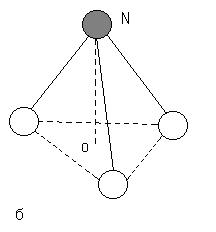
Каждая молекула может быть отнесена к одной из точечных групп 14 типов. Эти точечные группы состоят из строго определенных операций симметрии и никакие другие точечные группы невозможны. Однако, сопоставляя молекулу с одной из перечисленных выше групп симметрии, следует тщательно выбирать более полную группу, к которой принадлежит молекула. Неполная группа допускает асимметрию в потенциальном поле вокруг атома, что из физических соображений часто не бывает. Например, плоская молекула ZX3 вряд ли обладает симметрией C3, ибо тогда распределение потенциала могло бы быть такое как на рисунке, хотя совершенно ясно, что оно невозможно физически. Ее симметрия и не D3 (C3, 3C2), ибо в этом случае распределение потенциала могло бы быть пространственно в виде трехлопастного винта. Полная симметрия плоской молекулы типа ZX3 - D3h (C3, 3C2, 3sv, sh).
После установления полной симметрии молекулы можно классифицировать атомы на эквивалентные. Эквивалентными атомами называются атомы, которые переходят друг в друга при всех преобразованиях симметрии. Все эквивалентные атомы, разумеется, одинаковы в химическом отношении. Обратное, конечно, не справедливо. Число эквивалентных атомов не может превышать полный порядок группы (т.е. число операций), однако, может быть меньше. Для любого вида эквивалентных атомов совокупность операций, оставляющих данный атом неизменным, образует подгруппу данной группы G. В частном случае такая подгруппа может либо совпадать с подгруппой G, либо состоять лишь из одного элемента E (C1). Подгруппа атомов X в молекуле ZX3 есть C2v (Е, C2, sv, sh).
Поскольку мы идентифицировали элементы группы симметрии с некоторыми определенными геометрическими операциями, мы постараемся найти для них аналитические выражения, т.е. представления. Сначала мы обсудим геометрический смысл представлений и укажем до какой степени геометрическая интуиция может служить для их нахождения. Вместо действительного указания операций группы мы можем, очевидно, указать численное значение некоторой величины, связанной с симметричной фигурой для каждой из операций. Например, в циклической группе Cn мы можем, начиная с произвольно выбранной точки, обозначить каждую операцию Cnp величиной соответствующего угла вращения
| E | Cn1 | Cn2 | Cn3 | Cnk | Cnn |
| 0 | 1*2p/n | 2*2p/n | 3*2p/n | k*2p/n | n*2p/n |
Недостатком такого "представления" является то, что соответствующая операция с углами не является умножением, а представляет собой сложение с последующим взятием остатка от целого кратного 2p.
Например, 2*2p/5+4*2p/5=12p/5 = 2p+2p/5.
Но одним из требований для пригодных представлений является то, чтобы они имели, как и их операции или обычное, либо матричное умножение. Так в примере с Cn можно вместо значения угла выбрать комплексную координату на единичном круге.
| Е | Cn2 | Cn3 | Cnk | ……. | Cnn |
| ехp (2pi /n) | ехp (2pi /n) 2 | ехp (2pi /n) 3 | ехp (2pi /n) k | …. | ехp (2pi /n) n |
Тогда для последовательных преобразований мы будем иметь причем это число будет уже удовлетворительным представителем группы. В более общем случае можно было бы рассматривать три координаты X,Y,Z точки на единичной сфере, и смотреть, что с ними происходит при различных преобразованиях группы. Если операция R группы переводит точку М (X,Y,Z) в положение M¢ (X¢,Y¢,Z¢), то это преобразование координат может быть записано:
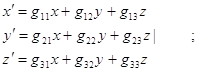

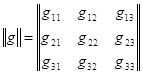
Тогда набору из 9 чисел g11, g12,..., g33 могут быть сопоставлены операции G в качестве ее представления. Однако, единственный путь ввести для этих чисел простые правила умножения - это взять их в виде матрицы:
Так, в частности, операция отражения в плоскости sz, операция идентичности Е и инверсии I в начале координат будут иметь вид:

Последовательное применение нескольких операций будет описываться матричным произведением исходных представлений. Действительно, пусть преобразование А дает X¢=АX. Последующее преобразование B дает: X¢¢=BX¢, или через X: X¢¢=BAX, X¢¢=CX, где C=BA. Преобразование с коэффициентами C является произведением двух преобразований и осуществляет таким образом представление операции C=AB.
В частности, зеркально-поворотная ось четвертого порядка S41=C41*Cn2 может быть представлена матрицей:
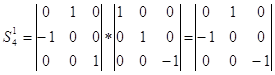
Этот же результат можно было получить, рассматривая непосредственное изменение координат при операции sh и последующей операции C41.
Таблица 2
Таблица умножения группы C4v.
| E | C41 | C43 | C42 | sx | sy | sd1 | sd2 |
| C43 | E | C42 | C41 | sd1 | sd2 | sy | sx |
| C41 | C42 | E | C43 | sd2 | sd1 | sx | sy |
| C42 | C43 | C41 | E | sy | sx | sd2 | sd1 |
| sx | sd1 | sd2 | sy | E | C42 | C41 | C43 |
| sy | sd2 | sd1 | sx | C42 | E | C43 | C41 |
| sd1 | sy | sx | sd2 | C43 | C41 | E | C42 |
| sd2 | sx | sy | sd1 | C41 | C43 | C42 | E |
Таким образом, каждому преобразованию симметрии можно сопоставить некоторую матрицу. Существует взаимно однозначное соответствие между операциями симметрии и матрицей преобразований пространства. Например, для группы C4v мы можем построить матрицы размером 8х8 следующим образом: представление операции R получается заменой на единицу тех элементов в таблице умножения, которые соответствуют этому элементу; в остальных местах таблицы элементы следует заменить нулями. Таким образом могут быть получены так называемые регулярные представления группы. С помощью матричного умножения можно убедиться, что правила перемножения этих матриц удовлетворяют приведенной таблице умножения, и, таким образом, сами преобразования симметрии и матрицы регулярного представления образуют изоморфные группы.
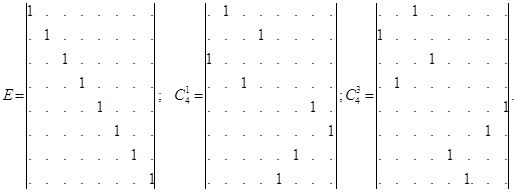
Можно построить для каждого преобразования группы матрицы размерностью 3х3, определяющие преобразование точки трехмерного пространства. Для группы C4v каждому преобразованию симметрии можно сопоставить следующие матрицы преобразования пространства:

Здесь приведены матрицы преобразования точки на единичной сфере. Они удовлетворяют таблице умножения группы, что легко проверить. Однако, возникает вопрос о том, возможны ли другие способы нахождения представлений. Рассмотрим, например, единичную матрицу (1) и примем E= (1); C41= (1); C42= (1); C43= (1) и так далее. Оказывается, что этот набор матриц тоже удовлетворяет таблице умножения группы, т.е. первоначальный выбор был не самым простым. Поиск других комбинаций матриц первого ранга показывает, что имеется всего четыре таких набора. Пятый набор включает матрицы второго ранга (состоящий из двух столбцов и двух строк), так что это так называемое двумерное представление.
Таблица 3
Представления группы C4v
| Пред-ставле-ние |
E |
C41 |
C42 |
C43 |
sx |
sy |
sd1 |
sd2 |
| Г (1) | + (1) | + (1) | + (1) | + (1) | + (1) | + (1) | + (1) | + (1) |
| Г (2) | + (1) | + (1) | + (1) | - (1) | - (1) | - (1) | - (1) | - (1) |
| Г (3) | + (1) | - (1) | + (1) | + (1) | - (1) | - (1) | - (1) | - (1) |
| Г (4) | + (1) | (1) | + (1) | - (1) | + (1) | - (1) | - (1) | - (1) |
| Г (5) | 1 0 0 1 1 0 0 1 | 0-1 1 0 0 1 1 0 | -1 0 0-1 1 0 0-1 | -1 0 0 1 1 0 0-1 | 0 1 1 0 0-1 1 0 | 0 1 1 0 0 0 0 0 | 1 0 0 1 1 1 1 1 | 1 0 0 1 0 1 1 0 |
Пример набора матриц 3*3 уже был рассмотрен. Однако при более детальном рассмотрении обнаруживается, что в действительности матрицы разбиваются на блоки 2*2 и 1*1. Видно, что матрицы, полученные при разбиении на блоки, являются представлениями групп.
Возникают случаи, когда получают матрицы ранга 4*4 или выше, но исследование всех этих матриц показывает, что их всегда можно разбить на блоки более простых матриц, которые для группы C4vвсегда связаны с пятью представлениями. Эти пять наборов матриц, таким образом, имеют особое значение, и их называют неприводимыми представлениями. Необходимо заметить, что такой интуитивный метод нахождения представлений делает ясным их геометрический смысл, но имеет серьезные недостатки. Имеется слишком большой произвол в выборе численной величины, ассоциированной с симметричной фигурой и нет простого пути убедиться, все ли возможные представления найдены. Так же мы не знаем, являются ли полученные представления независимыми или нет. Еще одно возражение состоит в том, что никакой наглядный смысл не может быть приписан представлениям с матрицами порядка выше третьего. В результате мы должны употреблять другие, более формальные методы получения представлений за исключением лишь самых простых случаев.
Симметрия потенциальной и кинетической энергийПри рассмотрении симметрии молекулы речь шла о равновесной конфигурации, тогда как при решении колебательной задачи особенно интересно рассмотреть деформированную молекулу. Деформацию молекулы можно представить векторами смещений атомов из положения равновесия. Можно использовать декартовы координаты смещения Xi, Yi, Zi для каждой молекулы (i - номер молекулы).
Если деформированная молекула подвергается действию операций симметрии, допускаемых недеформированной молекулой, то в результате получается новая конфигурация, которая отличается от первоначальной, но всегда ей эквивалентна в том отношении, что межатомные расстояния и углы остаются теми же самыми. Поэтому операции симметрии можно рассматривать как операции, при которых меняются местами не атомы, а смещения эквивалентных атомов.
Поскольку потенциальная энергия U является только функцией расстояний между атомами и углов между связями, она не изменяется при применении операций симметрии, которые допускаются равновесными конфигурациями. Это означает, что потенциальная энергия молекулы в деформированной конфигурации имеет то же самое численное значение, что и в конфигурации, полученной при применении любого преобразования симметрии равновесной конфигурации.
Кинетическая энергия обладает теми же свойствами, поскольку она определяется величинами dX/dt, dY/dt, dZ/dt, которые можно рассматривать как компоненты векторов скорости, и которые преобразуются так же как и вектора смещений. Следовательно, полная энергия системы V+T является инвариантной относительно всех преобразований симметрии равновесной конфигурации.
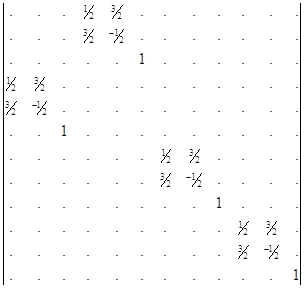
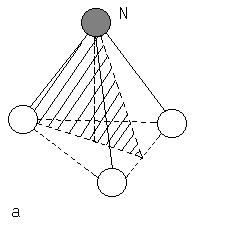
Представления в пространстве 3n координат смещения молекулыДействия операций симметрии на деформированную молекулу можно представить аналитически линейным преобразованием, связывающим новые смещения X`, Y`, Z` со старыми X, Y, Z. Например, преобразование смещений атомов в ионе NO3 при применении отражения в плоскости sV
Х1 ® Х1` = 1/2 Х2 + 3/2 Y2
Y1 ® Y1` = 3/2 Х2 - 1/2 Х2
Z1 ® Z1` = Z1
Х2 ® Х2` = 1/2 Х1 + 3/2 Y1
Y2 ® Y2` = 3/2 Х1 - 1/2 Y1
Z2 ® Z2` = Z2
Х3 ® Х3` = 1/2 Х3 + 3/2 Y3
Y3 ® Y3` = 3/2 Х3 - 1/2 Y3
Z3 ® Z3` = Z3
Х4 ® Х4` = 1/2 Х4 + 3/2 Y4
Y4 ® Y4` = 3/2 Х4 - 1/2 Y4
Z4 ® Z4` = Z4
т.е. матрица преобразования X¢=А*X такова:
Потенциальная и кинетическая энергия являются инвариантными по отношению к данному преобразованию. Если два такие преобразования представляют собой операции симметрии молекулы, то их произведение тоже должно представлять операцию симметрии молекулы. Существуют также тождественное преобразование, матрица которого имеет только единицы на главной диагонали. Т.к. такая система линейных преобразований обладает всеми необходимыми свойствами группы, можно сказать, что эти преобразования, также как и сами операции составляют группу.
Группа, образованная самими физическими операциями симметрии и группа, образованная линейными преобразованиями, очевидно, тесно связаны между собой - каждый из элементов одной группы взаимно однозначно соответствует элементу другой группы. Аналогично обстоит дело и с произведениями элементов. Такие группы изоморфны, а группа линейных преобразовании (линейных подстановок) будет осуществлять представление группы операции симметрии. Координаты Хi, Yi, Zi, с помощью которых эти представления записываются, называются базисом представления.
Система координат, в которой были записаны преобразования, была выбрана произвольно, но подобные результаты получились бы в любой другой системе координат. В матрице появились бы другие коэффициенты, но общие заключения остались бы справедливыми. Действительно, пусть bk - новые, а ai - старые координаты, связь между которыми дается следующим выражением:
bk= S аkjaj k,j=1,2,3... .3N
Это преобразование может быть просто поворотом системы на некоторый угол. Существует также обратное преобразование:
ai= S (аin) - 1bn i,n=1,2,3... .3N
Если координаты смещений атомов ai при преобразовании R переходят в координаты ai` и описываются таким преобразованием:
ak` = S Rkjaj k,j=1,2,3... .3N,
то новые координаты bk` можно получить:
bk`=S аkjaj`=S аijRjiai= SakjSRji (ain) - 1an= S (S аkjRji (ain) - 1) bn
Когда два представления отличаются только тем, что базисные координаты одного являются линейными комбинациями координат другого, говорят, что представления эквивалентны, т.е. представление Rji эквивалентно представлению SаkiRji (аin) - 1. Эквивалентность представлений может быть установлена на основании того, что соответствующие представления имеют одинаковый spur, или характер, т.е. величина
c (R) = SRii=R11+R22+R33+... +R3N3N
постоянна для данного преобразования симметрии R. Легко показать, что преобразования, соответствующие эквивалентным представлениям имеют одинаковые характеры представлений.
c (R) =S [amiRik (akm) - 1] =Rik [ami (akm) - 1] =Rikdki=Rii=c (R)
Для линейного преобразования к новым координатам справедливо (аkm) - 1ami=dki.
Предположим, что мы каким-то образом нашли преобразование от декартовых координат смещения X, Y, Z к нормальным координатам Qi. Известно, что в этом случае координаты при преобразованиях симметрии не смешиваются, а потенциальная и кинетическая энергии имеют вид квадратичной функции:
![]() ,
, ![]()
Координаты с двумя значками вырождены fk раз. Существует fk таких колебаний с частотой li1/2. fk - степень вырождения. Если теперь мы применим к молекуле операцию симметрии R она не может влиять на физическое состояние молекулы, поскольку Т и V являются инвариантными относительно любого преобразования группы симметрии молекулы.
Поэтому единственный эффект, который может произвести это преобразование R на невырожденную координату Qi - это либо оставить ее неизменной, либо сменить знак на обратный, т.е.
RQi=cQi.
Это же видно из квадратичной формы V и T. Вырожденные переменные Qka определяются неоднозначно, они перемешиваются между собой, но ортогональные их комбинации остаются нормальными координатами. Условия инвариантности V и T будут удовлетворены, если R преобразует каждую Qka в комбинацию всех координат, соответствующих одной и той же частоте lk1/2.
RQka=SаkabQkb (k=1,2,...,fk).
Поэтому представление данной операции группы симметрии будет выглядеть так:
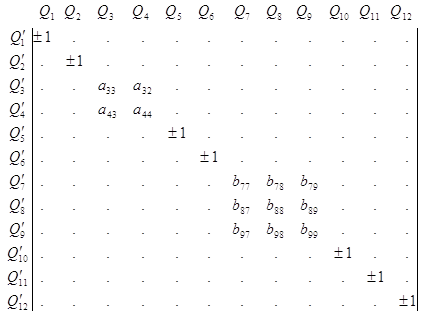
Т.о. представление в нормальных координатах будет иметь самый простой вид. Вообще, новая система координат может быть выбрана так, что преобразование, представляющее любую операцию симметрии будет выглядеть диагональным:
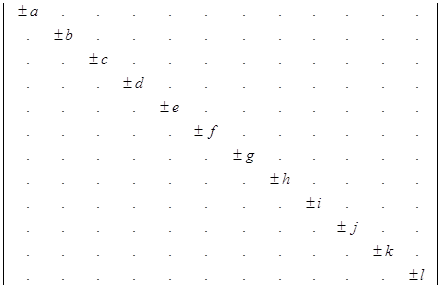 ,
,
т.е. всякая координата будет преобразовываться в себя с некоторым множителем. Но не всегда можно найти такую систему координат, чтобы каждое преобразование группы имело самый простой вид, но нельзя одновременно это сделать со всеми преобразованиями R. Однако обычно можно найти такую систему координат, в которой будут значительно упрощены все преобразования группы. Тогда, очевидно, группы определенных координат не будут смешиваться при любых преобразованиях группы. В такой системе координат представления наиболее простые и называются они неприводимыми представлениями. Для описания неприводимых представлений мы воспользовались концепцией нормальных координат в качестве конкретного примера. Однако, следует помнить, эта концепция неприводимых представлений совершенно не зависит от представления о нормальных координатах или проблемы молекулярных колебаний. Она появляется всякий раз, когда система линейных преобразований имеет свойства группы.
Итак, если имеется представление в виде матрицы Г (R) =|аi|; |аik|=0, то часто возможно найти преобразование координат такое, что все матрицы будут иметь форму:
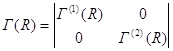
Тогда представление Г (R) называется приводимым, а Г (1) (R) и Г (2) (R) - неприводимыми, если их невозможно далее упростить. h операций группы могут действовать на любое число i переменных ki (молекулы с разным числом атомов). Полное представление группы по отношению к этим переменным будет состоять из матриц с i строками и i столбцами. Если мы напишем такую матрицу в приведенной форме, некоторые из матриц неприводимых представлений могут появиться более чем один раз (некоторые могут не появиться совсем), т.к число i не зависит от группы. Символически это обозначают так:
Г (R) =S n (i) Г (i) (R),
где n (i) дает число раз, которое неприводимое представление Г (i) (R) содержится в приводимом Г (R). Можно символически записать то же самое для любой операции R группы т.е.:
Г=S n (i) Г (i).
Свойства характераЗадача нахождения всех представлений группы является довольно громоздкой. Однако, в большинстве приложений достаточно знать лишь характеры представлений. Мы сформулируем без доказательства некоторые свойства характера.
1. Если для конечной группы имеется r классов, то всего может быть только r неприводимых представлений Г (1),... Г (r). Характеры преобразований одного класса одинаковы.
2. Класс Е всегда представляется единичной матрицей. Характеры представлений c (i) (Е) таким образом равны порядку представления и являются делителем порядка группы.
3. Порядки представления могут быть получены из соотношения:
[c (1) (E)] 2+ [c (2) (E)] 2+... ... [c (r) (E)] 2=g
где g - порядок группы (число элементов группы).
4. Характеры образуют ортогональную систему:
Sc (j) (R) c (i) (R) =gdji
Вообще, не только характеры, но и сами представления ортогональны. Характеры c (R) приводимых представлений даются равенством:
![]()
Это равенство полностью определяет r чисел n (j), т.к путем образования скалярного произведения с c (j) (R), суммирования по всем элементам группы и учета ортогональности мы имеем:
![]()
или при суммировании по классам:
![]()
где hi - число элементов в классе.
Определение характеров приводимого представления c (r)Число нормальных координат с данными свойствами симметрии может быть получено, если известны характеры преобразования координат смещения. Характеры могут быть найдены непосредственно из преобразования координат для данной операции симметрии, но лучше использовать другие методы, которые позволяют это сделать проще. По определению c (R) =SRii, где Rii - диагональный элемент преобразования Rij соответствующего операции R. Если эта операция R заменяет в равновесной конфигурации атом 1 на 2, то в деформированной молекуле она заменяет смещение атома 1 смещением атома 2. Следовательно, новая координата ai атома 1 выражается через старые координаты bi атома 2, так что все диагональные элементы матрицы преобразования Rii равны нулю для всех i, относящихся к атому 1.
Т.о. вклад в характеры дают только те атомы, которые не изменяют свое равновесное положение при применении данной операции симметрии R. Для тождественной операции E - это все атомы, для плоскости s это все атомы, лежащие в этой плоскости и т.д. В общем случае для операции вращения Cz (j) преобразование таково:
x¢ = x×cosj - y×sinj
y¢ = x×sinj + y×cosj
z¢ = z
Следовательно каждый атом, лежащий на оси C (j) вносит в характер в виде слагаемого величину 1+2cosj Для зеркального поворота Sz (j):
x¢ = x×cosj - y×sinj
y¢ = x×sinj + y×cosj
z¢ =-z
Поэтому вклад в характер для атома, лежащего на пересечении оси C (j) и плоскости sh будет - 1+2cosj. Для всех других атомов вклад будет равен нулю. Вклад в характер для всех остальных операций можно получить, ибо Е=C (0) =C1; s=S (0) =Si, I=S (p) =S2. Типы операций C (j) и S (j) называют иногда правильными и неправильными операциями.
Таблица 4. Вклады в характеры
| Правильные операции | Неправильные операции | ||
| R | c (R) | R | c (R) |
| Cnk | 1+2cos | Snk | -1+2cos |
| E=C1 | 3 | s=S1 | 1 |
| C21 | -1 | I=S2 | -3 |
| C31, C32 | 0 | S31, S31 | -2 |
| C41, C43 | 1 | S41, S43 | -1 |
| C61, C65 | 2 | S61, S65 | 0 |
Если на элементе симметрии C (j) находится Uc атомов, а на элементе S (j) - Us атомов, то характеры полных приводимых представлений будут:
cc=Uc (1+2cosj) cs=Us (-1+2cosj)
Они, однако, относятся к представлениям в пространстве всех 3N переменных. Чтобы получить характер, соответствующий представлению в пространстве 3N-6 нормальных координат, нужно вычесть характеры, соответствующие трансляциям и вращениям. Рассмотрим трансляции молекулы как целого. N векторов смещения ядер в этом случае эквивалентны результирующему вектору, действующему на центр тяжести молекулы. Три компоненты этого вектора при операции R преобразуются как любые другие смещения. Поэтому характер трансляции равен 1+2cosj для C (j) и - 1+2cosj для S (j). Пусть теперь смещения ядер таковы, что они дают физическое вращение молекулы как целого. Это движение можно охарактеризовать с помощью вектора углового момента l, который не полярным вектором, а аксиальным вектором: l= [r,dr]. Три компоненты этого вектора равны:
lx= y×dz-z×dy
ly=-x×dz+z×dx
lz= x×dy-y×dx
Можно показать, что компоненты вектора l преобразуется при вращении Cz (j) следующим образом (хотя бы с помощью простой подстановки):
lx¢ = lx×cosj - ly×sinj
ly¢ = lx×sinj + ly×cosj
lz¢ = lz
С другой стороны, воздействие S (j) выражается при помощи равенств:
lx¢ = - lx×cosj + ly×sinj
ly¢ = - lx×sinj - ly×cosj
lz¢ = lz
Характер ротации таким образом равен 1+2cosj для C (j) и 1-2cosj для S (j). Поэтому характер представления, относящийся к пространству 3N-6 координат равен:
cc=Uc (1+2cosj) - (1+2cosj) - (1+2cosj) = (Uc-2) (1+2cosj)
cs=Us (-1+2cosj) - (1+2cosj) - (1-2cosj) =Us (-1+2cosj)
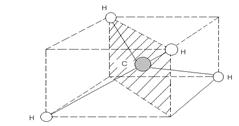
Чтобы проиллюстрировать сказанное, рассмотрим молекулу CCl3H, CHCl3 [XY3Z], и произведем классификацию колебаний этом молекулы. После вычисления характеров приводимых представлений в пространстве 3N и 3N-6 координат, необходимо произвести разложение их на неприводимые представления при помощи формулы
n (j) =1/g S hi c (R) c (j) (R).
Таблица 5
Таблица характеров неприводимых представлений группы C3v и классификация колебаний молекулы
| C3V | E | 2C3 | 3sv | n` | tr | libr | n |
|
| A1 | 1 | 1 | 1 | 4 | 1 | 0 | 3 | Tz |
| A2 | 1 | 1 | -1 | 1 | 0 | 1 | 0 | Rz |
| E | 2 | -1 | 0 | 5 | 1 | 1 | 3 | TxTy; RxRy |
| Угол j | 0 | 2p/3 | 0 |
| ||||
| Число атомов UR | 5 | 2 | 3 | |||||
| c (R) =±1+2cosj | 3 | 0 | 1 | |||||
| c3N=UR (±1+2cosj) | 15 | 0 | 3 | |||||
| c (tr) =±1+2cosj | 3 | 0 | 3 | |||||
| c (l) =1±2cosj | 3 | 0 | -1 | |||||
| c3N-6 | 9 | 0 | 3 | |||||
Можно было бы выяснить, что для системы координат, когда ось Z направлена вдоль C3, координата z преобразуется по представлению А1, координаты x и y смешанные, ибо преобразуются по представлению E. Аналогично lz относится к представлению A2, а ly и lx к представлению E. Все эти данные обычно помещаются в таблицу характеров группы (см. Вильсон, Дешиус, Кросс; Герцберг и др.).
Обозначение типов симметрии (неприводимых представлений)Обычно принято одномерное представление обозначать А или В, двумерное - Е, трехмерное - F. Буквы А и B употребляются для того, чтобы различать одномерные типы симметричные относительно Cn (в группах Dn). Цифры 1 и 2 внизу означают симметричные и антисимметричные типы по отношению к оси C2или sv в группах Dn. В группах, где имеется центр инверсии I, выделяются представления симметричные и антисимметричные относительно центра инверсии I - значки u и g соответственно. Симметрия и антисимметрия относительно плоскости sv обозначается одним или двумя штрихами.
Похожие работы
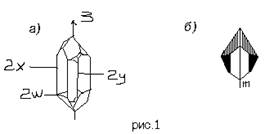
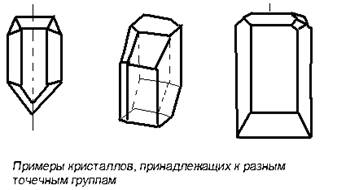
... , а затем и более фундаментального, одновременно и самого абстрактного (динамического) понимания симметрии. 2. 2.2.Симметрия кристаллов. Правильную, симметричную форму кристаллов издавна объясняли симметричным расположением атомов. Само существование атомов было еще гипотезой, но внешнее проявление стройного порядка заставляло предполагать внутреннюю причину. Быть может, правильные пирамиды, ...
... уже автоматически =====. Знание автоморфизма нормального делителя и элементов групп H и F определяет полупрямое произведение, т. е. факторизацию группы. Глава 2 Введение в теорию представлений групп симметрии молекул 2.1 Векторные (линейные) пространства 1. Модуль и векторное пространство Определение 1. Кольцом называется множество K, в котором определены операции сложения и ...
... ), и ее вклад в теплоемкость равен 1. Вращательная теплоемкость многоатомных газов. Свободную энергию многоатомного газа, как и двухатомного, можно представить в виде суммы трех частей — поступательной, вращательной и колебательной. Поступательная часть характеризуется теплоемкостью и химической постоянной, равными: Благодаря большой величине моментов инерции многоатомных молекул (и ...

... строгое следствие однородности времени, а закон сохранения импульса (количества движения) следует из однородности пространства. Это же относится и ко всем остальным симметриям. СПОНТАННОЕ НАРУШЕНИЕ СИММЕТРИИ Большинство симметрии возникает при некоторой идеализации задачи. Учет влияния более сложных взаимодействий приводит к нарушению симметрии. Например, независимость энергии ато ...
0 комментариев