Возможности, визуализация и графические средства
Генераторный режим с отдачей энергии в сеть
Асинхронные двигатели с улучшенными пусковыми свойствами
Реакторный и автотрансформаторный пуск АД
Регулирование скорости изменением числа пар полюсов
МАТЕМАТИЧЕСКИЕ МОДЕЛИ АСИНХРОННОЙ МАШИНЫ
Математическая модель асинхронной машины в осях, вращающихся с произвольной скоростью
Преобразование уравнений асинхронной машины в неподвижной системе координат
Структурная схема модели в неподвижной системе координат и её поблочное описание
Результаты моделирования
Результаты моделирования
Объект исследования
Снятие динамической характеристики при параметрах короткого замыкания
Снятие искусственных механических характеристик
Снятие естественной механической характеристики
Определение затрат времени на разработку (ПМО) по стадиям проектирования
Расчет затрат на требующееся машинное время
Технические методы увеличения безопасности работы за компьютером
Навигация
Регулирование скорости изменением числа пар полюсов
Разработка виртуальной лабораторной работы на базе виртуальной асинхронной машины в среде MATLAB
114601
знак
5
таблиц
73
изображения
2.6.2 Регулирование скорости изменением числа пар полюсов
Так как скорость вращения вращающегося поля ω1 = 60f1/p, при постоянном значении частоты сети f1 зависит только от числа пар полюсов этого поля, то, изменяя его, можно изменить также и скорость вращения ротора двигателя. Этот способ дает возможность регулировать скорость вращения асинхронного двигателя без таких больших потерь мощности, как при реостатном способе, что достигается за счет усложнения и удорожания конструкции машины.
Ввиду того, что число пар полюсов р может быть только целым числом, при переключении числа пар полюсов изменение скорости будет происходить ступенчато. Такие двигатели часто называются многоскоростными.
Разместив на статоре две отдельные обмотки (одну на р пар полюсов, а другую на p1 пар полюсов) и включая их поочередно, можно получить две скорости вращения поля, а следовательно, и две скорости вращения ротора. Отношение скоростей будет обратно пропорционально отношению числа пар полюсов.
Ротор двигателя при этом должен иметь короткозамкнутую обмотку, для которой число полюсов создаваемого поля всегда равно числу полюсов вращающегося поля обмотки статора.
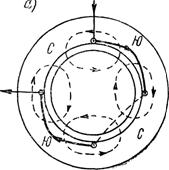
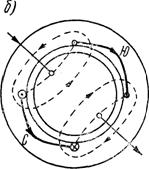
Рисунок 2.10 - Изменение числа пар полюсов асинхронного двигателя переключением цепей обмотки статора: а - при большем числе полюсов; б - при числе полюсов в 2 раза меньшем
Более простым и дешевым является способ, при котором на статоре укладывается одна обмотка, позволяющая производить изменение числа пар полюсов обмотки статора. Увеличение или уменьшение пар полюсов, например, вдвое может быть произведено сравнительно просто. Для этого каждая фаза обмотки статора делится на две одинаковые части - полуобмотки и в одной из них изменяется направление тока.
На рисунке 2.10 показаны схемы обмотки статора при изменении числа пар полюсов в отношении 2:1.
Следовательно, при переключении числа пар полюсов могут быть изменены характеристики обмотки и индукция в воздушном зазоре.
Различными способами переключения числа пар полюсов можно осуществить работу двигателя в двух режимах: 1) сохраняя постоянство вращающего момента и изменение мощности пропорционально скорости вращения (переключение обмотки со звезды на двойную звезду); 2) сохраняя примерное постоянство мощности и изменение вращающего момента обратно пропорционально скорости вращения (переключение обмотки с треугольника на двойную звезду).
Асинхронные двигатели с переключением числа пар полюсов изготовляют в основном как двухскоростные и реже (небольшой мощности) как трех- и четырехскоростные. Трех- и четырехскоростные двигатели выпускают с двумя обмотками на статоре, причем одну из них или обе выполняют с переключением числа пар полюсов.
К недостаткам многоскоростных двигателей следует отнести их увеличенные размеры по сравнению с нормальными асинхронными двигателями и более высокую стоимость.
2.6.3 Регулирование скорости изменением напряжения источника питания
Диапазон регулирования скорости не большой и снижается с уменьшением нагрузки, так как максимальный момент, развиваемый двигателем, зависит от квадрата напряжения источника питания. Так при уменьшении напряжения в 2 раза, максимальный момент уменьшится в 4 раза. Способ целесообразно применять для двигателей с повышенным скольжением (мягкой характеристикой) иначе диапазон регулирования будет незначительным. Серийно выпускаются тиристорные и транзисторные регуляторы напряжения.
2.7 Регулирование скорости АД с фазным ротором
Для АД с фазным ротором используются следующие способы регулирования скорости: реостатный, изменением питающего напряжения, и введением добавочной ЭДС в цепь ротора.
Схема регулирования скорости вращения асинхронных двигателей с фазным ротором при помощи реостата в цепи ротора не отличается от схемы пуска, изображенной на рисунке 2.7, а.
Как это было показано выше (см. рисунок 2.7, б), увеличение активного сопротивления в цепи ротора делает механическую характеристику более пологой, что приводит к увеличению скольжения, а следовательно, к уменьшению скорости вращения.
Этот способ дает возможность регулировать скорость вращения в широких пределах от номинальной до полной остановки. Плавность регулирования скорости будет зависеть от числа ступеней.
Однако такой способ регулирования скорости неэкономичен, так как он связан с большими непроизводительными потерями энергии в реостатах.
Однако, несмотря на неэкономичность этого способа регулирования скорости вращения асинхронного двигателя, он довольно часто применяется на практике, в основном для регулирования скорости вращения двигателей небольшой мощности и при кратковременной работе на малых скоростях.
Также регулирование скорости можно получить путём одновременного ввода добавочного сопротивления в цепь ротора и понижением напряжения источника питания. При таком способе необходимо учесть, что максимальный момент уменьшается пропорционально квадрату напряжения, а также механическая характеристика становится мягче.
Похожие работы
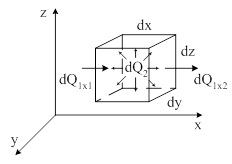
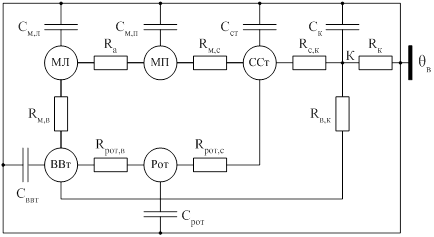
... тепловой схемы выполнялось для стационарного режима, так как коэффициенты теплоотдачи в переходном и стационарном режимах одинаковы. Полученные результаты используются в компьютерной лабораторной работе «Моделирование нагрева асинхронного двигателя в различных режимах работы». Лабораторная работа выполнена в программной среде MatLab 6.1, и в ее приложении Simulink 4. Данная работа позволяет ...
0 комментариев