Навигация
Схемотехническое обоснование
61442
знака
4
таблицы
13
изображений
2. Схемотехническое обоснование
2.1 Синтез структурной схемы
Формирование адекватной длительности стимулов, при которой достигается минимизация пороговой энергии стимуляции и поддерживание этих условий в процессе длительного воздействия, требует контроля величины времени релаксации тока в зоне расположения электродов и введение управления в формирователь длительности стимулов. Структурная схема, реализующая данный принцип управления длительностью стимула, показана на рис. 2.1. Задающий генератор 1 определяет частоту следования стимулов, длительность которых задается в управляемом формирователе 2, связанном через коммутатор 3 и усилитель 4 с электродами 5, расположенными на участке биологической ткани. Сигнал тактового генератора 6, синхронизированный с импульсами стимуляции, переводит устройство в режим управления. В этом режиме на электроды 5 подается сигнал с формирователя измерительного импульса 7, представляющий собой импульс с прямоугольной огибающей. Возникающее на электродах под действием измерительного импульса экспоненциально возрастающее напряжение поступает на измеритель переходного процесса 8, который формирует временной интервал, соответствующий времени нарастании входного напряжения, т.е. контролируемой величине времени релаксации тока. Для сохранения измеренного значения на весь период управления служит запоминающее устройство 9, сбрасываемое в начале каждого такта управления сигналом тактового генератора 6. Выход запоминающего устройства 9 через устройство управления 10 связан с управляющим входом формирователя длительности стимула 2. Таким образом, длительность стимулов в режиме стимуляции устанавливается в соответствии с измеренным значением времени релаксации тока в тканях в предыдущем периоде управления. Период управления выбирается достаточно большим по сравнению с длительностью измерительного импульса и периода стимуляции. Для отслеживания изменений релаксационных свойств ткани в процессе стимуляции достаточно выбрать период управления равным 2…4 с, а длительность измерительного импульса 1,5…2,0 мс. Достоинством данной схемы является использование одной пары электродов для стимуляции и контроля параметров, что упрощает построение технического звена БТС.

|
|
|
|
|
Рисунок 2.1 - Структурная схема автоматического управления длительностью стимула.
1. – задающий генератор;
2. – управляемый формирователь;
3. – коммутатор;
4. – усилитель;
5. – электроды;
6. – тактовый генератор;
7. – формирователь измерительного импульса;
8. – измеритель переходного процесса;
9. – запоминающее устройство;
10. – устройство управления.
2.2 Синтез структурной схемы блока определения длительности стимула для устройства электроанальгезии
Блок определения длительности стимулирующего импульса для аппарата электроанальгезии является совокупностью трех блоков устройства для электроанальгезии, которые представлены под цифрами 8 -10 структурной схемы аппарата для ЭА (рис.2.1), упрощенная структурная схема приведена на рис.2.2. Более подробная структурная схема приведена в Приложении А.
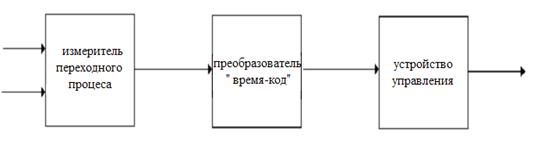
Рисунок 2.2 - Структурная схема блока определения длительности стимула для устройства электроанальгезии.
Измеритель переходного процесса представляет собой компаратор напряжения, который сравнивает между собой Uоп и Uизм, которые предварительно проходят через входные усилители. Далее сигнал поступает на запоминающее устройство, которое выполняет роль преобразователя «время – код», после чего код в цифровом виде поступает на устройство управления.
Устройство управления предназначено для формирования кода длительности стимула для задающего генератора и обеспечивает как автоматическую установку длительности стимула, так и ручную.
2.2.1 Запоминающее устройство Запоминающее устройство, которое представлено в структурной схеме, которая подробно рассмотрена в предыдущем пункте, под номером 9, является ничем иным, как преобразователем «время - код». Рассмотрим более подробно его структуру и принцип работы. 2.2.2 Преобразователь «время - код»Преобразователь «время – код » (ПВК) широко используется при построении различных автоматических систем радиотехнических, (дальномеры, высотомеры, радиолокация, радионавигация), при автоматизации научных исследований (например, физика плазмы), при построении информационно-справочных систем (например, для обслуживания спортивных соревнований) и т.д. В ряде случаев ПВК используется в качестве промежуточных преобразователей, когда исходная аналоговая величина предварительно преобразуется во временной интервал, а затем временной интервал – в код. Например, при преобразовании напряжения в код, частоты и фазы в код. Наконец, основные идеи построения ПВК используются при проектировании цифровых часов, широко распространенных в настоящее время.
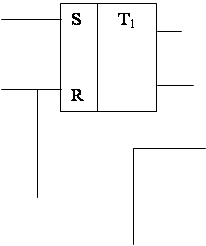
Метод электронного нониуса показан на рис.2.3. Схема работает следующим образом. В исходном состоянии триггеры T1 и T2, а также первый и второй счетчики установлены в нуль. По сигналу старт – импульса начинается измерение временного интервала классическим методом. По сигналу стоп – импульса в момент времени t1 в первом счетчике формируется число N, триггер T2 устанавливается в единицу и запускает ГИ2 с ударным возбуждением (рис.2.3.б), первый импульс которого совпадает со стоп – импульсом. Импульсы с периодом t2 от ГИ2 начинают поступать на второй счетчик и на второй вход схемы И2 , на первый вход которой приходят импульсы от ГИ1. В момент времени t2 импульсы ГИ1 и ГИ2 совпадают, а импульсы с выхода И2 устанавливают в нуль триггер T2, который сорвет колебания ГИ2 и тем самым прекратит поступление его импульсов во второй счетчик. В счетчике 2 зафиксируется поправка DN, пропорциональная погрешность Dt2. Докажем справедливость последнего утверждения. Пусть требуется на основании уравнения
d = t/m
уменьшить максимальную погрешность Dt2 и значений d. Тогда необходимо так выбрать t1 и t2, чтобы d = t1 - t2. Из рис.2.3.б следует, что Dt2 = pt1 - pt2 = pd, где p – число периодов t1 и t2, по прохождении которых произошло совпадение на схеме И2 импульсов ГИ1 и ГИ2. При правильной работе схемы p<=m. Однако в счетчике 2 фиксируется не число интервалов p, а число импульсов l, прошедших в него и которых оказывается на единицу больше, чем число интервалов p. Следовательно, p = l – 1, а Dt2 = pd = / l – 1/*d = DNd. Следовательно, соотношение для подсчета значения временного интервала Tx с учетом уменьшения погрешности Dt2 , при допущении, что Dt1 = 0, на основании уравнения
TX = TX* - Dt1 + Dt2
выглядит так:
TX= t1* N + S*DN.
Обычно величина m = 10…100.
Увеличение m в схеме электронного нониуса приводит к более жестким требованиям стабильности частоты генератора с ударным возбуждением ГИ2 и стабильности длительности импульсов t1 и t2, так как в противном случае при p > m, что приведет к неверной оценки погрешности Dt2.
|
|
|
![]()
![]()
![]()
![]()
 | |||||
![]()
![]()
![]()
|
|
| ||||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
![]()
Рисунок 2.3.а. – Схема преобразователя «время - код»
![]()
t1
ГИ2 Dt2
t2
pt2 совпадение
![]()
![]()
![]() pt1
pt1
t1 и t2
Рисунок 2.3.б. – Преобразование временного интервала в код
0 комментариев