Навигация
Автоматизированные системы инструментального обеспечения
20658
знаков
2
таблицы
0
изображений
4. Автоматизированные системы инструментального обеспечения
Автоматизированная система инструментального обеспечения – система взаимосвязанных элементов, включающая участки подготовки инструмента, его транспортирования, накопления, устройства смены и контроля качества инструмента, обеспечивающие подготовку, хранение, автоматическую смену и замену инструмента.
Все разнообразие компоновочных схем АСИО можно свести к 6 типам:
Тип 1 – АСИО с запасом инструментальных комплектов, размещенных в инструментальных магазинах станков ГПС;
Тип 2.1 – АСИО с автоматизированным складом (накопителем) инструментальных комплектов при каждом станке ГПС;
Тип 2.2. 1 – АСИО с совмещенными подсистемами складирования и транспортирования инструментальных комплектов;
Тип 2.3 – АСИО, объединенная с АТСС;
Тип 3 – АСИО со сменными инструментальными магазинами.
Блок-схема алгоритма выбора типа АСИО представлена в /8/.
При выборе типа АСИО определяющим является суммарное количество, необходимых для обработки месячной нормы деталеустановок:
Кин=Кнаим (К1+КД),
где, Кнаим – число наименований деталеустановок;
К1 – число инструментов для обработки одной деталеустановки;
КД – число инструментов-дублеров на одну деталеустановку. Дублеры необходимы для инструментов с малой стойкостью (сверла, особенно малого диаметра). В расчетах можно принимать КД=2–3.
 ,
,
где, Тср – средняя станкоемкость обработки одной деталеустановки;
Тин – среднее время работы одного инструмента;
kS-число типоразмеров инструментов, требуемых для полной обработки детали-представителя;
m – число операций технологического процесса изготовления детали-представителя.
Из технологического процесса находим kS=25, m =2.
К1=25/2 =12,5; Кд=2, Кнаим=78,87 (из расчета АТСС).
Кин=78,87·(3+2)=1143,615
Поскольку инструменты, входящие в АСИО хранятся не только на цен
тральном инструментальном складе, но и в магазинах станков, то емкость ЦИС определяется как
Еис=Кин -![]() Еmci,
Еmci,
где Еmci – емкость инструментального магазина i-го станка ГПС.
Габаритные размеры инструментального склада определяются в зависимости от найденной емкости и размеров ячейки (шага) t=120… 200 мм.
![]() Еmci =60, Еис =1143,615 – 60 = 1083,615
Еmci =60, Еис =1143,615 – 60 = 1083,615
t принимаем равным 140 мм. Тогда при расположении инструментального склада в один ярус получаем Lгал/t =22395/140=159,96 = 160 ячеек, принимаем одноярусное расположение ячеек склада. Приняв высоту ячейки 500 мм и расстояние от нижнего яруса до пола цеха 450 мм, находим высоту склада:
Hис=500+450=950 мм.
Расчет загрузки транспорта АСИО
В АСИО смена инструментов осуществляется роботами-операторами (РО), работа которых во многом напоминает работу штабелеров. Для расчета количества роботов-операторов (коэффициента их загрузки) необходимо знать суммарное время их работы:
Кро=Тро/Fpo,
где Тро – суммарное время работы робота-оператора в течение месяца, ч;
Fpo – месячный фонд времени работы робота-оператора, ч.
В свою очередь суммарное время работы робота-оператора будет зависеть от типа системы инструментообеспечения.
Для расчета загрузки РО на складе примем, что инструмент, необходимый для доставки находится в центре склада. Считаем, что инструмент доставляется к станку без очередности их загрузки и без учета инструментальной емкости магазинов-накопителей при станках.
Среднее перемещение робота-оператора на инструментальном складе: Lcp(ис)=0.5 Lис = 22,395*0,5 = 11.2 м
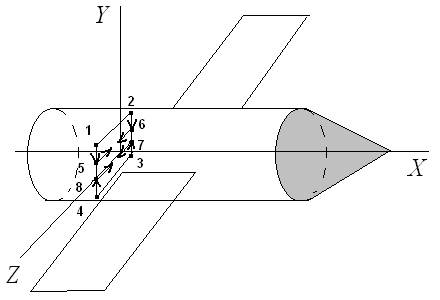
Среднее перемещение робота-оператора при доставке инструмента к инструментальному магазину станка (определяется графоаналитическим методом по схеме):
Lср (им) = (6,8+2,15+3,45)/ 3=4,13 м.
Определим основные расчетные характеристики робота-оператора, характеризующие его работу в линии.
Твв=6Тк+4Tпод+2Тпов+3 (Тв+Тп)+Тчк;
Тсм=4Тк+3Tпод+2 (Тв+Тп)+Тпов,
где Твв – время ввода-вывода одного инструмента;
Тк – время передачи управляющей команды от ЭВМ к роботу-оператору;
TПОД – среднее время подхода робота-оператора к заданному гнезду;
Тв – время выполнения роботом-оператором перехода «взять инструмент»;
Тп – время выполнения роботом-оператором перехода «поставить инструмент»;
Тсм – время смены одного инструмента;
Тпов – время поворота захвата на 180°.
Тк=0,02 мин; Тчк=0,1 мин;
Тв=Тп=0,2 мин; Тпов=0.04 мин.
Время, необходимое для осуществления тех или иных действий робота-оператора определяется исходя из совершаемых перемещении и скоростей этих перемещений.
![]()
Vх=60 м/мин; Vy=15 м/мин.
Принимаем, ![]() = 0,8 м.
= 0,8 м. ![]() = LCP(им)= 4,13 м
= LCP(им)= 4,13 м
Исходя из найденных перемещений по известным значениям скоростей перемещения, найдем время подвода робота-оператора к заданной точке инструментального склада или инструментального магазина:
Тпод(ис)=11,2/60+0,8/15=0,24 мин
Тпод(им)=4,13/60+0,8/15=0,12 мин
Твв=6·0,02+4·0,24+2·0,04+3·0,4+0,1=2,46 мин
Тсм=4·0,02+3·0,12+2·0,4+0,04=1,28 мин
Найдем коэффициент загрузки робота-оператора:
![]()
Рассчитаем суммарный коэффициент загрузки кранов-штабелеров и робота-оператора:
К=Ккш+Кро=0,71+0,19=0,9
На основании значения суммарного коэффициента загрузки делаем вывод, что в нашем случае имеем общий для всех станков инструментальный склад. Функции складирования, транспортирования и смены инструмента осуществляет робот-оператор.
Библиографический список
1. Обработка металлов резанием: Справочник технолога. /Под ред. А.А. Панова. – М.: Машиностроение, 1988. – 736 с.
2. Роботизированные технологические комплексы и гибкие производственные системы в машиностроении: Альбом схем и чертежей: Учеб. пособие для вузов /Под ред. Ю.И. Соломенцева. – М.: Машиностроение, 1989. – 846 с.
3. Справочник технолога-машиностроения: В 2-х т. Т. 1. /Под ред. А.Г. Косиловой и Р.К. Мещерякова. – М.: Машиностроение, 1985. – 656 с.
4. Справочник технолога-машиностроения: В 2-х т. Т. 2. /Под ред. А.Г. Косиловой и Р.К. Мещерякова. – М.: Машиностроение, 1987. – 496 с.
5. Технологические основы ГПС. /Под ред. Ю.С. Соломенцева. – М.:Машиностроение, 1991. – 240 с.
6. Козырев Ю.Г. Промышленные роботы: Справочник. – М.: Машиностроение, 1988.-392 с.
7. Кузнецов М.М. и др. Автоматизация производственных процессов /Под ред. Г.А. Шаумяна. – М.: Высш. шк., 1978. – 431 с.
8. Моисеев Ю.И., Катюк В.А. Классификация и выбор систем складирования, транспортирования и инструментального обеспечения гибких автоматизированных производств: Учеб. пособие. – Курган: Изд-во КМИ, 1993. – 58 с.
9. Моисеев Ю.И. Технологическое проектирование гибких производственных систем в машиностроении: Учеб. пособие. – Курган: Изд-во КМИ, 1996. – 87 с.
Похожие работы
... , может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей. Таким образом разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей. В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов. ...
... рисунков в формате А0-А1 со скоростью 10-30 мм/с. Фотонаборный аппарат Фотонаборный аппарат можно увидеть только в солидной полиграфической фирме. Он отличается своим высоким разрешением. Для обработки информации фотонаборный аппарат оборудуется процессором растрового изображения RIP, который функционирует как интерпретатор PostScript в растровое изображение. В отличие от лазерного принтера в ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...
... управления осуществляется с помощью автоматизированного модуля верхнего уровня, который также отвечает за интерфейс на посту оператора. 3.1 Требования к структуре системы Автоматизированная система управления и контроля климата в тепличных хозяйствах выполнена на базе микропроцессорной техники. По иерархическому принципу АСУ ККТХ должна подразделяться на уровни: нижний уровень: - ...
0 комментариев