Навигация
Разработка системы управления
80013
знаков
23
таблицы
30
изображений
2. Разработка системы управления
2.1 Описание схемы управления
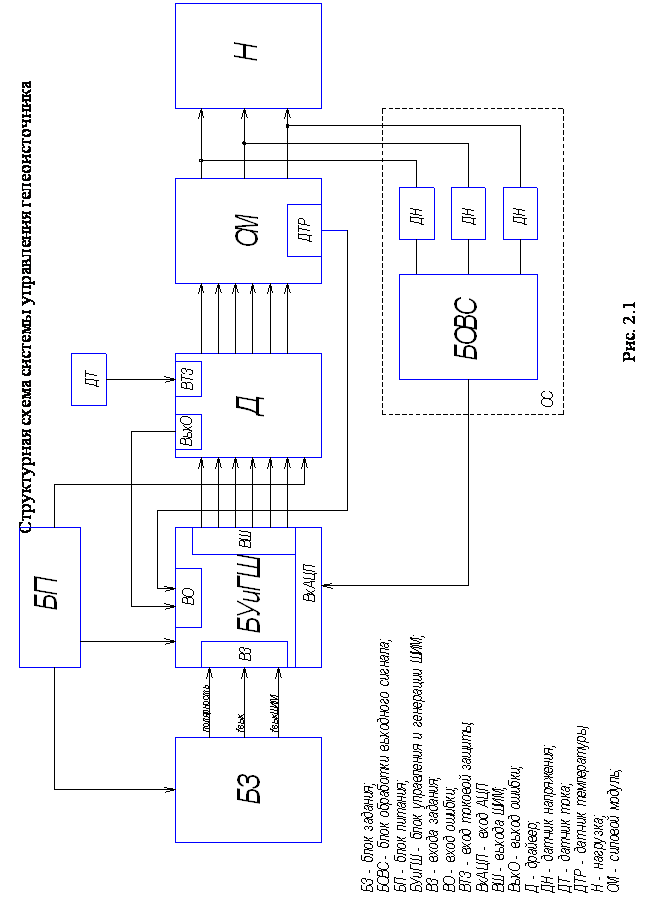
Структурная схема системы управления гелеоисточника изображена на рис. 2.1., на рис. 2.2 – схема электрическая принципиальная. Блоком управления (БУ) системы управления является микроконтроллер Motorola МС3РНАС, рис. 2.3, основные параметры микросхемы сведены в таблицу 2.1. Микросхема имеет встроенный модуль трехфазного ШИМ, для управления шестью ключевыми элементами, также есть 4‑х канальный АЦП, и последовательный интерфейс необходимый при режиме управления микроконтроллером с ПК. Модуль трехфазного ШИМ генерирует 6 ШИМ сигналов для задания выходного напряжения и частоты.
Таблица 2.1. Основные параметры микросхемы МС3РНАС
| № | Название параметра. | Значение и единица измерения |
| 1. | Напряжение питания | 5 В ± 10% |
| 2. | Рабочая частота кварцевого генератора | 4 МГц ± 1% |
| 3. | Частота ШИМ | 5,291 – 21,164 кГц |
| 4. | Задержки переключений | 0 – 31,875 мкс |
| 5. | Рабочая температура | – 40 – 1050 С |
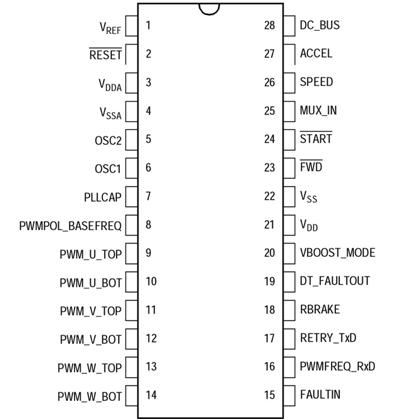
Назначение выводов МК[1]:
1. Vref – эталонное напряжение. Соединяется с VDDA для лучшего соотношения сигнал/шум.
2. RESET – вход сброса. Низкий логический уровень сигнала на этом входе переводит все PWM выхода в высокоимпедансное состояние. Также данный вход может быть использован для сброса ошибки (например: низкий уровень VDD, ошибки времени, подача на вход FAULT_IN сигнала высокого уровня).
3. VDDA – питание внутренних генераторов.
4. VSSA – питание внутренних генераторов. 5 и 6 – вывода подключения кварцевого генератора.
7. PLLCAP – вывод подключения помехозащитного конденсатора. Малое значение емкости позволяет быстро формировать f эталонную. Большие значения позволяют улучшить стабильность. Значение емкости конденсатора 0,1 мкФ является типовым и рекомендовано производителем.
8. PWMPOL_BASEFREQ – вход задания базовой частоты и полярности ШИМ. 9 – 14 – выхода формирователя ШИМ.
15. FAULTIN – вход ошибки. При высоком логическом уровне сигнала на входе мгновенно отключаются PWM выхода. Включаются PWM выхода только после появления на входе сигнала низкого логического уровня.
16. PWMFREQ_RxD – в автономном режиме эта ножка используется для задания частоты ШИМ.
17. RETRY_TxD – выход управления ключом промежуточного контура.
18. RBRAKE – выход управления ключом промежуточного контура, для сброса энергии.
19. FAULTOUT – данный вывод используется для индикации ошибки.
20. VBOOST_MODE – вывод задания режима работы МК. Высокий логический уровень – автономный режим работы, низкий – режим работы с ПК.
21. VDD – напряжение питания, +5V.
22. Vss – вывод земли.
![]() 23. FWD – вход задания направления вращения двигателя.
23. FWD – вход задания направления вращения двигателя.
![]() 24. START – вход включения.
24. START – вход включения.

Микроконтроллер Motorola МС3РНАС.
Рисунок 2.2
25. MUX_IN – в автономном режиме является входом регулирования коэффициента заполнения.
26. SPEED – задание частоты вращения двигателя.
27. ACCEL – вход, влияющий на разгон двигателя.
28. DC_BUS – вход для отслеживания напряжения промежуточного контура.
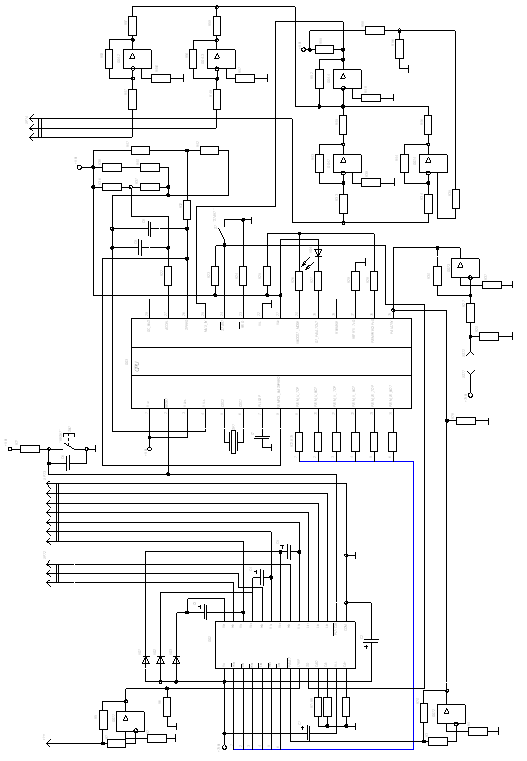
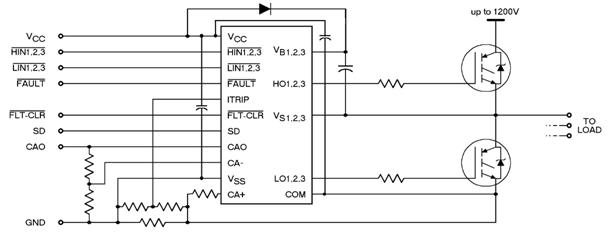
Как видно из рис. 1 схема управления состоит из следующих блоков. Блок задания (БЗ) для задания выходных параметров сигнала. Через делители напряжения на соответствующие входы задания БУ задаются полярность, частота выходного сигнала, а также частота ШИМ. Согласно заданным параметрам на выходах ШИМ формируются сигналы, которые далее поступают на драйвер (Д). Драйвером является микросхема IR2135, типовая схема подключения изображена на рис. 2.4, структурная схема изображена на рис. 2.5., основные параметры приведены в таблице 2.2 [2].
Таблица 2.2. Основные параметры микросхемы IR2135
| № | Название параметра. | Значение и единица измерения |
| 1. | Напряжение питания | 12 В |
| 2. | Максимальное коммутируемое напряжение | 1200 В |
| 3. | Выходной ток | 200 – 420 мА |
| 4. | Выходное напряжение | 10 – 20 В |
| 5. | Время переключений (типовое) | 700 нс |
| 6. | Рабочая температура | -55 – 1050 С |
Описание выводов микросхемы IR2135:
HIN 1,2,3 – логические входа (вывода 22,23,24) ключей высокого уровня.
НО 1,2,3 – логические выхода (вывода 13,16,19) ключей высокого уровня.
LIN 1,2,3 – логические входа (вывода 25,26,27) ключей низкого уровня.
LO 1,2,3 – логические выхода (вывода 9,10,11) ключей низкого уровня.
![]() FAULT – выход ошибки (вывод 28).
FAULT – выход ошибки (вывод 28).
VСС – напряжение питания (вывод 21).
ITRIP – вход токовой защиты (вывод 1).
FLT-CLR – вход сброса ошибки (вывод 2).
SD – логический вход выключения.
САО – выход усилителя тока.
СА– – инверсный вход усилителя тока.
СА+ – неинверсный вход усилителя тока.
![]() Микросхема имеет вход токовой защиты ITRIP рис. 2 (ВТЗ, рис. 1) и выход ошибки FAULT рис. 2.2 (ВыхО, рис. 2.1). При срабатывании токовой защиты (сигнал снимается с датчика тока ДТ, рис. 2.1) микросхема переводит все выхода в высокоимпедансное состояние и работа схемы приостанавливается, на выходе ошибки появляется логический сигнал высокого уровня. Сбрасывается ошибка путем подачи на вход FAULT-CLR (рис. 2.2) логического сигнала низкого уровня.
Микросхема имеет вход токовой защиты ITRIP рис. 2 (ВТЗ, рис. 1) и выход ошибки FAULT рис. 2.2 (ВыхО, рис. 2.1). При срабатывании токовой защиты (сигнал снимается с датчика тока ДТ, рис. 2.1) микросхема переводит все выхода в высокоимпедансное состояние и работа схемы приостанавливается, на выходе ошибки появляется логический сигнал высокого уровня. Сбрасывается ошибка путем подачи на вход FAULT-CLR (рис. 2.2) логического сигнала низкого уровня.
После драйвера сигнал поступает на силовые модули (СМ рис. 2.1), а затем на нагрузку (Н рис. 2.1). В блоке силовых ключей встроен датчик температуры (ДТР рис. 2.1), который останавливает работу схемы при превышении допустимой температуры, сигнал поступает на вход ошибки FAULT_IN (рис. 2.2) (ВО БУ (рис. 2.1)).
Датчики напряжения ДН (рис. 2.1) и блок обработки выходного сигнала (БОВС рис. 2.1) вместе являются обратной связью. Сигнал обратной связи принимается на вход регулирования выходного напряжения, путем изменения напряжения на входе аналогово-цифрового преобразователя (АЦП) (рис. 2.1). Все блоки в схеме питаются от блока питания (БП рис. 2.1). Схема блока питания (рис. 2.6) была заимствована с разработки блока питания используемого в автоматизированном электроприводе фирмы «Relains». Для данной схемы ниже рассчитан трансформатор.
Схема управления работает следующим образом. Включается система управления кнопкой S1 (рис. 2.2). БЗ задает параметры выходных импульсов БУ.
На выходах ВШ БУ формируются импульсы управления силовыми ключами. Однако широтно-модулированные импульсы задается относительно общего проводника схемы. Для ключевого транзистора нижнего уровня этого вполне достаточно, сигнал можно непосредственно подавать на затвор (базу), так как исток (эмиттер) связан с общим проводом. Если транзистор нижнего уровня находится в закрытом состоянии, a верхнего уровня открыт, на истоке транзистора верхнего уровня присутствует напряжение питания Un. Поэтому для управления транзисторами верхнего уровня необходима гальванически развязанная с общим проводом схема, которая четко будет передавать импульсы схемы управления не внося в нее искажений. Микросхема IR2135 решает эту проблему, имея отдельно выхода управления ключевыми транзисторами нижнего и верхнего уровней, а также защищает силовые ключи от таких эффектов как скорость нарастания тока, скорость нарастания напряжения и сквозных токов [2].
Датчики обратной связи контролируют выходное напряжение, далее сигналы поступают на БОВС. С помощью датчиков напряжения и БОВС схема управления поддерживает выходное напряжение инвертора в заданных пределах. При просадке выходного напряжения, если это не короткое замыкание в нагрузке, напряжение на выходе датчиков упадет, а на выходе БОВС увеличится, следовательно, увеличится напряжение на входе БУ (ВхАЦП). Данное напряжение регулирует коэффициент заполнения ШИМ, от которого зависит выходное напряжение инвертора. Как только напряжение на входе ВхАЦП увечится, то возрастет выходное напряжение. Время срабатывания датчика напряжения составляет 0,3 мкс, что гораздо меньше величины периода выходного напряжения.
0 комментариев