе действия СУДС обязаны выполнять специальные правила плавания, отражающие специфику района, его навигационные характеристики и правовой статус, особенности взаимодействия судоводителей и лоцманов на мостике судна с операторами СУДС. Эффективное выполнение СУДС своих функций обеспечивается высокой надежностью технологического оборудования, квалификацией и профессионализмом персонала, а также регламентацией и контролем работы СУДС со стороны национальной морской Администрации.
Литература
1. А.И. Родионов, А.Е. Сазонов "Автоматизация судовождения", М., 1983
2. Л.Л. Вагущенко, Н.Н. Цымбал "Системы автоматического управления движением судна", Одесса, 2002
3. Л.Л. Вагущенко "Интегрированные системы ходового мостика", Одесса, 2003.
0 комментариев