Навигация
Системы автоматического регулирования водоснабжения
29927
знаков
0
таблиц
9
изображений
ВВЕДЕНИЕ
Характерным свойством систем управления, определяющим их как особый класс динамических систем, является использование текущей информации об управляемых и управляющих воздействиях при реализации обратных и компенсирующих связей, предназначенных для обеспечения оптимального качества управления по выбранному критерию.
Основы научного подхода к проектированию автоматических устройств были заложены еще в ХГХ в. русским ученым И. А. Вышнеградским, определившим, что машина и регулятор образуют единую динамическую систему. Им сформулированы также основные положения теории устойчивости и важнейшие закономерности регулирования по принципу обратной связи.
Повышение мощности, сложности и стоимости технологических комплексов и систем как объектов управления, ужесточение требований к качеству продукции, охране окружающей среды и безопасности персонала, а также обеспечение длительной работоспособности оборудования являются экономическими и социальными предпосылками к непрерывному совершенствованию систем управления.
В настоящее время достигнуты определенные успехи в создании автоматизированных (с участием человека) и полностью автоматических управляющих систем. Это способствовало бурному развитию микропроцессорных средств, способных выполнять весь комплекс функций по преобразованию, передаче, обработке, хранению и использованию информации для воздействия на технологический процесс и для связи с оператором. В первую очередь осуществляются измерение, контроль и регулирование состояния технологических объектов.
1. АВТОМАТИЗАЦИЯ ВОДОСНАБЖЕНИЯ
Водоснабжение городских потребителей хорошо механизировано и автоматизировано. Благодаря автоматизации человек практически освобожден от ручного труда при добыче, доставке и распределении воды на предприятия и в быту. Автоматизация позволила увеличить производительность труда по водоснабжению в 20 раз, снизить эксплуатационные затраты в 10 раз.
Для подъема и раздачи воды применяют водонасосные установки, состоящие из водоприемников, очистительных сооружений, резервуаров чистой воды или водонапорных башен, соединительной водопроводной сети и электронасосов со станциями управления. Наиболее широко в сельском хозяйстве распространены центробежные и осевые насосы. Насосы выполняют в моноблоке с электродвигателями и погружают в воду или располагают на поверхности земли.
Для подъема воды из открытых водоемов и шахтных колодцев используют также плавающие центробежные насосы. Широко распространены так называемые объемно-инерционные насосы с электромагнитным вибрационным приводом, рассчитанные на малую подачу воды (до 1 м3/ч при напоре 20 м).
В водоснабжении используют водонасосные установки трех типов: башенные с водонапорным баком, безбашенные с водонапорным котлом и непосредственной подачей воды в водопроводную сеть. Почти в 90 % случаев используют башенные водонасосные установки с расходом воды до 30 м3/ч. Если расход воды составляет 30...б5м3/ч, то рекомендуют двухагрегатные насосные станции с водонапорным котлом. При расходе воды более 65 м3/ч экономически целесообразно использовать насосные установки с непосредственной подачей воды в распределительную сеть.
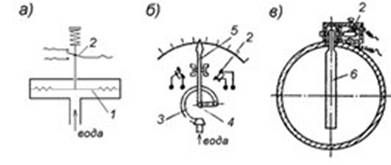
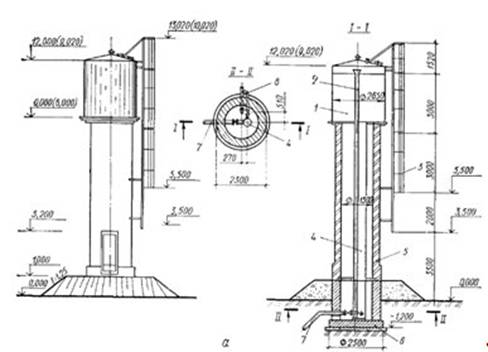
Безбашенная автоматическая водоподъемная установка типа ВУ (рис. 1.1) предназначена для подъема воды из открытых водоемов и шахтных колодцев глубиной до 5 м при напоре 25...80 м. Установка состоит из всасывающей трубы 1 с приемным фильтром насосного агрегата 2, нагнетательной 3 и водоразборной 12 труб с запирающими вентилями 5, воздушно-водяного бака 4 с датчиком давления 8 и струйным регулятором запаса воздуха, имеющего камеру смешивания 6, воздушный клапан 7, жиклер 10 и диффузор 11.
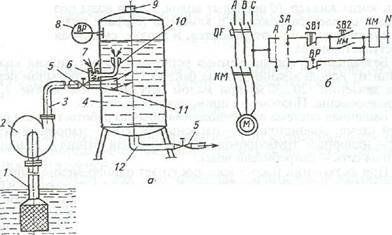
Рис.1.1. Технологическая схема водоподъемной установки типа ВУ (а) и принципиальная электрическая схема управления ею (б):
1 – всасывающая труба; 2 – насосный агрегат; 3 – нагнетательная труба; 4 – воздушно-водяной бак; 5 – запирающий вентиль; 6 – камера смешивания; 7 – воздушный клапан; 8 – датчик давления; 9 – предохранительный клапан; 10 – жиклер; 11 – диффузор; 12 – водозаборная труба
Схема управления в автоматическом режиме работает следующим образом. Вода к потребителю поступает под давлением воздушной подушки, расположенной над водой в котле. При разборе воды из котла давление в котле снижается и контакты манометрического датчика давления ВР замыкаются, катушка магнитного пускателя КМ получает питание и включает электронасос.
Давление включения, МПа, рассчитывают по формуле
P1 = (Hсв + Hр + Hпот )10-2
где Hсв — свободный напор у потребителя, м (для одноэтажных зданий 8 м, для двухэтажных — 12 м); Hр — разность отметок расчетных точек водопроводной сети и минимального уровня воды в баке, м; Hпот — потери напора в водопроводной сети, м.
При увеличении уровня воды давление в котле повышается до заданного значения, при котором контакты ВР размыкаются и насос отключается.
Давление выключения, МПа, определяют по формуле
P2 = 1,7 P1+ 0,7
Ручное управление электронасосом осуществляется кнопками SB2 «Пуск» и SB1 «Стоп».
Объем воздушной подушки в баке постоянно уменьшается, так как часть воздуха растворяется и выносится с водой. Вследствие этого уменьшается давление воздушной подушки и регулирующий объем в котле снижается.
Для автоматического поддержания объема воздушной подушки служит регулятор, обеспечивающий подкачку воздуха до давления в баке 250 кПа. При максимальных аварийных давлениях срабатывает предохранительный клапан 9. Пополнение воздуха происходит, когда жиклер 10 перекрыт водой. Струя воды под действием насоса создает разрежение в камере 6 (эффект пульверизации), воздушный клапан 7 открывается, и воздух, смешиваясь с водой, поступает в котел.
Безбашенные водоподъемные установки имеют низкий коэффициент использования объема бака (0,15...0,2)V, большой перепад давлений (20...30 м) при малом регулирующем объеме Vp и взрывоопасны. Поэтому их применяют ограничено.
Башенная система водоснабжения обычно работает по следующей схеме: водоисточник — насосный агрегат — напорный агрегат — напорный трубопровод — водонапорная башня — водопроводная сеть — потребители воды.
При включении насоса вода поступает одновременно к потребителям и в напорный бак башни. Количество поступающей в бак воды равно разности между подачей насоса и расходом потребителей. После наполнения 6av х насосный агрегат отключается и водоснабжение потребителей обеспечивается водой, запасенной в баке. Вместимость бака стандартных водонапорных башен-колонн 15...50 м3 и более. При этом общая вместимость бака определяется как сумма трех объемов: регулирующего, запасного и «мертвого». «Мертвый» объем, как правило, невелик. В него входят отстойная часть бака и часть объема бака от его верхней кромки до максимального уровня воды (высотой примерно 0,3 м).
Запасной объем должен хранить хозяйственно-производственный запас на случай перерыва в электроснабжении и, главное, пожарный запас воды, размеры которого определяются строительными нормами и правилами.
Регулирующий объем Vр (м3), подача насоса GH (м3/ч) и текущее потребление воды Gp (м3/ч) определяют продолжительность работы насосного агрегата
Tп=Vp/(Gн - Gp)
Продолжительность паузы
Tп=Vp/Gp.
Соответственно время цикла Тц = Тр+ Тп
Максимальное число включений будет при :
n = 0,25(Gн /Vp).
Наибольшее число включений в течение суток
nmax= 24n = 6(Gн /Vp).
По этой формуле определяют рабочий объем Vp, ограничивающий максимальное число включений насосного агрегата nmax:
n = 6 Gн / nmax
Рабочий объем бака при автоматическом управлении насосным агрегатом определяется расстоянием h между датчиками верхнего и нижнего уровней.
Таким образом, для того чтобы обеспечить число включений погружного насоса не более допустимого по техническим условиям, расстояние между датчиками верхнего и нижнего уровней (зона неоднозначности двухпозиционного регулятора) должно быть
n = 6 Gн / (nmaxF)
где F— площадь зеркала воды в баке, м3.
Опыт эксплуатации погружных насосов свидетельствует о том, что nmax не должно превышать 50...70 (в зависимости от конструкции) с интервалом между включениями не менее 5 мин.
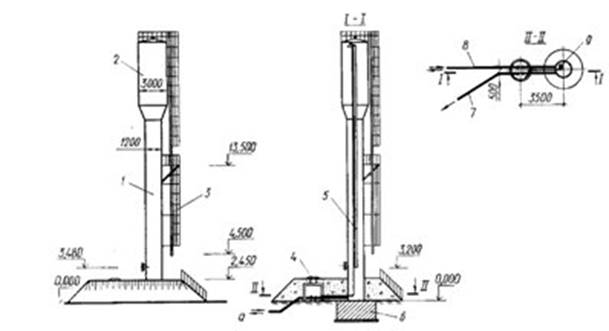
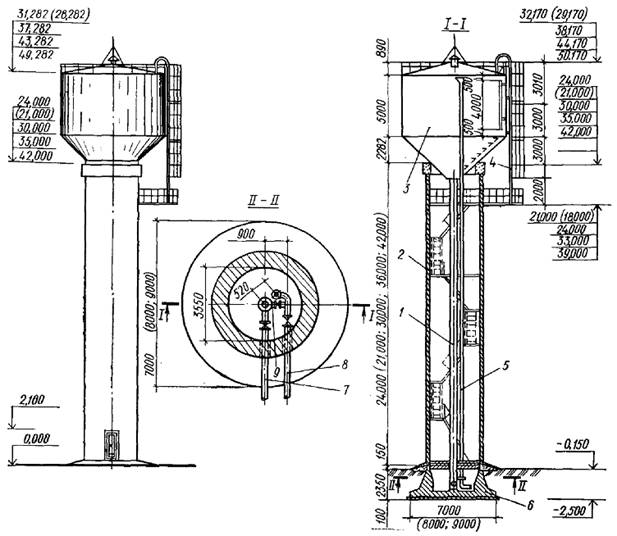
Схема башенной водонасосной станции с датчиком уровня воды изображена на рисунке 1.2, а, 6. Погружной электродвигатель 1 в монолите с многоступенчатым насосом 2 закреплен на водоподъемных трубах 3 и опущен в скважину 5. Трубы закреплены в плите 7, установленной в санитарно-техническом помещении 11. Скважины укреплены обсадными трубами диаметром 100...450 мм. Электродвигатели выполнены сухими, полусухими или заполненными водой. Наиболее распространены электродвигатели, заполненные водой. Резинометаллические или пластиковые подшипники также смазываются водой. К электродвигателю подведен кабель 6, закрепленный на водоподъемных трубах хомутами 4. Всасывающая часть трубы снабжена сеткой, задерживающей крупные примеси, которые могут содержаться в воде.
Бак 12 башни выполнен сварным из листовой стали и установлен на кирпичной, железобетонной или металлической опоре. К баку подведен напорно-разводящий трубопровод 10. Конец напорной трубы доведен до верхнего уровня, а отвод воды из бака происходит через обратный клапан у нижнего уровня. Бак оборудован внешней /7 и внутренней 18 лестницами, люком 16, вентиляционным клапаном 15, датчиком уровня 14 и водосливной трубой 13, исключающей переполнение бака водой в случае неотключения насоса. На водопроводе установлен манометр 8 и задвижки 9.
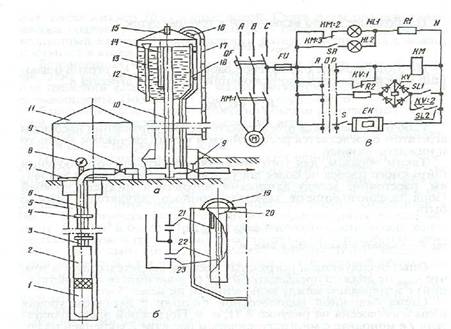
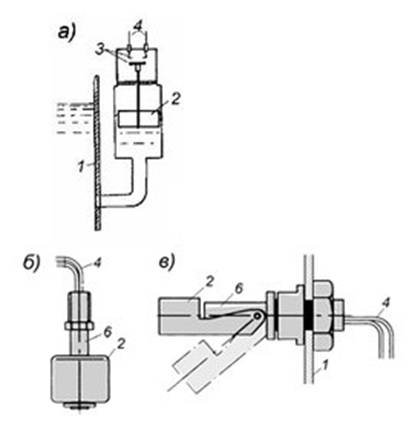
Рис. 1.2. Башенная водонасосная установка с погружным электродвигателем (а), схема датчика уровня воды (б) и принципиальная электрическая схема управления (в):
1— погружной электродвигатель; 2 — многоступенчатый насос; 3 — водоподъемные трубы; 4— хомуты; 5— скважина; 6— кабель; 7— плита; 8— манометр; 9— задвижки; 10— напорно-разводящий трубопровод; 11 — санитарно-техническое помещение; 12 — бак; 13 — водосливная труба; 14 — датчик уровня; 15—вентиляционный клапан; 16 — люк; 17 и 18— внешняя и внутренняя лестницы; 19— скоба; 20 — защитный корпус; 21, 22 и 23-электроды соответственно верхнего, нижнего и общего уровней
Электродный датчик уровня состоит из защитного корпуса 20, скобы 19 для крепления датчика в баке и трубчатых электродов: верхнего 21, нижнего 23 и общего 22 уровней. Внутри центрального электрода расположен нагревательный элемент, который включен в холодное время для исключения обмерзания электродов.
На рисунке 1.2, в показана принципиальная электрическая схема управления типа ПЭТ башенной водонасосной установкой. Она позволяет в ручном и автоматическом режимах пускать и останавливать электронасос, защищает электродвигатель от перегрузок и коротких замыканий, сигнализирует при помощи сигнальных ламп о включенном и отключенном состояниях насоса.
Ручное включение электронасоса осуществляют переводом переключателя SA в положение Р, а отключение — в положение 0. Автоматический режим работы задают переводом переключателя в положение Л. Если в баке воды нет, то контакты (электроды) датчика верхнего SL1 и нижнего SL2 уровней разомкнуты, следовательно, контакты реле КV в цепи катушки магнитного пускателя КМ замкнуты. Магнитный пускатель срабатывает и включает электронасос М. По мере накопления воды в баке перекрываются водой сначала контакты SL2 нижнего уровня, а затем SL1 верхнего уровня. При этом реле КV получает питание через воду. Контактами KV: 1 оно разрывает цепь питания магнитного пускателя КМ, и электронасос отключается. Реле KV остается включенным через контакты KV: 2, SL1 и SL2. Оно отключается только тогда, когда вода разомкнет не только верхние контакты, но и нижние. В этом случае контакты KV: 1 в цепи магнитного пускателя КМ вызовут повторное включение электронасоса М. Отключенное состояние насоса определяется по зеленой лампе HL1, а включенное — по красной HL2.
Защита двигателя осуществляется при помощи типовых расцепителей магнитного пускателя КМ а автомата QF.
На холодный период года выключателем S включается электрообогреватель ЕК датчика, предотвращающий обледенение и промерзание электродов датчика уровня.
Похожие работы
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...
... от переподъемов, нулевую и максимальную защиты. - предусматривать остановку сосудов в промежуточных точках ствола. световую сигнализацию о режимах работы подъемной установки в здании подъемной машины, у оператора загрузочного устройства, у диспетчера. Современные регулируемые электроприводы постоянного тока для автоматизированных подъемных установок выполняют на основе двигателей постоянного ...
... расхода и напора воды в водопроводной сети, создания ее запаса и выравнивания графика работы насосных станций. Их используют в системах производственного, хозяйственно-питьевого и противопожарного водоснабжения промышленных объектов, сельскохозяйственных комплексов и населенных мест. Запас воды определяется вместимостью бака, интенсивность напора — высотой башни (расстоянием по вертикали от уровня ...
... сигналами времени. Ядро предлагает интерфейс для программирования приложения с целью получения функций в виде отдельных программ. 1.2 Разработка автоматизированной системы управления электроснабжением КС «Ухтинская» 1.2.1 Цель создания АСУ-ЭС Целью разработки является создание интегрированной АСУ ТП, объединяющей в единое целое АСУ электрической и теплотехнической частей электростанции, ...
0 комментариев