Навигация
Розробка комплекту ТЗА мікропроцесорної схеми похилого дифузійного апарату на базі мікропроцесорного комплекту Р-13
16812
знаков
1
таблица
2
изображения
Міністерство освіти і науки України
Національний Університет Харчових Технологій
Курсовий проект
з дисципліни: «Технічні засоби автоматизації»
Розробка комплекту ТЗА мікропроцесорної схеми похилого дифузійного апарату на базі мікропроцесорного комплекту Р-130
Виконав: студент групи 4АВз
Губський Д.М.
Перевірив: Баришніков О.М.
Сміла 2007
Зміст
Вступ
1. Технічні вимоги до засобів автоматизації, характеристики вхідних та вихідних сигналів контурів управління
2. Аналіз технологічного об’єкту управління: формування вимог до технічних засобів автоматизації, характеристика вхідних та вихідних сигналів контурів управління
3. Опис структурних схем основних контурів управління. Вибір типів і технічних характеристик засобів автоматизації, опис комплекту засобів автоматизації
4. Перелік і технічна характеристика засобів автоматизації контурів управління
Висновок
Список використаної літератури
ВСТУП
Автоматизація промислових процесів – один з найважливіших засобів підвищення продуктивності праці, раціонального використання сировини, покращення якості продукції. Нові можливості для високоефективної автоматизації харчових виробництв відкриває використання мікропроцесорів і мікропроцесорної техніки, робототехніки, ЕОМ.
На даному етапі автоматизації на цукрових заводах, зокрема на Смілянському, впроваджено схеми автоматизації на базі використання ЕОМ. Починають знаходити своє використання і спеціалізовані контроллери, що подібно ЕОМ керують процесом, але мають менше коло задач, яки можливо вирішити. Використання мікроконтролерів обумовлено їх перевагами перед використанням широкофункціональних мікропроцесорних комплексів. По-перше технологічні характеристики процесу змінюються досить повільно, і те що контролер спеціалізований не перешкоджає його використанню. По-друге ціна мікроконтролера значно менша ніж ЕОМ, об’єм задач, які виконуються значно менший. По-третє, якщо потрібен щит контролю і управління, до контролера можна під’єднати ЕОМ, при чому система обійдеться підприємству дешевше. Вчетверте використання вітчизняних засобів автоматизації сприяє їх розвитку.
Завданням проекту є автоматизація станції дефекосатурації – регулювання рН станції І сатурації. Метою проекту є підвищення ефективності праці, покращення якості продукції, яка випускається, створення умов для оптимального використання ресурсів.
1. Технічні вимоги до засобів автоматизації, характеристики вхідних та вихідних сигналів контурів управління
Питання вибору вимірювальних комплектів для систем автоматичного контролю, регулювання, управління виникає ще при проектуванні схем автоматизації. Задачу вибору приладів вирішують шляхом переходу від загальних питань до часткових. На першому етапі вибирають комплекс технічних засобів для всієї системи, потім вимірювальні комплекти для окремих параметрів.
Вибір приладів ґрунтується на наступних пунктах:
· Врахування середовища;
· Діапазон виміру і клас точності;
· Врахування вхідних і вихідних сигналів;
· Техніка безпеки;
· Економічність.
Пневмоелектричний перетворювач призначений для перетворення пневматичного сигналу в електричний для сприйняття сигналу системою. Має уніфікований вихідний сигнал (4-20мА), що спрощує його застосування, зокрема – підключення до контролера (без використання нормуючого перетворювача.).
Для вимірювання рівня використано рівнемір ЭРСУ-4. Контактний рівнемір має більш надійність в порівнянні з іншими.
Для вимірювання витрат використовуємо індукційний витратомір типу 5РИМ. Він також має високу ступінь точності (завдяки точному індукційному сигналу) та надійності. Він досить простий в налаштуванні. Також має уніфікований вихідний сигнал (4-20мА).
Для контролю рН-властивості речовини використовуємо чутливий елемент ДПг-4М-1 в комплекті з високоомним перетворювачем промисловим типу П215. Комплект досить простий в наладці та надійний в експлуатації. Має високий рівень точності.
Уніфіковані сигнали пропорційні тому чи іншому параметру надходять до контролера (Р-130), де за опрацьовуються за певним алгоритмом.
Сигнал регулювання виводиться з контролера через канал виведення аналогових сигналів в діапазоні 4-20мА.
Керуючий сигнал виводиться на виконавчий механізм ПСП-1. Цей виконавчий механізм відрізняється надійністю в експлуатації, та точності покрокового ходу, що є досить важливим для підтримання точності протікання технологічного процессу.
Основою для вибору в якості приводу саме ПСП-1 була його здатність формувати значні зусилля з досить незначним запізненням.
2. Аналіз технологічного об’єкту управління: формування вимог до технічних засобів автоматизації, характеристика вхідних та вихідних сигналів контурів управління
В якості контролера використовується Реміконт-130.
Мікропроцесорний контролер Р-130 – компактний малоканальний багатофункціональний контролер, призначений для автоматичного регулювання та логічного керування технологічними процесами. Він має наступні характеристики.
До 15 контролерів Р-130 різних моделей можуть об’єднуватись в локальну мережу «Транзит» і створювати єдину керуючу систему. Якщо один із контролерів, приєднаних до мережі «Транзит» виходить з ладу, - робота мережі не порушується. Це дає змогу значно підвищити показники надійності функціонування системи керування.
Незалежно від моделі, Р-130 має 30 модифікацій, які відрізняються за наявністю та кількістю аналогових та дискретних входів – виходів. Максимальна кількість входів – виходів для одного контролера не перевищує 32.
Аналогові вхідні сигнали: уніфіковані постійного струму 0-5, 0-20, 4-20 мА / 0-10В;
Дискретні вхідні сигнали: стан контактів або напруга постійного струму будь-якої полярності – логічний «0» - %....2.4 В, логічна «1» - 24/19.2…28,8/В
Аналогові вихідні сигнали: уніфіковані постійного струму 0-5, 0-20, 4-20 мА і 0-10 В.
Виконавчий механізм підбирається під вихідний сигнал контролера, так як Р-130 має блок підсилювача потужності БУМ – 20, який має вбудовані герконові реле і може комутувати струм величиною до 2А напругою до 220В.
Реміконт -130 являє собою комплекс технічних засобів, що складається з окремих блоків. Кожний блок є автономним та функціонально закінчиним виробом. Блоки можуть застосовуватись у різних сполученнях. Конкретний склад блоків, що входять у реміконт, обумовлюється під час замовлення.
Блоки Реміконта – 130:
БК-21 Блок контролера регулюючої моделі
БК-22 Блок контролера логічної моделі
БК-23 Блок контролера неперервно-дискретної моделі
БШ-21 Блок шлюза
ПН-21 Пульт настроювання
БП-21 Блок живлення
БУТ-20 Підсилювач для термопар
БУС-20 Підсилювач для термометрів опору
Бум-20 Підсилювач потужності
БПР-20 Блок перемикання
МБС-20 Міжблоковий з’єднувач
КБС-20 Клемна колодка
КБС-21 Клемно-блоковий з’єднувач
КБС-22 Клемно-блоковий з’єднувач
КБС-23 Клемно-блоковий з’єднувач
РН-1 Резистори нормувальні
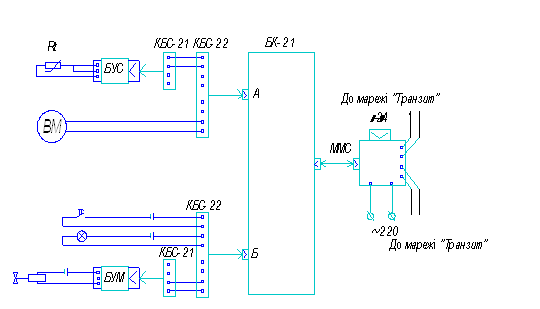
Рис. 2 Структурна схема під’єднання до Реміконта – 130.
На рис. 2 показана схема підключення до блока контролера різних типів вхідних та вихідних сигналів з використанням різних блоків.
Для під єднання термометрів опору використовується блоки БУС-20, які виконують функції нормувальних перетворювачів і мають два незалежних канали для під’єднання двох термометрів опору. Кожний з каналів блока БУС-20 може незалежно настроюватись на роботу з термометрами опору заданого градуювання. Термометри опору приєднуються до блока БУС-20, а вихідні уніфіковані сигнали знімаються з розніму, до якого можна приєднати клемно-блоковий з’єднувач КБС-21.
Уніфіковані аналогові аналогові вхідні та вихідні сигнали можуть безпосередньо під’єднуватись до Р-130. Фізично для цього використовуються клемно-блокові з’єднувачі КБС-22 та КБС-23.
Вхідні дискретні сигнали приєднуються безпосередньо до клемКБС-22 у вигляді напруги 24В постійного струму. При під’єднанні дискретних виходів потрібно враховувати, що безпосередньо транзисторні ключі дискретних виходів мають максимальний струм навантаження 0,3А. Тому для забезпечення керування більш потужними виконавчими механізмами необхідно використовувати блок підсилювача потужності БУМ-20, який має вбудовані геконові реле і може комутуватися струм величиною до 2А напругою до 220В. Блок контролера приєднується до блока живлення БП-21 За допомогою між модульного з’єднувача МБС-20, на обох кінцях якого розташовані вилки рознімів.
Крім живлення контролера і вхідних ланцюгів, блок живлення виконує ще одну дуже важливу функцію: через нього блок контролера приєднується до мережі „Транзит”. Саме тому при виході з ладу одного з контролерів, його можна від’єднати від блока живлення, а мережа „Транзит” продовжує залишатися працездатною.
0 комментариев