Навигация
ОЦЕНКА ПРЯМЫХ ПОКАЗАТЕЛЕЙ КАЧЕСТВА
9284
знака
16
таблиц
18
изображений
2. ОЦЕНКА ПРЯМЫХ ПОКАЗАТЕЛЕЙ КАЧЕСТВА
2.1. Определение прямых показателей качества по переходной характеристике (время регулирования tpи перерегулирование
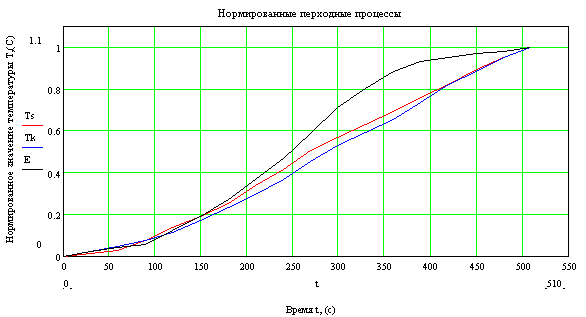
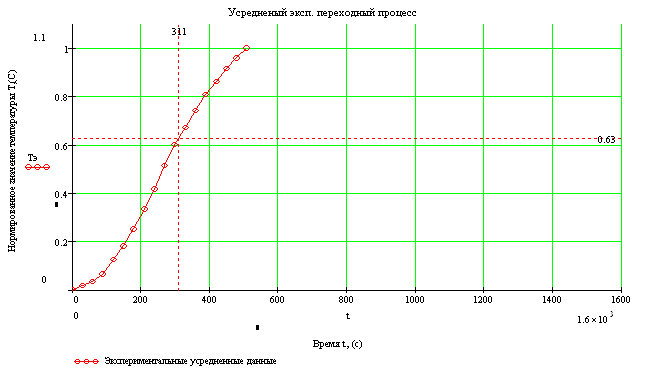
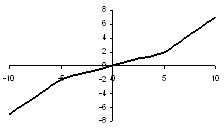
Характеристики переходного процесса определяются параметрами системы, видом задающего и возмущающего воздействий начальными условиями. Истинные значения прямых показателей качества получают по переходной характеристике. Получим график переходной характеристике при помощи программы VisSim.
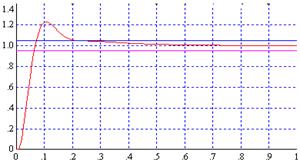
Рисунок 3- График переходной характеристике.
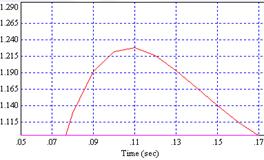
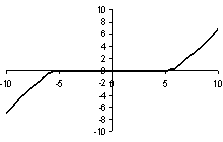
Рисунок 4 -Т max
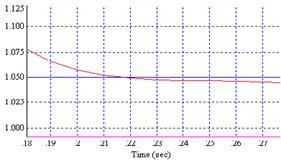
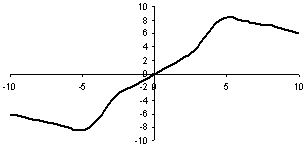
Рисунок 5- График пересечения.
Время регулирования – это промежуток времени по истечению, которого отклонения регулируемой величины от установившегося значения становится меньше некоторой заранее заданной величины,
![]() то есть время регулирования характеризует время затухания переходного процесса tp=0,217 секунд.
то есть время регулирования характеризует время затухания переходного процесса tp=0,217 секунд.
Перерегулирование - это выраженное в процентах отношение максимального отклонения управляемой величины от установившегося значения к установившемуся значению![]() =>
=> ![]() (значение не должно превышать 30%).
(значение не должно превышать 30%).
Характеристическое уравнение замкнутой системы.
![]()
Уравнение имеет четыре корня, и они равны:
P1 =-31.952, 148.622; P2 =-148.622, 31.952; P3 =-21.42; P4=-5.158
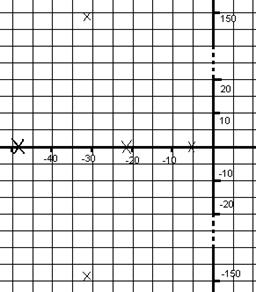
Рисунок 6 - Оценка прямых показателей качества.
Из расположения корней видно то что перерегулирования и время регулирования имеют большие значения, все корни расположены на отрицательной части вещественной оси следовательно система апериодически устойчива.
2.2.2 Оценка прямых показателей качества системы по ВЧХ.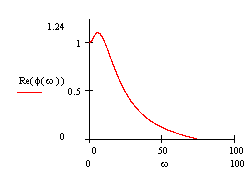
Рисунок 7- Оценка прямых показателей качества системы по ВЧХ.
2.3 Определение показателя колебательности системы (по АЧХ замкнутой системы и АФЧХ разомкнутой системы).
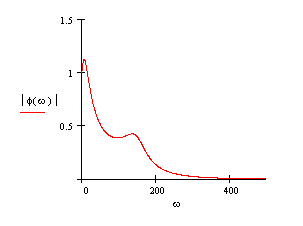
Рисунок 8 - АЧХ.
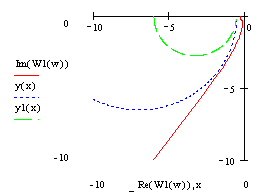
Рисунок 9 - АФЧХ разомкнутой системы
3. Определение ошибки системы. 3.1. Определить ошибку системы в установившемся режиме. Получение расчетного и экспериментального графика ошибки системы при отработки входного сигнала с постоянной скоростью.
![]()
![]()
![]()
E=C0 *(ax + b)= 15x+1.7
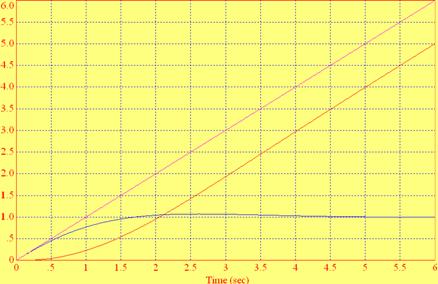
Рисунок 10 – расчетно эксперементальный график ошибки системы
3.2. Расчет и посторенние графика реакции системы при подаче на вход гармонического входного сигнала с заданной амплитудой и частотой A0=15; ω=1.7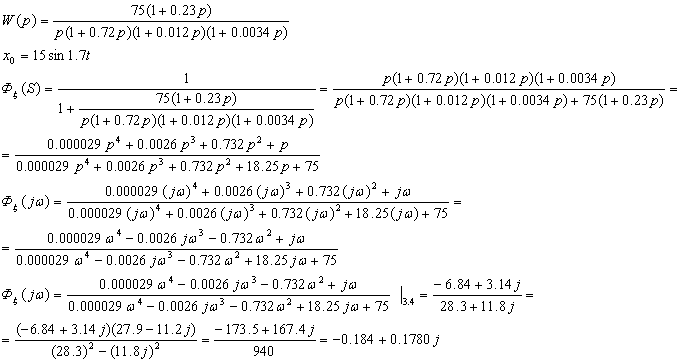
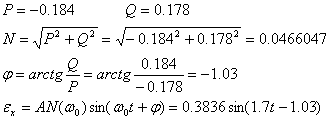
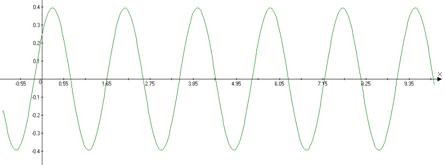
Рисунок 11 – График реакции системы.
Заключение
В результатеgвыполненной работыgследует сделать вывод о том, что система имеет хороший запас устойчивости. Исследуя систему по корням характеристического уравнения, можноgсказать что, разомкнутая система находится на границе устойчивости, так как имеется oдин нулевой корень. Полученные показатели качества позволяют сделать заключение o тoм, что система плавноgи последовательно возвращается в установившееся значение. Из графика видно, что переходный процесс колебательный.
По критериям Гурвица, Михайлова и Найквиста система является устойчивой.
Система работоспособна, с довольно значительной колебательностью и малой полосойgпропускания.
Список использованной литературы
1. Бесекерский В. А., Попов Е. П. Теория система автоматического регулирования. – М.: Наука, 1975.
2. Макаров И.М., Менский Б.М. Линейные автоматические системы (элементы теории, методы расчета и справочный материал). - 2-е изд., перераб. и доп. - М.: Машиностроение, 1982.
3. Cборник задач по теoрии автоматического регулирования и управления / Под ред. В.А. Бесекерского. - М.: Наука, 1978.
4. Теория автоматическогоoуправления.: Учебник. В 2-х частях/ Под ред. А. А. Воронова. – М.: Высшая школа, 1986.
Похожие работы



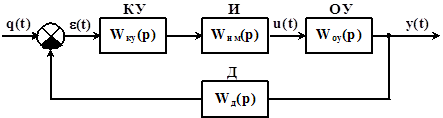
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
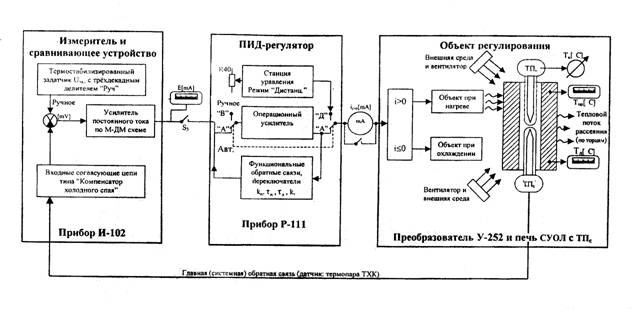
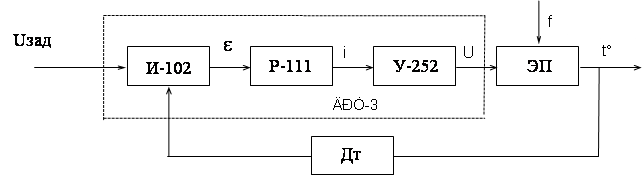
... и науки Украины Севастопольский национальный технический университет Кафедра технической кибернетики КУРСОВОЙ ПРОЕКТ по дисциплине «Системы автоматики» на тему: «Разработка и исследование системы автоматического регулирования температуры электропечи на базе промышленного регулятора Р-111» (пояснительная записка) Выполнил: ст. гр. А-41з Брусинов С.Э. Проверил: профессор ...
... первый взгляд кажутся монотонными). Как показал анализ эта немонотонность обусловлена способом дефаззификации. Таким образом, целесообразно при построении нечётких систем управления пользоваться не только знаниями эксперта, но также базовыми понятиями теории автоматического управления. Дать общие рекомендации относительно выбора того или иного базиса не представляется возможным – все зависит от ...
... . Таким образом, необходимость автоматизации технологических процессов очевидна и есть необходимость научиться рассчитывать параметры систем автоматического управления (САУ), для последующего применения своих знаний на практике. В курсовой работе произведен анализ динамических свойств заданной структурной схемы САУ с составлением и анализом математических моделей объектов управления. 2. Анализ ...
0 комментариев