Навигация
Cyclone-SCAN - управление сканером
30885
знаков
1
таблица
9
изображений
1.3.1 Cyclone-SCAN - управление сканером
Cyclone-SCAN - это модуль для управления работой сканера Leica ScanStation 2. Пользователь может настраивать плотность сканирования, фильтрацию данных, создавать собственные макрокоманды, сканировать и автоматически распознавать плоские и сферические визирные цели Leica Geosystems HDS. При всем функциональном богатстве работать с Cyclone-SCAN очень легко из-за простого и понятного интерфейса.
Функциональные возможности Cyclone-Scan:
- Пространственное перемещение, масштабирование, разворот в режиме реального времени, изменение цвета точек по материалам цифровой фотографии или по другим условиям для точек, поверхностей и смоделированных тел.
- Трехмерная визуализация во время сканирования
- Регулирование уровня детализации облаков точек и трехмерных моделей для ускорения визуализации.
- Настройки для быстрой переотрисовки облаков точек в сетях треугольников (TIN)
- Прореживание облаков точек (каждая n-ная точка)
- Визуализация облаков точек по значению интенсивности или по цвету
- Ограничение объема визуализируемых точек по выбранному региону или срезу для быстрого черчения
- Предварительная установка среднего расстояния до объекта по единичному направленному измерению
- Автоматическое создание цифровой мозаики для панорамного снимка
- Панорамный просмотр для цифрового изображения
- Геодезическая привязка по пунктам известного геодезического обоснования
- Установка высоты инструмента перед сканированием
- Установка высоты визирной цели
- Функция Установи-и-сканируй (Point-and-scan) QuickScan™ для интерактивной установки горизонтального окна съемки
- Фильтрация для возможного исключения «лишних» данных:
a) Ограничение области сканирования по прямоугольнику или произвольному многоугольнику
b) Ограничение диапазона по дальности
c) Ограничение по интенсивности отраженного сигнала
d) Все предварительные установки настройки сканирования могут быть записаны и вызваны в любой момент. Есть готовый список стандартных установок сканирования
e) Настройка качества проверки совмещения
- Измерения расстояний, площадей и объемов по отдельным точкам и по готовым моделям:
a) Наклонные расстояния
b) Расстояния DX, DY, DZ
c) Создание и редактирование подписей
d) Создание и управление слоями
e) Назначение цветов и материалов объектам
f) Просмотр с позиции сканера и указание его местоположения
g) Искусственная настройка подсветки точек и моделей
h) Сохранение/вызов текущих сцен
i) Сохранение сцены в качестве файла с изображением (screen-shot)
j) Автоматизация при сканировании визирных марок HDS
- Входные форматы:
a) ASCII (XYZ, SVY, PTS, PTX, TXT)
b) Cyclone Object Exchange (COE) (COE Data Transfer Products)
c) BMP, JPEG, TIFF
- Выходные форматы:
a) ASCII (XYZ, SVY, PTS, PTX, TXT)
b) BMP, JPEG, TIFF
c) Cyclone Object Exchange (COE) format (COE Data Transfer Products)
1.3.2 Cyclone-REGISTER - уравнивание облаков точек
В Cyclone-REGISTER есть все функции для быстрого и точного уравнивания облаков точек, сделанных с различных точек съемки. Cyclone-REGISTER автоматически распознает стандартные визирные марки Leica Geosystems HDS, а также связывает сканы по характерным связующим точкам без визирных марок. Это дает возможность оптимального распределения количества точек стояния и визирных марок и экономит время работы в поле и в офисе.
В Cyclone-Register есть две технологии уранивания облаков точек:
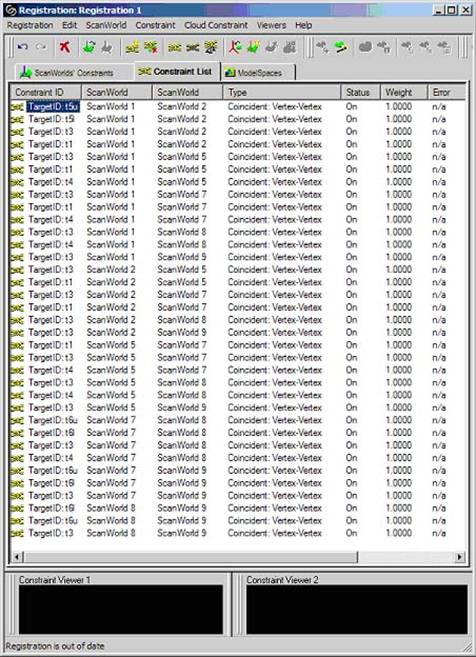
Рис. 3 Список точек привязки между сканами
Первая - уравнивание с помощью сканирования и распознавания специальных визирных марок HDS (рис.3). Марки могут быть как квадратными, так и круглыми, приклеивающимися, с магнитным основанием, устанавливаемыми на штатив, сдвоенные на одной вехе - для удобного определения системы координат, с устанавливаемой призмой - для наилучшего взаимодействия с тахеометрическими измерениями. Все они сделаны таким образом, чтобы их можно было просто найти при полевых съемках и однозначно дешифрировать на сканах. Облака точек можно уравнивать в локальную или государственную систему координат с использованием результатов измерений тахеометром на те же визирные марки. Удобный интерфейс уравнивания позволяет отключать или подключать отдельные точки, устанавливать веса, анализировать ошибки - все это служит оптимальному уравниванию.
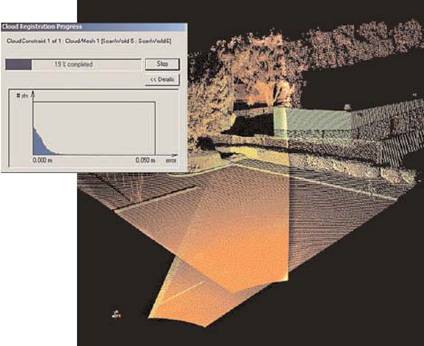
Рис. 4 Пример «сшивки» сканов по общим точкам
Вторая технология - поиск связующих точек по общим характерным контурам, отображенным в местах перекрытия отдельных сканов (рис.4). Эта технология называется построение связующих по облаку точек (Cloud Constraints). Она позволяет уравнивать облака точек без использования визирных марок. На двух сканах выбираются минимум три общих контурных точки. Программа выделяет некоторую область вокруг этих точек и уравнивает общее геометрическое построение как совокупность всех точек. Оценить результат такого уравнивания можно дважды - по цифровому отчету и по визуальному сравнению наложения двух облаков. В результате появляется новая связь, которая уравнивается также как результаты измерения визирных марок. Подобная технология уменьшает время выполнения съемки в поле и позволяет использовать процесс лазерного сканирования более гибко.
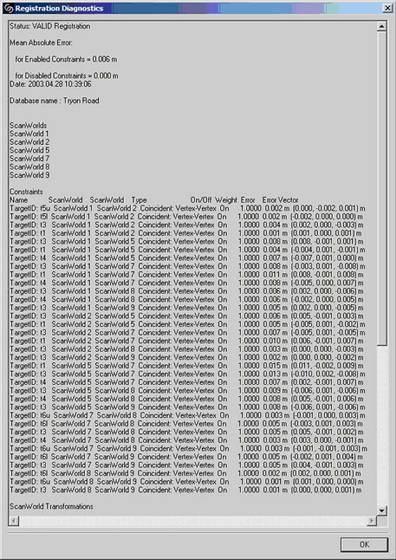
Рис. 5 Отчет с диагностикой результата уравнивания
После каждого уравнивания можно получить детализированный отчет с диагностикой результата уравнивания (рис.5). В статистический отчет включено все полученные ошибки по каждому отдельному элементу уравнивания, по каждому отдельному облаку точек можно узнать общую среднеквадратическую ошибку преобразования координат и углы разворота.
Модульная концепция Cyclone способствует более гибкому подходу для создания оптимального рабочего процесса для любых индивидуальных требований клиента. Cyclone-REGISTER позволяет быстро и надежно уравнять сканы, сделанные с различных позиций, в единую систему координат. Cyclone-MODEL - следующий модуль, предназначенный для обработки облака точек - создание чертежей, трехмерных моделей, измерения, анализа данных, записи отдельных изображений и целых видеофильмов и многое другое.
1.3.3 Cyclone-MODEL - измерения, моделирование и чертежиЭтот модуль дает возможность обрабатывать облака точек, превращая их в объекты для экспорта и импорта в программы САПР, такие как AutoCAD, Microstation, 3ds max. Cyclone-MODEL - это самая мощная в области обработки трехмерных лазерных измерений, наиболее полная и автоматизированная программа, состоящая из средств измерения, моделирования геометрических объектов для инженерных изысканий, геодезии, архитектуры, строительства и многого другого.
Cyclone™ - это мощная программа с большим набором функций для обработки данных лазерного сканирования, полученных с помощью сканеров серии HDS™. Cyclone предназначен для геодезистов и инженеров для быстрой и точной визуализации, управления, измерения и моделирования трехмерных объектов и сцен. Построенный на базе уникальной объектно-ориентированной архитектуры базы данных типа клиент-сервер, Cyclone является высокопроизводительной платформой для обработки данных лазерного сканирования с максимальной скоростью и точностью.
Управление Уровнем Детализации графического отображения объектов и распределенным обращением к оперативной памяти компьютера – в Cyclone заложена система управления Уровнем Детализации (Level of Detail - LOD) отображаемой графической информации, с помощью которой можно добиться компромисса между быстродействием компьютера и объемом отображаемой информации. Настройки детализации отображения могут быть применены к любым типам объектов (облако точек, цилиндры, поверхности и т.д.). Это очень важная функция особенно при обработке очень больших и сложно структурированных проектов. При отображении удаленных объектов Cyclone генерирует меньше деталей, только для создания визуально-точной картинки. Это дает большой выигрыш в скорости отображения и лучшем использовании оперативной памяти компьютера. Уровень Детализации может быть применен при отображении отдельных сканов, интеллектуального уменьшения количества точек в местах наложения сканов.
Пространственная навигация с использованием трехмерного ограничителя (Limit Box) – данные проекта могут быть поделены на отдельные квадратные или кубические ограничители. Менеджер Limit Box дает возможность быстрой навигации по отдельным частям большой базы данных.
Быстрое Автоматизированное моделирование трехмерных объектов – уникальные и мощные средства Cyclone – определение рядом стоящих точек (region growing) (рис.6) дают возможность быстро и точно создавать трехмерные модели из облаков точек. Функция работает следующим образом: выбирается одна или несколько точек, затем с помощью алгоритма наилучшего размещения Cyclone автоматически находит соседние точки, удовлетворяющие условию построения соответствующей фигуры. И алгоритм работает до тех пор, пока вновь найденные точки не будут удовлетворять условию построения фигуры. Таким образом, можно построить цилиндры (трубы), плоскости, сглаженные поверхности. Алгоритм основан на методе наименьших квадратов и все статистические данные (среднеквадратическое отклонение, среднее и максимальное отклонение от среднего и т.д.) показывают надежность построения модели.
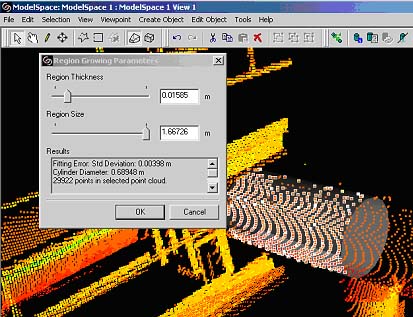
Рис. 6 Пример определения рядом стоящих точек
Корректировка по Таблицам и Интеллектуальное Моделирование Труб – все вновь создаваемые трехмерные модели труб и металлоконструкций можно корректировать в автоматическом режиме по встроенному каталогу стандартных размеров (например, по ГОСТу) (рис.7). Режим Моделирования Труб позволяет помимо построения трехмерной модели добавлять информацию о спецификации труб, идентификаторах линий, толщине труб и изоляции и соответствующие Символьные ключи.
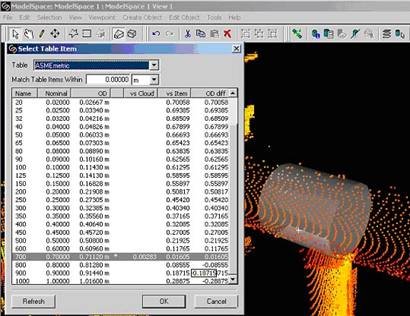
Рис. 7 Каталог стандартных размеров
Виртуальный Топограф (Virtual Surveyor™) для быстрой топосъемки – простая в обучении функция Виртуального Топографа эмулирует процесс накопления полевых данных традиционными геодезическими приборами. Все данные могут быть экспортированы в настраиваемом текстовом формате ASCII для передачи в стандартные программы обработки геодезических данных. Тем самым, можно сказать, осуществляется мечта геодезистов и топографов – получать информацию не выходя из офиса.
Точные топографические модели, Вычисления отклонений от поверхности – в Cyclone есть мощные средства поддержки комплексных топографических моделей с возможностью сглаживания нерегулярных сетей треугольников поверхности, что позволяет уменьшать объемы данных при сохранении точной геометрии. Достаточно легко, непосредственно из облака точек создаются сечения вдоль ломанной или сплайн-линии, а также линии равных высот (изолинии).
Средства измерения отклонений от поверхности дают возможность вычислять объемы перемещаемого грунта для выемки и насыпей. Объемы вычисляются по существующим или предполагаемым поверхностям. Результат вычислений включает объем, контуры, таблицы с разницами высот, определенные через устанавливаемый пользователем интервал. Изменение интервала вычислений позволяет настраивать точность получаемого результата.
1.3.4 Leica Cyclone - VIEWER и VIEWER PRO – измерения и визуализация объектовCyclone-VIEWER Pro это программа предназначена только для визуализации и измерений. Все функции визуализации и измерений по данным трехмерного лазерного сканирования без необходимости иметь полную лицензию Cyclone. Это возможность распространять базы данных Cyclone пользователям, не имеющим программного модуля Cyclone-MODEL.
Cyclone-VIEWER Pro предоставляет все функции визуализации: вращение, увеличение, навигация, измерения, создание собственных слоев, двумерное черчение по плоскости, а также аннотации и средства импорта и экспорта данных в/из Cyclone, включая облако точек и трехмерные модели.
Cyclone-VIEWER - это версия программы Cyclone, предназначенная только для просмотра баз данных формата '*.imp'. VIEWER - программа, которую можно устанавливать на любой компьютер без лицензии. Это очень хороший способ передавать материалы заказчику или для рекламы без прав изменений и экспорта данных. При просмотре можно видеть, увеличивать и вращать облака точек, модели объектов, промеры, профили и др.
1.3.5 Leica COE (Cyclone Object Exchange) - обмен даннымиЭффективное решение для двунаправленного обмена данными. Cyclone™ Object Exchange (COE) Data Transfer – это программная утилита для обмена данными между Cyclone и AutoCAD (2000 или более новый) и MicroStation.
1.3.6 Cyclone CloudWorx для AutoCAD
Программа, позволяющая получить огромные преимущества при обработке 3D облаков точек в широко распространенной среде САПР
Пользователи AutoCAD могут работать с большей эффективностью, обрабатывать большие 3D облака точек непосредственно в среде AutoCAD с использованием средств и команд, работающих в этой программе. Cyclone CloudWorx добавляет простые функции для визуализации и работы с разрезами облаков точек для ускорения создания двумерных чертежей. Мощные функции автоматического моделирования позволяют создавать модели труб из облака точек в среде AutoCAD.
2. Возможности сканирующей системы
Лазерный сканер Leica Scan Station 2 позволяет проводить высокоточные измерения объектов любой сложности (с погрешностью до 2 мм) за минимальное время, на выходе получаем данные в виде «облаков точек» или другими словами трехмерную модель объекта в виде «облаков точек», что значительно облегчает работу по созданию обмерных чертежей и планов.
2.1 Основы технологии лазерного сканированияВ основе технологии трехмерного лазерного сканирования лежит метод определения множества трехмерных координат X, Y, Z отдельных точек на снимаемом объекте. Измерения выполняются с помощью высокоскоростного лазерного дальномера. Для перехода на следующий узел мнимой сетки луч лазерного дальномера после каждого замера разворачивается системой зеркал на некоторый заданный угол. Повышение плотности узлов в этой сетке увеличивает количество снятых точек и детализирует съемку.
Дальномер имеет высокую скорость измерений - от нескольких сотен до десятков тысяч операций в секунду. Координаты точек, полученные в результате сканирования объекта, объединяются в большие группы точек (от сотен до миллионов), называемые на практике облаками точек.
Самые распространенные сегодня модели лазерных сканеров используют импульсный лазерный дальномер. Отклонение лазерного луча в вертикальном направлении осуществляется шаговым электромотором с закрепленным на нем зеркалом. В горизонтальном направлении луч лазера отклоняется путем вращения самого сканера (рис.8). Такая схема позволяет охватить все окружающее сканер пространство. Например, в лазерном сканере Leica Scan Station поле зрения составляет 3600 по горизонтали и 2700 по вертикали (рис.9). Угловая точность шаговых электромоторов, управляющих вращением сканера и зеркала, наряду с точностью лазерного безотражательного дальномера, являются важной составляющей точности получаемых координат точек.
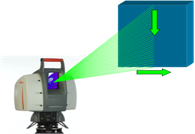
Рис. 8 Принцип действия лазерного сканера

Рис. 9 Дизайн двух окон
Определив дальномером расстояние и зная угол отклонения лазерного луча в горизонтальной и вертикальной плоскостях, можно получить трехмерные координаты каждой точки. Они будут находиться в системе координат сканера.
С помощью дополнительных операций и специализированного программного обеспечения можно будет привязать полученное облако точек к любой требуемой системе координат.
Многие модели наземных лазерных сканеров обладают встроенной цифровой фотокамерой.
С ее помощью можно выполнить фотосъемку окружения прибора. Получив панорамную фотографию объекта, пользователь сможет взять из нее только то, что требуется, избежав сканирования лишних фрагментов и, следовательно, потерь рабочего времени.
Как и в любой современной технологии, важную роль в этой играет компьютер. Он служит управляющим и запоминающим устройством для лазерного сканера. Подключившись к нему с помощью кабеля, мы можем выбирать на экране область сканирования, задавать нужную плотность съемки, производить фотосъемку объекта, задавать координаты точки стояния сканера, отслеживать текущее состояние процесса сканирования, управлять сохранением результатов.
Технология съемки с применением лазерного сканера зависит от геометрии и типа снимаемого объекта. Для достижения результата иногда приходится многократно переставлять сканер с точки на точку, выполняя съемку отдельных деталей и фрагментов. Причина - наличие мертвых зон , возникающих из-за различных обстоятельств. Поэтому нередко возникает необходимость привести отснятый материал к единой системе координат. Для этого во время съемки на объекте или рядом с ним устанавливаются марки, с помощью которых производится объединение облаков точек , полученных с различных точек сканирования. Для пространственной трансформации облаков требуется, как минимум, три марки на каждую точку установки сканера. Эти три точки с марками должны быть видны со смежных точек. Сам процесс объединения облаков точек выполняется в специализированном программном обеспечении.
Сканирование не является конечной целью работы, это лишь один из методов достижения необходимого результата. Здесь важно заранее определить, нужна ли трехмерная модель объекта или же достаточно составления чертежа - от этого будет зависеть плотность получаемых точек и, как следствие, время на сканирование. При необходимости детального описания объекта мы получаем большой массив данных в виде облаков точек (рис.10).
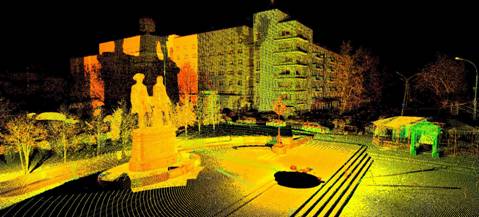
Рис. 10 Пример облака точек
Следующий этап работы - выделение из полученного набора данных той информации, на основании интерпретации которой мы придем к конечному результату. Это может быть, допустим, разрез объекта в нужной плоскости или его трехмерная модель с использованием набора графических элементов. На экране достаточно просто измерить расстояние там, куда невозможно отправить человека с рулеткой, а также составить чертеж по результатам сканирования. В рамках специального программного обеспечения можно создавать анимацию с облетом полученных облаков точек трехмерной модели. При этом необходимо учитывать, что огромные массивы данных, состоящих из десятков миллионов точек, занимающие гигабайты на накопителях, предъявляют повышенные требования к быстродействию компьютеров и емкости накопителей информации.
2.2 Принцип работы сканирующей системыВ большинстве конструкций сканеров используется импульсный лазерный дальномер. На пути к объекту импульсы лазерного излучения проходят через систему зеркал, которые осуществляют пошаговое отклонение лазерного луча. Наиболее распространенной является конструкция, состоящая из двух подвижных зеркал. Одно из них отвечает за вертикальное смещение луча, другое – за горизонтальное. Зеркала сканера управляются прецизионными сервомоторами, в конечном итоге, они и обеспечивают точность направления луча лазера на снимаемый объект. Зная угол разворота зеркал в момент наблюдения и измеренное расстояние, процессор вычисляет координаты каждой точки.
Все управление работой прибора осуществляется с помощью портативного компьютера со специальными программами. Полученные значения координат точек из сканера передаются в компьютер по интерфейсному кабелю и накапливаются в специальной базе данных. Сканер имеет определенную область обзора или, другими словами, поле зрения.
Предварительное наведение сканера на исследуемые объекты происходит либо с помощью встроенной цифровой фотокамеры, либо по результатам предварительного разряженного сканирования. Изображение, получаемое цифровой камерой, передается на экран компьютера, и оператор осуществляет визуальный контроль ориентирования прибора. Сканирование может производиться как сразу всего поля зрения, так и лишь какой-то его части. Поэтому фотоизображение может быть использовано для выделения из общей картины нужных локальных областей.
Работа по сканированию часто происходить в несколько сеансов, во-первых, из-за ограниченного поля зрения, во-вторых, из-за формы объектов, когда все поверхности просто не видны с одной точки наблюдения. Самый простой пример - четыре стены здания. Полученные с каждой точки стояния сканы совмещаются в единое пространство в специальном программном модуле. Для обеспечения процесса совмещения еще на стадии полевых работ необходимо предусмотреть получение сканов с зонами взаимного перекрытия. При этом перед началом сканирования в этих зонах нужно разместить специальные мишени. Это является весьма существенным моментом при планировании работ. По координатам этих мишеней и будет происходить процесс "сшивки". Можно совместить облака точек без специальных мишеней, используя лишь характерные точки снимаемого объекта, которые должны легко опознаваться на сканах, но при этом, чаще всего, неизбежны потери точности.
2.3 Задачи, решаемые с помощью лазерного сканированияОдной из областей, наиболее ярко открывающих возможности лазерного сканера, является архитектура. Сканирование незаменимо для решения задач сохранения памятников и предметов исторической ценности. Конечно, помимо лазерного сканирования существуют и другие методы сохранения изображений, например, фотография или ее частный случай - стереофото. Однако фотография не содержит трехмерных координат. Стереофотография, сохраняющая объемность изображения, больше всего подходит для визуального восприятия объекта, однако извлечение данных о координатах большого количества точек из стереопары фотографий сопряжено со значительными трудозатратами. Метод же лазерного сканирования дает нам возможность очень быстро провести съемку фасада здания и получить модель исторического объекта с деталями размером до нескольких миллиметров.
Другой пример применения лазерного сканирования - съемка сложных в техническом отношении объектов, особенно, если они давно эксплуатировались, неоднократно подвергались перестройке, но это не всегда оперативно отражалось в документации. Бывает, что чертежи некоторых узлов объекта утеряны. Бывает, что оборудование подлежит модернизации, однако непонятно, поместится ли новая техника на площадях старой. В этих ситуациях эффективно трехмерное лазерное сканирование. Именно оно позволит ответить на все вопросы. Смоделировав реальную ситуацию на компьютере, можно быть уверенным в успехе будущей модернизации. Например, мы можем импортировать в программу обработки модель нового оборудования, совместить ее с облаками точек и увидеть все проблемные участки планируемой модернизации. По сути дела, еще на этапе проектирования можно будет сделать вывод о том, насколько успешно завершится модернизация. Еще одной областью использования наземного лазерного сканирования является съемка карьеров и открытых горных выработок. Оперативный подсчет объемов грунта - важная задача для горнодобывающих предприятий. Она также успешно решается путем применения лазерного сканирования.
Заключение
В заключение хотелось бы отметить несколько преимуществ данной технологии наземного лазерного сканирования:
1. мгновенная трехмерная визуализация
2. высокая точность
3. несравнимо более полные результаты
4. быстрый сбор данных
5. обеспечение безопасности при съемке труднодоступных и опасных объектов
Материальные затраты по сбору данных и моделированию объекта методами трехмерного наземного лазерного сканирования на небольших участках и объектах сопоставимы с традиционными методами съемки, а на участках большой площади или протяженности - ниже. Даже при сопоставимых расходах на съемку, полнота и точность результатов наземного лазерного сканирования позволяют избежать дополнительных расходов на этапах проектирования, строительства и эксплуатации объекта. Сравнение временных затрат просто бессмысленно - счет идет на порядки.
Список используемой литературы
1. ЗАО Научно – Производственное Предприятие НАВГЕОКОМ Лазерное сканирование // методическое пособие 2006.
2. Компания Leica Geosystem // www.leica-geosystems.com
3. ЗАО «Проектно – изыскательский Институт ГЕО» // www.pgeo.ru
4. Рабочая инструкция по проведению съемочных работ с использованием наземной лазерной сканирующей системы.
5. Трехмерный лазерный сканер: принцип работы и область применения // научная статья, Издательство Стандарты и качество // www.stq.ru
Похожие работы





... пользователь от этого слияния только выиграл - пополнение модельного ряда принтеров этикеток офисного и коммерческого классов с тенденцией перевода принтеров на язык программирования Zebra снимает вопросы совместимости уже разработанного программного обеспечения предприятия, изначально ориентированного на продукцию фирмы Zebra. Разумеется, усовершенствования коснулись и высокопроизводительных ...
... свет для освещения объекта и специальный приемник. Однако голографическая фототелеграфная система может быть изготовлена при существующем состоянии техники. Устройства отображения информации на лазерных генераторах света. Применительно к индикаторным устройствам представляют интерес следующие свойства излучения лазеров: пространственная когерентность, временная когерентность, цвет и ...
... -ным законом распределения ширины щелей и стенок может быть представ-лен следующим выражением: (2.16). Наибольший интерес для практической реализации в оптических системах КОС для автоматизации контроля статистических характеристик пространственной структуры ЛЗ представляет второе слагаемое выражения (2.16), содержащее функциональную взаимосвязь этих характеристик. Пос-кольку это слагаемое ...

... влияющие на точность и воспроизводимость результатов. Области практического применения лазерной размерной обработки ограничены преимущественно получением отверстий не выше 3-го класса точности. Тем не менее, лазерная технология получения отверстий внедрена на ряде предприятий, где с ее помощью получают черновые отверстия (на проблемах внедрения этих процессов мы остановимся позднее). Относительно ...
0 комментариев