Навигация
Разработка функциональной схемы, алгоритма процесса идентификации плоских деталей произвольной формы акустической локационной системы
30003
знака
3
таблицы
2
изображения
Разработка функциональной схемы, алгоритма процесса идентификации плоских деталей произвольной формы акустической локационной системы
СОДЕРЖАНИЕ
Введение
1. Анализ технического задания
2. ПОСТРОЕНИЕ ИНФОРМАЦИОННОЙ МОДЕЛИ ОБЪЕКТА ПРОИЗВОДСТВА
3. АНАЛИЗ ВОЗМОЖНЫХ ТЕХНИЧЕСКИХ РЕШЕНИЙ
4. РАЗРАБОТКА АЛГОРИТМА ИДЕНТИФИКАЦИИ
5. РАЗРАБОТКА ПРИКЛАДНОЙ ПРОГРАММЫ
5.1 Назначение и логическая структура
5.2 Вызов и загрузка
5.3 Руководство пользователя
Выводы
Перечень ссылок
ВВЕДЕНИЕ
Адаптивные промышленные роботы представляют собой новую ступень развития робототехники, для которой характерно создание гибкопрограммируемых устройств, оснащенных средствами очувствления для получения информации об окружающей среде, предмете производства и состоянии механизмов робота. Адаптивные роботы предназначены для работы в условиях с заранее неизвестными изменениями окружающей среды.
Адаптивный робот является производственной машиной с большими возможностями. К числу основных функций, выполняемых адаптивными роботами, относятся функции, выполняемые человеком в процессе его трудовой деятельности, а именно: восприятие внешней среды с помощью технических средств очувствления, принятие решений (микропроцессорная обработка информации), активное воздействие на внешнюю среду с помощью манипулятора.
Развитие адаптивных промышленных роботов обусловило создание многочисленных датчиков силомоментного и тактильного очувствления, систем технического зрения и локационных дальномеров.
Система очувствления промышленного робота методами локации, являющаяся одной из сенсорных систем восприятия информации о свойствах и состоянии объектов манипулирования и внешней среды, позволяет обеспечить целенаправленные движения робота.
Посредством датчиков локации обеспечивается измерение таких параметров, как расстояние до объектов, скорость движения, их размеры, обнаружение препятствий, а также исследование механических, электрофизических, акустических и других параметров объектов.
Измерительная информация локационных систем получается и преобразуется на основе ряда физических методов преобразования: акустических, магнитных, оптических, радиационных, радиоволновых, тепловых, электрических, электромагнитных и др. На базе этих методов для локационных систем проводят разработку и усовершенствование многих типов преобразователей.
Рассматриваемые датчики по своему назначению могут быть разделены на информационные локационные датчики для формирования управления роботом и локационные датчики безопасности, используемые для защиты исполнительного органа от столкновения с посторонними предметами. Информационные локационные датчики могут также быть использованы для определения положения объекта в пространстве относительно выбранной системы координат.
1. Анализ технического задания
Предметом данного курсового проекта является разработка функциональной схемы, алгоритма процесса идентификации плоских деталей произвольной формы акустической локационной системы.
Акустические локационные системы (АЛС) классифицируют по пяти основным признакам:
1) по назначению — дальномеры, охранные устройства и системы безопасности, дефектоскопы и томографы;
2) по типу первичного преобразователя — пьезоэлектрические, магнитострикционные и электростатические;
3) по характеру частотного спектра сигнала — широкополосные и резонансные;
4) по типу модулирующего воздействия — непрерывные и импульсные;
5) по избирательности — интерференционные и с широкой диаграммой направленности.
АЛС имеют чрезвычайно широкую область практического применения. Условно выделяют три основных направления применения АЛС: получение информации об объекте, прием и передача сигналов и активное воздействие на вещество. В рамках первого направления разрабатывают различные дефектоскопы, уровне- и толщиномеры, системы медицинской диагностики и звуковидения, гидролокационные приборы (эхолоты и гидролокаторы), работающие в диапазоне 10 ...1011 Гц. Второе направление в основном связано с созданием средств связи, а также ультразвуковых процессоров. Устройства этой группы функционируют на частотах 105...1010 Гц. Наконец, в акустических системах, активно воздействующих на вещество (например, хирургические инструменты, устройства механической обработки материалов и сварки), применяются колебания с высокой интенсивностью 1...10 Вт/м с частотой 10 …10 Гц.
Ультразвуком называются упругие колебания и волны, частота которых превышает 15 кГц. Таким образом, АЛС в основном работают в ультразвуковом диапазоне.
До недавнего времени считалось, что ультразвук редко встречается в природе, однако исследования последних лет показали, что наш мир — это мир звуков высокой частоты. Его источниками являются как живые существа, так и природные источники: леса, горы, молнии, ветер. Интенсивность излучателей ультразвука варьируется в широких пределах.
В робототехнике и мехатронике под АЛС понимают совокупность акустических датчиков и средств первичной обработки информации, предназначенных для определения геометрических и физических характеристик объектов в зоне контроля, а также их ориентации относительно выбранной системы координат. В робототехнике локационные системы очувствления обычно реализуют в соответствии с концепцией «очувствленная рука», при этом АЛС включают в контур управления роботом, а акустические датчики монтируют на каждом звене кинематической цепи.
Для описания основных принципов построения АЛС необходимо напомнить важнейшие характеристики звука. Так, распространение звука в некоторой среде описывается волновыми уравнениями
![]()
где u — амплитуда волны, или смещение частиц среды; r, с —соответственно дальность распространения и скорость волны; p , ![]() — давление и плотность среды.
— давление и плотность среды.
Частотное уравнение для звука имеет тот же вид, что и для других волновых процессов. Оно определяет длину волны ![]() гармонического колебания (тона), распространяющегося со скоростью с:
гармонического колебания (тона), распространяющегося со скоростью с:
![]()
Нижняя граничная частота ![]() ультразвука, отделяющая ее от области слышимого звука, определяется субъективными свойствами человеческого слуха и является условной (обычно принимают
ультразвука, отделяющая ее от области слышимого звука, определяется субъективными свойствами человеческого слуха и является условной (обычно принимают ![]() н = 20 кГц). Верхняя граничная частота
н = 20 кГц). Верхняя граничная частота ![]() в ультразвука обусловлена физической природой упругих волн, которые могут распространяться лишь при условии
в ультразвука обусловлена физической природой упругих волн, которые могут распространяться лишь при условии ![]() >>
>>![]() , где
, где ![]() — длина свободного пробега молекул в газах или межатомное расстояние в жидкостях и твердых телах. Следовательно,
— длина свободного пробега молекул в газах или межатомное расстояние в жидкостях и твердых телах. Следовательно, ![]() в=1/
в=1/![]() . Для газов при нормальном давлении
. Для газов при нормальном давлении ![]() в =109 Гц, а для жидкостей и твердых тел достигает 1012...
в =109 Гц, а для жидкостей и твердых тел достигает 1012... ![]() Гц.
Гц.
В зависимости от длины волны ультразвук обладает специфическими особенностями передачи и распространения, поэтому область ультразвуковых частот удобно разделить на три диапазона, Гц: 1,5-![]() ...
...![]() — низкие,
— низкие, ![]() ...
...![]() — средние и
— средние и ![]() ...
... ![]() — высокие частоты. Частоты от
— высокие частоты. Частоты от ![]() до
до ![]() Гц называют гиперзвуковыми.
Гц называют гиперзвуковыми.
Для АЛС по сравнению с ЭЛС характерна значительно меньшая (на несколько порядков) скорость распространения сигналов. Для газов она составляет 0,2... 1,5 км/с, для жидкостей — 0,5...2 км/с, для твердых сред — 2...8 км/с. Такие малые скорости, а следовательно, малые длины волн намного повышают разрешающую способность ультразвуковых методов по отношению к электромагнитным при равных частотах.
Длина звуковой волны зависит от частоты и среды распространения. Так, для воздуха в самой низкочастотной области значения А. не превышают нескольких сантиметров. В случае высоких частот значения А. в воздухе составляют 0,34...34 мкм, в воде 1,5... 150 мкм и в стали 5...500 мкм.
Для оценки звуковой волны используют следующие параметры: упругое смещение и и колебательную скорость ![]() частиц среды, акустическое давление р. Колебательную скорость следует отличать от скорости распространения волны с (скорости звука). Так, для плоской звуковой волны
частиц среды, акустическое давление р. Колебательную скорость следует отличать от скорости распространения волны с (скорости звука). Так, для плоской звуковой волны ![]() , а следовательно,
, а следовательно, ![]() «с. В свою очередь, характеристикой акустического давления в среде является интенсивность, или сила звука, определяемая через энергию звуковой волны.
«с. В свою очередь, характеристикой акустического давления в среде является интенсивность, или сила звука, определяемая через энергию звуковой волны.
Интенсивностью J называется величина, которая равна средней по времени энергии, переносимой звуковой волной через перпендикулярную направлению ее распространения единичную площадку в единицу времени. Для плоской синусоидальной бегущей волны
![]()
Параметр ![]() получил название характеристического импеданса среды. Зависимость интенсивности от акустического импеданса приводит к тому, что в более плотных средах меньшие звуковые давления вызывают большую интенсивность звука. В частности, при излучении в воду можно получить ту же интенсивность при давлении в 60 раз меньшем, чем при излучении в воздух.
получил название характеристического импеданса среды. Зависимость интенсивности от акустического импеданса приводит к тому, что в более плотных средах меньшие звуковые давления вызывают большую интенсивность звука. В частности, при излучении в воду можно получить ту же интенсивность при давлении в 60 раз меньшем, чем при излучении в воздух.
Громкость ![]() слышимых звуков одинаковой интенсивности зависит от их частот. За единицу громкости принят сон — громкость тона (чистого звука) частотой 1 кГц при интенсивности 40 дБ. Громкость звука в децибелах вычисляют по формуле
слышимых звуков одинаковой интенсивности зависит от их частот. За единицу громкости принят сон — громкость тона (чистого звука) частотой 1 кГц при интенсивности 40 дБ. Громкость звука в децибелах вычисляют по формуле
![]() = 20lg(p/
= 20lg(p/![]() ),
),
где ![]() = 2*10 5Па — минимальное давление, которое способно воспринять человеческое ухо, т. е. порог чувствительности.
= 2*10 5Па — минимальное давление, которое способно воспринять человеческое ухо, т. е. порог чувствительности.
К основным законам распространения звука относят: законы отражения и преломления звука на границах сред, законы дифракции и рассеяния звука при наличии препятствий и неоднородностей на границах и закон волно-водного распространения в ограниченных участках среды.
2. ПОСТРОЕНИЕ ИНФОРМАЦИОННОЙ МОДЕЛИ ОБЪЕКТА ПРОИЗВОДСТВА
В данном курсовом проекте в качестве объекта идентификации акустичексой локационной системы выступает плоская деталь призвольной формы. Согласно техническому заданию рассматривается плоская деталь круглой формы диаметром 125мм. Толщина рассматриваемой детали составляет 0.05мм. Деталь имеет отверстие произвольной формы, расположенное в центре детали. Диаметр отверстия составляет 27±0,05мм.
Наглядное изображение рассматриваемой детали представлено на рисунке 2.1

Рисунок 2.1 Схематическое изображение исследуемой детали.
Чертеж детали в двух проекциях представлен в Приложении В.
3. АНАЛИЗ ВОЗМОЖНЫХ ТЕХНИЧЕСКИХ РЕШЕНИЙ
Датчики АЛС подразделяют по двум основным признакам:
6. по назначению — излучатели и приемники;
7. по принципу действия — генераторные и параметрические преобразователи.
Рассмотрим сначала излучатели акустической энергии. В излучателях генераторного типа колебания возбуждаются вследствие наличия препятствия на пути постоянного потока — струи газа или. В параметрических излучателях заданные колебания электрического напряжения или тока преобразуются в механические колебания твердого тела, которое и излучает в окружающую среду акустические волны.
Жидкостные механические излучатели часто основываются на возбуждении колебаний твердой излучающей системы при натекании на нее струи Такие излучатели используют в звуковом и низкочастотном ультразвуковом диапазонах. Их недостатком является невозможность получения монохроматического излучения, а также излучения звуковых сигналов строго заданной формы (спектр их сложен и определяется конструкцией и режимом работы). КПД генераторных преобразователей составляет 5. ..50 %.
Параметрические излучатели подразделяют на две группы: обратимые преобразователи и громкоговорители. Эффективность излучателя зависит от соотношения между его размерами и длиной волны. При расчетах реальных АЛС чаще всего пользуются моделями излучателей нулевого, первого, второго, ..., n-го порядка. Излучатель нулевого порядка — монополь — представляет собой пульсирующую сферу с конечным радиусом r, которая создает в окружающей среде сферические волны. При заданной частоте мощность излучения определяется объемной скоростью излучателя независимо от его размеров.
Еще одним простейшим излучателем является акустический диполь (излучатель первого порядка). Он представляет собой сферу, осциллирующую около положения равновесия, а его излучение не имеет сферической симметрии и характеризуется направленностью. Диаграмма направленности диполя — тело вращения в виде восьмерки. Промышленные ультразвуковые излучатели, широко применяемые в системах гидроакустической связи, подводных роботах и других подводных системах, представляют собой наборную конструкцию (пакет) из диполей.
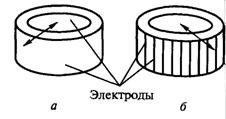
Рис. 3.1. Схемы гидроакустических излучателей с продольным (а) и поперечным (б) пьезоэффектом (стрелками показаны направления колебаний)
На рис. 3.1 представлены два гидроакустических излучателя. Оба представляют собой короткие полые цилиндры (кольца). Электроды первого установлены снаружи и изнутри цилиндра, второго — собраны из отдельных секций. Некоторые параметры излучателей представлены в табл. 3.1.
Таблица 3.1.Параметры пьезокерамических излучателей
| Модель | Назначение | f, Гц | С, нФ | Uип, В | Размеры, мм | m, кг | |||
| d | l | b | h | ||||||
| SCS-17 (США) SCS-77 (США) OMS-2000 (Швеция) ИГ-500 (Россия) | Громкого- воритель Динамик Генератор шума Гидроакустический излучатель | 700..8000 150..20000 250..5000 15..150 | 20 380 Н.д. Н.д. | 5..30 5..30 12..18 27 | - - 45 550 | 9,7 10 62 110 | 22 77 - - | 22 77 - - | 0,002 0,04 0,055 70 |
Приемники звука в зависимости от частотного диапазона разделяют на две группы: параметрические ультразвуковые приемники и микрофоны. И те и другие, как правило, устроены по принципу обратимых электроакустических преобразователей. Для них характерна линейная функция преобразования, что позволяет точно воспроизводить форму возбуждающего сигнала как в режиме приема, так и излучения. Как правило, электроакустические преобразователи обладают сравнительно узкой частотной характеристикой, что позволяет применять их в мобильных системах связи. Для повышения эффективности в конструкциях датчиков используют явления резонанса.
Задачей электроакустических преобразователей является определение звукового давления р в поле излучателя по известным значениям напряжения и тока на его входе и, наоборот, расчет напряжения или тока на выходе приемника по заданному полю (давлению р и колебательной скорости ![]() ). Электроакустические преобразователи ЛС строят на базе ДДВ. В рабочем диапазоне частот применяют пьезоэлектрические, магнитострикционные, электростатические и электродинамические датчики.
). Электроакустические преобразователи ЛС строят на базе ДДВ. В рабочем диапазоне частот применяют пьезоэлектрические, магнитострикционные, электростатические и электродинамические датчики.
Самым распространенным способом преобразования информации в электроакустических преобразователях является прямой и обратный пьезоэффект. При этом в режиме излучения используется обратный пьезоэффект, в режиме приема — прямой. Механическая колебательная система обычно представляла собой составную конструкцию, включающую пьезокерамические или кристаллические диски (стержни), зажатые между двумя металлическими блоками. В настоящее время появились пьезоэлектрические громкоговорители и микрофоны, работающие в звуковом диапазоне 0,100...20 кГц1. Частотные свойства пьезоэлектрических датчиков зависят от условий эксплуатации: в одних случаях их делают резонансными, других — широкополосными. Исходя из этого, выбирают и размеры.
Самым распространенным типом акустического приемника является микрофон. В зависимости от принципа действия различают шесть основных типов микрофонов: порошковые угольные, электродинамические, электростатические (конденсаторные и электретные), пьезоэлектрические, электромагнитные и полупроводниковые. Отличие электретного микрофона от конденсаторного заключается в том, что роль неподвижной обкладки конденсатора и источника постоянного напряжения в нем играет пластина из электрета. Недостатком его является высокое выходное сопротивление, что требует применения истокового повторителя. Действие полупроводниковых микрофонов основано на изменении сопротивления эмиттерного перехода транзистора под действием звукового давления на связанную с ним диафрагму. Несмотря на достаточно высокую чувствительность для полупроводниковых микрофонов характерна значительная неравномерность частотной характеристики, поэтому их, как порошковые и электромагнитные, применяют только в простых акустических устройствах.
В современных системах звукозаписи, как правило, используют электродинамические и конденсаторные (чаще электретные) микрофоны. Они представляют собой последовательную цепь преобразователей, содержащую, как правило, четыре каскада преобразования информации: акустический (приемный), акустико-механический, механоэлектрический и электрический (согласующий).

Рис. 3.2. Диаграммы направленности микрофона: 1— круговая; 2 — восьмеркообразная; 3 — кардиоида
В особую группу выделяют комбинированные микрофоны, или микро фоны с переменной диаграммой направленности. В них форма диаграммы определяется напряжением поляризации на электродах. Электродинамические микрофоны в зависимости от конструкции механической колебательной системы подразделяют на катушечные и ленточные. Ленточный микрофон обладает наиболее естественной передачей звука. Конденсаторные микрофоны бывают одно- и двухмембранные.
Важнейшим требованием, предъявляемым к микрофонам, является равномерность их АЧХ. У микрофонов с неравномерной АЧХ возникают нелинейные искажения при передаче звука, которые могут привести к самовозбуждению акустической системы. На рис. 3.3 представлены АЧХ электродинамического и электретного микрофонов. Как видно на рисунке, АЧХ электретного микрофона существенно равномернее, чем электродинамического.
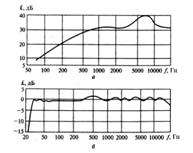
Рис. 3.3. АЧХ электродинамического микрофона МД-78 (а) и электретного микрофона МКЭ-2 (б)
Отдельный класс составляют направленные микрофоны, использующие резонансные схемы и параболические отражатели. В табл. 3.2 представлены типовые характеристики микрофонов разных типов.
Таблица 3.2 Сравнительный анализ микрофонов различных типов
| Тип микрофона | f, кГц | ∆£, дБ | S, мВ۰м²/Н |
| Порошковый Электродинамический Конденсаторный Электретный Пьезоэлектрический Электромагнитный Полупроводниковый | 0,3…3,4 0,03…15 0,03…15 0,02…18 0,1…5 0,3…5 0,1…15 | 20 12 5 2 15 20 30 | 500 1 5 1 50 5 50 |
Для работ в водной среде достаточно широко применяют преобразователи из магнитострикционных материалов (никеля, железокобальтовых сплавов или феррита), сердечник которых имеет форму стержня или кольца. В режиме излучения в этих устройствах используется магнитострикционный эффект (деформация ферромагнетика, помещенного в переменное магнитное поле), в режиме приема — магнитоупругий эффект (переменные деформации вызывают изменение магнитной проницаемости ферромагнетика и появление ЭДС). Магнитострикционные преобразователи работают приблизительно в том же частотном диапазоне, что и пьезоэлектрические, но обладают значительно большей акустической мощностью. Их КПД при работе в жидкости и в твердых телах в диапазоне низких и средних частот достигает 80 %. КПД преобразователей, работающих в гиперзвуковом диапазоне частот, существенно ниже. Для них используют специальные материалы на основе магнитострикционных пленок из никеля, пермаллоя или др.
Таблица 3.3 Параметры промышленных ультразвуковых АЛС
| Модель | Дальность действия, м | f, кГц | θ, град | ε, % | Размеры, мм | m, кг | ||
| b | h | l | ||||||
| УТ-10ДР(Россия) | 0,15…9,5 | 60 | 20 | 5 | 200 | 120 | 300 | 2,5 |
| УТ-65(Россия) | 0,001…0,3 | переменная | 7 | 1 | 85 | 40 | 165 | 0,5 |
| М-942(Германия) | 0,001…2 | 215 | 10 | 0,05 | Н.д. | Н.д. | Н.д. | 1,0 |
| UC2000-F43(Германия) | 0,1…2,0 | Н.д. | 5 | 0,5 | 45 | 20 | 210 | 0,3 |
| RS/8.5(Япония) | 0,1…6 | 140 | 5 | 0,3 | Н.д. | Н.д. | Н.д. | 0,7 |
| Zircon-4.0(США) | 0,5…12,5 | 75 | 10 | 0,5 | 62 | 30 | 110 | 0,1 |
В большинстве случаев построения АЛС ограничиваются моделью геометрической, или линейной, акустики. Эта модель соответствует зоне упругих деформаций среды распространения звука. Характер распространения волн зависит от соотношения между длиной волны ![]() звука и характерным для условий его распространения геометрическим параметром dхар (размером источника звука или препятствия на пути волны, поперечным сечением волновода и т. д.). В рамках линейной модели принимают dхар »
звука и характерным для условий его распространения геометрическим параметром dхар (размером источника звука или препятствия на пути волны, поперечным сечением волновода и т. д.). В рамках линейной модели принимают dхар » ![]() .
.
Границы применения линейной акустической модели определяются двумя основными факторами: интенсивностью звуковых волн и их частотой.
Отражение и рассеяние ультразвуковых волн на неоднородностях среды позволяют, используя звуковые фокусирующие системы, формировать в оптически непрозрачных средах звуковые изображения предметов подобно тому, как это делается с помощью световых лучей. Процесс фокусирования ультразвуковых волн посредством акустических линз, рефлекторов и с помощью излучателей вогнутой формы возможен лишь при ![]() .Благодаря фокусировке получают звуковые изображения на дисперсионных средах, например в системах звуковидения и акустической голографии; концентрируют звуковую энергию и т. д.
.Благодаря фокусировке получают звуковые изображения на дисперсионных средах, например в системах звуковидения и акустической голографии; концентрируют звуковую энергию и т. д.
При построении АЛС необходимо учитывать, что направленность проявляется только в дальней зоне излучения (зоне Фраунгофера) при r>lл. Диаграмма направленности АЛС зависит от волнового размера излучателя, т. е. от отношения характерного размера излучателя dхар к длине ![]() излучаемой волны
излучаемой волны
В активных АЛС приемник воспринимает сигнал, посланный собственным излучателем и отраженный от объекта. Чем выше направленность излучателя, тем меньше диаметр пятна озвучивания на объекте. Так, при локации плоского объекта на расстоянии 3 м диаметр пятна озвучивания составляет 4,7 см на несущей частоте 30 кГц и 2,5 см на частоте 120 кГц. Уровень полученного приемником сигнала зависит от отражательной способности и формы объекта (в среднем он в 100—1000 раз меньше излучаемого сигнала). Наилучшим для локации был бы вогнутый сферический объект с радиусом кривизны, равным расстоянию от поверхности объекта до приемника.
В АЛС используют различные виды модуляции сигналов, выбор которой зависит от назначения системы и радиуса ее действия.
Изучив все возможные варианты технических решений, пришли к выводу, что оптимальным вариантом для решения поставленной задачи, а именно идентификации плоского объекта произвольной формы, является акустическая локационная система с использованием прямого и обратного пьезоэффекта для преобразования информации в электроакустическом преобразователе.
0 комментариев