Навигация
ПОБУДОВА СХЕМИ ПЕРВИННОГО ВИМІРЮВАЛЬНОГО ПЕРЕТВОРЮВАЧА ТА РОЗРАХУНОК ПАРАМЕТРІВ ЕЛЕМЕНТІВ
30202
знака
3
таблицы
10
изображений
3. ПОБУДОВА СХЕМИ ПЕРВИННОГО ВИМІРЮВАЛЬНОГО ПЕРЕТВОРЮВАЧА ТА РОЗРАХУНОК ПАРАМЕТРІВ ЕЛЕМЕНТІВ
3.1 Побудова функціональної схеми ВП
Розглянувши переваги та недоліки згаданих вище давачів вибираємо конструкцію на основі індуктивного вимірювача нелінійних переміщень. Даний перетворювач складається з двох котушок індуктивності. Через одну з них (котушку збудження) протікає змінний струм. В другій (приймальній) котушці за рахунок взаємної індукції наводиться ЕРС індукції магнітного поля. Котушки розміщені одна навпроти одної (на грудях та спині піддослідного), в процесі дихання грудна клітка (черевна порожнина) розширюється та відстань між котушками змінюється. При зміні відстані змінюється і ЕРС магнітної індукції в другій котушці. Оскільки в процесі дихання, в залежності від індивідуальних особливостей організму груди і живіт зносять різний внесок в об’єм вдихуваного повітря (торакальний і абдомінальний внесок) то потрібно спроектувати двоканальний ВП
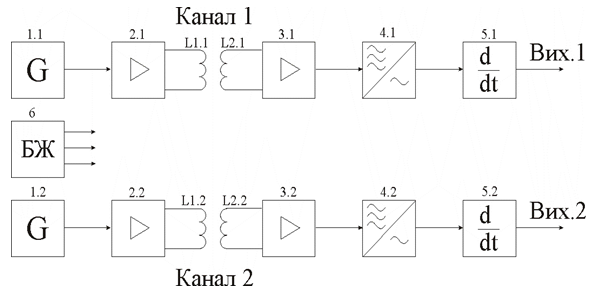 Рис. 3.1 – Схема функціональна ВП частоти дихання
Рис. 3.1 – Схема функціональна ВП частоти дихання
Як видно з рисунка, пристрій складається з двох ідентичних каналів зі спільним блоком живлення. Генератор 1 виробляє синусоїдальну напругу, що підсилюється та поступає на котушку збудження (L1). Для уникнення взаємного впливу каналів частоти мають відрізнятися в 1,5…2 рази. Синусоїдальна форма вибрана для того, щоб не створювати завади за рахунок вищих гармонік.
Права частина схеми (приймальна) містить в собі приймальну котушку (L2), резонансний підсилювач 3, детектор 4 та диференціюючий пристрій 5. За рахунок взаємної індукції в котушці давача (приймальній котушці) наводиться ЕРС. Напруга з котушки подається на резонансний підсилювач 3, налаштований на частоту генератора відповідного каналу. З виходу підсилювача змінна напруга (що, по суті, являє собою амплітудно-модульований сигнал) подається на детектор 4. Через пристрій зсуву нуля (диференціюючий пристрій 5) випрямлена напруга, що залежить від відстані між котушками, подається на вихідний роз'єм приладу ("Вихід 1"). Далі вона поступає на осцилограф, самописець, вольтметр або інший реєструючий прилад для візуалізації чи подальшої обробки. Пристрій зсуву нуля служить для установки нульової напруги на виході приладу при переведенні котушки збудження і котушки давача в початкове положення.
Блок живлення БП виробляє необхідну для роботи приладу напругу. Для коректної роботи приладу бажано, щоб блок живлення виробляв стабільну двополярну напругу в діапазоні 5…15В.
3.2 Розрахунок характеристик передаючої та приймальної котушок
Згідно закону електромагнітної індукції Фарадея, ЕРС, наведена в приймальній котушці обчислюється за виразом [1]:
 (3.1)
(3.1)
де Ф – магнітний потік в осерді;
N2 – кількість витків (приймальної котушки).
Згідно теореми Гауса для однорідного поля і плоскої поверхні можемо записати [2]:
![]() (3.2)
(3.2)
де S2 – січення осердя приймальної котушки
Перейдемо від магнітної індукції до напруженості магнітного поля. Ці дві величини зв’язані між собою співвідношенням [2]:
![]() (3.3)
(3.3)
![]() (3.4)
(3.4)
де: m0 – магнітна стала (магнітна проникність вакууму). m0 = 4p×10-7 Гн/м
mОС2 - магнітна проникність сердечника приймальної котушки безрозмірна величина;
![]() - напруженість магнітного поля
- напруженість магнітного поля
Якщо продиференціювати (3.4) по часу одержимо:
 (3.5)
(3.5)
Тепер запишемо, яким чином залежить напруженість магнітного поля в певній точці простору (на заданій відстані від котушки) від параметрів котушки збудження.
Згідно закону Біо-Савара-Лапласа (БСЛ) можемо записати наступне співвідношення [2]:
 (3.6)
(3.6)
де: R – відстань між котушкою і точкою, в якій ми хочемо дізнатися
значення магнітної індукції;
і1 – струм, що протікає через котушку збудження. Оскільки котушка живиться змінним струмом, то і1=І10sin2(pft)
I10 – амплітуда струму в котушці збудження;
N – кількість витків котушки збудження;
m - магнітна проникність середовища між котушками. Безрозмірна величина. Для немагнітних матеріалів m»1.
Продиференціюємо праву і ліву частину рівності по часу. Отримаємо:
 (3.7)
(3.7)
Підставивши (3.2) в (3.6) отримаємо:
 (3.8)
(3.8)
Враховуючи, що і1=І10sin(2pft) запишемо:
|
| (3.9) |
Підставимо (3.9) та (3.5) в (3.1):
![]() (3.10)
(3.10)
Тепер розрахуємо число витків котушок, виходячи з умови, що на відстані між ними рівній 0,5м в приймальній котушці наводиться ЕРС 2В (в правій і лівій частині рівності амплітудні значення ЕРС та струму можемо замінити на діючі). Для цього необхідно задатися значеннями величин, яких не вистачає.
- Струм через котушку збудження І10=100мА;
- Частота рівна: для першого каналу f1=4кГц, для другого каналу f2=6кГц;
- Відносна магнітна проникність осердь котушок mОС1=mОС2=600;
- Котушки намотані на осердях круглого січення діаметром 3мм. Площа поперечного перерізу осердь рівна:
 (3.11)
(3.11)
де d – діаметр осердя

Добуток числа витків котушок рівний:
 (3.12)
(3.12)
де e - ЕРС, що наводиться в приймальній котушці. e=Е0cos(2pft);
m0 – магнітна стала. m0=4p×10-7(Гн/м).
Число витків приймальної котушки приймаємо в 10 разів більшим від числа витків котушки збудження: (N2=10N1).
|
| (3.13) |
Для першого каналу:

Для другого каналу:

Похожие работы
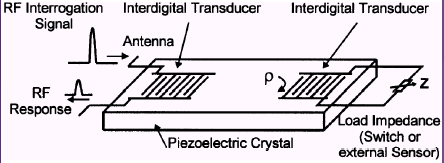
... чено раніше, якщо вибрати правильний напрямок поширення хвилі, можна створити бездротової датчик температури. Середовище поширення міняється разом з температурою, впливаючи на дані на виході. Нижче наведені деякі найбільш загальні способи застосування датчиків акустичних хвиль. Термодатчик будується на термозалежності швидкості поверхневих хвиль, яка визначається напрямком і типом кристалічного ...
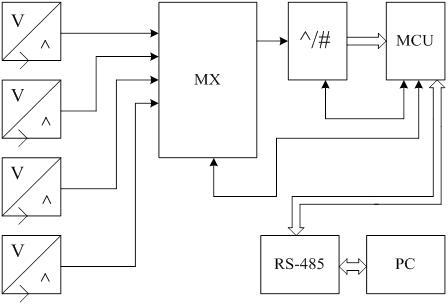

... габаритність та точність. Розглянемо першу структурну схему, яка приведена на рисунку 2.1. Рисунок 2.1 – Перший варіант реалізації структурної схеми системи для визначення складу вихлопних газів автомобілів Позначення на схемі: V/ – датчик концентрації, який використовується для визначення концентрації вихлопних газів автомобілів; МХ – мультиплексор; – аналого-цифровий перетворювач; ...
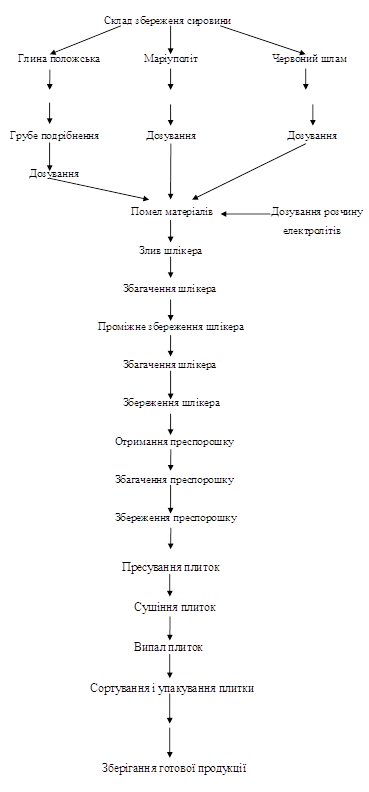
... ; 11 - канал конвеєра; 12 - відкрита частина конвеєра; 13,14,15 - вентилятори; 16 - теплообмінник Рисунок 2.6 - Потоково-конвеєрна лінія Буде встановлено 2 потоково-конвеєрних ліній для виробництва плиток для підлоги продуктивністю 400 тис м²/рік. 2.5.11 Розрахунок складу готової продукції При розрахунку складу готової продукції необхідно знати запас виробів, вид упаковки, площу, що ...
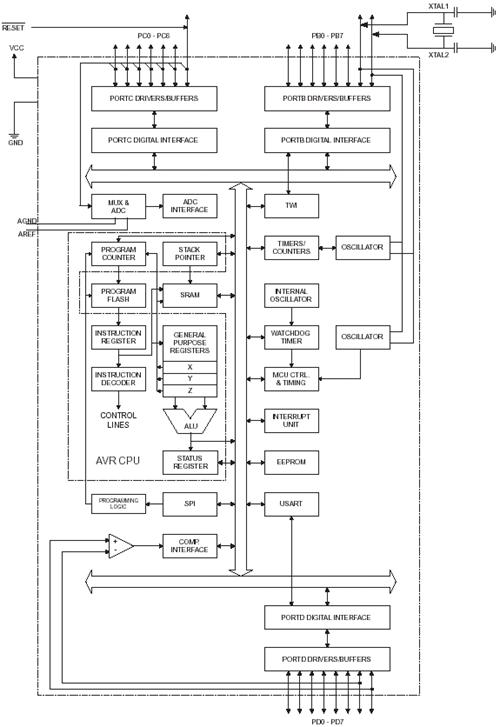
... обміну даними з ПЭВМ у процесі виконання програми користувача; 11. Вкажіть типи буферних схем, використаних в УУМС-2. Їх призначення та особливості роботи. 12. Дайте визначення адресного простору мікропроцесорної системи та розпишіть його розподіл в УУМС-2. Адресний простір УУМС складається з областей, состав яких показаний у табл.2. Варто звернути увагу, що внутрішні адресні області ...
0 комментариев