Разработка и отладка аппаратных средств
Циклов записи/стирания FLASH памяти программы
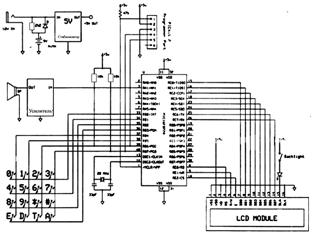
Разработка схемы электрической принципиальной
Расчет расходов на создание ПО
Расчет стоимости разработки конструкторской документации и сборки устройства
Требования к производственным помещениям
Шум и вибрация
Электромагнитное и ионизирующее излучения
Режим труда
Расчет вентиляции
Навигация
Расчет вентиляции
Разработка многофункциональных астрономических часов
102279
знаков
18
таблиц
12
изображений
4.5 Расчет вентиляции
В зависимости от способа перемещения воздуха вентиляция бывает естественная и принудительная.
Параметры воздуха, поступающего в приемные отверстия и проемы местных отсосов технологических и других устройств, которые расположены в рабочей зоне, следует принимать в соответствии с ГОСТ 12.1.005-76. При размерах помещения 3 на 5 метров и высоте 3 метра, его объем 45 куб.м. Следовательно, вентиляция должна обеспечивать расход воздуха в 90 куб.м/час. В летнее время следует предусмотреть установку кондиционера с целью избежания превышения температуры в помещении для устойчивой работы оборудования. Необходимо уделить должное внимание количеству пыли в воздухе, так как это непосредственно влияет на надежность и ресурс эксплуатации ЭВМ.
Мощность (точнее мощность охлаждения) кондиционера является главной его характеристикой, от неё зависит на какой объем помещения он рассчитан. Для ориентировочных расчетов берется 1 кВт на 10 м2 при высоте потолков 2,8 – 3 м (в соответствии со СНиП 2.04.05-86 "Отопление, вентиляция и кондиционирование").
Для расчета теплопритоков данного помещения использована упрощенная методика:
Q=S·h·q (4.8)
где:Q – Теплопритоки
S – Площадь помещения
h – Высота помещения
q – Коэффициент равный 30-40 вт/м3 (в данном случае 35 вт/м3)
Для помещения 15 м2 и высотой 3 м теплопритоки будут составлять:
Q=15·3·35=1575 вт
Кроме этого следует учитывать тепловыделение от оргтехники и людей, считается (в соответствии со СНиП 2.04.05-86 "Отопление, вентиляция и кондиционирование") что в спокойном состоянии человек выделяет 0,1 кВт тепла, компьютер или копировальный аппарат 0,3 кВт, прибавив эти значения к общим теплопритокам можно получить необходимую мощность охлаждения.
Qдоп=(H·Sопер)+(С·Sкомп)+(P·Sпринт) (4.9)
где:Qдоп – Сумма дополнительных теплопритоков
C – Тепловыделение компьютера
H – Тепловыделение оператора
D – Тепловыделение принтера
Sкомп – Количество рабочих станций
Sпринт – Количество принтеров
Sопер – Количество операторов
Дополнительные теплопритоки помещения составят:
Qдоп1=(0,1·2)+(0,3·2)+(0,3·1)=1,1(кВт)
Итого сумма теплопритоков равна:
Qобщ1=1575+1100=2675 (Вт)
В соответствии с данными расчетами необходимо выбрать целесообразную мощность и количество кондиционеров.
Для помещения, для которого ведется расчет, следует использовать кондиционеры с номинальной мощностью 3,0 кВт.
4.6 Расчет уровня шума
Одним из неблагоприятных факторов производственной среды в ИВЦ является высокий уровень шума, создаваемый печатными устройствами, оборудованием для кондиционирования воздуха, вентиляторами систем охлаждения в самих ЭВМ.
Для решения вопросов о необходимости и целесообразности снижения шума необходимо знать уровни шума на рабочем месте оператора.
Уровень шума, возникающий от нескольких некогерентных источников, работающих одновременно, подсчитывается на основании принципа энергетического суммирования излучений отдельных источников:
∑L = 10·lg (Li∙n), (4.10)
где Li – уровень звукового давления i-го источника шума;
n – количество источников шума.
Полученные результаты расчета сравнивается с допустимым значением уровня шума для данного рабочего места. Если результаты расчета выше допустимого значения уровня шума, то необходимы специальные меры по снижению шума. К ним относятся: облицовка стен и потолка зала звукопоглощающими материалами, снижение шума в источнике, правильная планировка оборудования и рациональная организация рабочего места оператора.
Уровни звукового давления источников шума, действующих на оператора на его рабочем месте представлены в табл. 4.6.
Таблица 4.6 - Уровни звукового давления различных источников
| Источник шума | Уровень шума, дБ |
| Жесткий диск | 40 |
| Вентилятор | 45 |
| Монитор | 17 |
| Клавиатура | 10 |
| Принтер | 45 |
| Сканер | 42 |
Обычно рабочее место оператора оснащено следующим оборудованием: винчестер в системном блоке, вентилятор(ы) систем охлаждения ПК, монитор, клавиатура, принтер и сканер.
Подставив значения уровня звукового давления для каждого вида оборудования в формулу (4.4) , получим:
∑L=10·lg(104+104,5+101,7+101+104,5+104,2)=49,5 дБ
Полученное значение не превышает допустимый уровень шума для рабочего места оператора, равный 65 дБ (ГОСТ 12.1.003-83). И если учесть, что вряд ли такие периферийные устройства как сканер и принтер будут использоваться одновременно, то эта цифра будет еще ниже. Кроме того при работе принтера непосредственное присутствие оператора необязательно, т.к. принтер снабжен механизмом автоподачи листов.
ВЫВОДЫ
В данном дипломном проекте рассмотрены вопросы проектирования многофункциональных астрономических часов, которые еще не выпускаются промышленностью.
В проекте рассмотрены теоретические вопросы создания устройств на микроконтроллера: этапы выполнения работ, разработка программного обеспечения, внедрения в производство.
В проекте осуществлена практическая разработка многофункциональных астрономических часов, которые показываю различное время (марсианское, юлианское, лунное и др.), произведен выбор микроконтроллера для осуществления всех поставленных задач, разработаны структурная и функциональные схемы, разработана принципиальная схема, которая отличается своеобразной новизной.
В экономической части проекта произведен расчет себестоимости многофункциональных астрономических часов. Часы широкого применения не найдут, но могут будут использованы, как сувенирные часы. Правда в этих часах можно использовать функцию «Земные часы», использовать функции «Таймер», который выполняет и обратный отсчет времени. Стоимость часов при массовом производстве уменьшиться, т.к. стоимость на разработку устройства и программного обеспечения распределится на количество изготовленных устройств.
В разделе охрана труда мы произвели расчет естественного и искусственного освещения, системы кондиционирования, уровня шума на рабочем месте инженера-программиста и сопоставили с нормативными значениями. В процессе разработки устройства были рассмотрены и изучены множество источников информации, информация сети Интернет, осуществлен поиск устройств-аналогов, использованы цены на комплектующие Интернет-магазинов.
ПЕРЕЧЕНЬ ССЫЛОК
1. "Dimmable Fluorescent Ballast" – User Guide, 10/07, Atmel Corporation, http://www.atmel.com/dyn/resources/prod_documents/doc7597.pdf
2. ГОСТ13109-97. Нормы качества электрической энергии в системах электроснабжения общего назначения.
3. G. Howell "Five questions about resistors" // EDN, 9/28/2006, http://www.edn.com/contents/images/6372835.pdf
4. П. Хоровиц, У. Хилл "Искусство схемотехники" – Изд. 6-е, М.: Мир, 2003.
5. C. Hillman "Common mistakes in electronic design" // EDN, 12/14/2007 http://www.edn.com/contents/images/6512156.pdf
6."Frequently asked questions about dimmers" // http://www .lutron.com/product_technical/faq.asp
7. Л. Н. Кечиев, Е. Д. Пожидаев "Защита электронных средств от воздействия статического электричества" – М.: ИД "Технологии", 2005.
8. Жидецкий В.Ц., Джигирей В.С., Мельников А.В. Основы охраны труда: Учебник – Львов, Афиша, 2008 – 351с.
9. Денисенко Г.Ф. Охрана труда: Учебн.пособие – М., Высшая школа, 1989 – 319с.
10. Самгин Э.Б. Освещение рабочих мест. – М.: МИРЭА, 1989. – 186с.
11. Справочная книга для проектирования электрического освещения. / Под ред. Г.Б. Кнорринга. – Л.: Энергия, 1976.
12. Борьба с шумом на производстве: Справочник / Е.Я. Юдин, Л.А. Борисов;
Под общ. ред. Е.Я. Юдина – М.: Машиностроение, 1985. – 400с., ил.
13. Зинченко В.П. Основы эргономики. – М.: МГУ, 1979. – 179с.
14.Методичні вказівки до виконання дипломної роботи для учнів спеціальності «Оператор комп’ютерного набору; оператор комп’ютерної верстки»/ Упоряд.: Д.О. Дяченко, К.О. Ізмалкова, О.Г. Меркулова. – Сєверодонецьк: СВПУ, 2007. – 40 с.
15. Н. Заец. Многофункциональные часы. — Схемотехника, 2006, № 2,с. 41,42.
16. Н. Заец. Термометр - часы с датчиками фирмы Dallas Semiconductor. — Схемотехника, 2005, № 5, с. 52 - 55.
17. Н. Заец. Радиолюбительские конструкции на Р1С-микроконтроллерах. Книга 3. — М.: СОЛОН-Пресс, 2005, с. 248.
18. Н. Заец. Отечественные жидкокристаллические индикаторы TIC9162 с драйверами по технологии COG. - Схемотехника, 2005, №9, с. 9-11.
19. Н. Заец. Таймеры десятичного счета. — Электрик, 2006, № 7-8, с. 36 -39.
20. Мощные полевые переключательные транзисторы фирмы International Rectifier. — Радио, 2001, № 5, с. 45.
21. А. Долгий. Разработка и отладка устройств на микроконтроллерах. — Радио, 2001 ,№ 5-12, 2002, № 1.
22. А. Долгий. Программаторы и программирование микроконтроллеров. — Радио, 2004, № 1-12.
23. Н. Заец. Универсальный таймер. — Схемотехника, 2003, № 1, с. 53.
24. Н. Заец. Электронные самоделки для быта, отдыха и здоровья.— М.: СОЛОН-Пресс, 2009, 423 с.
ПРИЛОЖЕНИЯ
Приложение А
Таблица А.1 – Основные параметры микроконтроллера PIC16F877A
| Основные параметры | Ядро PIC16 |
| F,МГц | от 0 до 20 |
| Память: Flash,кБ | 8 |
| Память: RAM,кБ | 0.365 |
| Память: EEPROM,кБ | 0.25 |
| I/O (макс.),шт. | 33 |
| Таймеры: 8-бит,шт | 2 |
| Таймеры: 16-бит,шт | 1 |
| Таймеры: Каналов ШИМ,шт | 2 |
| Таймеры: RTC | Нет |
| Интерфейсы: UART,шт | 1 |
| Интерфейсы: SPI,шт | 1 |
| Интерфейсы: I2C,шт | 1 |
| Аналоговые входы: Разрядов АЦП,бит | 10 |
| Аналоговые входы: Каналов АЦП,шт | 8 |
| Аналоговые входы: Аналоговый компаратор,шт | 2 |
| VCC,В | от 2 до 5.5 |
| ICC,мА | 25 |
| TA,°C | от -40 до 125 |
| Корпус | PLCC-44 DIP-40 QFN-44 TQFP-44 |
Приложение Б
Программа для микроконтроллера многофункциональных астрономических часов
; ВЕРСИЯ 1.3
; V.1.1
; - Исправил сигнальную проблему установки
; V.1.2
; - Исправленный дефект с смятением иногда снова установка или остановка неправильного таймера
; - Приспособление за 1/4 второго утратят, когда таймер был reset смятением
; V.1.3
; - Некоторые таймеры блокировали, когда установка смятения были скорректированы
#include <p16F877A.inc>
__config _HS_OSC & _WDT_OFF & _LVP_OFF & _BODEN_ON & _PWRTE_ON ;& _CP_OFF
#include "LCD.h"
#include "KBD.h"
; Определения байта состояния
#define TMR_ON 7 ; 0 = от, 1 = на
#define TMR_DIR 6 ; 0 = inc, 1 = dec
#define TMR_ON_ALARM_RESET 4 ; 1 = на смятении, снова установленном таймере
#define TMR_ON_ALARM_STOP 3 ; 1 = на смятении, таймере остановки
; куски 0-1: сигнальный звук
; Корректировки Нормы
#define TMR_STD_LO 0xC5
#define TMR_STD_HI 0x66
#define TMR_XTR_LO 0x18
#define TMR_XTR_HI 0x80
#define PULSES_PER_TICK 0x20
#define F_TICK 0 ; флаг тикания
#define F_BTNDOWN 1 ; 1, если кнопка была вниз от предыдущей петли, 0 иначе
#define F_TMR_LABEL_DIRTY 2 ; набор, если этикетке таймера придется обновляться на показе
#define F_VAL_DISPLAY_DIRTY 3 ; набор, если этикетке значения придется обновляться на показе
#define F_CLOCK_STOPPED 4 ; набор, если главный отмечает время остановлен
#define F_CURSOR_DIRTY 5 ; набор, если местоположению курсора нужно обновляться или reset
#define F_VALUE_ENTERED 6 ; набор, если новое значение только введено
#define MSG_ID_Clear 0xFF
ТОЧНОСТЬ #define 7
#define KBD_SCAN_DELAY 3
#define D_SEL_TIMER 0x01 ; Место назначения - отобранный таймер
#define D_SEL_TIMER_LENGTH 0x02 ; Место назначения - отобранная длина таймера
#define D_SEL_TIMER_ALARM 0x03 ; Место назначения - отобранное сигнальное время таймера
#define D_SEL_TIMER_COPY 0x04 ; Место назначения - отобранный таймер; потребительная стоимость как таймер ID к значению таймера lookup
#define B_LED 0 ; RA0
#define B_SPK 1 ; RA1
#define SND_SILENT 0x00 ; не нет звука
#define SND_PIP 0x01 ; звук: "косточка"
#define SND_PEEP 0x02 ; звук: "чирикание"
#define SND_WHIP 0x03 ; звук: "кнут"
; макрокоманда math
Макрокоманда M_StorStatus, ГДЕ
movf STATUS,w
movwf , ГДЕ
endm
Макрокоманда M_RetrStatus, ГДЕ
movf WHERE,w
СТАТУС movwf
endm
; макрокоманда государственного аппарата
Макрокоманда IfJump BTN,ADDR
movlw BTN
subwf BTN_ID,w
btfsc STATUS,Z
goto ADDR
ENDM
; макрокоманда государственного аппарата
Макрокоманда AnyBtnJump ADDR
btfss BTN_ID,7
goto ADDR
ENDM
Макрокоманда IfState BTN,STATE
movlw BTN
subwf BTN_ID,w
btfss STATUS,Z
goto $+5
высокий ШТАТ movlw
movwf STATE_HI
низкий ШТАТ movlw
movwf STATE_LO
ENDM ; goto здесь
ШТАТ макрокоманды AnyBtnState
btfsc BTN_ID,7
goto $+5
высокий ШТАТ movlw
movwf STATE_HI
низкий ШТАТ movlw
movwf STATE_LO
ENDM ; goto здесь
ШТАТ макрокоманды GoToState
высокий ШТАТ movlw
movwf STATE_HI
низкий ШТАТ movlw
movwf STATE_LO
ENDM
Макрокоманда SetMsg NEW_MSG_ID
movlw NEW_MSG_ID
movwf MSG_ID
ENDM
cblock 0x20
; главные записи таймеров
LOOP_TIMER
ФЛАГИ
EE_ADDR
EE_DATA
CTR1
CTR2
TMP
TMP1
TMP2
TMP3
РЕДЖ
; отобранный таймер
SEL_TMR
SEL_TMR_SETTINGS
SEL_TMR_LEN:4
; сигнальные переменные
СМЯТЕНИЕ; 0, если смятение есть, сигнальный ID иначе
ALARM_TIMER; пересчитывает untill тиканий сигнальные переключатели от
; данные кнопочного пресса
BTN_ID
BTN_DOWN
; записи государственного аппарата
STATE_LO
STATE_HI
; записи показа
LCD_CURSOR_POSITION ; местоположение (куски 0-6) курсора и статус (кусок 7: 1=on; 0=off)
DISP:6
MSGL
MSGH
MSGDAT
MSG_ID; ID сообщения, которое должно показываться на втором ряду
MSG_ID_CURRENT; ID сообщения, в настоящий момент показанного на втором ряду
; записи math
REG_X:PRECISION
REG_Y:PRECISION
REG_Z:PRECISION
REG_COUNTER
REG_STATUS
REG_T1
REG_T2
REG_ROT_COUNTER
; записи ввода значения
VAL_STAT; статус - место назначения значения, которое введено (позже может использоваться, чтобы запомнить также формат в верхнем откусывании)
VAL_IND; индекс - индекс в настоящий момент введенного существования цифры
VAL_DIGIT; место, чтобы запомнить единую цифру, пока другие действия выполняются
VAL:6; значение непосредственно (может находиться в десятичном представлении или непосредственно в шестнадцатиричном)
endc
; прерывание отмечается в разделенном пространстве
cblock 0x78
INT_W
INT_STATUS
INT_PCLATH
INT_FSR
INT_PULSECTR
INT_TIMER
endc
cblock 0xA0
ТИМ:16*4
endc
cblock 0x120
LEN:16*4
endc
cblock 0x1A0
ALM:16*4
endc
cblock 0x1E0
TMR_SETTINGS:16*1
endc
org 0x00
Запуск goto
org 0x04
nop ; код прерывания следует - избегать потенциальных страниц проблем нумерации
Прерывание
movwf INT_W
swapf STATUS,W
СТАТУС clrf
movwf INT_STATUS
movf PCLATH,w
movwf INT_PCLATH
clrf PCLATH
movf FSR,w
movwf INT_FSR
;banksel T1CON; таймер остановки
bcf T1CON,TMR1ON
banksel TMR1H ; установленный TMR1 counter
decf INT_PULSECTR,f
btfss STATUS,Z
goto Interrupt_std_len
movlw TMR_XTR_LO
movwf TMR1L
movlw TMR_XTR_H
movwf TMR1H
movlw PULSES_PER_TICK
movwf INT_PULSECTR
incf INT_TIMER,f
goto Interrupt_continue
Interrupt_std_len
movlw TMR_STD_LO
movwf TMR1L
movlw TMR_STD_HI
movwf TMR1H
Interrupt_continue
banksel PIR1 ; очистите кусок избытка TMR1
bcf PIR1,TMR1IF
banksel PIE1 ; разрешите прерывание TMR1
bsf PIE1,TMR1IE
banksel T1CON ; стартовый таймер
bsf T1CON,TMR1ON
banksel PORTC
;movf INT_FSR,w
movwf FSR
movf INT_PCLATH,w
movwf PCLATH
swapf INT_STATUS,w
СТАТУС movwf
swapf INT_W,F
swapf INT_W,W
retfie
TMR_Init
banksel INTCON
bsf INTCON,PEIE
bsf INTCON,GIE
banksel T1CON
movlw b'00000000'
banksel PORTC
movlw PULSES_PER_TICK
movwf INT_PULSECTR
banksel PIR1 ; очистите кусок избытка TMR1
bcf PIR1,TMR1IF
banksel PIE1 ; разрешите прерывание TMR1
bsf PIE1,TMR1IE
banksel T1CON ; стартовый таймер
bsf T1CON,TMR1ON
banksel PORTC
возврат
SM_Init
movlw низкий S00_TimerSelectLoop
movwf STATE_LO
movlw высокий S00_TimerSelectLoop
movwf STATE_HI
возврат
Запуск
ФЛАГИ clrf
clrf INT_TIMER
clrf LOOP_TIMER
clrf LCD_CURSOR_POSITION
вызовите EEPROM_CheckInit
вызовите PORTS_Init
вызовите LCD_Init
вызовите SM_Init
вызовите ReadTimerDataFromEEPROM
clrf SEL_TMR
вызовите LCD_UpdateTimerLabel
вызовите TMR_Init
вызовите SPK_Whip
MainLoop
вызовите IfPlaySound
btfsc FLAGS,F_VALUE_ENTERED
вызовите ProcessEnteredValue
btfsc FLAGS,F_TMR_LABEL_DIRTY
вызовите LCD_UpdateTimerLabel
movf MSG_ID,w
subwf MSG_ID_CURRENT,w
btfss STATUS,Z
вызовите LCD_UpdateSecondRowMessage
btfsc FLAGS,F_VAL_DISPLAY_DIRTY
вызовите LCD_UpdateValDisplay
вызовите IfTick
вызовите KBD_Scan
movf STATE_HI,w
movwf PCLATH
movf STATE_LO,w
movwf PCL; идите к государственному аппарату
SM_Rtn; возвратная точка государственного аппарата
movlw высокий SM_Rtn
movwf PCLATH
movlw 0xFF
movwf BTN_ID
btfsc FLAGS,F_CURSOR_DIRTY
вызовите LCD_UpdateCursor
btfsc FLAGS,F_TICK
goto MainLoop_Tick
clrf TMP
MainLoop_Delay ; клавиатура debounce
decf TMP,f
nop
nop
btfss STATUS,Z
goto MainLoop_Delay
goto MainLoop
MainLoop_Tick
movf SEL_TMR,w
movwf CTR1
вызовите LoadSelTmrSettingsAndLen
вызовите MC_Normalize
вызовите MC_NormalizedTo86400
вызовите MC_86400toHMS
вызовите LCD_UpdateTimer
movf MSG_ID,w
sublw MSG_ID_Clear
btfss STATUS,Z
goto MainLoop
movf SEL_TMR,w
movwf CTR1
вызовите LoadSelTmrSettingsAndLen
вызовите MC_Normalize
вызовите MC_NormalizedToJulianNormalized
вызовите MC_NormalizedToDecimal
вызовите LCD_UpdateTimerDecimalPt
bcf FLAGS,F_TICK
goto MainLoop
ProcessEnteredValue
bcf FLAGS,F_VALUE_ENTERED
movf VAL_STAT,w
sublw D_SEL_TIMER_LENGTH
btfsc STATUS,Z
goto ProcessEnteredValue_STLEN
movf VAL_STAT,w
sublw D_SEL_TIMER
btfsc STATUS,Z
goto ProcessEnteredValue_ST
movf VAL_STAT,w
sublw D_SEL_TIMER_ALARM
btfsc STATUS,Z
goto ProcessEnteredValue_STALM
sublw D_SEL_TIMER_COPY
btfsc STATUS,Z
goto ProcessEnteredValue_COPY
возврат
ProcessEnteredValue_STALM
bsf STATUS,IRP; копируйте VAL в смятение
ProcessEnteredValue_ST
movf REG,w; копируйте VAL в таймер (или смятение, если STATUS,IRP является набором)
movwf FSR
movf VAL,w
movwf INDF
incf FSR,f
movf VAL+1,w
movwf INDF
incf FSR,f
movf VAL+2,w
movwf INDF
incf FSR,f
movf VAL+3,w
movwf INDF
bcf STATUS,IRP
возврат
ProcessEnteredValue_COPY
; НЕ ВЫПОЛНЯЮТ В ЭТОЙ ВЕРСИИ
; - получить таймер ID от данных часа
; - значение таймера груза
; - нормализировать значение
; - de-нормализировать отобранный ряд таймера значения
; - значение таймера копии к отобранному таймеру
возврат
ProcessEnteredValue_STLEN ; копируйте VAL в отобранную длину таймера
movf SEL_TMR,w
movwf CTR1
вызовите CalculateEEPROMAddressFromCTR1
incf EE_ADDR,f
вызовите CalculateFileAddressFromCTR1
clrf TMP
ProcessEnteredValue_STLEN_1
movf TMP,w
addlw VAL
movwf FSR
movf INDF,w
movwf VAL_DIGIT
bsf STATUS,IRP
movf REG,w
andlw 0x7F
addwf TMP,w
movwf FSR
movf VAL_DIGIT,w
movwf INDF
bcf STATUS,IRP
movwf EE_DATA
вызовите EEPROM_Write
incf EE_ADDR,f
incf TMP,f
movf TMP,w
sublw 0x04
btfss STATUS,Z
goto ProcessEnteredValue_STLEN_1
вызовите LoadSelTmrSettingsAndLen
возврат
PORTS_Init
banksel PORTA
clrf PORTA
clrf PORTB
clrf PORTC
clrf PORTD
clrf PORTE
banksel TRISA
movlw b'00000110'
movwf ADCON1
movlw b'11111100' ; RA0=LED, RA1=SPK
movwf TRISA
movlw b'11110000' ; KBD
movwf TRISB
bcf OPTION_REG,7; ; разрешите слабые натяжения PORTB
clrf TRISC ; LCD: DB0-DB7
movlw 0xFF
movwf TRISD ; не используют - все входы
movlw b'0000000' ; LCD: RE0=RS, RE1=R/W; RE2=E
movwf TRISE
movlw b'11000000' ; разрешите прерывания
movwf INTCON
banksel PORTA
возврат
CalculateEEPROMAddressFromCTR1
; Высчитайте адрес данных таймера в EEPROM
movf CTR1,w
movwf EE_ADDR
bcf STATUS,C
rlf EE_ADDR,f
rlf EE_ADDR,f
rlf EE_ADDR,f
addwf EE_ADDR,f
возврат
CalculateFileAddressFromCTR1
; Адрес offsett таймера в РЕДЖЕ
movf CTR1,w
РЕДЖ movwf
bcf STATUS,C
rlf REG,f
rlf REG,f
ТИМ movlw
addwf REG,f
возврат
ReadTimerDataFromEEPROM
clrf CTR1
ReadTimerDataFromEEPROM_loop
вызовите CalculateEEPROMAddressFromCTR1
вызовите CalculateFileAddressFromCTR1
; Установки таймера груза
movf CTR1,w
addlw низкий TMR_SETTINGS
movwf FSR
bsf STATUS,IRP
вызовите EEPROM_Read
movwf INDF
; Длины груза
incf EE_ADDR,f
movf REG,w
andlw 0x7F
movwf FSR
вызовите EEPROM_Read
movwf INDF
incf EE_ADDR,f
incf FSR,f
вызовите EEPROM_Read
movwf INDF
incf EE_ADDR,f
incf FSR,f
вызовите EEPROM_Read
movwf INDF
incf EE_ADDR,f
incf FSR,f
вызовите EEPROM_Read
movwf INDF
bcf STATUS,IRP
; Offsetts груза (начальные значения)
incf EE_ADDR,f
movf REG,w
movwf FSR
вызовите EEPROM_Read
movwf INDF
incf EE_ADDR,f
incf FSR,f
вызовите EEPROM_Read
movwf INDF
incf EE_ADDR,f
incf FSR,f
вызовите EEPROM_Read
movwf INDF
incf EE_ADDR,f
incf FSR,f
вызовите EEPROM_Read
movwf INDF
incf CTR1,f
movf CTR1,w
sublw 0x10
btfss STATUS,Z
goto ReadTimerDataFromEEPROM_loop
возврат
EEPROM_CheckInit
movlw 0xFE
movwf EE_ADDR
вызовите EEPROM_Read
movlw 0xA5
subwf EE_DATA,w
btfss STATUS,Z
goto InitEEPROM
incf EE_ADDR,f
вызовите EEPROM_Read
movlw 0x5A
subwf EE_DATA,w
btfsc STATUS,Z
возврат
InitEEPROM
clrf EE_ADDR
clrf CTR1
clrf CTR2
InitEEPROM_loop
movf CTR2,w
lcall LOOKUP_StdTmr
movwf EE_DATA
movlw высокий InitEEPROM_loop
movwf PCLATH
вызовите EEPROM_Write
incf EE_ADDR,f
incf CTR2,f
movf CTR2,w
sublw 0x09
btfss STATUS,Z
goto InitEEPROM_loop
clrf CTR2
incf CTR1,f
movf CTR1,w
sublw 0x10
btfss STATUS,Z
goto InitEEPROM_loop
movlw 0xFE
movwf EE_ADDR
movlw 0xA5
movwf EE_DATA
вызовите EEPROM_Write
incf EE_ADDR,f
movlw 0x5A
movwf EE_DATA
вызовите EEPROM_Write
возврат
EEPROM_Read
banksel EE_ADDR
movf EE_ADDR,w
banksel EEADR
movwf EEADR
banksel EECON1
bcf EECON1, EEPGD
bsf EECON1, RD
banksel EEDATA
movf EEDATA,w
banksel EE_DATA
movwf EE_DATA
возврат EEPROM_Write
banksel EE_ADDR
movf EE_ADDR,w
banksel EEADR
movwf EEADR
banksel EE_DATA
movf EE_DATA,w
banksel EEDATA
movwf EEDATA
banksel EECON1
bcf EECON1, EEPGD
bsf EECON1, WREN
bcf INTCON, GIE
movlw 0x55
movwf EECON2
movlw 0xAA
movwf EECON2
bsf EECON1, WR
bsf INTCON, GIE
EEPROM_Write_WaitForConfirmation
btfsc EECON1, WR
goto EEPROM_Write_WaitForConfirmation
bcf EECON1, WREN
banksel EE_ADDR
возврат
IfTick
movf INT_TIMER,w
btfss FLAGS,F_CLOCK_STOPPED
goto IfTick_Continue
movwf LOOP_TIMER
возврат
IfTick_Continue
subwf LOOP_TIMER,w
btfsc STATUS,Z
возврат
Тикание; вызванные 4 раза за вторые
incf LOOP_TIMER,f
movlw 0x01
xorwf PORTA,f
clrf CTR1
Tick_next_ctr
вызовите LoadSelTmrSettingsAndLen
btfss SEL_TMR_SETTINGS,TMR_ON
goto Tick_continue
btfss SEL_TMR_SETTINGS,TMR_DIR
goto Tick_increase
; Tick_decrease
вызовите DecTimer
goto Tick_checkAlarm
Tick_increase
вызовите IncTimer
Tick_checkAlarm
вызовите CheckTimerAlarm
Tick_continue
incf CTR1,f
movlw 0x10
subwf CTR1,w
btfss STATUS,Z
goto Tick_next_ctr
bsf FLAGS,F_TICK
возврат LoadSelTmrSettingsAndLen ; грузы выбрали установки таймера и длину к SEL_TMR_SETTINGS и SEL_TMR_LEN
; установки груза
movf CTR1,w
addlw низкий TMR_SETTINGS
movwf FSR
bsf STATUS,IRP
movf INDF,w
movwf SEL_TMR_SETTINGS
; длина груза
вызовите CalculateFileAddressFromCTR1
movf REG,w
andlw 0x7F
movwf FSR
movf INDF,w
movwf SEL_TMR_LEN
incf FSR,f
movf INDF,w
movwf SEL_TMR_LEN+1
incf FSR,f
movf INDF,w
movwf SEL_TMR_LEN+2
incf FSR,f
movf INDF,w
movwf SEL_TMR_LEN+3
bcf STATUS,IRP
возврат
IncTimer; приращение таймер; убедитесь, что LoadSelTmrLen вызван перед movf REG,w
movwf FSR
incf INDF,f
btfss STATUS,Z
goto IncTimer_check
incf FSR,f
incf INDF,f
btfss STATUS,Z
goto IncTimer_check
incf FSR,f
incf INDF,f
btfss STATUS,Z
goto IncTimer_check
incf FSR,f
incf INDF,f
IncTimer_check
movf REG,w
movwf FSR
movf INDF,w
subwf SEL_TMR_LEN,w
btfss STATUS,Z
возврат
incf FSR,f
movf INDF,w
subwf SEL_TMR_LEN+1,w
btfss STATUS,Z
возврат
incf FSR,f
movf INDF,w
subwf SEL_TMR_LEN+2,w
btfss STATUS,Z
возврат
incf FSR,f
movf INDF,w
subwf SEL_TMR_LEN+3,w
btfss STATUS,Z
возврат
clrf INDF
decf FSR,f
clrf INDF
decf FSR,f
clrf INDF
decf FSR,f
clrf INDF
возврат
DecTimer ; уменьшение таймер; убедитесь, что LoadSelTmrLen вызван перед
movf REG,w
movwf FSR
movf INDF,f
btfss STATUS,Z
goto DecTimer_continue
incf FSR,f
movf INDF,f
btfss STATUS,Z
goto DecTimer_continue
incf FSR,f
movf INDF,f
btfss STATUS,Z
goto DecTimer_continue
incf FSR,f
movf INDF,f
btfss STATUS,Z
goto DecTimer_continue
movf SEL_TMR_LEN+3,w
movwf INDF
decf FSR,f
movf SEL_TMR_LEN+2,w
movwf INDF
decf FSR,f
movf SEL_TMR_LEN+1,w
movwf INDF
decf FSR,f
movf SEL_TMR_LEN,w
movwf INDF
DecTimer_continue
movf REG,w
movwf FSR
decf INDF,f
movlw 0xFF
subwf INDF,w
btfss STATUS,Z
возврат
incf FSR,f
decf INDF,f
movlw 0xFF
subwf INDF,w
btfss STATUS,Z
возврат
incf FSR,f
decf INDF,f
movlw 0xFF
subwf INDF,w
btfss STATUS,Z
возврат
incf FSR,f
decf INDF,f
возврат
CheckTimerAlarm
movlw 0x04
movwf TMP
movf REG,w
movwf FSR
CheckTimerAlarm_0
bsf STATUS,IRP
movf INDF,w
bcf STATUS,IRP
subwf INDF,w
btfss STATUS,Z
возврат ; не нет смятения
incf FSR,f
decf TMP,f
btfss STATUS,Z
goto CheckTimerAlarm_0
movf SEL_TMR_SETTINGS,w
andlw 0x03
СМЯТЕНИЕ movwf
clrf ALARM_TIMER
btfss SEL_TMR_SETTINGS,TMR_ON_ALARM_STOP
goto CheckTimerAlarm_1
; Таймер остановки на смятении
;movlw 0x01<<TMR_ON
;lcall ToggleTimerSettings
movf CTR1,w
addlw низкий TMR_SETTINGS
movwf FSR
bsf STATUS,IRP
movlw 0x01<<TMR_ON
xorwf INDF,f
bcf STATUS,IRP
CheckTimerAlarm_1
btfss SEL_TMR_SETTINGS,TMR_ON_ALARM_RESET
возврат
; Снова установленный таймер на смятении
;movf SEL_TMR,w
;movwf CTR1
вызовите CalculateFileAddressFromCTR1
movf REG,w
movwf FSR
movlw 0x01
movwf INDF
incf FSR,f
clrf INDF
incf FSR,f
clrf INDF
incf FSR,f
clrf INDF
возврат
IfPlaySound
movlw SND_PIP
subwf ALARM,w
btfsc STATUS,Z
goto PlayPip
movlw SND_PEEP
subwf ALARM,w
btfsc STATUS,Z
goto PlayPeep
movlw SND_WHIP
subwf ALARM,w
btfsc STATUS,Z
goto PlayWhip
PlayContinue
СМЯТЕНИЕ clrf
возврат
PlayPip
lcall SPK_Pip
goto PlayContinue
PlayPeep
lcall SPK_Peep
goto PlayContinue
PlayWhip
lcall SPK_Whip
goto PlayContinue
ToggleTimerSettings ; коленчатый байт установок таймера
movwf TMP
movf SEL_TMR,w
addlw низкий TMR_SETTINGS
movwf FSR
bsf STATUS,IRP
movf TMP,w
xorwf INDF,f
bcf STATUS,IRP
возврат CopyDispToVal; копируйте в настоящий момент показанное значение таймера в VAL
movf DISP,w
movwf VAL
movf DISP+1,w
movwf VAL+1
movf DISP+2,w
movwf VAL+2
movf DISP+3,w
movwf VAL+3
movf DISP+4,w
movwf VAL+4
movf DISP+5,w
movwf VAL+5
возврат
M_CLR ; очистите запись
movwf FSR
ТОЧНОСТЬ movlw
movwf REG_COUNTER
M_CLR_loop
clrf INDF
incf FSR,f
decf REG_COUNTER,f
btfss STATUS,Z
goto M_CLR_loop
возврат
M_ROL ; вращайтесь запись влево
movwf FSR
M_StorStatus REG_STATUS
clrf REG_COUNTER
M_ROL_loop
M_RetrStatus REG_STATUS
rlf INDF,f
M_StorStatus REG_STATUS
incf FSR,f
incf REG_COUNTER,f
ТОЧНОСТЬ movlw
subwf REG_COUNTER,w
btfss STATUS,Z
goto M_ROL_loop
возврат
M_ROR ; вращается запись вправо
movwf FSR
ТОЧНОСТЬ-1 movlw
addwf FSR,f
M_StorStatus REG_STATUS
clrf REG_COUNTER
M_ROR_loop
M_RetrStatus REG_STATUS
rrf INDF,f
M_StorStatus REG_STATUS
decf FSR,f
incf REG_COUNTER,f
ТОЧНОСТЬ movlw
subwf REG_COUNTER,w
btfss STATUS,Z
goto M_ROR_loop
возврат
M_CMP ; Z <=> X СТАТУСА(C,Z)->
; Набор STATUS,C, если Z => X;
; Набор STATUS,Z, если Z == X
clrf REG_COUNTER
M_CMP_loop
movf REG_COUNTER,w
sublw REG_Z+PRECISION-1
movwf FSR
movf INDF,w
movwf REG_T1
movf REG_COUNTER,w
sublw REG_X+PRECISION-1
movwf FSR
movf INDF,w
subwf REG_T1,f
btfss STATUS,Z
возврат
incf REG_COUNTER,f
ТОЧНОСТЬ movlw
subwf REG_COUNTER,w
btfss STATUS,Z
goto M_CMP_loop
возврат
M_INC ; приращение запись
movwf FSR
ТОЧНОСТЬ movlw
movwf REG_COUNTER
M_INC_loop
incf INDF,f
btfss STATUS,Z
возврат
incf FSR,f
decf REG_COUNTER,f
btfss STATUS,Z
goto M_INC_loop
возврат
M_ADD ; Z + X -> Z
bcf STATUS,C
clrf REG_STATUS
clrf REG_COUNTER
M_ADD_loop
clrf REG_T1
btfsc REG_STATUS,C
incf REG_T1,f
clrf REG_STATUS
movlw REG_X
addwf REG_COUNTER,w
movwf FSR
movf INDF,w
addwf REG_T1,f
btfsc STATUS,C
bsf REG_STATUS,C
movlw REG_Z
addwf REG_COUNTER,w
movwf FSR
movf INDF,w
addwf REG_T1,f
btfsc STATUS,C
bsf REG_STATUS,C
movf REG_T1,w
movwf INDF
incf REG_COUNTER,f
ТОЧНОСТЬ movlw
subwf REG_COUNTER,w
btfss STATUS,Z
goto M_ADD_loop
возврат
M_SUB ; Z - X -> Z
clrf REG_COUNTER
bsf REG_STATUS,C
M_SUB_loop
bsf REG_T2,C
movlw REG_Z
addwf REG_COUNTER,w
movwf FSR
movf INDF,w
movwf REG_T1
movlw REG_X
addwf REG_COUNTER,w
movwf FSR
movf INDF,w
subwf REG_T1,f
btfss STATUS,C
bcf REG_T2,C
btfsc REG_STATUS,C
goto M_SUB_no_carry
movlw 0x01
subwf REG_T1,f
btfss STATUS,C
bcf REG_T2,C
M_SUB_no_carry
movlw REG_Z
addwf REG_COUNTER,w
movwf FSR
movf REG_T1,w
movwf INDF
bsf REG_STATUS,C
btfss REG_T2,C
bcf REG_STATUS,C
incf REG_COUNTER,f
ТОЧНОСТЬ movlw
subwf REG_COUNTER,w
btfss STATUS,Z
goto M_SUB_loop
btfss REG_STATUS,C
bcf STATUS,C
возврат
M_MUL ; X * Y -> Z
movlw REG_Z
вызовите M_CLR
movlw PRECISION*8+1
movwf REG_ROT_COUNTER
LCD_Init
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
movlw 0x00
movwf PORTE
movlw b'00110000'
movwf PORTC
вызовите LCD_PulseZ
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
movlw b'00111000'
movwf PORTC
вызовите LCD_PulseZ
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
movlw b'00111000'
movwf PORTC
вызовите LCD_PulseZ
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
вызовите LCD_Wait
movlw b'00111000'
movwf PORTC
вызовите LCD_PulseZ
movlw b'00001000'
movwf PORTC
вызовите LCD_PulseZ
movlw b'00000001'
movwf PORTC
вызовите LCD_PulseZ
movlw b'00000110'
movwf PORTC
вызовите LCD_PulseZ
movlw b'00001000'
movwf PORTC
вызовите LCD_PulseZ
movlw b'00000010'
movwf PORTC
вызовите LCD_PulseZ
;movlw b'10000000'
;movwf PORTC
;call LCD_PulseZ
;movlw b'00010100'
;movwf PORTC
;call LCD_PulseZ
;movlw b'10000000'
;movwf PORTC
;call LCD_PulseZ
bsf PORTE,0
movlw b'00001100'
вызовите LCD_SendCMD
movlw MSG_ID_Clear
movwf MSG_ID
movwf MSG_ID_CURRENT
возврат
LCD_SendDAT
movwf PORTC
bsf PORTE,0
вызовите LCD_PulseZ
возврат
LCD_SendCMD
movwf PORTC
bcf PORTE,0
вызовите LCD_PulseZ
bsf PORTE,0
возврат
MSG_NextChar_second
banksel EEDATA
movf EEDATA,w
banksel MSGDAT
movwf MSGDAT
bcf MSGDAT,7
incf MSGL,f
btfsc STATUS,Z
incf MSGH,f
bcf MSGH,7
movf MSGDAT,w
возврат
SPK_Delay
movlw 0x0F
movwf TMP
decf TMP,f
btfss STATUS,Z
goto $-2
возврат
SPK_Pip
movlw 0xFF
movwf TMP2
SPK_Pip_0
movlw 0x20
movwf TMP1
SPK_Pip_1
lcall SPK_Delay
decf TMP1,f
btfss STATUS,Z
goto SPK_Pip_1
movlw 0x01<<B_SPK
xorwf PORTA,f
decf TMP2,f
btfss STATUS,Z
goto SPK_Pip_
bcf PORTA,B_SPK
возврат
SPK_Peep
movlw 0x10
movwf TMP3
SPK_Peep_0
вызовите SPK_Pip
decf TMP3,f
btfss STATUS,Z
goto SPK_Peep_0
возврат
SPK_Whip
clrf TMP2
movlw 0xC0
SPK_Whip_0
movf TMP2,w
addlw 0x38
movwf TMP1
SPK_Whip_1
lcall SPK_Delay
decf TMP1,f
btfss STATUS,Z
goto SPK_Whip_1
movlw 0x01<<B_SPK
xorwf PORTA,f
decf TMP2,f
btfss STATUS,Z
goto SPK_Whip_0
возврат
org 0x1000
S00_TimerSelectLoop
clrf LCD_CURSOR_POSITION
SetMsg MSG_ID_Clear
IfJump VK_MENU_NEXT,S00_NextTmr
IfJump VK_MENU_PREV,S00_PrevTmr
IfState VK_MENU_ENTER,S10_AdjustTimer
lgoto SM_Rtn
S00_NextTmr
incf SEL_TMR,f
movlw 0x0F
andwf SEL_TMR,f
bsf FLAGS,F_TMR_LABEL_DIRTY
bsf FLAGS,F_TICK
lgoto SM_Rtn
S00_PrevTmr
decf SEL_TMR,f
movlw 0x0F
andwf SEL_TMR,f
bsf FLAGS,F_TMR_LABEL_DIRTY
bsf FLAGS,F_TICK
lgoto SM_Rtn
S10_AdjustTimer
clrf LCD_CURSOR_POSITION
SetMsg 0x00
IfState VK_MENU_EXIT,S00_TimerSelectLoop
IfState VK_MENU_NEXT,S20_AdjustClock
IfState VK_MENU_PREV,S20_AdjustClock
;IfState VK_MENU_PREV,S30_ThermometerSetup
IfState VK_MENU_ENTER,S11_SetTimer
IfJump VK_START_STOP,S10_StartStopTimer
IfJump VK_DIRECTION,S10_ToggleTimerDirection
lgoto SM_Rtn
S10_StartStopTimer
movlw 0x01<<TMR_ON
lcall ToggleTimerSettings
lgoto SM_Rtn
S10_ToggleTimerDirection
movlw 0x01<<TMR_DIR
lcall ToggleTimerSettings
lgoto SM_Rtn
S11_SetTimer
SetMsg 0x01 ; MSG_SetTimer
IfState VK_MENU_EXIT,S10_AdjustTimer
IfState VK_MENU_NEXT,S12_SetAlarm
IfState VK_MENU_PREV,S13_SetLength
IfState VK_MENU_ENTER,S15_SetTimerValue
lgoto SM_Rtn
S12_SetAlarm
SetMsg 0x07
IfState VK_MENU_EXIT,S10_AdjustTimer
IfState VK_MENU_NEXT,S13_SetLength
IfState VK_MENU_PREV,S11_SetTimer
IfState VK_MENU_ENTER,S21_SetAlarmTime
lgoto SM_Rtn
S13_SetLength
SetMsg 0x04 ; MSG_SetLength
IfState VK_MENU_EXIT,S10_AdjustTimer
IfState VK_MENU_NEXT,S11_SetTimer
IfState VK_MENU_PREV,S12_SetAlarm
IfState VK_MENU_ENTER,S16_SetLengthValue
lgoto SM_Rtn
S15_SetTimerValue
SetMsg 0x06 ; MSG_Set
movlw D_SEL_TIMER
movwf VAL_STAT
GoToState S_EnterValueHMS
lgoto SM_Rtn
S16_SetLengthValue
SetMsg 0x06 ; MSG_Set
movlw D_SEL_TIMER_LENGTH
movwf VAL_STAT
GoToState S_EnterLongValue
lgoto SM_Rtn
S20_AdjustClock
SetMsg 0x02
IfState VK_MENU_EXIT,S00_TimerSelectLoop
IfState VK_MENU_NEXT,S10_AdjustTimer
;IfState VK_MENU_NEXT,S30_ThermometerSetup
IfState VK_MENU_PREV,S10_AdjustTimer
IfJump VK_START_STOP,S20_StartStopClock
IfJump VK_SKIP_FORWARD,S20_StartStopClock
lgoto SM_Rtn
S20_StartStopClock
movlw 0x01<<F_CLOCK_STOPPED
xorwf FLAGS,f
lgoto SM_Rtn
S20_SkipForward
movlw (0x01<<F_CLOCK_STOPPED) % 0xFF
andwf FLAGS,f
incf INT_PULSECTR,f
incf INT_PULSECTR,f
incf INT_PULSECTR,f
incf INT_PULSECTR,f
lgoto SM_Rtn
;S30_ThermometerSetup
; SetMsg 0x03
; IfState VK_MENU_EXIT,S00_TimerSelectLoop
; IfState VK_MENU_NEXT,S10_AdjustTimer
; IfState VK_MENU_PREV,S20_AdjustClock
; lgoto SM_Rtn
S21_SetAlarmTime
SetMsg 0x08
IfState VK_MENU_EXIT,S12_SetAlarm
IfState VK_MENU_NEXT,S22_SetSound
IfState VK_MENU_PREV,S23_AlarmAction
IfState VK_MENU_ENTER,S21_EnterAlarmValue
lgoto SM_Rtn
S21_EnterAlarmValue
SetMsg 0x06 ; MSG_Set
movlw D_SEL_TIMER_ALARM
movwf VAL_STAT
movf SEL_TMR,w
movwf CTR1
lcall LoadSelTmrSettingsAndLen
movlw REG_Z
lcall M_CLR
movlw REG_X
lcall M_CLR
bsf STATUS,IRP ; TUK E PROBLEMAT!!!
lcall MC_Normalize_NO_CLR
bcf STATUS,IRP
lcall MC_NormalizedTo86400
lcall MC_86400toHMS
GoToState S_EnterValueHMS
lgoto SM_Rtn
S22_SetSound
SetMsg 0x09
IfState VK_MENU_EXIT,S12_SetAlarm
IfState VK_MENU_NEXT,S23_AlarmAction
IfState VK_MENU_PREV,S21_SetAlarmTime
IfState VK_MENU_ENTER,S40_SoundSelect
lgoto SM_Rtn
S23_AlarmAction
SetMsg 0x0A
IfState VK_MENU_EXIT,S12_SetAlarm
IfState VK_MENU_NEXT,S21_SetAlarmTime
IfState VK_MENU_PREV,S22_SetSound
IfState VK_MENU_ENTER,S51_SelectAction
lgoto SM_Rtn
S40_SoundSelect
movlw 0x03
andwf SEL_TMR_SETTINGS,w
movwf TMP
btfss STATUS,Z
goto S40_SoundSelect_0
; звук Безмолвен
GoToState S44_SoundSilent
lgoto SM_Rtn
S40_SoundSelect_0
movlw SND_PIP
subwf TMP,w
btfss STATUS,Z
goto S40_SoundSelect_1
; звук - это Косточка
GoToState S41_SoundPip
lgoto SM_Rtn
S40_SoundSelect_1
movlw SND_PEEP
subwf TMP,w
btfss STATUS,Z
goto S40_SoundSelect_2
; звук - это Чирикание
GoToState S42_SoundPeep
lgoto SM_Rtn
S40_SoundSelect_2
; звук - это Кнут
GoToState S43_SoundWhip
lgoto SM_Rtn
lgoto SM_Rtn
S41_SoundPip
SetMsg 0x0B
movlw SND_PIP
вызовите SetSound
IfState VK_MENU_ENTER,S22_SetSound
IfState VK_MENU_EXIT,S22_SetSound
IfState VK_MENU_NEXT,S42_SoundPeep
IfState VK_MENU_PREV,S44_SoundSilent
lgoto SM_Rtn
S42_SoundPeep
SetMsg 0x0C
movlw SND_PEEP
вызовите SetSound
IfState VK_MENU_ENTER,S22_SetSound
IfState VK_MENU_EXIT,S22_SetSound
IfState VK_MENU_NEXT,S43_SoundWhip
IfState VK_MENU_PREV,S41_SoundPip
lgoto SM_Rtn
S43_SoundWhip
SetMsg 0x0D
movlw SND_WHIP
вызовите SetSound
IfState VK_MENU_ENTER,S22_SetSound
IfState VK_MENU_EXIT,S22_SetSound
IfState VK_MENU_NEXT,S44_SoundSilent
IfState VK_MENU_PREV,S42_SoundPeep
lgoto SM_Rtn
S44_SoundSilent
SetMsg 0x0E
movlw SND_SILENT
вызовите SetSound
IfState VK_MENU_ENTER,S22_SetSound
IfState VK_MENU_EXIT,S22_SetSound
IfState VK_MENU_NEXT,S41_SoundPip
IfState VK_MENU_PREV,S43_SoundWhip
lgoto SM_Rtn
Action_SetAddress ; ПРЕДУПРЕЖДЕНИЕ: Это наборы STATUS,IRP! Очистите это после сделанного с INDF
movf SEL_TMR,w
addlw низкий TMR_SETTINGS
movwf FSR
bsf STATUS,IRP
bcf INDF,TMR_ON_ALARM_STOP
bcf INDF,TMR_ON_ALARM_RESET
возврат
S51_SelectAction
btfss SEL_TMR_SETTINGS,TMR_ON_ALARM_RESET
goto S51_SelectAction_ResetOff
S51_SelectAction_ResetOn
btfss SEL_TMR_SETTINGS,TMR_ON_ALARM_STOP
goto S51_SelectAction_GoToReset
S51_SelectAction_GoToBoth
GoToState S54_ActionBoth
lgoto SM_Rtn
S51_SelectAction_GoToReset
GoToState S52_ActionReset
lgoto SM_Rtn
S51_SelectAction_ResetOff
btfss SEL_TMR_SETTINGS,TMR_ON_ALARM_STOP
goto S51_SelectAction_GoToNone
S51_SelectAction_GoToStop
GoToState S53_ActionStop
lgoto SM_Rtn
S51_SelectAction_GoToNone
GoToState S51_ActionNone
lgoto SM_Rtn
S51_ActionNone
SetMsg 0x0F
movf SEL_TMR,w
вызовите Action_SetAddress
movf INDF,w
bcf STATUS,IRP
movwf SEL_TMR_SETTINGS
IfState VK_MENU_ENTER,S23_AlarmAction
IfState VK_MENU_EXIT,S23_AlarmAction
IfState VK_MENU_NEXT,S52_ActionReset
IfState VK_MENU_PREV,S54_ActionBoth
lgoto SM_Rtn
S52_ActionReset
SetMsg 0x10
вызовите Action_SetAddress
bsf INDF,TMR_ON_ALARM_RESET
movf INDF,w
bcf STATUS,IRP
movwf SEL_TMR_SETTINGS
IfState VK_MENU_ENTER,S23_AlarmAction
IfState VK_MENU_EXIT,S23_AlarmAction
IfState VK_MENU_NEXT,S53_ActionStop
IfState VK_MENU_PREV,S51_ActionNone
lgoto SM_Rtn
S53_ActionStop
SetMsg 0x11
вызовите Action_SetAddress
bsf INDF,TMR_ON_ALARM_STOP
movf INDF,w
bcf STATUS,IRP
movwf SEL_TMR_SETTINGS
IfState VK_MENU_ENTER,S23_AlarmAction
IfState VK_MENU_EXIT,S23_AlarmAction
IfState VK_MENU_NEXT,S54_ActionBoth
IfState VK_MENU_PREV,S52_ActionReset
lgoto SM_Rtn
S54_ActionBoth
SetMsg 0x12
вызовите Action_SetAddress
bsf INDF,TMR_ON_ALARM_STOP
bsf INDF,TMR_ON_ALARM_RESET
movf INDF,w
bcf STATUS,IRP
movwf SEL_TMR_SETTINGS
IfState VK_MENU_ENTER,S23_AlarmAction
IfState VK_MENU_EXIT,S23_AlarmAction
IfState VK_MENU_NEXT,S51_ActionNone
IfState VK_MENU_PREV,S53_ActionStop
lgoto SM_Rtn
SetSound
movwf TMP
movlw низкий TMR_SETTINGS
movwf FSR
movf SEL_TMR,w
addwf FSR,f
bsf STATUS,IRP
movlw 0xFC
andwf INDF,f
movf TMP,w
iorwf INDF,f
bcf STATUS,IRP
возврат
S_CopyFromTimer
movlw D_SEL_TIMER_COPY
movwf VAL_STAT
GoToState S_EnterLongValue
lgoto SM_Rtn
S_EnterLongValue ; введите длинное значение
movlw REG_Z
lcall M_CLR
lcall M_MOV_Z_TO_VAL
clrf VAL_IND
addlw 0x80 | 0x44
movwf LCD_CURSOR_POSITION
bsf FLAGS,F_CURSOR_DIRTY
bcf FLAGS,F_VAL_DISPLAY_DIRTY ; НЕ обновите показ VAL - это не используется здесь
GoToState S_EnterLongValue_Digit
lgoto SM_Rtn
S_EnterLongValue_Digit
pagesel $
IfState VK_MENU_EXIT,S_EnterLongValue_End
IfState VK_MENU_ENTER,S_EnterLongValue_Accept
pagesel $
btfsc BTN_ID,7
goto S_EnterLongValue_DigitRTN
movf BTN_ID,w
andlw 0x0F
lcall LOOKUP_DigitFromKeyID
movwf VAL_DIGIT
pagesel $
btfss VAL_DIGIT,7
goto S_EnterLongValue_Digit_1
lgoto SM_Rtn
S_EnterLongValue_Digit_1
movlw REG_Y
lcall M_CLR
movlw .10
movwf REG_Y
lcall M_MOV_VAL_TO_X
lcall M_MUL
movlw REG_X
lcall M_CLR
movf VAL_DIGIT,w
movwf REG_X
lcall M_ADD
lcall M_MOV_Z_TO_VAL
movf VAL_IND,w
addlw LCDCMD_SET_DD_RAM | 0x44
lcall LCD_SendCMD
movf VAL_DIGIT,w
addlw LCD_0
lcall LCD_SendDAT
incf VAL_IND,f
movf VAL_IND,w
addlw 0x80 | 0x44
movwf LCD_CURSOR_POSITION
bsf FLAGS,F_CURSOR_DIRTY
pagesel $
movf VAL_IND,w
sublw .10
btfsc STATUS,Z
decf VAL_IND,f
S_EnterLongValue_DigitRTN
lgoto SM_Rtn
S_EnterLongValue_Accept
bsf FLAGS,F_VALUE_ENTERED
S_EnterLongValue_End
clrf LCD_CURSOR_POSITION
bsf FLAGS,F_CURSOR_DIRTY
GoToState S13_SetLength
lgoto SM_Rtn
org 0x1800
da MSG_AdjustTimer ; 0x00
da MSG_SetTimer ; 0x01
da MSG_AdjustClock ; 0x02
da MSG_ThermometerSetup ; 0x03 - не используют в этой версии
da MSG_SetLength ; 0x04
da MSG_SetFormat ; 0x05
da MSG_Set ; 0x06
da MSG_SetAlarm ; 0x07
da MSG_SetAlarmTime ; 0x08
da MSG_SetSound ; 0x09
da MSG_AlarmAction ; 0x0A
da MSG_SoundPip ; 0x0B
da MSG_SoundPeep ; 0x0C
da MSG_SoundWhip ; 0x0D
da MSG_SoundSilent ; 0x0E
da MSG_ActionNone ; 0x0F
da MSG_ActionReset ; 0x10
da MSG_ActionStop ; 0x11
da MSG_ActionBoth ; 0x12
MSG_AdjustTimer
da "Приспособить Таймер",0
MSG_SetTimer
da "Установленный Таймер",0
MSG_AdjustClock
da "Приспособить Отмечает время",0
MSG_ThermometerSetup
"Терм da . Setup",0 ; не используют в этой версии
MSG_SetLength
da "Установленная Длина Цикла",0
MSG_SetFormat
da "Установленный Формат",0
MSG_Set
da "Set",0
MSG_SetAlarm
da "Установленное Смятение",0
MSG_SetAlarmTime
da "Сигнальное Время",0
MSG_SetSound
da "Сигнальный Звук",0
MSG_AlarmAction
da "Сигнальное Действие",0
MSG_SoundPip
da "Установил: Pip",0
MSG_SoundPeep
da "Установил: Peep",0
MSG_SoundWhip
da "Установил: Whip",0
MSG_SoundSilent
da "Установил: Silent",0
MSG_ActionNone
"Действие da : None",0
MSG_ActionReset
"Действие da : Reset",0
MSG_ActionStop
"Действие da : Stop",0
MSG_ActionBoth
"Действие da : Stop+Rst",0
org 0x1F80
LOOKUP_StdTmr
movwf TMP
movlw высоко $
movwf PCLATH
movf TMP,w
addwf PCL,f
; установки
retlw b'10000000'
; длина
retlw 0x00
retlw 0x46
retlw 0x05
retlw 0x00
; стартовый offsett
LOOKUP_DigitFromKeyID
movwf TMP
movlw высоко $
movwf PCLATH
LOOKUP_CursorPosHMS
movwf TMP
movlw высоко $
movwf PCLATH
movf TMP,w
addwf PCL,f
retlw 0xC4
retlw 0xC5
retlw 0xC7
retlw 0xC8
retlw 0xCA
retlw 0xCB
retlw 0xCC
КОНЕЦ
Приложение Д
Схема электрическая принципиальная многофункциональных астрономических часов
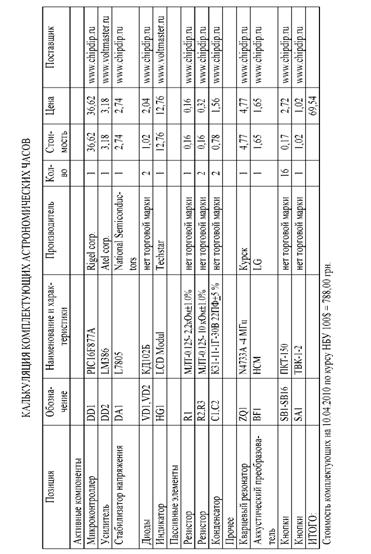
Приложение Ж
КАЛЬКУЛЯЦИЯ КОМПЛЕКТУЮЩИХ АСТРОНОМИЧЕСКИХ ЧАСОВ
Похожие работы
... примерно 350 обращений в год; – за время работы ОБЦ созданы 32 новых рабочих места, вновь созданы 2 фирмы и 2 подразделения в действующих фирмах. [19.C.96]. 2. Методические основы разработки стратегии развития бизнес-инкубатора 2.1 Цели, задачи и особенности подготовительного этапа разработки стратегии развития Цель разработки стратегии – сформулировать и предложить конкретные ...
... нац-й культуры, изучение спектра проблем общественного сознания. ü Материальные вопросы, наличие эк-ких предпосылок для решения возникших проблем.13. Современные проблемы в развитии социально-культурного сервиса и туризма. В РФ необходимо создание тур. комплекса, обеспечивающего, с одной стороны широкими возможностями для удовлетворения потребностей росс. и иностр. граждан в тур. услугах, ...
... энергосистемы. Таким образом, сложившаяся ситуация способствует хищениям электроэнергии, так как не позволяется эффективно с ними бороться. В настоящее время энергосбыт ведет активную работу по обнаружению и борьбе с хищениями электроэнергии. Контролеры энергосбыта производят осмотр приборов учета каждого бытового потребителя не реже одного раза в год. Планируется увеличить количество осмотров до ...
... сигналами времени. Ядро предлагает интерфейс для программирования приложения с целью получения функций в виде отдельных программ. 1.2 Разработка автоматизированной системы управления электроснабжением КС «Ухтинская» 1.2.1 Цель создания АСУ-ЭС Целью разработки является создание интегрированной АСУ ТП, объединяющей в единое целое АСУ электрической и теплотехнической частей электростанции, ...
0 комментариев