Навигация
Распределительная и управляющая пневмоаппаратура
45882
знака
2
таблицы
18
изображений
6. Распределительная и управляющая пневмоаппаратура
В пневмосистемах применяется распределительная и регулирующая аппаратура тех же типов и конструктивных исполнений, что и в гидросистемах, и лишь в отдельных случаях применяются дополнительные средства для повышения герметичности и обеспечения смазки. Так, например, повсеместно применяются распределительные и прочие регулирующие клапаны с дополнительными средствами герметизации в виде резиновых уплотнительных колец, а также клапаны с эластичными затворами.

Рис.12. Клапанный распределитель
Распределительные клапаны. Для распределения воздуха применяются двухпозиционные клапаны и золотники с плоскими распределительными элементами, которые обеспечивают высокую герметичность соединения.
![]() На рис. 12 приведена принципиальная схема клапанного распределителя для управления пневмоцилиндром одностороннего действия. Подвод сжатого воздуха производится к каналу b, а отвод отработавшего воздуха— через канал а. Рабочая полость силового цилиндра 1 соединена с каналом с. При повороте рычага 4 утапливается тот или иной клапан 2 или 5, в результате воздух или подводится в рабочую полость цилиндра 1, или отводится из него в атмосферу. Герметизация затворов клапанов осуществляется плоскими или резиновыми фторопластовыми кольцами 3, заделанными в металлические части затворов.
На рис. 12 приведена принципиальная схема клапанного распределителя для управления пневмоцилиндром одностороннего действия. Подвод сжатого воздуха производится к каналу b, а отвод отработавшего воздуха— через канал а. Рабочая полость силового цилиндра 1 соединена с каналом с. При повороте рычага 4 утапливается тот или иной клапан 2 или 5, в результате воздух или подводится в рабочую полость цилиндра 1, или отводится из него в атмосферу. Герметизация затворов клапанов осуществляется плоскими или резиновыми фторопластовыми кольцами 3, заделанными в металлические части затворов.
Клапан управляется вручную различными рычагами и толкателями, а также электромагнитами и сжатым воздухом, причем при отсутствии управляющего воздействия затвор клапана обычно перекрывает под воздействием пружины проход воздуха от подводящего к выходному отверстию.
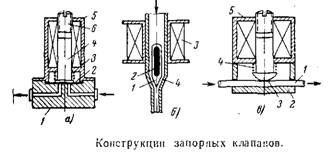
На рис. 16 представлены клапаны с ручным воздействием на толкатель 2, осуществляемым через рычаг 1 (рис. 13, а), и механическим воздействием на этот толкатель (рис. 13, б).

Рис.13. Клапаны с ручным воздействием на толкатель (рис. 13, а), и механическим воздействием на толкатель (рис. 13, б).
Сжатый воздух (давление до 6 кГ/см2) подводится к каналу b (рис. 13, а). В положении затвора клапана 4, показанном на рис. 13, а (толкатель 2 не нажат), он усилием пружины 5 и давления сжатого воздуха прижимается к седлу втулки 6 и герметично перекрывает с помощью резиновой прокладки 3 проход воздуху от входного отверстия b к отверстию а, которое сообщается через осевое сверление толкателя 2 с атмосферой. При утапливании (перемещении вправо) толкателя 2 он упирается сначала своим торцом в резиновую прокладку 3 затвора, отключая отверстие а от атмосферы, и при дальнейшем перемещении отрывает затвор клапана 4 от седла, открывая при этом проход сжатому воздуху от входного отверстия b в отверстие а пневмодвигателя.
На рис. 13, б показан клапан с пневматическим воздействием на толкатель 3 через поршень 2 пневмоцилиндра 1. Сжатый воздух подается в канал а.
В тех случаях, когда требуется обеспечить фиксирование затвора в обоих крайних его положениях, применяются различные механические средства. В клапане, представленном на рис. 14, б, это обеспечивается тем, что рычаг 1 воздействует на толкатель 4 через перемещающуюся в направляющих 2 косую шайбу 3, с помощью которой рычаг 1 фиксируется в обоих крайних своих положениях. Эта фиксация обеспечивается тем, что в обоих крайних положениях рычага 1 усилие реакции подпружиненной косой шайбы 3 стремится удержать его в этом положении.
7. Пневмоклапаны с электромагнитным управлением
В системах пневмоавтоматики широко применяются распределительные клапаны с электромагнитным управлением.
На рис. 14 приведена принципиальная схема пневмопривода с распределением плоскими клапанами с резиновыми затворами. Открытие (утапливание) клапанов 1 и 3 осуществляется электромагнитом 4 через рычаг 2 и закрытие — пружинами 7. При утапливании левого клапана 1 и освобождении правого клапана 3 левая полость пневмоцилиндра 6 соединяется с магистралью 5 питания сжатым воздухом, а правая — с атмосферой и наоборот. Применяются клапаны прямого действия и с серводействием (двухступенчатые клапаны).
На рис. 15, а приведена схема двухпозиционного клапанного распределителя (пневмокрана) с электромагнитным сервоприводом.
Запорный узел этого распределителя состоит из двух клапанов (затворов), один из которых 2, нагруженный пружиной 1, является собственно распределителем, а второй 3, связанный с якорем 6 электромагнита 5, — вспомогательным клапаном (клапаном-пилотом), управляющим основным клапаном 2.
При подаче напряжения на обмотку электромагнита 5 его якорь 6 переместится, преодолевая усилие пружины 7 вправо, в результате правый затвор вспомогательного клапана 3 сядет на седло 4, отойдя от седла 8, выполненного в основном клапане 2 (рис. 15, а). При этом воздух под давлением поступит в камеру с и, действуя на правый торец основного клапана 2, переместит его влево, соединив канал питания а с каналом потребителя b и перекрыв одновременно проход к каналу d, ведущему в атмосферу.
После обесточивания обмоток электромагнита 5 его якорь 6 под действием пружины 7 переместится влево, в результате связанный с ним затвор вспомогательного клапана 3 отойдет от седла 4 и соединит камеру с с атмосферой. Это позволит пружине 1 возвратить основной клапан 2 в исходное (правое) положение (рис. 15, б). При этом клапан 3 сядет на седло 8, перекрывая доступ воздуха из канала питания а в камеру с.

Рис. 14. Схема пневмопривода с распределением плоскими клапанами
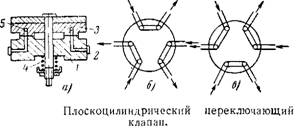
Распространены пневмораспределители с плоским распределительным элементом (золотником), которые выполняются с различным (ручным, пневматическим и электрическим) управлением. Конструктивно эти золотники подобны аналогичным золотникам гидросистем.
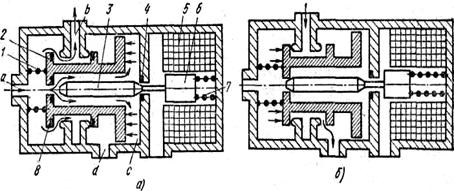
Рис. 15. На рис. 15, а приведена схема двухпозиционного клапанного распределителя; на рис. 15, б - с электромагнитным сервоприводом
Управление этими распределителями осуществляется, как правило, с помощью пневматических устройств или электромагнитов.
На рис. 16 показана принципиальная пневмосхема с электропневматическим распределителем в виде плоского золотника 9, приводимым связанным с ним дифференциальным плунжером 1 (диаметр D > d).
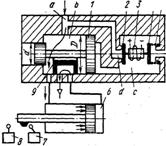
Рис. 16. Пневмосхема с распределителем в виде плоского золотника
Командными элементами в этой схеме являются концевые выключатели 7 и 8, на которые воздействуют упоры, установленные на штоке силового пневмоцилиндра 6. Исполнительным элементом является сердечник электромагнита 3, несущий управляющие пневмоклапаны 2 и 4, отжимаемые пружиной 5 в левое положение, в котором клапан 2 перекрывает канал d, соединенный с межпоршневой камерой b и вводным каналом а.
При втягивании сердечника в катушку пневмоклапан 4 отсоединяет камеру с от атмосферы, а клапан 2 соединяет ее с каналом пневмосети, в результате сжатый воздух, воздействуя на дифференциальный плунжер 1 перемещает плоский золотник 9 в левое положение, в соответствии с чем поршень пневмоцилиндра 6 перемещается влево.
В конце хода штока пневмоцилиндра 6 им приводится в действие выключатель 8, который обесточивает электромагнит 3, в результате клапан 4 соединяет камеру с с атмосферой, а клапан 2 перекрывает канал d, соединяющий ее с камерой b между дифференциальными поршнями распределительного плунжера 1. При этом плунжер вместе с золотником 9 в результате действия на его поршни неуравновешенного вследствие разности площадей давления в камере перемещается вправо (в положение, показанное на рис. 17), соединяя левую полость пневмоцилиндра б с каналом а питания. В результате шток пневмоцилиндра 6 возвратится в исходное положение, воздействуя в конце своего хода на выключатель 7. Далее цикл повторится.
На рис. 17, а представлена конструкция золотника с двусторонним пневматическим управлением прямого действия.
Плоский золотник 5 перемещается из одного крайнего положения в другое поршнями 1 и 4, общий шток 2 которых механически связан с золотником. К зеркалу корпуса 6 распределителя золотник 5 прижимается усилием пружины 3 и давлением воздуха в камере g, соединенной с каналом с питания.
Сжатый воздух подводится к каналу с и отводится в атмосферу через канал е. Перемещение золотника осуществляется давлением сжатого воздуха, подводимого поочередно в цилиндры двустороннего поршня от какого-либо источника через отверстия а и b.
В одном из крайних положений золотника 5 сжатый воздух проходит к отверстию 1, связанному с одной из полостей пневмоцилиндра, а отверстие d в это время сообщается с атмосферой. В другом крайнем положении золотника отверстие f сообщается с атмосферой, а отверстие d второй полости пневмопривода — с магистралью сжатого воздуха. Следовательно, отверстия f и d, соединенные с полостями силового пневмоцилиндра, сообщаются попеременно при перемещении золотника 5 либо с каналом питания, либо с атмосферой. Необходимо учесть, что золотник в этой схеме распределения будет нагружен давлением воздуха, действующим на всю омываемую им поверхность.
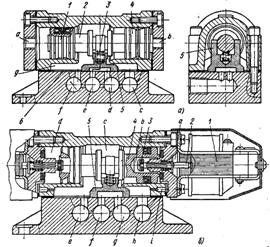
Рис. 17. Конструкция золотника с двусторонним управлением прямого действия
На рис. 17, б показана конструкция двухпозиционного четырехходового воздухораспределителя этого типа с двусторонним электропневматическим управлением. Сжатый воздух подводится к внутренней полости с воздухораспределителя через входное отверстие h и далее в зависимости от положения золотника 5 поступает к соответствующим каналам е или g, связанным с полостями пневмоцилиндра.
На рис. 17, б правый электромагнит 1 показан во включенном положении, а левый — в выключенном.
Якорь правого электромагнита, втягиваясь, нажимает на стержень 2 клапана управления, открывая затворы. Сжатый воздух из полости с через отверстие i малой площади сечения (дроссель) поступает в полости d и b под торцы поршня 4. При включенном правом электромагните стержень 3 вместе с резиновой прокладкой отодвигается влево, открывая выход сжатому воздуху из полости b через отверстие а в атмосферу. В результате давление воздуха в полости b падает, тогда как в полости d оно равно подводимому, ввиду чего поршень 4 с золотником 5 перемещается в правое положение. В этом положении золотника сжатый воздух из полости с поступает в отверстие е, а отверстие g сообщается с атмосферой через отверстие f. При этом поршень 4 кольцевым выступом (рыльцем) упирается в резиновую прокладку 6 и закрывает выход сжатому воздуху через отверстие а в атмосферу в течение всего времени, пока электромагнит включен.
При выключении правого электромагнита стержень (затвор клапана) 3 возвращается в исходное положение.
8. Электропневматический вентиль
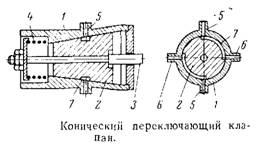
В системах пневмоавтоматики применяются для дистанционного управления воздушными магистралями вентили (рис. 18), в которых проходные каналы закрываются и открываются конусными клапанами, управляемыми электромагнитом.
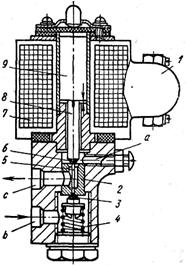
Рис.18. Схема электропневматического вентиля
При включении электротока, подводимого через клеммную коробку 1, якорь 9 перемещается вниз и с помощью толкателя 8 и клапана 6 перекрывает отверстие в верхнем седле клапана 2 и, одновременно нажимая через толкатель 5 на нижний клапан 3, открывает нижнее отверстие этого седла. При этом сжатый воздух, поступающий из магистрали в отверстие b, направляется через отверстие с к потребителю.
При обесточивании катушки 7 пружина 4 перемещает вверх нижний клапан 3, перекрывая поступление воздуха из магистрали. Одновременно с этим перемещается вверх верхний клапан 6, обеспечивая сброс через канал в седле клапана 2 и выпускное отверстие а воздуха из системы потребителя в атмосферу.
Заключение
В схемах автоматизации технологического оборудования термического производства используются самые различные приборы и аппаратура, завязанные в единую цепь управления работой.
Построение последовательности срабатывания механизмов оборудования строится на базе циклограммы работы и может быть последовательной, параллельной или комбинированной.
В связи с тем, что в термических цехах существует повышенная опасность возникновения пожаров из-за большого количества нагретого металла, в качестве энергоносителей используется электроэнергия и сжатый воздух. Применение гидравлики, работающей на минеральных маслах, сведено к минимуму по условиям пожароопасности.
Полностью автоматизированное оборудование выполняет весь цикл работ без участия обслуживающего персонала, роль которого сведена до роли наблюдателя за правильностью работы оборудования и течения технологического процесса.
Список использованной литературы
1. Автоматические регуляторы и следящие системы. Основы автоматического управления. Т. 3. под редакцией В. В. Солодовникова. М.: Машгиз, 1963.
2. Башта Т.М. Гидропривод и гидропневмоавтоматика. М. : Машиностроение, 1972.
3. Герц Е. В. Пневматические приводы. М.: Машиностроение, 1969.
4. Гамырин Н. С. Основы следящего привода. М., Оборонгиз. 1962.
5. Лемберг М. Д. Пневмоавтоматика. М. Госэнергоиздат, 1961.
6. Справочник машиностроителя, Т. 5/2 под ред. д.т.н. Э. А. Сатель. М.: Машиностроение, 1964.
Похожие работы
... Iуст 38А ≥ 31,25А Проверим токи установки относительно допустимых токов групп. Iдоп.пр ≥ 1,25*Iуст 20А = 19,4А Согласование обеспечено 2.5.3 Разработка устройства управления осветительной установки Большой резерв экономии электроэнергии, расходуемый на искусственное освещение, заложен в максимальной рационализации управления и регулирования режима работы осветительных ...
... генерация титранта Кулонометрическое титрование стало известно сравнительно недавно — в 1938 г. В кулонометрических приборах автоматического титрования в отличие от волюмометрических титрант генерируется электрохимическим путем в процессе титрования. Поэтому в кулонометрических приборах отсутствует такой элемент, как бюретка, подающая титрант. Генерация титранта происходит путем электролиза ...
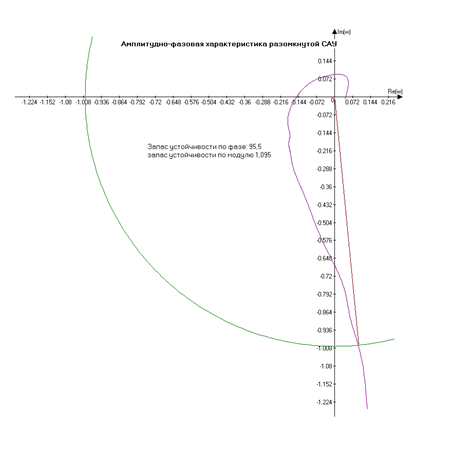
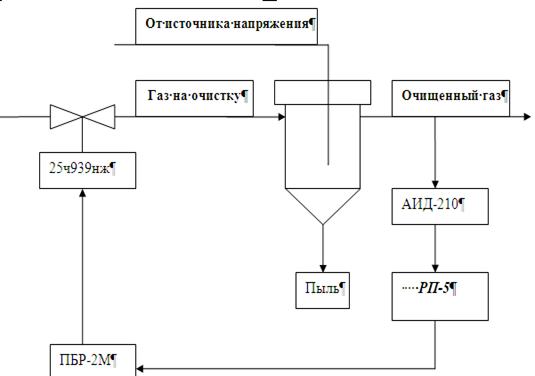
... параметры. Показателем эффективности данного процесса является степень очистки газа. Для решения задачи построена одноконтурная система управления процессом электрической очистки газа. Выбран регулятор и построена математическая модель системы управления. На модели определены оптимальные параметры регулятора. Выбраны приборы для основного контура регулирования. 1. Специальная часть ...
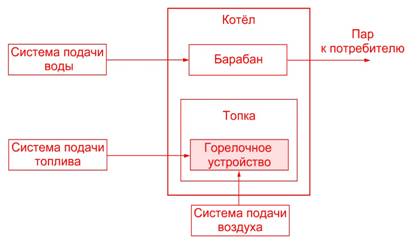

... режимов функционирования котла. Повышение экологических характеристик котельной и культуру производственного процесса. Благодаря программному управлению система автоматически отслеживает все параметры текущих процессов, реализуемых водогрейными и паровыми котлами, и управляет технологическим оборудованием, обеспечивая нормальное и безаварийное функционирование котельной установки. Кроме того, ...
0 комментариев