Выходное напряжение питания низкого уровня ( Uвых низ ур ): ………. < 0.45В
Логических элемента 2И на К155ЛИ1. Микросхема имеет два входа на каждый элемент, на выходе вырабатывается сигнал логического И
Способ сравнения - заключается в сравнении параметров неисправного аппарата с параметрами исправного аппарата того же типа или марки
Навигация
Логических элемента 2И на К155ЛИ1. Микросхема имеет два входа на каждый элемент, на выходе вырабатывается сигнал логического И
Разработка тестопригодной схемы МПС на базе МП I8080
40714
знаков
5
таблиц
2
изображения
4 логических элемента 2И на К155ЛИ1. Микросхема имеет два входа на каждый элемент, на выходе вырабатывается сигнал логического И.
4 логических элемента 2ИЛИ на К155ЛЛ1. Микросхема имеет два входа на каждый элемент, на выходе вырабатывается сигнал логического ИЛИ.
Условное обозначение Логических элементов представлено в Приложении 1 К155ЛИ1 (DD9.1 - DD9.4); К155ЛЛ1 (DD11);
Основные характеристики К155ЛИ1 и К155ЛЛ1:
Входной ток, мА, не более:
низкого уровня ………………………………………-1,6
высокого уровня ……………………………………..0,04
Входное напряжение, В:
низкого уровня, не более …………………………….0,4
высокого уровня не менее ……………………………2,4
Выходной ток, мА, не более:
низкого уровня ………………………………………16
высокого уровня…………………………………… - 0, 4
Средний ток потребления, не более ………………15мА
Напряжение питания………………………………….5В.
1.3 Разработка структурной схемы проектируемого устройства
Составные части проектируемого устройства изображаются упрощенно в виде прямоугольников произвольной формы (Рисунок 2 – Структурная схема МПС), т. е. с применением условно-графических обозначений.
Непосредственно рассматривая проектируемую мной МПС на базе I8080 в её составе можно следующие наиболее важных блоки:
Генератор тактовых импульсов (ГТИ) – предназначен для создания последовательностей тактовых импульсов Ф1 и Ф2, а также сигналов готовности Гт, сброса Сбр и строба состояния СС.
Программируемый связной адаптер (ПСА) – представляет собой универсальное приемо-передающее устройство, которое преобразует снимаемую с ШД МПС информацию из параллельной формы в последовательную, пригодную для передачи в линию связи, а также осуществляет обратное преобразование.
Программируемый периферийный адаптер (ППА) – при использовании в качестве интерфейсной БИС позволяет подключать к МПС различное периферийное оборудование без дополнительных логических схем. Инициализация и управление работой ППА осуществляется с использованием шести управляющих и адресующих сигналов, подаваемых низ МПС по линиям управления, 8-разрядного управляющего слова режима, подаваемого от МП через шину данных, а также ряда сигналов, поступающих из внешних устройств.
Программируемый интервальный таймер (ПИТ) – предназначен для реализации различных времязадающих функций. Инициализация и управление работой ПИТ осуществляется с использованием пяти управляющих сигналов, подаваемых от МП по линиям управления, трех 8-разрядных управляющих слов, подаваемых от МП по шине данных, а также трех входных и трех разрешающих сигналов, поступающих от внешних устройств.
Оперативное запоминающее устройство (ОЗУ) – предназначено для временного хранения промежуточных вычислений.
Постоянное запоминающее устройство (ПЗУ) – память программы, в которую записана программа (последовательность выполнения команд) микроЭВМ и постоянные величины (константы), необходимые для ее выполнения.
Микропроцессор (МП) – программно-управляемое устройство, осуществляющее обработку информации и управление ею.
Аналого-цифровой преобразователь (АЦП) – сигналы с аналоговых датчиков V1…V3 преобразует в цифровую форму. С выхода АЦП коды, полученные от аналоговых датчиков сохраняются в памяти для дальнейшей обработки.
Цифро-аналоговый преобразователь – преобразует цифровую информацию в аналоговые сигналы. МПС формирует управляющее воздействие в виде аналогового сигнала с ЦАП. Код поступающий на вход ЦАП формируется как сумма значений полученных после преобразования с АЦП от датчиков V1…V3.
Контроллер приоритета прерываний (КПП) – формирует запрос на прерывание работы МП БИС и выдаёт на шину данных микроЭВМ трехбайтовую команду CALL<A1><A2> и ответ на последовательное поступление трех сигналов ОБ. Пр с шины управлении микро-ЭВМ. Обрабатывает запросы на прерывания четырех уровней:
· INT0 – отказ источника питания (датчик аварийной ситуации Х0)
· INT1 – запрос от аварийного датчика
· INT2 – запрос от внешней ЭВМ
· INT3 – запрос с пульта оператора
Пульт оператора (ПО) - пульт управления содержит регистр со светодиодами индикации значений двоичных датчиков Х1…Х5, кнопку сброса, аварийную сигнализацию при сигнале от датчика Х0, тумблер «Останов», опрашиваемый каждый раз в конце программы.
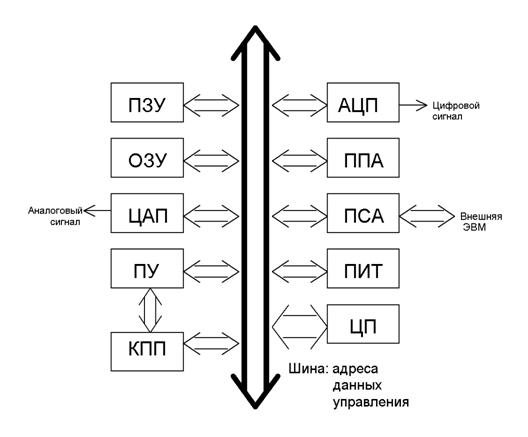
Рисунок 2
1.4 Разработка принципиальной схемы устройстваПринципиальная схема МПС разрабатывается на основе структурной схемы, которая была разработана в предыдущем разделе. Принципиальная схема является самой полной схемой. На ней изображены все элементы которые в дальнейшем будут находиться в печатной плате. Принципиальная схема проектируемого устройства изображена на формате А3 в Приложении_1.
Главным звеном микропроцессорной системы является центральный процессор. Он представляет собой программно-управляемое устройство, предназначенное для обработки цифровой информации и управления процессом этой обработки.
Типовая схема центрального процессора включает в себя микропроцессор КР580ВМ80А(DD1), генератор тактовых импульсов (ГТИ) КР580ГФ24(DD2), системный контроллер (СК) КР580 ВК38 (DD5) и адресные регистры КР580ИР82 (DD3,DD4).
Частота следования синхроимпульсов F1 и F2 в девять раз меньше частоты кварцевого резонатора ZQ1, нужно использовать кварцевый резонатор с частотой 18 КГц. Сопротивление кварцевого резонатора носит индуктивный характер, что приводит к снижению рабочей частоты. Для компенсации индуктивной составляющей резонатора последовательно с ним включается конденсатор емкостью 15-30 пФ.
Кроме тактирования микропроцессора ГТИ используется также как источник системных тактовых сигналов CLK.
Сигнал INT предназначен для начальной установки системных модулей при включении питания. Сигналы HOLD, HLDA, BUSEN реализуют режим прямого доступа к магистрали со стороны других активных модулей системы.
Системный контроллер формирует стробы записи, чтения, сигнал подтверждения прерывания а также буферизирует двунаправленную шину данных.
Построение модулей памяти МПC.
Исходными «кирпичиками» при построении модулей памяти служат отдельные БИС оперативной памяти, а также БИС ПЗУ.
При построении модулей памяти возникают задачи наращивания информационной емкости путем объединения БИС в соответствующую матрицу. Наращивание емкости может производиться двумя путями. Во-первых, можно расширять разрядность путем параллельного включения БИС. Последние в этом случае объединяются по всем выводам, кроме информационных, которые в совокупности образуют расширенную информационную шину.
Второй путь наращивания информационной емкости — объединение БИС памяти по информационным входам — выходам. Кроме них объединяются все остальные входы за исключением входов CS (выбор чипа). Сигналы на этих входах определяют, какой из микросхем необходимо включаться в работу. Максимальное число объединяемых таким образом БИС определяется допустимой емкостной нагрузкой на выходе микросхемы.
В данном случае используются микросхемы ПЗУ КР568РЕ1 – 2К*8 и ОЗУ КР541РУ2 – 1К*4. Выбор нужного слова производится с помощью 11 адресных сигналов А0—А10. Кроме того, эти микросхемы имеют входы CS (выбор чипа), управление этими входами осуществляется с помощью дешифратора типа К155ИД6, выборка микросхемы осуществляется подачей на дешифратор сигналов ADR11-ADR14. Микросхемы ПЗУ (ROM) и ОЗУ (RAM) включаются в работу в соответствии с таблицей раскраски памяти, таблица 2
Таблица 2
| Корпус МС | Адрес |
| ПЗУ 1 | 0000÷07FF |
| ПЗУ 2 | 0800÷0FFF |
| ПЗУ 3 | 1000÷17FF |
| ПЗУ 4 | 1800÷1FFF |
| ОЗУ 1-2 | 2000÷23FF |
| ОЗУ 3-4 | 2400÷27FF |
Разрабатываемый блок – КПП
Микросхема КР580ВН59 является многофункциональным программируемым устройством, формирующим запрос на прерывание работы МП БИС и выдающим на шину данных микроЭВМ трехбайтовую команду CALL<A1><A2> и ответ на последовательное поступление трех сигналов ОБ. Пр с шины управлении микро-ЭВМ. Значения адресов А1 и А2 сообщаются схеме в процессе выполнения программы ее начальной установки. Схема имеет восемь уровней запросов прерывания.
При одновременном поступлении импульсов на запрос прерывания схема определяет приоритетный уровень запроса, а также выполняет прерывание текущей программы обслуживания прерывания по входу запроса с более высоким приоритетом.
Схема имеет двунаправленную шину данных с возможностью перевода ее в третье состояние при подаче единичного сигнала на вход выборки ВМ при одновременной подаче единичных сигналов на входы INT и INTA. Шина данных используется для выдачи в микроЭВМ кoмaнды CALL< А1 > <А2> информации состояния, содержания внутренних регистров, а также для записи управляющих слов в схему.
Уровень «О» или «1» определяет один из двух адресов внутренних устройств схемы, с которым микроЭВМ обменивается информацией.
Внешние устройства выдают импульсы на формирование запроса прерывания на входные зажимы IRO —IR7 схемы. Уровень «1» на любом из этих входов воспринимается как импульс на формирование запроса прерывания. Все поступающие импульсы на входы. Запрос на прерывание выдается схемой на выход INT и поступает на вход INT Процессора.
1.5 Разработка программного обеспечения![]() Программа вычисления булевой функции Y=Х1*(Х2*Х3)vХ4.
Программа вычисления булевой функции Y=Х1*(Х2*Х3)vХ4.
![]() МПС опрашивает двоичные датчики, получает от них информацию, после чего вычисляет булевую функцию Y=Х1*(Х2*Х3)vХ4 и передаёт её значение в виде управляющего сигнала по выходному каналу. Таблица истинности представлена в таблице 3
МПС опрашивает двоичные датчики, получает от них информацию, после чего вычисляет булевую функцию Y=Х1*(Х2*Х3)vХ4 и передаёт её значение в виде управляющего сигнала по выходному каналу. Таблица истинности представлена в таблице 3
Таблица 3
| X4 | X3 | X2 | X1 | Y | |
| 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 1 | 1 |
| 2 | 0 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 1 | 1 |
| 4 | 0 | 1 | 0 | 0 | 0 |
| 5 | 0 | 1 | 0 | 1 | 1 |
| 6 | 0 | 1 | 1 | 0 | 0 |
| 7 | 0 | 1 | 1 | 1 | 1 |
| 8 | 1 | 0 | 0 | 0 | 0 |
| 9 | 1 | 0 | 0 | 1 | 1 |
| A | 1 | 0 | 1 | 0 | 0 |
| B | 1 | 0 | 1 | 1 | 1 |
| C | 1 | 1 | 0 | 0 | 1 |
| D | 1 | 1 | 0 | 1 | 1 |
| E | 1 | 1 | 1 | 0 | 0 |
| F | 1 | 1 | 1 | 1 | 1 |
Программа:
0800 3E 9A MVI A,9Ah; Загрузка управляющего слова в аккумулятор
0802 D3 F3 OUT F3h; Запись управляющего слова в порт
0804 DB F0 IN F0h; Чтение из порта А исходных данных
0806 E6 0F ANI 0Fh; Выделение значимых бит
0808 47 MOV B,A; Сохранение значимых бит
0809 E6 01 ANI 01h; Выделение 1-го бита
080B FE 01 CPI 01h; Сравнение
080D CA 19 08 JZ M1; Если равно, то переход к метке М1
0810 78 MOV A,B; Восстановление значимых бит
0811 FE 0C CPI 0Ch; Сравнение
0813 CA 19 08 JZ M1; Если равно, то переход к метке М1
0816 C3 2D 08 JMP END; Переход в конец программы
08 19 3E 01 M1: MVI A,01h; Установка аккумулятора в 1
081B D3 F1 OUT F1; Вывод в порт В результата
081D 06 40 MVI B,40h; Организация задержки
081F 3E FF M3: MVI A,FF Время выполнения тактов
0821 DE 01 M2: SBI 01; 400 000 тактов при частоте 2 МНz = 200 мс.
0823 C2 21 08 JNZ M2; Если не равно, переход по М2
0826 78 MOV A,B; Загрузка данных из В в А
0827 DE 01 SBI 01; Вычитание из А 01
0829 47 MOV B,A; Сохранение результата вычитания в В
082A C2 1F 08 JNZ M3;
082D AF END: XRA A; Обнуление аккумулятора
082E D3 F1 OUT F1h; Обнуление порта В
0830 00 NOP; Конец программы
Программа инициализации КПП:
0000 F3 DI ; Запрет прерывания
0001 3E 92 MVI A,12H; Запись в аккумулятор 12h
0003 32 0280 STA 2400H; Запись 2400 в аккумулятор
0006 FB ЕI; Включить обслуживание прерывания
2. Эксплуатационно-технологический раздел
2.1 Разработка функциональной модели наиболее вероятных неисправностей устройства
В работе данного устройства наиболее часто встречаются следующие неисправности:
1. Неисправности в работе ОЗУ в связи со слабой помехозащещенностью.
2. Неисправности в работе ключей SA1-SA5
3. Неисправности вследствие подачи на схему питания выше необходимого.
4. Неисправности в связи с перегоранием светодиодов VD1-VD5
Если такова неисправность обнаружена, то необходимо проверить все элементы схемы на работоспособность (особенно это касается микросхем, транзисторов и конденсаторов)
В данном устройстве будет использоваться наблюдаемость и управляемость для КПП.
Для КПП тестопригодность будет реализована на светодиодах и переключателях. На входы IR4-IR7 (запрос прерывания) и выход INT (Запрос прерывания на процессор) поставим светодиоды АЛ102ГФ, которые будут светиться при подаче на соответствующую линию логической единицы и на выходе INT – при выходе логической единицы. Это будет наблюдаемость. На все входы до светодиодов ставим переключатели, с помощью которых мы можем отключить КПП от МПС и падать на любые входы логические 1 или 0 и наблюдать, что будет на выходе INT (1- горит диод, 0 – не горит). Т.о. управляемость позволяет нам подать на входы комбинацию единиц и нулей, а наблюдаемость подтверждает подачу сигнала и показывает результат на выходе, на основе которого мы можем судить о правильности функционирования блока КПП.
2.2 Разработка алгоритма поиска неисправностейАлгоритм поиска неисправностей состоит из комплекса основных мероприятий, связанных с отыскиванием неисправности в устройстве. Эти мероприятия могут быть различными и включают в себя операции от осмотра корпуса на наличие повреждений до проверки сигналов в контрольных точках.
Составим алгоритм поиска неисправностей для нашего устройства:
1 Осмотреть корпус устройства на наличие повреждений;
2 Аккуратно разобрать устройство;
3 Тщательно осмотреть места контактов гибких проводников с печатной платой, а также проверить качество крепления выводов ИМС и ЭРЭ к контактным площадкам на плате;
4 Проверить целостность соединительных проводов;
5 Осмотреть печатную плату и ее компоненты на наличие физических повреждений или повреждений вследствие электрического пробоя;
6 Проверить наличие питания на плате;
7 Проверить работоспособность ИМС контрольно-измерительными приборами;
8 Проверить работоспособность генераторов тактов и тона;
9 Проверить выходные сигналы в контрольных точках.
Данный алгоритм позволяет выявить основные неисправности препятствующие нормальной работе МПС.
2.3 Анализ и выбор метода устранения неисправностейОпределение, отыскание неисправностей в процессе ремонта любого устройства является наиболее трудоемкой операцией, требующей большего внимания и мастерства.
Найти неисправность - значит, найти отказавший элемент, блок, модуль и т. д. В процессе ремонта можно выделить четыре этапа: установления факта наличия неисправности; выявление ее характера; устранения неисправности и проверка устройства после ремонта.
Существует несколько способов отыскания неисправностей. Выбор того или иного способа зависит от назначения устройства и особенностей схемы. Для отыскания неисправности требуется хорошее знание, как минимум принципиальной схемы и конструкции ремонтируемого устройства.
Все неисправности любого устройства можно разделить на механические и электрические.
К механическим неисправностям относятся неисправности в механических узлах устройства (выход из строя кнопок и переключателей, а также неконтакт в разъемах).
К электрическим неисправностям относятся такие, которые приводят к изменению электрического сопротивления цепей, значительному увеличению сопротивления, значительному уменьшению его или короткому замыканию (выход из строя резисторов, светодиодов, микросхем и т. п.).
При поиске неисправностей устройства применяют пять способов:
1. Внешний осмотр позволяет выявить большинство механических неисправностей, а также некоторые электрические. Внешним осмотром проверяется качество сборки и монтажа. При проверке качества сборки вручную следует проверить механическое крепление отдельных узлов, таких как переключатели, переменные резисторы, штепсельные соединения (разъемы).
Внешним осмотром проверяют также качество электрического монтажа. При этом выявляют целостность соединительных проводников, наличие затеков припоя, которые могут привести к коротким замыканиям между отдельными участками схемы, обнаруживают провода с нарушенной изоляцией, проверяют качество паек и т. п. Внешним осмотром можно выявить дефекты отдельных элементов (обрыв выводов, резисторов, механическое повреждение конденсаторов и другие).
Внешний осмотр, как правило, делают при отключенном питании аппаратуры. При его проведении особое внимание необходимо обращать на то, чтобы в монтаж не попали случайные предметы, которые при включении устройства могут вызвать короткое замыкание.
Внешним осмотром можно выявить неисправный светоэлемент (по яркости свечения), резистор (по изменению цвета или обугливанию поверхностного слоя) и другие элементы.
Во включенном состоянии можно определить перегрев трансформаторов, электролитических конденсаторов, полупроводниковых элементов. Появление запахов от перегретых обмоток, резисторов, пропиточного материала трансформаторов также сигнализирует о наличии неисправностей в схеме устройства.
Иногда в ходе осмотра возникает сомнение в исправности отдельных элементов. Тогда следует выпаять элемент и проверить его исправность более тщательно.
2. Способ промежуточных измерений. Заключается в последовательной проверке прохождения сигнала от блока к блоку до обнаружения неисправного участка.
3. Способ исключения - заключается в последовательном исключении исправных узлов и блоков.
4. Способ замены отдельных элементов, узлов или блоков на заведомо исправные, широко используется при ремонте устройств ВТ. Например, можно заменить элемент (транзистор, трансформатор, микросхему) или блок на заведомо исправный и убедиться в наличии неисправности на этом участке.
0 комментариев