Навигация
Конструювання шпиндельного вузла
7938
знаков
0
таблиц
1
изображение
4.2 Конструювання шпиндельного вузла
Шпиндельні вузли металорізальних верстатів проектуються в більшості випадків з підшипниками кочення в опорах. Використовують в опорах як кулькові, так і роликові підшипники. Підшипники опор повинні витримувати радіальне та осьове навантаження, що діють на шпиндель в процесі роботи верстата. Для протидії осьовому навантаженню упорні підшипники можна проектувати як в передній, так і в задній опорах. Використання радіально-упорних або упорних підшипників в передній опорі більш ефективне, тому що розвантажує шпиндель від осьових сил різання, але при цьому ускладнюється конструкція та розміри передньої опори.
Спеціальні роликові шпиндельні підшипники проектують в опорах шпинделів при максимальній частоті обертання 2000…2500 обертів за хвилину. Вкорочені циліндричні ролики підвищують допустиму швидкість обертання.
Передній кінець шпинделя повинен мати строго стандартизовані як форму, так і розміри.
4.3 Розрахунок радіальної жорсткості шпинделя, розвантаженого від згинного моменту
В процесі роботи металорізального верстата геометрична вісь шпинделя змінює своє положення внаслідок податливості опор від дії сил різання , згинних моментів та зсуву від поперечних сил. Фактичне положення геометричної осі шпинделя буде залежати від жорсткості шпиндельного вузла, яка може бути визначена за принципом суперпозиції.
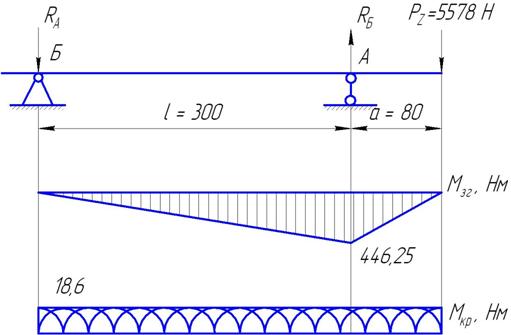
Розрахункова схема:
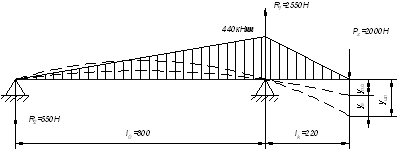
Реакції в опорах:
![]() ;
;
![]() ;
;
Пружне переміщення тіл кочення та кілець підшипників в передній опорі:
![]() .
.
Контактна деформація посадочних поверхонь підшипника і корпуса:
 .
.
Жорсткість передньої опори:
![]() .
.
Податливість передньої опори:
![]() .
.
Пружне зближення тіл кочення та кілець підшипників в задній опорі:
![]() .
.
Контактна деформація підшипників і корпуса задньої опори:

Жорсткість задньої опори:
![]() .
.
Податливість задньої опори:
![]() .
.
Переміщення переднього кінця шпинделя від згинних навантажень:
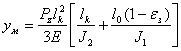 ,
,
![]() – момент інерції шпинделя між опорами;
– момент інерції шпинделя між опорами;
![]() – момент інерції консолі;
– момент інерції консолі;
![]() – коефіцієнт защемлення;
– коефіцієнт защемлення;
![]() .
.
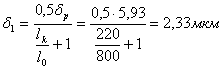
Переміщення переднього кінця шпинделя за рахунок податливості опор:

 .
.
Переміщення переднього кінця шпинделя від зсуву за рахунок поперечних сил:
![]() ,
,
де ![]() – модуль зсуву,
– модуль зсуву,
![]()
![]() – площа перерізу консолі шпинделя, мм2;
– площа перерізу консолі шпинделя, мм2;
![]()
![]() – площа перерізу шпинделя між опорами, мм2;
– площа перерізу шпинделя між опорами, мм2;
![]()
Радіальна жорсткість шпиндельного вузла:
![]() ,
,
![]() .
.
Радіальне переміщення шпинделя в точці заміру жорсткості:


4.4 Розрахунок осьової жорсткості шпинделя, розвантаженого від згинного моменту
Осьову жорсткість шпинделя розраховують за осьовою силою, що діє на шпиндель.
Приймаємо осьове навантаження від сил різання:
![]()
Пружне переміщення тіл кочення та кілець підшипника передньої опори:
![]()
де ![]() – кількість кульок підшипника;
– кількість кульок підшипника;
![]() – діаметр кульок.
– діаметр кульок.
Контактна деформація стиків задньої опори в місцях дотику:
![]() ,
,
![]()
де ![]() – діаметр корпусу в зоні дотику, мм;
– діаметр корпусу в зоні дотику, мм;
![]() – внутрішній діаметр підшипника, мм;
– внутрішній діаметр підшипника, мм;
![]() – коефіцієнт деформації дотику.
– коефіцієнт деформації дотику.
Осьова жорсткість шпиндельного вузла:
![]() .
.
Кут нахилу шпинделя в передній опорі:
![]() .
.
4.5 Розрахунок точності підшипників шпиндельного вузла
У зв’язку з тим, що шпиндельний вузол є визначальним за точністю металорізального верстата, виникає необхідність провести розрахунки точності підшипників в шпиндельних опорах. Пов’язані ці розрахунки з визначенням биття осі шпинделя в опорах.
Приймаємо коефіцієнт ![]() , для верстатів нормальної точності.
, для верстатів нормальної точності.
Биття переднього кінця шпинделя:
![]() ;
;
У зв’язку з тим, що при експлуатації верстата биття в підшипниках збільшується в розрахунках приймають:
![]() ;
;
Биття осі шпинделя в передній опорі:
 ;
;
Биття осі шпинделя в задній опорі:
![]()
Похожие работы
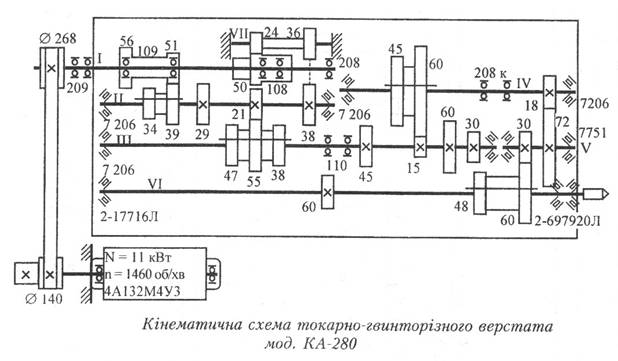
... сучасну машину або систему, відтворюючи відомі йому прототипи, але на більш високому науково-технічному рівні. 1. Базовий верстат і його головний привод За базовий верстат приймаємо універсальний токарно-гвинторізний верстат КА280, який є аналогом верстатів 1К62, 16К20, МК6056, 16Р25П. Верстат КА-280 нормального класу точності призначений для механічної обробки різноманітних деталей зі ...
0 комментариев